Изобретение относится к области контроля движения дорожного транспорта и может быть использовано для регистрации нарушений правил дорожного движения (ПДД) конкретными транспортными средствами (ТС), а также для мониторинга дорожной обстановки и сбора статистических данных.
Известен способ регистрации нарушений ПДД (патент RU 2480841, G08G 1/01 (2006.01), опубл. 27.04.2013. Бюл. №12), согласно которому с помощью средств видеофиксации получают изображения заданного участка дороги с движущимися ТС, передают данные в электронно-вычислительное устройство по имеющимся каналам связи, производят обработку данных о движении ТС и дорожной обстановке автоматическими программными средствами, сравнивают полученные данные о движении ТС с допустимыми по ПДД на данном участке дороги, производят автоматическую квалификацию и фиксацию нарушений ПДД и нештатных ситуаций с идентификацией конкретных нарушителей ПДД, при этом в качестве средства видеофиксации используют две или более видеокамеры, которые располагают на заданном расстоянии друг от друга таким образом, чтобы они снимали один и тот же участок дороги с ТС, при этом обработку данных о движении ТС производят с применением трехмерной реконструкции заданного участка дороги с ТС по изображениям указанных видеокамер и определением трехмерного положения ТС относительно дороги, по которой перемещается указанное ТС, причем для определения трехмерной реконструкции заданного участка дороги с ТС в абсолютном масштабе расстояний используют набор двух или более контрольных точек заданного участка дороги или ТС, абсолютные расстояния между которыми заранее известны.
Недостатком данного способа является то, что для его реализации необходимо построение трехмерной реконструкции заданного участка дороги с ТС, а для обеспечения необходимых данных требуется минимум две видеокамеры, которые были бы направлены на один участок дороги. Необходимость использования двух видеокамер экономически невыгодна, создание и обработка трехмерной реконструкции требует дополнительных компьютерных ресурсов, что в свою очередь также повышает стоимость использования описанного способа. При необходимости одновременно работать со многими объектами (что происходит при плотном потоке ТС) требования к компьютерным ресурсам возрастают, а при недостаточности этих ресурсов происходит сбой компьютерной системы, что крайне негативно сказывается на обработке информации и принятии решений по наличию нарушений ПДД. Кроме того, этот способ требует определения контрольных точек заданного участка дороги или ТС, абсолютные расстояния между которыми заранее известны. Ориентировка на контрольные точки, принадлежащие государственному регистрационному номерному знаку на наш взгляд более практична, хотя и она не является универсальной, поскольку государственные регистрационные номерные знаки разных государств выполнены по разным стандартам и этот факт не позволяет утверждать, что расстояния между крайними левыми и крайними правыми точками государственных регистрационных номерных знаков всех ТС равны между собой. А неправильное определение контрольных точек влечет за собой искажение трехмерной реконструкции и, соответственно, искажение результатов определения наличия нарушений ПДД конкретным ТС.
Известен также способ обеспечения безопасности дорожного движения (патент RU 2469890, МПК B60W 30/08, G08G 1/16, G01C 21/04 (2006.01), опубл. 20.12.2012 г.), который включает синхронизацию часов опорных передатчиков, измерение времени пробега радиосигнала от антенн трех или более опорных радиопередатчиков, находящихся на удалении от ТС и пешехода, до антенны радионавигационного устройства, находящегося на ТС или пешеходе, вычисление координат ТС и пешехода с помощью вычислительного устройства, передачу по радиоканалу информации о координатах ТС и пешеходов, их идентификационных номеров в информационный компьютерный центр, передачу участникам дорожного движения предупреждающих сигналов, при этом вдоль дорожного полотна в фиксированных точках с известными трехмерными координатами антенн устанавливают радиовышки с опорными радиопередатчиками, синхронизацию часов опорных радиопередатчиков с часами информационного компьютерного центра осуществляют по имеющейся между ними оптоволоконной линии связи, создают цифровую карту дороги путем разбиения дорожного полотна на пиксели с известными трехмерными координатами, с указанием координат и значений дорожных знаков, светофоров, на ТС устанавливают два радионавигационных устройства, разнесенных вдоль продольной оси ТС, и по их постоянно измеряемым трехмерным координатам и по цифровой карте дороги определяют положение ТС относительно осевой линии дорожного полотна в любой момент времени.
