Настоящее изобретение относится к устройству, включающему блок безопасности и исполнительную систему его привода, для оборудования грузоподъемного механизма, в частности лебедки.
Как правило, грузовую лебедку оснащают устройством безопасности, включающим зубчатое колесо, расклиненное на валу ворота, входящее в зацепление с червячным механизмом, подвижно закрепленным в картере, приводимым электродвигателем так называемой "следящей системы" таким образом, что червяк "следует" оборотам зубчатого колеса при нормальной работе лебедки, и средства торможения червяка в картере при аварийной ситуации и отказе подъемного механизма. Такое устройство безопасности, известное под маркой "Motosuiveur", описано в патенте ЕР 1253102.
При исправной работе лебедки червяк в нормальном положении опирается на указанные средства торможения, и двигатель следящей системы вращает червяк с частотой, соответствующей частоте вращения зубчатого колеса, которое в свою очередь вращает ворот лебедки, при этом устройство безопасности находится в неактивном состоянии "наблюдения", не препятствуя функционированию лебедки.
В случае выхода лебедки из строя ее вал сразу же получает ускорение под действием массы груза, которое передается зубчатому колесу устройства безопасности и за которым не может следовать червяк, это приводит к сдвигу червяка в картере из его нормального положения в сторону крайнего положения, за счет чего он оказывает нарастающее усилие на средства торможения, при достижении максимума демпфирующей способности которых переходит в крайнее положение останова.
По одному из конструктивных решений в такое средство торможения входят поршень с упором в червяк, штуцеры малого сечения, через которые поршень нагнетает масло, омывающее червяк, между концами которого установлены пружинные шайбы, в результате чего торможение выполняется корпусом картера. Подобное средство торможения описано в патенте US 7,331,252.
Вышеупомянутое устройство безопасности позволяет контролировать описанную аварийную ситуацию за счет блокировки груза и предотвращения его падения.
После разблокировки необходимо восстановить управление грузом, чтобы освободить лебедку, для чего требуется доступ к устройству безопасности для ручного вращения червячного механизма, поскольку мощность электродвигателя следящей системы не рассчитана на вращение червяка (он для этого не предназначен).
Однако в определенных ситуациях такой доступ невозможен или ограничен, например, при эксплуатации лебедки в атомной промышленности. Более того, приведение в действие червяка вручную - операция трудоемкая и малоэффективная, поскольку шаг червяка относительно мал, а диаметр зубчатого колеса относительно велик.
Задачей настоящего изобретения является преодоление этих существенных практических недостатков.
Другой крайней ситуацией является та, при которой лебедка останавливается из-за неожиданного срабатывания тормозной системы, блокирующей вал ворота, например, при отключении электропитания. В такой ситуации не просто сразу восстановить управление грузом без ручного вмешательства.
Предлагаемое изобретение также нацелено на заполнение этого пробела.
Блок, представленный в изобретении, включает названное выше устройство безопасности "Motosuiveur", т.е. зубчатое колесо, расклиненное на валу грузоподъемного ворота, входящее в зацепление с червячным механизмом, скользяще подвижно закрепленным в картере, приводимым электродвигателем так называемой "следящей системы" таким образом, что червяк "следует" за частотой оборотов зубчатого колеса при нормальной работе лебедки, и средства торможения червяка в картере при его сдвиге в крайнее положение до полной остановки при аварийной ситуации и отказе лебедки.
В указанный блок в соответствии с изобретением также входят:
- шлицевый вал, выполненный заодно с одним из концов червяка и продолжающий его по продольной оси;
- фасонная втулка с внутренними и наружными пазами и гребнями, соединенная продольным зацеплением со шлицевым валом и вращающаяся вместе с ним;
- пружинный элемент, один конец которого соединен с ограничителем хода, жестко закрепленным на шлицевом валу, а другой конец которого соединен с фасонной втулкой;
- колесо привода со шлицевой ступицей, в которую фасонная втулка может входить для зацепления и вращения через посредство своих наружных гребней;
- электродвигатель, называемый "вспомогательным", с возможностью вращения приводного колеса,
при этом фасонная втулка выполнена с возможностью перемещения вместе со шлицевым валом между нормальным положением, в котором она не входит в зацепление с приводным колесом при исправной работе грузоподъемного механизм, и крайним положением, в которое она переходит при возникновении неисправности в работе грузоподъемника, когда она входит в зацепление с вращающимся приводным колесом, вращение от которого передает на шлицевый вал и через него на червяк.
При штатной работе блока безопасности фасонная втулка находится в расцепленном положении, а исполнительная система, включающая вспомогательный электродвигатель и приводное колесо, - в неактивном состоянии.
В ситуации отказа грузоподъемного механизма червяк сдвигается в крайнее положение стопорения, блокирующего груз от падения, при этом происходит сжатие пружинного элемента, прижимающего фасонную втулку к приводному колесу. Затем, вспомогательный электродвигатель на малых оборотах вращает приводное колесо так, чтобы его шлицы совпали и вошли в зацепление с пазами фасонной втулки. За счет этого создается возможность передачи вращающего усилия от вспомогательного электродвигателя через червячный механизм на приводное колесо для перемещения груза вверх или вниз. Когда масса груза перестает воздействовать на трос грузоподъемника, червяк возвращается в нормальное положение, сдвигая фасонную втулку назад в расцепленное состояние.
