Изобретение относится к электрическому транспорту с асинхронными тяговыми двигателями (электровозы, тепловозы и моторные вагоны рельсового транспорта, электромобили и т.д.), а точнее к способам включения двигателей этих транспортных средств при движении их на выбеге.
Известен способ повторного включения асинхронных тяговых двигателей после кратковременного отключения электропитания, например защитой электровоза или тяговой подстанции, заключающийся в запоминании частоты питания двигателей на момент отключения электропитания с последующим включением его при формировании напряжения с этой же частотой [Ротанов Н.А., Курбасов А.С. и др. ЭПС с асинхронными тяговыми двигателями. - М.: Транспорт. - 1991. - 336 с.].
Недостаток этого способа связан с его ограниченной применимостью, поскольку за время отключения электропитания скорость поезда и соответственно частота вращения двигателей не должны существенно измениться.
Этот недостаток частично устранен в электроприводе при питании от контактной сети, в котором при перерыве электропитания через токоприемник электропитание обеспечивают от конденсатора большой емкости, имеющегося во входном фильтре электровоза [Мацумото Такео. Устройство управления для транспортного средства с электрическим двигателем переменного тока. Патент РФ №2479447, класс B60L 9/24, 25.03.2009 (Мицубиси Электрик Ко.)].
Недостаток этого способа - требуется конденсатор большой емкости.
Оба рассмотренных способа применимы при кратковременном перерыве электропитания. Но режимы управления движением поезда связаны с переходом на выбег длительностью до нескольких минут.
Возможность повторного включения асинхронных двигателей после выбега обеспечивается в патенте [Мещеряков В.Н. и др. Способ управления электроприводом переменного тока. Патент РФ №2456742, класс Н02Р 25/02, 14.04.2011], который можно рассматривать как прототип заявляемого изобретения. В нем рассмотрен способ повторного включения асинхронных тяговых двигателей электротранспортного средства на выбеге, заключающийся в том, что задают режим тяги или торможения и начальные значения частоты и напряжения электропитания двигателей, а потом эти значения корректируют, устанавливая требуемый вращающий момент.
Недостаток прототипа связан с тем, что начальное значение частоты электропитания задают на основе замера скорости вращения двигателя, причем этот замер необходимо выполнять для каждого двигателя; соответствующие датчики имеют погрешность 4-5%, что превышает номинальное скольжение тягового асинхронного двигателя, например двигателя НТА-1200 [Иньков Ю.М., Фельдман Ю.И. ред. ЭПС с электрическим торможением. М.: УМЦ ЖДТ, 2008].
Технический результат по заявке заключается в упрощении алгоритма и аппаратуры для управления включением тягового электропривода на выбеге с переходом в режим тяги или выбега.
Это решение обеспечивается тем, что в известном способе в качестве начального значения частоты задают ее максимальное значение при включении тяги и минимальное значение при включении торможения, а в процессе корректировки максимальное значение постепенно уменьшают, а минимальное - увеличивают, продолжая корректировку до достижения синхронной частоты, соответствующей частоте вращения электродвигателя.
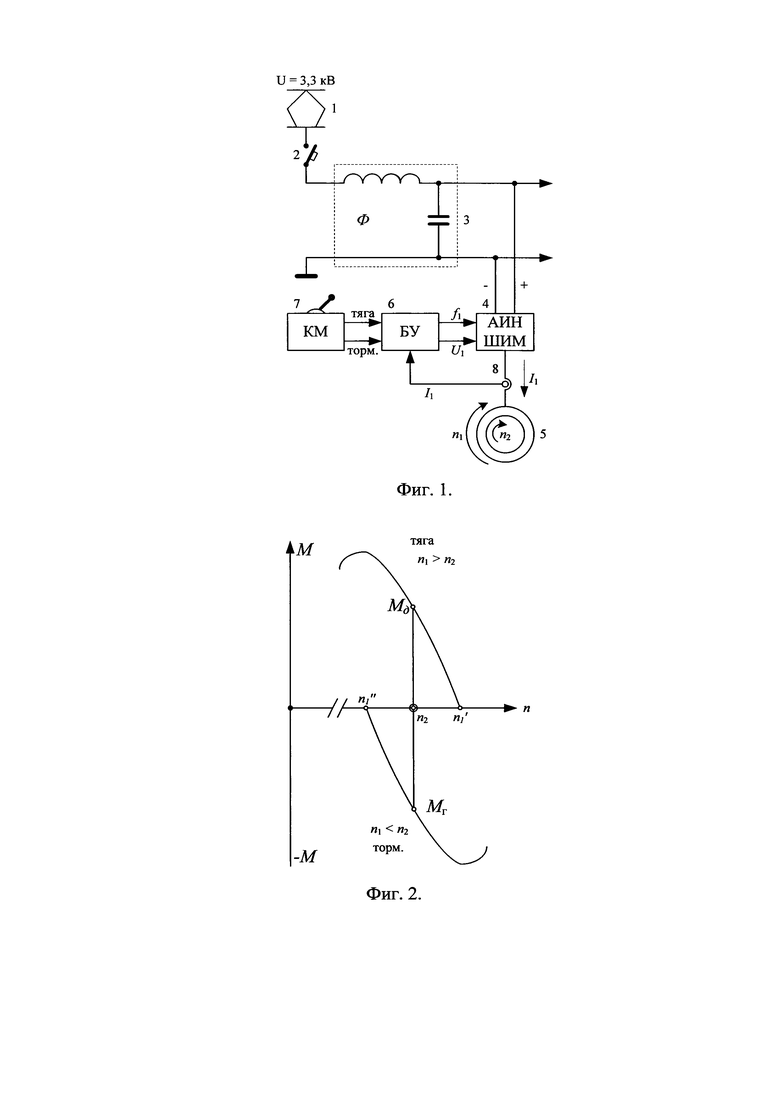
Существо изобретения рассмотрено ниже на примере тягового электропривода электровоза (фиг. 1), содержащего токоприемник 1 с защитной аппаратурой 2, входной фильтр 3 и индивидуальные цепи для питания тяговых двигателей. Каждая из них содержит автономный инвертор напряжения с широтно-импульсным регулированием (АИН-ШИМ) 4 и асинхронный тяговый двигатель 5. Предусмотрен также блок управления 6, входы которого соединены с контроллером машиниста 7 и с датчиком 8, замеряющим ток двигателя I1, т.е. силу тяги или силу электрического торможения.