Основным недостатком этого способа является необходимость устанавливать радионавигационные устройства на ТС и пешеходах, данные о которых необходимо собрать. Практика показывает, что автовладельцы не откликаются на предложения об установке радионавигационных устройств на своих автомобилях с целью обеспечения контроля за данными ТС. При этом ТС, на которых не установлены радионавигационные устройства не могут быть выявлены этим способом, поскольку они не передают информацию, необходимую для их идентификации в систему, что делает способ крайне мало функциональным.
Известен также наиболее близкий по технической сути к заявляемому способ регистрации нарушений ПДД (патент RU 2493604, МПК G08G 1/054 (2006.01), опубл. 20.09.2013. Бюл. №26), при котором с помощью датчиков измерений физических величин включающих по крайней мере средства видеофиксации получают изображение заданного участка дороги с движущимися ТС, передают данные в электронно-вычислительное устройство по имеющимся каналам связи, производят обработку данных о движении ТС и дорожной обстановке автоматическими программными средствами, сравнивают полученные данные о движении ТС с допустимыми по ПДД на данном участке дороги, производят автоматическую квалификацию и фиксацию нарушений ПДД и нештатных ситуаций с идентификацией конкретных нарушителей ПДД, при этом в качестве средства видеофиксации используют одну заранее откалиброванную видеокамеру, обработку данных о движении ТС производят путем определения по изображениям указанной видеокамеры положений ТС относительно дороги, по которой перемещаются указанные ТС, а по ряду последовательных изображений указанной видеокамеры определяют и скорости ТС, причем для определения скоростей и положений ТС относительно дороги в абсолютном масштабе расстояний используют контрольные точки ТС, абсолютные расстояния между которыми заранее известны, калибровку видеокамеры производят с помощью калибровочного шаблона, который располагают перед видеокамерой на дороге для ТС, на котором выделяют точки, расстояния между которыми заранее известны. Также определение положения ТС относительно дороги осуществляют через определение положения ТС относительно используемой видеокамеры, а положение видеокамеры относительно дороги запоминают при калибровке видеокамеры.
Недостатком способа по прототипу является отсутствие привязки данных, получаемых от видеокамеры ко времени, в которое был сделан каждый конкретный кадр. На наш взгляд, этот недостаток является существенным, так как видеоряд не может являться доказательной базой по нарушениям ПДД без привязки видеокадров к точному времени их съемки, поскольку может быть оспорен в судебном порядке как недостаточный факт доказательства вины.
Вторым недостатком способа по прототипу является необходимость трудоемкой и точной калибровки видеокамеры перед началом реализации этого способа. От точности калибровки камеры зависит, будет ли способ вообще пригоден для регистрации нарушений ПДД, поскольку определение положения ТС относительно дороги осуществляют через определение положения ТС относительно используемой видеокамеры, а положение видеокамеры относительно дороги запоминают при калибровке видеокамеры.
Еще одним недостатком описанного способа по прототипу является необходимость ориентации на контрольные точки ТС, абсолютные расстояния между которыми заранее известны для идентификации и определения положения ТС относительно дороги в абсолютном масштабе расстояний. В способе по прототипу предложено в качестве контрольных точек ТС использовать точки государственного номерного знака ТС, размеры и рисунок которого заданы государственным стандартом, или контрольные точки, принадлежащие циферно-буквенному обозначению ТС на государственном номерном знаке. Но такой подход, на наш взгляд, не является правильным, поскольку в транспортном потоке часто встречаются ТС, государственные регистрационные номерные знаки которых выполнены по государственным стандартам разных стран. И ориентация на один государственный стандарт не может быть применена для таких ТС.
Также отметим, что известные приемники сигналов точного времени (ГЛОНАСС, GPS и т.д.) не позволяют присваивать каждому кадру уникальную метку времени, поскольку принимают сигнал точного времени один раз в определенный промежуток времени (ориентировочно один раз в секунду). За это время камера делает более одного кадра (кадровая частота видеокамеры не менее 24 кадров в секунду). Соответственно, минимум 24 кадрам будет присвоена одинаковая метка времени, что на наш взгляд является недопустимым.
Техническим эффектом настоящего изобретения является обеспечение синхронизации времени и места расположения ТС относительно заранее сформированной модели участка дороги любой геометрии, в том числе перекрестков и железнодорожных переездов, и эффективности обработки полученной информации, и, как следствие, объективности получения информации о дорожной обстановке и повышение доказательной способности формируемой доказательной базы по нарушениям ПДД конкретным ТС.