В силу сказанного изобретение обеспечивает систему приведения в действие устройства безопасности достаточной мощности для вращения червячного механизма в ситуации отказа лебедки, исключая необходимость ручного доступа и привода червяка.
При блокировке вала грузоподъемника, в частности после автоматического натяжения тормозного механизма, которым оснащен такой подъемник, может быть задействован электродвигатель следящей системы для вращения червяка и переведения его в вышеуказанное крайнее положение с активацией средств торможения и последующим стопорением. Аналогично тому, как описано выше, при этом перемещении фасонная втулка прижимается к приводному колесу с последующим медленным вращением приводного колеса посредством вспомогательного электродвигателя и введением фасонной втулки в положение зацепления с ним. Вспомогательный электродвигатель позволяет вращать червяк в направлении, предотвращающем его сдвиг в указанное выше крайнее положение, благодаря чему зубчатое колесо может быть приведено в движение таким образом, чтобы преодолеть силу трения тормозного механизма грузоподъемника.
Преимуществом предложенной исполнительной системы является то, что в ней предусмотрены средства фиксации фасонной втулки в зацеплении.
Эти средства фиксации позволяют сохранять фасонную втулку в положении зацепления, несмотря на описанное вращение червяка вспомогательным электродвигателем в направлении, предотвращающем его сдвиг в крайнее положение и перемещающем его в противоположное стопорное положение. Таким образом сохраняется возможность приведения в действие червяка с использованием вспомогательного электродвигателя.
В предпочтительном варианте реализации этих средств блокировки:
- ширина пазов [ступицы] приводного колеса превышает ширину входящих в эти пазы гребней фасонной втулки, боковые стороны гребней которой в зависимости от направления вращения приводного колеса входят в контакт с боковой поверхностью пазов приводного колеса с одной стороны или с другой, противоположной, стороны;