На фиг. 2 показано функционирование тягового электропривода в осях: М(n), где М - вращающий момент, n - частота вращения. Показан установившейся режим при частоте вращения ротора двигателя n2, частоте вращения магнитного поля статора n′1 в двигательном режиме и n′′1 в генератором (электрическое торможения) режиме. Соответственно для этих режимов реализуются вращающие моменты Мд и Мг, определяемые скольжением [Копылов И.П. Электрические машины. М.: Энергоатомиздат, 2002, 606 с.].


причем частота  , связана с частотой f1 на выходе АИН формулой
, связана с частотой f1 на выходе АИН формулой
n1=60f1/p,
где p - число пар полюсов.
Величина момента М зависит от скольжения S и регулируется изменением частоты f1 и напряжением U1 в соответствием с законом частотного управления [Ильинский Н.Ф., Казаченко В.Ф. Общий курс электропривода. М.], а величина момента контролируется блоком 6 по значению тока I1.
Особенность работы тягового электропривода состоит в переходе на выбег с последующим повторным включением, причем это включение может быть выполнено как в тяговом, так и в тормозном режиме. Режим для включения задают контроллером 7, реализуя его следующим образом:
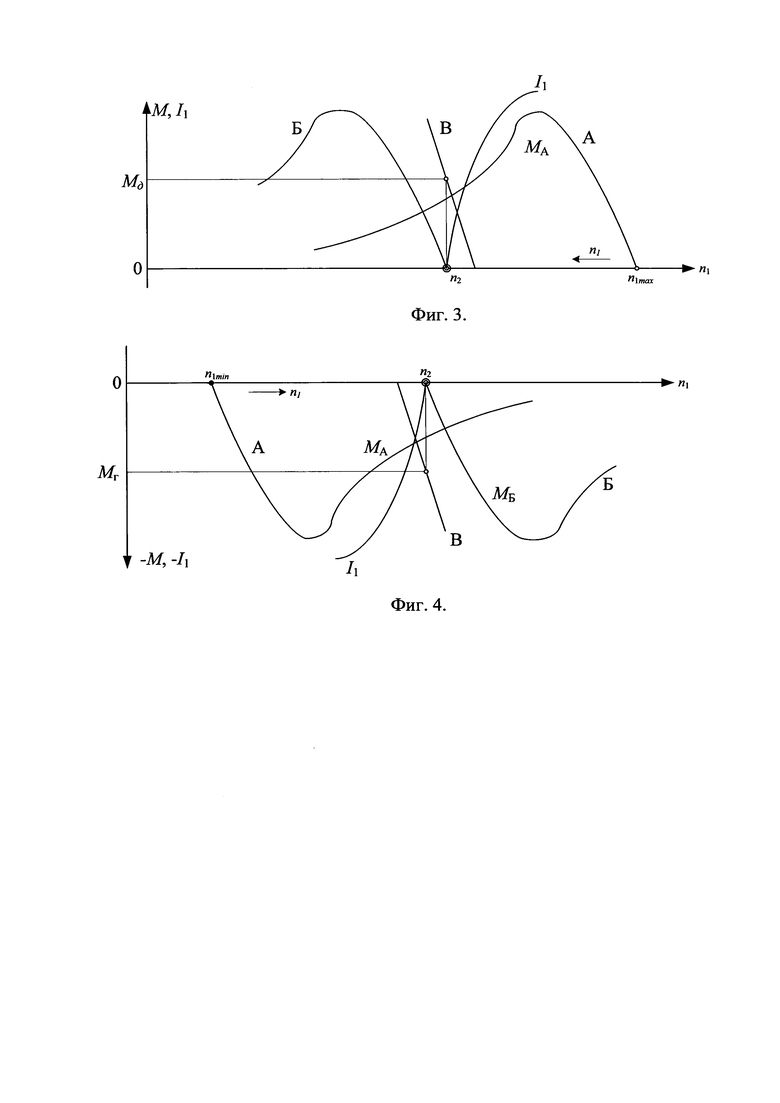
- если задан режим «тяга», то на двигатель 5 подают напряжение U1 частотой n1=n2max; реализуется характеристика А (фиг. 3) при скольжении SA>>0; напряжение U1 при этом должно быть установлено около 20% от номинального, чтобы исключить аномальный режим с повышенным скольжением и соответственно снизить потребляемый ток I1 и вращающий момент Мд. После включения плавно снижают частоту n1, контролируя I1, при этом характеристика А смещается влево и достигается положения Б, когда n1=n (синхронный режим). Этот момент фиксируют по снижению тока до нуля (I1=0). После этого переходят к нормальному режиму, увеличивая частоту n1 и напряжение U1 (характеристика В аналогичная характеристике Мд на фиг. 2);
- если задан режим торможения (рекуперативное или реостатное), то способ включения тягового электропривода аналогичен рассмотренному выше и он показан на фиг. 4. Двигатель 5 включают под напряжение U1, генерируемое инвертором 4 с минимальной частотой n1min. Величина U1 - не более 20% от номинального значения; при этом реализуется генераторный режим с небольшим тормозным моментом и отрицательным скольжением S<<0 (характеристика А). Затем постепенно увеличивают n1=n2 (характеристика Б - соответствует синхронной скорости). Затем уменьшают n1 и увеличивают U1 для перехода в рабочую точку на характеристике В с моментом Мг Поскольку блок управления 6 выполнен на интегральных микросхемах или на микропроцессоре, то переход от n1 к n2 выполняется примерно за 1 сек, а последующий переход к точке рабочего режима Мд или Мг выполняется с учетом динамического критерия, т.е. с постепенным нарастанием сил тяги или торможения.