Для решения поставленной технической задачи в заявляемом способе регистрации нарушений ПДД, при котором с помощью датчиков измерений физических величин, включающих по крайней мере средства видеофиксации, получают изображение заданного участка дороги с движущимися ТС, передают данные в электронно-вычислительное устройство по имеющимся каналам связи, производят обработку данных о движении ТС и дорожной обстановке автоматическими программными средствами, сравнивают полученные данные о движении ТС с допустимыми по ПДД на данном участке дороги, производят автоматическую квалификацию и фиксацию нарушений ПДД и нештатных ситуаций с идентификацией конкретных нарушителей ПДД, согласно изобретению в качестве датчика измерений физических величин дополнительно используют средство формирования точного времени, состоящее из приемника сигналов точного времени и модуля генерации постоянной частоты, при этом предварительно осуществляют формирование модели участка дороги, на котором будет осуществляться регистрация нарушений ПДД, основываясь на сформированной модели участка дороги формируют пакет параметров инсталляции и настроек упомянутых датчиков измерений физических величин и их взаимосвязей друг с другом, в соответствии с которым производят инсталляцию и настройку упомянутых датчиков, а обработку данных о движении ТС и дорожной обстановке осуществляют путем преобразования данных, полученных от датчиков измерений физических величин, в координаты сформированной модели участка дороги, при этом автоматическую квалификацию и фиксацию нарушений ПДД и нештатных ситуаций проводят основываясь на теории графов; при формировании модели участка дороги, на котором будет осуществляться регистрация нарушений ПДД, создают модель участка дороги, которая соответствует тому участку, на котором будет осуществляться регистрация нарушений ПДД, наносят всю соответствующую дорожную разметку, указывают разрешенные и запрещенные направления движения и перестроения, проводят проверку формируемой модели на наличие противоречий, задают светофорное регулирование, на сформированной модели определяют зоны - неделимые участки дороги с нанесенным на них определенным видом дорожной разметки; формирование пакета параметров инсталляции и настроек упомянутых датчиков измерений физических величин и их взаимосвязей друг с другом проводят на основе данных, полученных при формировании модели участка дороги, на котором будет осуществляться регистрация нарушений ПДД в соответствии с данными, полученными от самих датчиков измерений физических величин; на полученном с помощью датчиков измерений физических величин, включающих по крайней мере средства видеофиксации, изображении заданного участка дороги, на котором осуществляют регистрацию нарушений ПДД также определяют зоны - неделимые участки дороги с нанесенным на них определенным видом дорожной разметки; для зон, определенных на полученном с помощью датчиков измерений физических величин, включающих по крайней мере средства видеофиксации, изображении заданного участка дороги, на котором осуществляется регистрация нарушений ПДД, проводят привязку к соответствующим зонам на сформированной модели участка дороги; данные, полученные от датчиков измерений физических величин, по меньшей мере от средства видеофиксации и средства формирования точного времени, сопоставляют; обработку данных о движении ТС и дорожной обстановке автоматическими программными средствами производят путем преобразования данных, полученных от датчиков измерений физических величин, в координаты трека перемещения на сформированной модели участка дороги с учетом заранее определенных зон на модели участка дороги; в качестве трека используют набор последовательных точек траектории движения ТС, в котором каждой точке соответствует уникальный момент времени; автоматическую квалификацию и фиксацию нарушений ПДД и нештатных ситуаций проводят используя граф выявления нарушений ПДД, причем вершинами графа являются зоны, определенные на сформированной модели, а ребрами - разрешенные и запрещенные переходы между зонами; идентификацию конкретных нарушителей ПДД производят по распознанному государственному регистрационному номерному знаку ТС; после автоматической квалификации и фиксации нарушений ПДД формируют пакеты доказательной базы, состоящие из видеокадров с запечатленным на них ТС с распознанным государственным регистрационным номерным знаком с присвоенными им метками точного времени, видеокадров, подтверждающих наличие факта нарушения ПДД данным ТС с присвоенными им метками точного времени, документа о составе нарушения ПДД и отправляют сформированные пакеты доказательной базы на внешние приемники информации; сформированные пакеты доказательной базы передают в архив доказательной базы для обеспечения возможности затребования через определенное время при необходимости; в качестве датчиков измерений физических величин используют средства радиолокации и/или средства считывания сигналов управления светофором.