- каждый гребень фасонной втулки имеет [клиновидное] расширение переднего сегмента, образующее плечики, посредством которых эти передние сегменты проскальзывают сквозь [ступицу] приводного колеса, приводя фасонную втулку в фиксируемое зацепление с упором в приводное колесо под действием упругой силы пружинного элемента при вращении приводного колеса в направлении перемещения червяка из крайнего положения в противоположное положение стопорения.
При вращении приводного колеса в противоположном направлении эти передние сегменты выходят из пазов [ступицы] приводного колеса, высвобождая фасонную втулку из зацепления.
Преимуществом такой конструкции является более узкая фронтальная часть [клиновидного сегмента], способствующая лучшему вхождению [фасонной втулки] в пазы [ступицы] приводного колеса для зацепления.
Предпочтительная компоновка исполнительной системы включает, кроме названного, контактные датчики, один из которых определяет переход червяка в указанное крайнее положение, а второй определяет нахождение фасонной втулки в одном из положений - зацепления или расцепления.
Другие существенные признаки и преимущества изобретения будут раскрыты далее в описании со ссылкой на прилагаемые фигуры, где представлен неограничительный вариант возможной реализации блока безопасности/исполнительной системы.
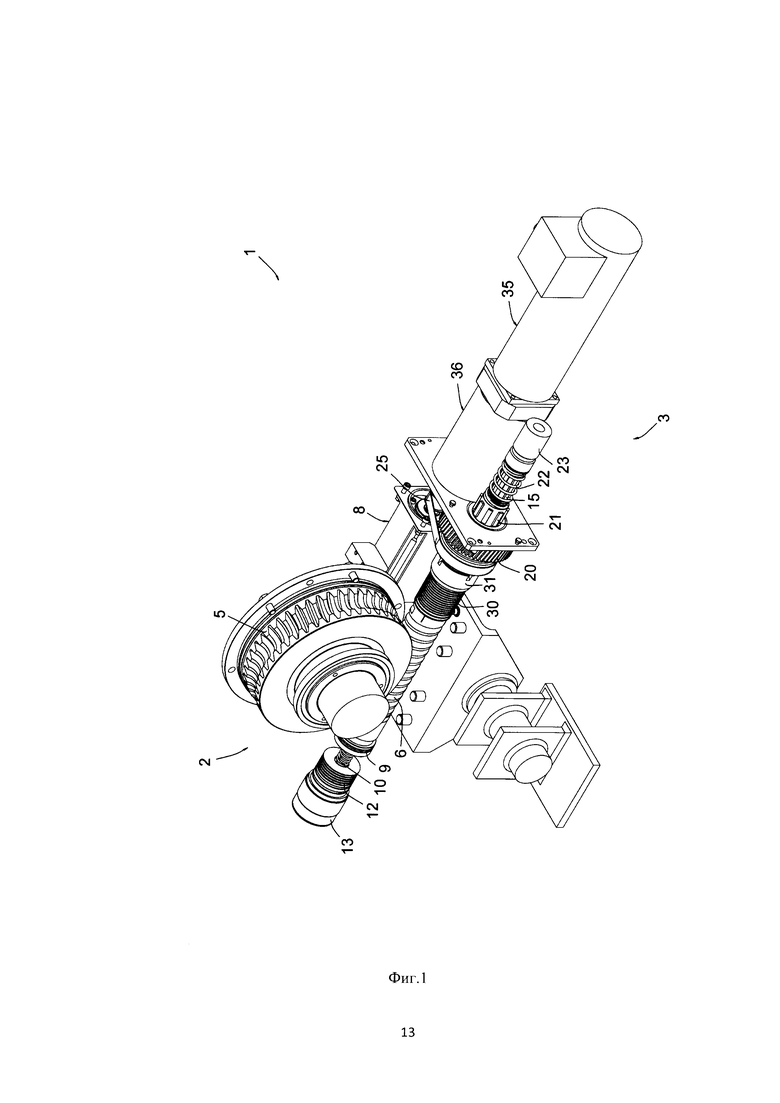
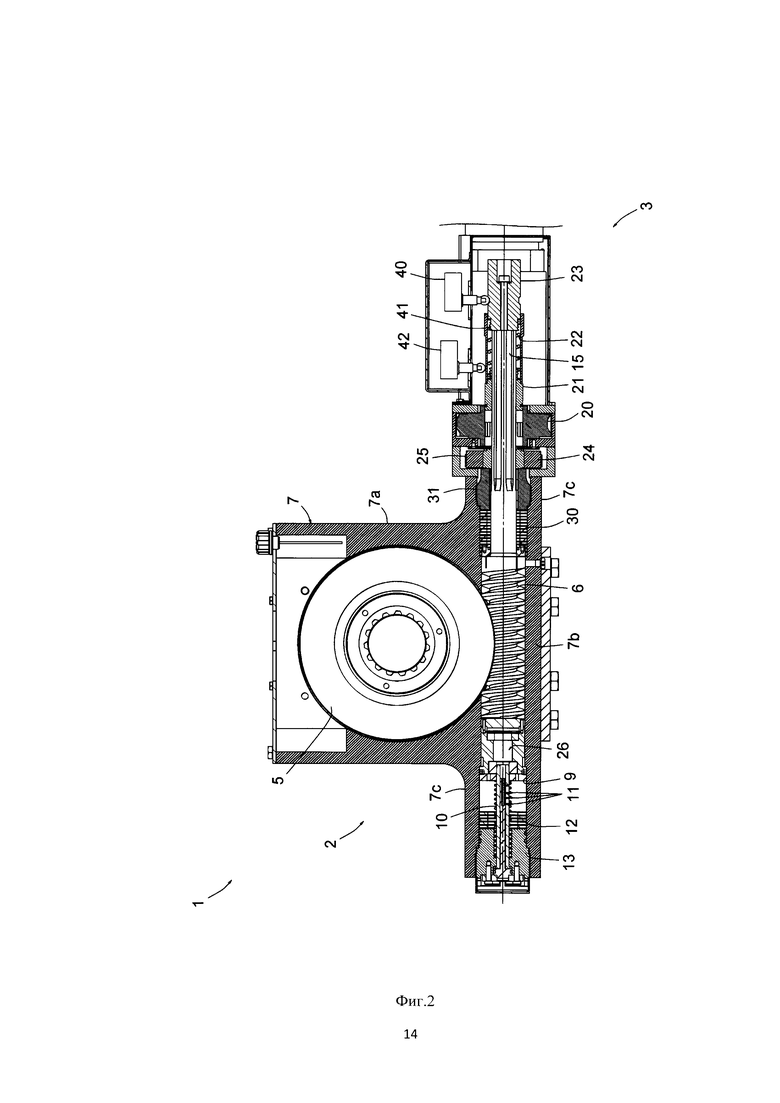
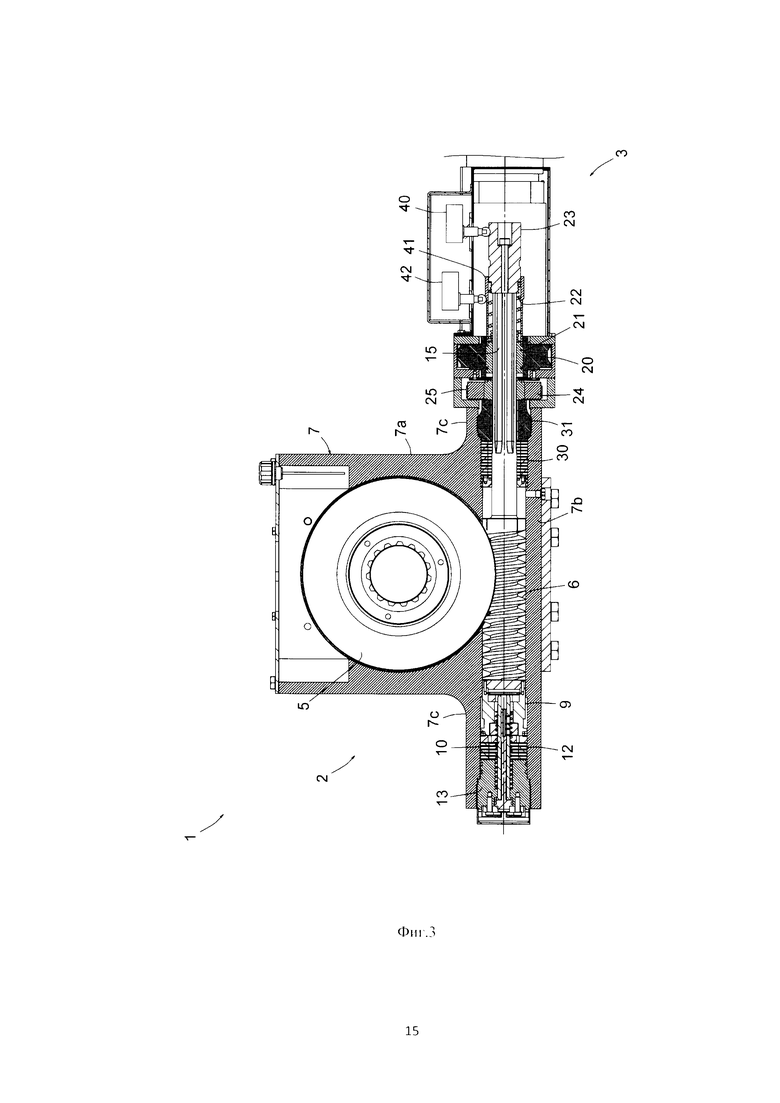
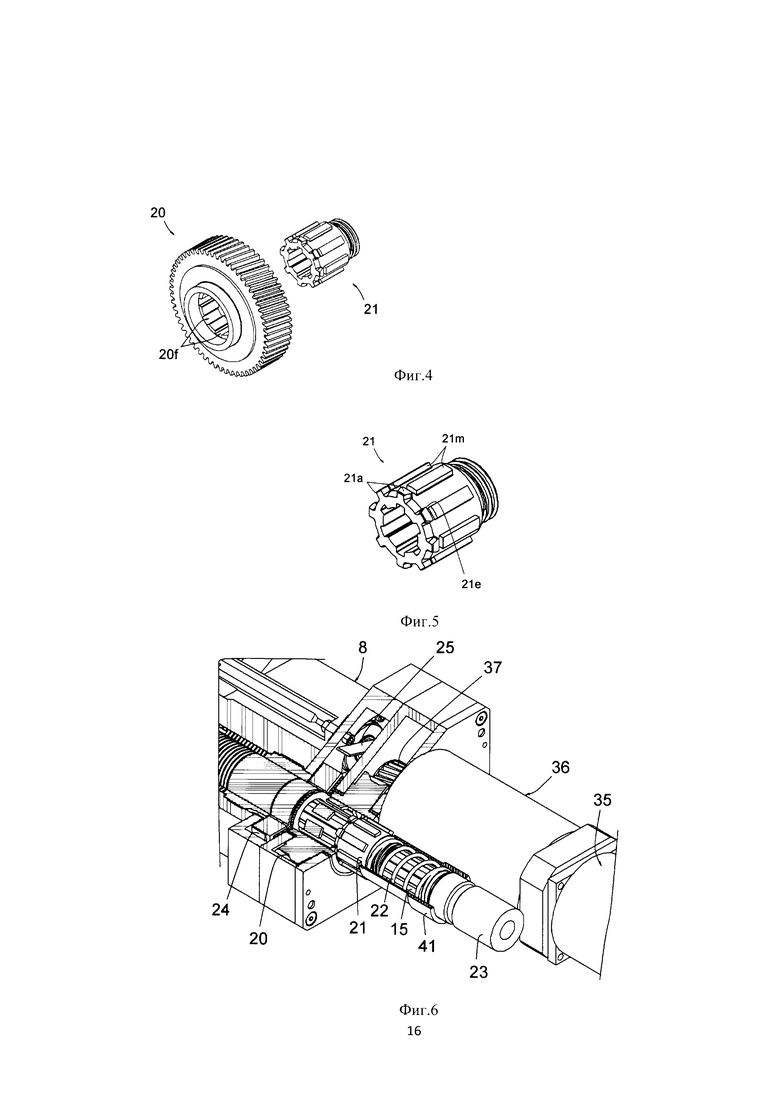
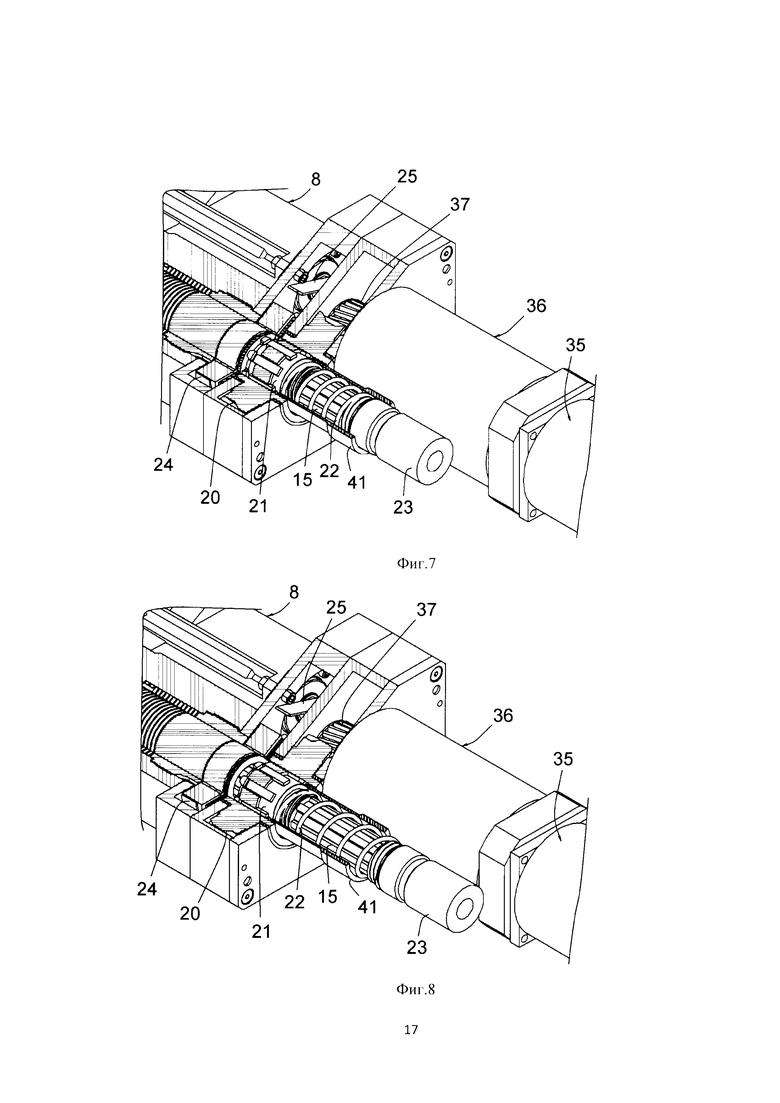