Реализация данного способа обеспечивает плавное включение тягового электропривода после выбега без выполнения замеров частоты вращения каждой оси электротранспортного средства, за счет чего обеспечивается упрощение системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
| Способ питания асинхронных двигателей трехфазного переменного тока системы вспомогательных машин электровоза | 2019 |
|
RU2714920C1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2006 |
|
RU2320498C1 |
| Система автоматизированного регулирования частоты вращения вентилятора электровоза переменного тока | 2023 |
|
RU2819035C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| Преобразователь тяговый локомотива | 2019 |
|
RU2732816C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2529923C1 |
Изобретение относится к способу пуска электродвигателей. Способ повторного включения асинхронных тяговых двигателей электротранспортного средства на выбеге заключается в том, что задают режим тяги или торможения и начальные значения частоты и напряжения электропитания двигателей, а потом эти значения корректируют, устанавливая требуемый вращающий момент. При этом в качестве начальных значений частоты задают ее максимальное значение при включении тяги и минимальное значение при включении торможения. В процессе корректировки максимальное значение постепенно уменьшают, а минимальное - увеличивают, продолжая корректировку до достижения синхронной частоты, соответствующей частоте вращения электродвигателя. Технический результат заключается в упрощении алгоритма управления включением тягового электропривода на выбеге с переходом в режим тяги или торможения. 4 ил.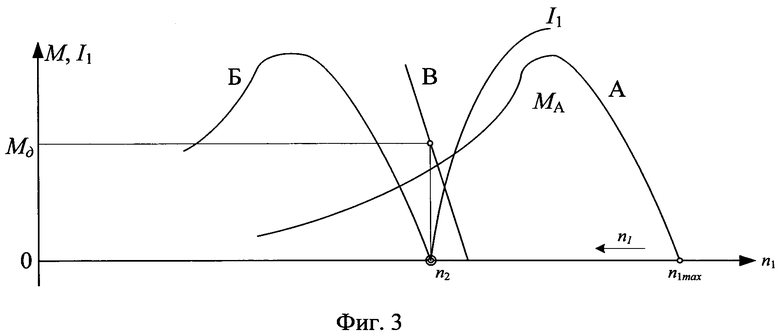
Способ повторного включения асинхронных тяговых двигателей электротранспортного средства на выбеге, заключающийся в том, что задают режим тяги или торможения и начальные значения частоты и напряжения электропитания двигателей, а потом эти значения корректируют, устанавливая требуемый вращающий момент, отличающийся тем, что в качестве начальных значений частоты задают ее максимальное значение при включении тяги и минимальное значение при включении торможения, а в процессе корректировки максимальное значение постепенно уменьшают, а минимальное - увеличивают, продолжая корректировку до достижения синхронной частоты, соответствующей частоте вращения электродвигателя.
| RU 92015170 A, 20.01.1995 | |||
| US 4409533 A1, 11.10.1983 | |||
| Способ управления асинхронным двигателем | 1976 |
|
SU658692A1 |
| SU 1827048 A3, 07.07.1993. | |||