Благодаря тому, что заявляемый способ предусматривает предварительное формирование модели участка дороги, на котором будет производиться регистрация нарушений ПДД, а также использованию дополнительно в качестве датчика измерений физических величин по меньшей мере средства формирования точного времени предлагаемой нами конструкции, с последующей синхронизацией данных, полученных по крайней мере от средств видеофиксации и от средств формирования точного времени, реализуется возможность каждому кадру, отснятому видеокамерой, присваивать уникальную метку точного времени, позволяющую однозначно интерпретировать последовательность кадров. На наш взгляд, крайне важным является присвоение каждому кадру именно уникальной, то есть такой, которая не повторяется, метки времени. Заявляемый способ предполагает включение в состав средств формирования точного времени не только приемника сигналов точного времени, но и модуля генерации постоянной частоты. Причем режим работы модуля генерации постоянной частоты соотносится с кадровой частотой применяемой видеокамеры. Так, если кадровая частота видеокамеры равна 24 кадра/сек, то модуль генерации постоянной частоты настраивают таким образом, чтобы он генерировал не менее 24 импульсов в секунду. Каждый из генерируемых модулем генерации постоянной частоты импульсов и является уникальной меткой точного времени, которая впоследствии присваивается каждому кадру. Модуль генерации постоянной частоты регулярно поверяет частоту посылаемых им импульсов, ориентируясь на получаемые сигналы точного времени от приемника сигналов точного времени. В случае отсутствия следующего сигнала точного времени, модуль генерации постоянной частоты продолжает генерировать импульсы с частотой, установленной при предыдущей поверке. При реализации предлагаемого способа в качестве датчиков измерений физических величин, кроме средств видеофиксации, возможно использовать другие датчики измерений физических величин (например, средства радиолокации, средства считывания сигналов управления светофором и т.д.). В случае использования разных датчиков измерений физических величин, средство формирования точного времени присваивает уникальные метки точного времени всем потокам данных, которые поступают от всех датчиков измерений физических величин. По заявляемому способу квалификацию и фиксацию нарушений ПДД и нештатных ситуаций производят автоматическими программными средствами, основанными на теории графов, в частности графа выявления нарушений ПДД. Автоматическая квалификация и фиксация нарушений ПДД конкретным ТС производится посредством анализа трека перемещения ТС соответственно графу выявления нарушений ПДД, у которого вершинами являются зоны, определенные на сформированной модели участка дороги, на котором будет осуществляться регистрация нарушений ПДД, а ребрами - разрешенные и запрещенные переходы между зонами. Построение трека перемещения ТС производят автоматическими программными средствами на основе данных, поступающих от всех датчиков измерений физических величин. Для построения трека используют набор последовательных точек траектории движения ТС, в котором каждой точке соответствует уникальный момент времени. Идентификацию ТС осуществляют по распознанному государственному регистрационному номерному знаку ТС.
Таким образом можно сделать вывод, что заявляемый способ регистрации нарушений ПДД обеспечивает повышение объективности получения информации за счет снабжения входящих данных метками точного времени, повышение эффективности обработки информации о дорожной обстановке путем исключения зависимости определения положения ТС относительно дороги от определения положения ТС относительно используемой видеокамеры, а также универсализацию способа путем отказа от ориентации на контрольные точки ТС, абсолютные расстояния между которыми заранее известны для идентификации и определения положения ТС относительно дороги в абсолютном масштабе расстояний и, как следствие, повышение доказательной способности формируемой доказательной базы по нарушениям ПДД конкретным ТС.
Варианты заявляемого способа, представленные в пунктах формулы изобретения, являются оптимальными вариантами предложения, поскольку обеспечивают максимальные технические эффекты, описанные выше.
На чертеже представлена схематичная последовательность этапов реализации способа регистрации нарушений ПДД, заключающегося в следующем.