На фигуре 1 представлен вид устройства в перспективе без картера и без детализации модуля контакторов; на фигуре 2 дан полный вид сбоку устройства, в составе которого червячный механизм находится в нормальном рабочем положении и фасонная втулка - в расцепленном состоянии; на фигуре 3 дан вид, подобный фигуре 2, устройства, в составе которого червячный механизм находится в крайнем положении и фасонная втулка - в зацеплении; на фигуре 4 дан вид в перспективе фасонной втулки и приводного колеса, с которым данная втулка входит в зацепление при вращении; на фигуре 5 дан увеличенный вид в перспективе фасонной втулки, показанной на фигуре 4; на фигуре 6 дан вид в перспективе фрагмента описываемого блока с частичным сечением, где показана фасонная втулка в расцепленном состоянии; на фигуре 7 дан вид, подобный фигуре 6, но фасонная втулка здесь находится в зацеплении; и на фигуре 8 дан вид, подобный фигуре 7, где фасонная втулка находится в зацеплении с фиксацией. На фигурах 1-3 представлено устройство 1 в комплекте с блоком безопасности 2 для оснащения грузоподъемного механизма, в частности лебедки, и исполнительной системой 3, приводящей в действие блок 2.
Тип устройства безопасности 2 известен под маркой "Motorsuiveur", принцип действия которого описан в патенте ЕР 1253102. Это устройство включает зубчатое колесо 5, расклиненное на валу грузоподъемного ворота (не показан), входящее в зацепление с червяком 6, продольно-скользяще установленным в картере 7, электродвигатель 8 так называемой "следящей системы", через вращение червяка 6 "сопровождающей" вращение зубчатого колеса 5 при нормальной работе грузоподъемного механизма, и средства 9-13 демпфирования продольного сдвига червяка 6 в картере 7 в сторону крайнего положения до полной блокировки в случае отказа грузоподъемного механизма.
С одной стороны, от колеса 5 червяк 6 имеет продольноосевое продолжение в виде выполненного заодно с ним шлицевого вала 15. На шлицевом валу 15 последовательно размещены приводное колесо 20, фасонная втулка зацепления 21, пружина 22 и стопор 23, являющиеся компонентами исполнительной системы 3, описанной ниже.
Как показано на фигурах 2 и 3, картер 7 образован центральным верхним отсеком 7а, имеющим канал для установки зубчатого колеса 5 в сборе, центральным нижним отсеком, имеющим канал для установки червячного механизма 6 в сборе, и двумя продольными отсеками 7с, имеющими внутри них продолжение этого канала, при этом в одном из них размещены названные выше средства торможения 9-13 червяка 6.
Параллельно центральному нижнему отсеку картера 7b расположен электродвигатель 8 следящей системы, приводящий в движение червяк 6 через посредство колеса 24 и ремня 25.
В иллюстрируемом на фигурах 2 и 3 примере масса груза, поднимаемого грузоподъемным механизмом, оказывает на зубчатое колесо 5 вращательное усилие по часовой стрелке, в силу чего при отказе грузоподъемного механизма червяк 6 движется справа налево. Средства торможения 9-13 при такой компоновке расположены в левом отсеке 7с картера блока безопасности 2.
Средства торможения включают поршень 9, упирающийся в червяк 6, патрубок 10 со штуцерами 11 малого сечения в его стенках, пружинные шайбы 12, прилегающие к стопору 13, жестко зафиксированному в картере 7.
Поршень 9 образует внутреннюю камеру 26, сообщающуюся с патрубком 10. При выходе из строя грузоподъемника червяк 6 давит на поршень 9, который нагнетает масло, находящееся между ним и шайбами 12, через штуцеры 11 внутрь камеры 26 (ср. фигуры 2 и 3). Штуцеры 11, выполненные вдоль патрубка 10, постепенно закрываются поршнем 9, перемещающимся при сдвиге червяка 6, за счет чего участок маслопроводного канала постепенно укорачивается, и возрастает демпфирующее усилие. Если поршень 9, пройдя последний штуцер, продолжает сдвигаться, он упирается в шайбы 12, сжимая их до возможного предела, который определяет стопорное положение червяка 6 в картере 7.