Этап 1 - формируют модель участка дороги, на котором будет осуществляться регистрация нарушений ПДД. Для этого при помощи автоматических программных средств создают модель участка дороги, который соответствует тому участку, на котором будет осуществляться регистрация нарушений ПДД. Затем наносят всю соответствующую дорожную разметку, указывают разрешенные и запрещенные направления движения и перестроения. Далее автоматическими программными средствами проводят проверку формируемой модели на наличие противоречий. После чего модели задают светофорное регулирование. На сформированной модели определяют зоны - неделимые участки дороги с нанесенным на них определенным видом дорожной разметки;
Этап 2 - формируют пакет параметров инсталляции и настроек датчиков измерений физических величин и их взаимосвязей друг с другом, основываясь на сформированной модели;
Этап 3 - проводят инсталляцию и настройку датчиков измерений физических величин, включающих по меньшей мере средства видеофиксации, на места, которые предусмотрены сформированным пакетом параметров инсталляции и настроек. Заявляемый способ предусматривает возможность определенного варьирования при инсталляции и настройке датчиков измерений физических величин, поскольку сформированный пакет параметров инсталляции и настроек содержит данные, указанные в виде диапазонов параметров;
Этап 4 - получают изображение участка дороги, на котором осуществляется регистрация нарушений ПДД, с установленного средства видеофиксации. На полученном изображении, так же как и на сформированной модели, обозначают зоны и проводят привязку зон на полученном изображении к соответствующим зонам на сформированной модели участка дороги;
Этап 5 - получают от датчиков измерений физических величин потоки данных о перемещении ТС по участку дороги, на котором осуществляется регистрация нарушений ПДД, по меньшей мере от средства видеофиксации (изображение с движущимися ТС) и от средства формирования точного времени (метки точного времени) и сопоставляют полученные данные;
Этап 6 - передают данные в электронно-вычислительное устройство по имеющимся каналам связи;
Этап 7 - производят обработку данных о движении ТС и дорожной обстановке автоматическими программными средствами путем преобразования данных, полученных от датчиков измерений физических величин, в координаты трека перемещения ТС на сформированной модели участка дороги с учетом заранее определенных зон на модели участка дороги. В качестве трека используют набор последовательных точек траектории движения ТС, в котором каждой точке соответствует уникальный момент времени;
Этап 8 - автоматическими программными средствами сравнивают полученные данные о движении ТС с допустимыми по ПДД на данном участке дороги, производят автоматическую квалификацию и фиксацию нарушений ПДД и нештатных ситуаций с идентификаций конкретных нарушителей ПДД. Принятие решения о наличии нарушения ПДД конкретным ТС производится автоматическим программным средством, основанным на теории графов. В заявляемом способе регистрации нарушений ПДД - графа выявления нарушений ПДД. Вершинами графа выявления нарушений ПДД являются зоны, определенные на сформированной модели, а ребрами - разрешенные и запрещенные переходы между зонами. Идентификацию конкретных нарушителей ПДД проводят по распознанному государственному регистрационному номерному знаку ТС;
Этап 9 - автоматическими программными средствами формируют пакеты доказательной базы из видеокадров с присвоенными им метками точного времени, также формируют документ о составе нарушения ПДД и отправляют сформированные пакеты доказательной базы на внешние приемники информации. Одновременно сформированные пакеты доказательной базы попадают в архив доказательной базы, из которого могут быть затребованы через определенное время при необходимости.
Пример конкретной реализации заявляемого способа регистрации нарушений ПДД
Регистрация нарушений ПДД производится на участке дороги с двухсторонним движением (по две полосы движения в каждую сторону) и регулируемым пешеходным переходом.