В противоположном отсеке картера 7с (т.е. справа на фигурах 2 и 3) установлены ряд шайб 30 и стопор 31, аналогичные описанным выше шайбам 12 и стопору 13, обеспечивающие демпфирование движения червяка 6 слева направо в определенных ситуациях, описанных ниже.
Сбоку, отдельно от приводного колеса 20, фасонной втулки зацепления 21, пружины 22 и стопора 23, расположена исполнительная система 3, включающая электродвигатель 35, называемый "вспомогательным электродвигателем", который приводит в действие редуктор 36.
Приводное колесо 20 входит в зацепление с шестерней 37 (фигура 6) на выходе редуктора 36 и, соответственно, имеет привод от электродвигателя 35. Как детализовано на фигуре 4, это колесо имеет шлицованную ступицу, входящую в зацепление с наружными гребнями и пазами фасонной втулки 21.
Эта деталь, показанная на фигурах 4 и 5, имеет внутренние шлицы, продольно входящие в зацепление, надвигаясь на вращающийся шлицевый вал 15 и упомянутые выше наружные гребни, входящие в зацепление с приводным колесом 20. Фасонная втулка 21 может перемещаться вместе со шлицевым валом 15 и, соответственно, с червяком 6 между нормальным, расцепленным с приводным колесом 20, положением при штатном режиме работы грузоподъемника (ср. фигуры 2 и 6) и крайним положением при внештатной ситуации в работе грузоподъемника, когда она входит в зацепление с вращающимся приводным колесом 20 и начинает передавать вращение от приводного колеса 20 через шлицевый вал 15 на червяк 6 (ср. фигуры 3 и 7).
Кроме того,
- пазы 20f ступицы приводного колеса 20 имеют ширину, превышающую ширину наружных гребней 21m фасонной втулки 21, при этом боковые поверхности 21с указанных наружных гребней [21m] в зависимости от направления движения приводного колеса 20 относительно вала 15 соприкасаются с первыми боковыми поверхностями пазов 20f или со вторыми, противоположными первым, боковыми поверхностями пазов 20f;
- в передней части каждого наружного гребня 21m расположен сегмент 21а, имеющий расширяющиеся плечики 21е, выступающие за границы каждой боковой поверхности каждого гребня 21m.
Как показано на фигуре 5, боковые стороны каждого расширяющегося переднего сегмента 21а клиновидно сближаются в направлении переднего торца фасонной втулки 21, что способствует лучшему вхождению сегментов 21а в пазы 20f для зацепления.
На фигурах 6-8 видно, что эти клиновидные фронтальные сегменты 21а легко проходят сквозь ступицу колеса 20 в описанном зацепленном состоянии; при вращении приводного колеса 20 в направлении, перемещающем червяк 6 слева направо согласно фигурам 2 и 3 (то есть против часовой стрелки, как видно на фигурах 6-8) в сторону стопорения червяка 6 упором в шайбы 30, описанные клиновидные сегменты 21а проскальзывают сквозь пазы 20f и опираются на приводное колесо 20, фиксируя таким образом пазовую втулку 21 в указанном зацепленном положении (ср. фиг. 8). В результате эти выступающие в стороны плечики 21е в соединении с приводным колесом 20 образуют средство фиксации фасонной втулки 21 в указанном зацепленном положении.
Вдоль вала 15, окружая его, проходит пружина 22 между фасонной втулкой 21, с которой она соединена одним концом, и стопором 23, с которым она соединена другим концом.
На фигурах 1, 2 и 6 эта пружина 22 показана в расслабленном состоянии, определяющем расцепленное положение пазовой втулки 21. При перемещении червяка 6 справа налево до соприкосновения с шайбами 12 стопор 23 движется вместе с валом 15, сжимая пружину 22 и сдвигая пазовую втулку 21 до зацепления со ступицей приводного колеса 20.
В дополнение к этому, согласно фигурам 2, 3, и 6-8, система привода 3 включает:
- модуль датчика положения блока "червяк 6 - вал 15 - стопор 23", в который входят канавка вдоль вершины стопора 23 и контактный датчик 40, щуп которого при движении вдоль канавки радиальным перемещением определяет свое нахождение в ее пределах; и
- модуль датчика положения зацепления фасонной втулки 21, в который входят гильза с манжетой 41, защищающая пружину 22 и соединенная с пазовой втулкой 21, и контактный датчик 42, щуп которого, двигаясь поверх гильзы с манжетой, радиальным перемещением определяет свое нахождение относительно плеча на стыке указанной гильзы с манжетой.
При нормальной работе блока безопасности 2 фасонная втулка 21 находится в расцепленном положении, а исполнительная система 3 - в состоянии ожидания (ср. фигуры 2 и 6).
При возникновении неисправности грузоподъемного механизма червяк 6 перемещается в крайнее положение, упираясь в шайбы 12, блокируя груз от падения, при этом сжимается пружина 22, прижимая фасонную втулку 21 к ступице приводного колеса 20. Затем, вспомогательный электродвигатель 35 на малых оборотах вращает приводное колесо 20 до совпадения и взаимного зацепления его пазов 20f с фронтальными сегментами 21а шлицев 21m [фасонной втулки]. В результате этого создается возможность передачи вращающего усилия от вспомогательного электродвигателя 35 через червячный механизм 6 на приводное колесо 20 для перемещения груза вверх или вниз.
После блокировки зубчатого колеса 5 и, в особенности, после прекращения действия массы груза на блок безопасности, червяк 6, вращаясь, возвращается в нормальное положение. При винтовом вращении червяка 6 относительно зубчатого колеса 5 (когда приводное колесо 20 вращается по часовой стрелке) фронтальные сегменты 21а шлицев 21m попадают в просветы пазов 20f, и фасонная втулка 21 возвратным усилием пружины 22 перемещается в расцепленное положение; при обратновинтовом вращении червяка 6 относительно зубчатого колеса 5 (когда приводное колесо 20 вращается против часовой стрелки) фронтальные сегменты 21а шлицев 21m смещаются под углом относительно пазов 20f, упираясь плечиками 21е в приводное колесо 20, и пружина 22 остается в натяженном состоянии; медленным вращением приводного колеса 20 по часовой стрелке с помощью вспомогательного электродвигателя 35 пазы 20f могут быть совмещены с фронтальными сегментами 21а шлицев 21, в результате чего плечики 21е освобождаются от упора в приводное колесо 20, и фасонная втулка 21 под возвратным действием пружины 22 перемещается в расцепленное положение.
При блокировке вала подъемника, в частности встроенным в него автоматическим тормозным механизмом, срабатывает электродвигатель следящей системы, вращая червяк 6 в направлении ввинчивания относительно зубчатого колеса 5. В силу того, что зубчатое колесо 5 заблокировано и неподвижно, вращающийся червяк 6 перемещается до упора в шайбы 12 и стопорится. Как описано ранее, в результате этого перемещения фасонная втулка 21 входит в соприкосновение с приводным колесом 20, вращением которого посредством вспомогательного электродвигателя 35 на малых оборотах фасонная втулка 21 входит в зацепление. Далее предусмотрена возможность с помощью вспомогательного электродвигателя 35 путем вращения червяка 6 в направлении ввинчивания относительно зубчатого колеса 5 (когда колесо 20 вращается по часовой стрелке) вращать это зубчатое колесо 5, преодолевая силу трения тормоза грузоподъемника, для опускания груза.
При необходимости подъема груза червяк 6 вращают вспомогательным электродвигателем 35 в направлении вывинчивания относительно зубчатого колеса 5 (когда колесо 20 вращается против часовой стрелки), что переводит червяк 6 в положение останова упором в шайбы 30; на начало этого перемещения червяка 6 плечики 21е упираются в приводное колесо 20, удерживая фасонную втулку 21 в фиксированном положении зацепления. После возобновления контроля над грузом приводное колесо 20 вращают по часовой стрелке до совпадения пазов 20f с фронтальными сегментами 21а шлицев 21m, высвобождая таким образом фасонную втулку 21 для возврата в расцепленное положение.
Как следует из предшествующего описания, изобретением предложено устройство, включающее блок безопасности 2 "Motosuiveur®" и приводящую его в действие исполнительную систему 3, характеризующееся следующими преимуществами:
- мощностью привода исполнительной системы 3, достаточной для вращения червячного механизма 6 при отказе грузоподъемного устройства, что освобождает от необходимости доступа и приведения в действие червячного механизма вручную;
- возможностью сохранения управляемости груза в случае неисправности грузоподъемника, в частности при блокировке его вала встроенной тормозной системой, с помощью предлагаемого устройства и перемещения груза вверх или вниз без ручного вмешательства в блок безопасности или грузоподъемный механизм 1.
Изобретение описано на основе одного из вариантов конструктивных решений. Оно, безусловно, не ограничено этим вариантом исполнения, а наоборот, распространяется на все другие технические решения, соответствующие прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Движитель плавающего автомобиля | 1988 |
|
SU1782777A1 |
| ОПОРНОЕ УСТРОЙСТВО ЦИЛИНДРИЧЕСКОГО ТЕЛА | 2006 |
|
RU2401203C2 |
| РУЧНАЯ БОРТОВАЯ ТАЛЬ | 1991 |
|
RU2016836C1 |
| Лебедка черничкина | 1977 |
|
SU727557A1 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| СТРЕЛОВОЙ КРАН | 1993 |
|
RU2097307C1 |
| КОНВЕЙЕР С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ТЯГОВОГО ОРГАНА | 1996 |
|
RU2108278C1 |
| ХОЛОДИЛЬНЫЙ АППАРАТ С РЕГУЛИРУЕМОЙ ПО ВЫСОТЕ ПОЛКОЙ ДЛЯ ОХЛАЖДАЕМЫХ ПРОДУКТОВ | 2008 |
|
RU2488051C2 |
| ХОБОТ ФРЕЗЕРНОГО СТАНКА | 1970 |
|
SU275350A1 |