Предварительно осуществили формирование модели участка дороги, на котором будет осуществляться регистрация нарушений ПДД. С этой целью при помощи автоматических программных средств создали модель - дорогу с двухсторонним движением, по две полосы движения в каждую сторону. Затем нанесли дорожную разметку - пешеходный переход, стоп-линии, разделительную полосу, разметку между полосами движения, указали разрешенные направления движения (в конкретном примере разрешено движение только прямо) и перестроения (в конкретном примере разрешено перестроение в попутном направлении), запрещенные направления движения и перестроения (в конкретном примере - запрещен правый/левый поворот и разворот). Далее автоматическими программными средствами провели проверку формируемой модели на наличие противоречий. После чего модели задали светофорное регулирование. Также на сформированной модели определили зоны - неделимые участки дороги с нанесенным на них определенным видом дорожной разметки (для рассматриваемого примера это полосы движения, пешеходный переход, стоп-линии, разделительная полоса, разметка между полосами движения). Далее сформировали пакет параметров инсталляции и настроек датчиков измерений физических величин и их взаимосвязей друг с другом, основываясь на сформированной модели. В рассматриваемом примере для обеспечения наилучшего обзора дорожной ситуации целесообразным является установка одного датчика измерений физических величин, а именно средства видеофиксации (видеокамеры) в непосредственной близости от края дорожного полотна на высоте 4,5-5,3 м над уровнем дороги на расстоянии 15-17 м от пешеходного перехода. Заявляемый способ предусматривает возможность определенного варьирования при инсталляции и настройке датчиков измерений физических величин, так как сформированный пакет параметров инсталляции и настроек содержит данные, указанные в виде диапазонов параметров. Поскольку в реальных условиях практически невозможно установить датчики измерений физических величин четко на предусмотренные пакетом параметров инсталляции и настроек места (по причине отсутствия опоры, отсутствия возможности ее установить на предусмотренном месте, либо по причине наличия датчиков измерений физических величин (в частности видеокамер), которые были установлены ранее и могут быть использованы при реализации заявляемого способа), для установки упомянутых датчиков измерений физических величин выбирают места, наиболее близкие к предусмотренным пакетом параметров инсталляции и настроек. В рассматриваемом примере видеокамера установлена на опоре уличного освещения на высоте 5,3 м над уровнем дороги на расстоянии 18 м от пешеходного перехода. После установки датчиков измерений физических величин (в рассматриваемом примере - видеокамеры) получили изображение заданного участка дороги с установленного средства видеофиксации. На полученном изображении, так же как и на сформированной модели, обозначили зоны и провели их привязку к соответствующим зонам на сформированной модели участка дороги. Регистрация нарушений ПДД по заявляемому способу регистрации нарушений ПДД для рассматриваемого примера происходит следующим образом: с помощью видеокамеры получают изображение заданного участка дороги с движущимися ТС. Каждому кадру полученного изображения при помощи средства формирования точного времени присваивают уникальную метку точного времени. Полученные данные передают в электронно-вычислительное устройство по имеющимся каналам связи, производят обработку данных о движении ТС и дорожной обстановке автоматическими программными средствами. С этой целью преобразуют данные, которые были получены от видеокамеры и сопоставлены с данными от средства формирования точного времени, в координаты трека перемещения ТС на сформированной модели участка дороги с учетом заранее определенных зон на модели участка дороги. Для построения трека используют набор последовательных точек траектории движения ТС (идентифицированного по распознанному государственному регистрационному номерному знаку), в котором каждой точке соответствует уникальный момент времени. Принятие решения о наличии нарушения ПДД конкретным ТС производится автоматическим программным средством, основанным на теории графов. В заявляемом способе регистрации нарушений ПДД-графа выявления нарушений ПДД. Вершинами графа выявления нарушений ПДД являются зоны, определенные на сформированной модели, а ребрами - разрешенные и запрещенные переходы между зонами (которые для рассматриваемого примера определены в зависимости от светофорного регулирования и ПДД на данном участке дороги). Далее, согласно предлагаемому способу, автоматическими программными средствами формируют пакеты доказательной базы, состоящие из видеокадров с распознанным государственным регистрационным номерным знаком ТС с присвоенными им метками точного времени, видеокадров, подтверждающих наличие факта нарушения ПДД, с присвоенными им метками точного времени и документа о составе нарушения ПДД. Количество и тип необходимых для формирования доказательной базы видеокадров определяется автоматическим программным средством в зависимости от вида идентифицированного нарушения ПДД и места расположения конкретного ТС в момент совершения нарушения ПДД. Сформированные пакеты доказательной базы отправляют на внешние приемники информации (для рассматриваемого примера - на пульт обработки информации о нарушениях ПДД). Одновременно сформированные пакеты доказательной базы попадают в архив доказательной базы, из которого могут быть затребованы через определенное время при необходимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОГО МОНИТОРИНГА ТРАНСПОРТНОГО ПОТОКА | 2014 |
|
RU2559862C1 |
| Система фото-, видеофиксации нарушений правил дорожного движения и способ её работы | 2018 |
|
RU2711825C2 |
| СПОСОБ РЕГИСТРАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2011 |
|
RU2480841C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| СПОСОБ РЕГИСТРАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2012 |
|
RU2493604C1 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| Способ контроля дорожного движения на участке дороги с выделенной полосой для маршрутного транспортного средства | 2016 |
|
RU2652292C1 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| Способ фиксации нарушений Правил дорожного движения | 2023 |
|
RU2806291C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
Изобретение относится к области контроля движения дорожного транспорта, а именно к способу регистрации нарушений правил дорожного движения. С помощью датчиков измерений физических величин получают изображение заданного участка дороги с движущимися транспортными средствами (ТС), передают данные в электронно-вычислительное устройство, производят обработку данных о движении ТС и дорожной обстановке, сравнивают полученные данные о движении ТС с допустимыми по правилам дорожного движения (ПДД) на данном участке дороги, производят автоматическую квалификацию и фиксацию нарушений ПДД и нештатных ситуаций с идентификацией конкретных нарушителей ПДД. Обработку данных о движении ТС и дорожной обстановке осуществляют путем преобразования сопоставленных данных, полученных от датчиков измерений физических величин, в координаты сформированной модели участка дороги. По фактам нарушения ПДД автоматическими программными средствами формируют пакеты доказательной базы и отправляют их на внешние приемники информации и одновременно передают в архив доказательной базы. Технический результат заключается в объективности получения информации о дорожной обстановке и повышении доказательной способности формируемой доказательной базы по нарушениям ПДД конкретным ТС. 12 з.п. ф-лы, 1 ил.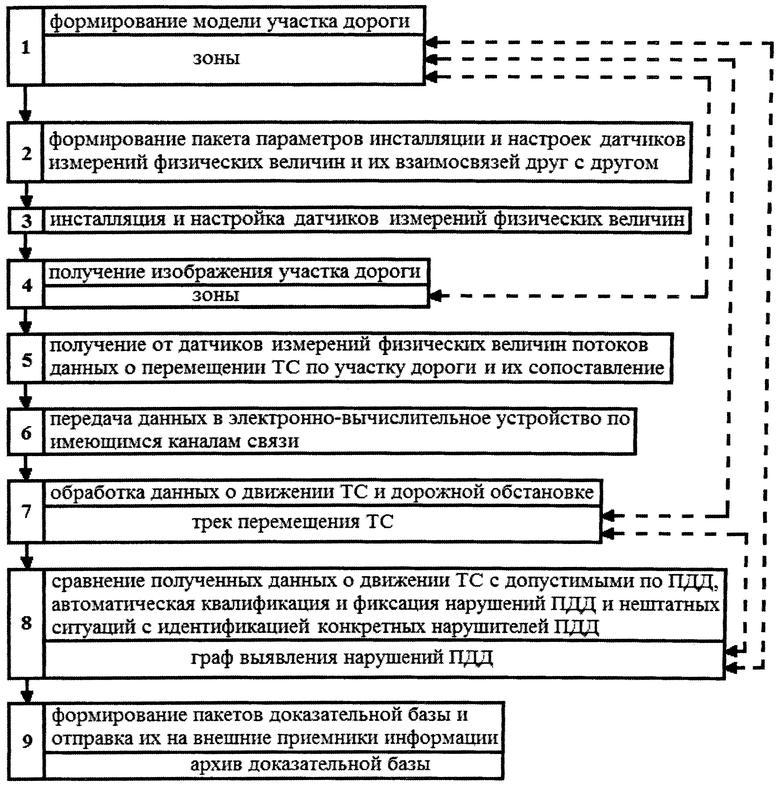
1. Способ регистрации нарушений правил дорожного движения, при котором с помощью датчиков измерений физических величин, включающих по крайней мере средства видеофиксации, получают изображение заданного участка дороги с движущимися транспортными средствами, передают данные в электронно-вычислительное устройство по имеющимся каналам связи, производят обработку данных о движении транспортных средств и дорожной обстановке автоматическими программными средствами, сравнивают полученные данные о движении транспортных средств с допустимыми по правилам дорожного движения на данном участке дороги, производят автоматическую квалификацию и фиксацию нарушений правил дорожного движения и нештатных ситуаций с идентификацией конкретных нарушителей правил дорожного движения, отличающийся тем, что в качестве датчика измерений физических величин дополнительно используют средство формирования точного времени, состоящее из приемника сигналов точного времени и модуля генерации постоянной частоты, при этом предварительно осуществляют формирование модели участка дороги, на котором будет осуществляться регистрация нарушений правил дорожного движения, основываясь на сформированной модели участка дороги формируют пакет параметров инсталляции и настроек упомянутых датчиков измерений физических величин и их взаимосвязей друг с другом, в соответствии с которым производят инсталляцию и настройку упомянутых датчиков, а обработку данных о движении транспортных средств и дорожной обстановке осуществляют путем преобразования данных, полученных от датчиков измерений физических величин, в координаты сформированной модели участка дороги, при этом автоматическую квалификацию и фиксацию нарушений правил дорожного движения и нештатных ситуаций проводят основываясь на теории графов.