Изобретение относится к блоку безопасности с приводящей его исполнительной системой для лебедки. Блок безопасности включает зубчатое колесо (5), жестко зафиксированное на валу грузоподъемного ворота, и входящий с ним в зацепление червячный механизм (6). Блок безопасности включает также шлицевый вал (15), жестко соединенный с одним из концов червяка (6), фасонную втулку (21) с внутренними и наружными гребнями и пазами, закрепленными на шлицевом валу (15), пружинный элемент (22) между фасонной втулкой (21) и стопором (23), приводное колесо (20) со шлицованной ступицей, входящее в зацепление с фасонной втулкой (21), вспомогательный электродвигатель (35). Достигается упрощение управлением лебедки. 4 з.п. ф-лы, 8 ил.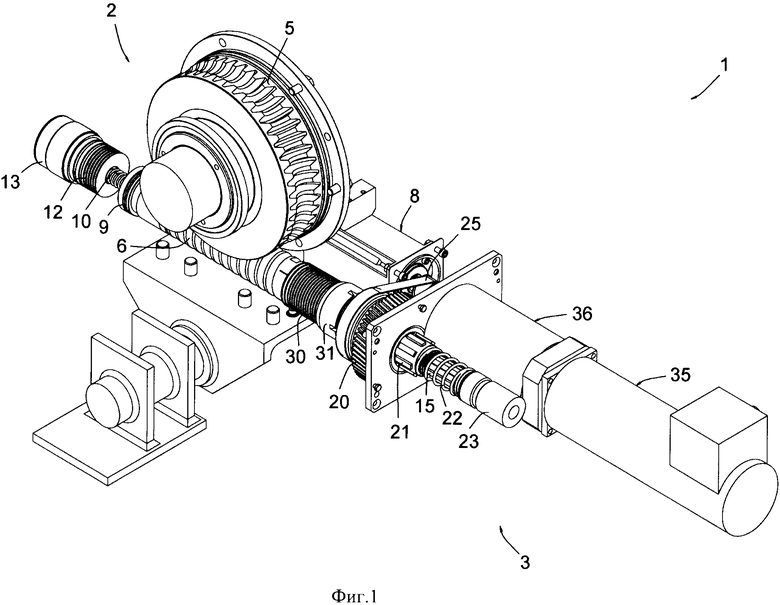
1. Блок безопасности подъемника (1), включающий блок (2) и исполнительную систему (3), приводящую в действие этот блок безопасности, для оснащения грузоподъемного механизма типа лебедки, где блок безопасности (2), включающий зубчатое колесо (5), расклиненное на валу ворота грузоподъемника, входящее в зацепление с червячным механизмом (6), продольно подвижно установленным в картере (7), вращаемым электродвигателем (8) "следящей системы" таким образом, что червяк (6) следует вращению зубчатого колеса (5) при нормальной работе грузоподъемного механизма, и средства (9-13) демпфирования продольного сдвига червяка (6) в картере (7) в сторону крайнего положения до полной блокировки в случае отказа грузоподъемного механизма;
характеризующийся тем, что в него также включены (1):
- шлицевый вал (15), выполненный заодно с одним из концов червяка (6) и продолжающий его по продольной оси;
- фасонная втулка (21) с внутренними и наружными пазами и гребнями, соединенная продольно-скользящим зацеплением со шлицевым валом (15) и вращающаяся вместе с ним;
- пружинный элемент (22), один конец которого соединен со стопором (23), жестко закрепленным на шлицевом валу (15), а другой конец которого соединен с фасонной втулкой (21);
- приводное колесо (20) со шлицевой ступицей, в которую фасонная втулка (21) может входить для зацепления и вращения посредством своих наружных гребней;
- электродвигатель (35), называемый "вспомогательным", с возможностью вращения приводного колеса (20),
при этом фасонная втулка (21) выполнена с возможностью перемещения вместе со шлицевым валом (15) между нормальным положением, в котором она не входит в зацепление с приводным колесом (20) при исправной работе грузоподъемника, и крайним положением, в которое она переходит при возникновении неисправности в работе грузоподъемника, когда она входит в зацепление с вращающимся приводным колесом (20) для передачи вращения от него через шлицевый вал (15) на червяк (6).
2. Блок безопасности подъемника (1) по п.1, характеризующийся тем, что исполнительная система (3) включает средства (21е, 20) фиксации фасонной втулки (21) в положении зацепления.
3. Блок безопасности подъемника (1) по п.2, характеризующийся тем, что:
- ширина пазов (20f) приводного колеса (20) превышает ширину входящих в эти пазы гребней (21m) фасонной втулки (21), боковые стороны гребней (21m) которой в зависимости от направления вращения приводного колеса (20) входят в контакт с боковой поверхностью пазов (20f) приводного колеса с одной стороны или с другой, противоположной, стороны;
- каждый гребень (21m) фасонной втулки (21) имеет расширение переднего сегмента (21а) с образованием плечиков (21е), посредством которых эти передние сегменты (21а) проходят сквозь приводное колесо (20), приводя фасонную втулку (21) в фиксируемое зацепление с упором в приводное колесо (20) под действием упругой силы пружинного элемента (22) при вращении приводного колеса (20) в направлении перемещения червяка (6) из крайнего положения в противоположное положение стопорения.
4. Блок безопасности подъемника (1) по п.3, характеризующийся тем, что расширяющиеся передние сегменты (21е) имеют более узкие фронтальные торцы.
5. Блок безопасности подъемника (1) по любому из пп. 1-4, характеризующийся тем, что исполнительная система (3) включает также контактные датчики (40, 42), один из которых определяет нахождение червяка (6) в описанном крайнем положении и второй из которых определяет нахождение фасонной втулки (21) в описанном положении зацепления или в описанном положении расцепления.
| EP 1253102 A1, 30.10.2002;DE 3400406 A1, 18.07.1985;SU 240220 A1, 21.03.1969 | |||
| ПРОТИВОЗАТАСКИВАТЕЛЬ | 2000 |
|
RU2185318C2 |