2. Способ по п. 1, отличающийся тем, что при формировании модели участка дороги, на котором будет осуществляться регистрация нарушений правил дорожного движения, создают модель участка дороги, которая соответствует тому участку, на котором будет осуществляться регистрация нарушений правил дорожного движения, наносят всю соответствующую дорожную разметку, указывают разрешенные и запрещенные направления движения и перестроения, проводят проверку формируемой модели на наличие противоречий, задают светофорное регулирование, на сформированной модели определяют зоны - неделимые участки дороги с нанесенным на них определенным видом дорожной разметки.
3. Способ по п. 1, отличающийся тем, что формирование пакета параметров инсталляции и настроек упомянутых датчиков измерений физических величин и их взаимосвязей друг с другом проводят на основе данных, полученных при формировании модели участка дороги, на котором будет осуществляться регистрация нарушений правил дорожного движения в соответствии с данными, полученными от самих датчиков измерений физических величин.
4. Способ по п. 2, отличающийся тем, что на полученном с помощью датчиков измерений физических величин, включающих по крайней мере средства видеофиксации, изображении заданного участка дороги, на котором осуществляют регистрацию нарушений правил дорожного движения, также определяют зоны - неделимые участки дороги с нанесенным на них определенным видом дорожной разметки.
5. Способ по п. 4, отличающийся тем, что для зон, определенных на полученном с помощью датчиков измерений физических величин, включающих по крайней мере средства видеофиксации, изображении заданного участка дороги, на котором осуществляется регистрация нарушений правил дорожного движения, проводят привязку к соответствующим зонам на сформированной модели участка дороги.
6. Способ по п. 1, отличающийся тем, что данные, полученные от датчиков измерений физических величин, по меньшей мере от средства видеофиксации и средства формирования точного времени, сопоставляют.
7. Способ по п. 1, отличающийся тем, что обработку данных о движении транспортных средств и дорожной обстановке автоматическими программными средствами производят путем преобразования данных, полученных от датчиков измерений физических величин, в координаты трека перемещения транспортного средства на сформированной модели участка дороги с учетом заранее определенных зон на модели участка дороги.
8. Способ по п. 7, отличающийся тем, что в качестве трека используют набор последовательных точек траектории движения транспортного средства, в котором каждой точке соответствует уникальный момент времени.
9. Способ по п. 1, отличающийся тем, что автоматическую квалификацию и фиксацию нарушений правил дорожного движения и нештатных ситуаций проводят используя граф выявления нарушений правил дорожного движения, причем вершинами графа являются зоны, определенные на сформированной модели, а ребрами - разрешенные и запрещенные переходы между зонами.
10. Способ по пп. 7 или 9, отличающийся тем, что идентификацию конкретных нарушителей правил дорожного движения производят по распознанному государственному регистрационному номерному знаку транспортного средства.
11. Способ по п. 1, отличающийся тем, что после автоматической квалификации и фиксации нарушений правил дорожного движения формируют пакеты доказательной базы, состоящие из видеокадров с запечатленным на них транспортным средством с распознанным государственным регистрационным номерным знаком с присвоенными им метками точного времени, видеокадров, подтверждающих наличие факта нарушения правил дорожного движения данным транспортным средством с присвоенными им метками точного времени, документа о составе нарушения правил дорожного движения и отправляют сформированные пакеты доказательной базы на внешние приемники информации.
12. Способ по п. 11, отличающийся тем, что сформированные пакеты доказательной базы передают в архив доказательной базы для обеспечения возможности затребования через определенное время при необходимости.
13. Способ по п. 1, отличающийся тем, что в качестве датчиков измерений физических величин используют средства радиолокации и/или средства считывания сигналов управления светофором.
| СПОСОБ РЕГИСТРАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2012 |
|
RU2493604C1 |
| Газовая горелка для водоподогревателей проточного типа | 1956 |
|
SU113398A1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕКОМЕНДУЕМЫХ МАРШРУТОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2011 |
|
RU2459259C1 |
| US 6385539 B1, 07.05.2002 | |||
| US 2013197790 A1, 01.08.2013. | |||

