I
Изобретение относится к области частотно-управляемого электропривода и может быть использовано, например, для систем управления двигателями насосов нефтепроводов, непрерывных линий, циркуляционных насосов, где требуется решение задач быстрейшего восстановления скорости при кратковременных перерывах электроснабжения.
Известно, что при кратковре.менных перерывах электроснабжения и при последуюпдих повторных включениях асинхронного двигателя с незатухшим полем развиваются ударные электромагнитные моменты, значительно превышающие: номинальное значение, которые могут представить угрозу для целостности рабочего механизма.
Если двигатель питается от преобразователя частоты, то при повторном включении возникают значительные переходные токи, способные повреждать вентили преобразователя частоты.
Известен способ управления асинхронным двигателем с предотвращением самозапуска и подавлением ударных моментов при повторном подключении к сети асинхронного двигателя с незатухшим полем, заключающийся в выборе благоприятной паузы перед повторным включением 1.
Известен также способ управления, при
котором в .момент исчезновения напряжения
сети статор двигателя отключается, а после
восстановления напряжения сети и окончания выбега обеспечивается его подключение
к питающей сети .2.
Недостатками известных способов являются значительные провалы скорости и значительная длительность, интервалов восстановления заданной скорости, которые зачастую совершенно недопустимы для ответственных электроприводов.
Цель изобретения - улучшение качества работы электропривода с асинхронным двигателе.м, связанное с уменьшением времени восстановления заданной скорости при ограничении токов вентилей преобразователя частоты и предотвращении ударных электромагнитных моментов.
Указанная цель достигается тем, что в 0 известном способе управления асинхронным двигателем, регулируемым по скорости и току, при перерывах питания от сети переменного тока, подключенной к статору через преобразователь частоты с автономным инвертором тока, заключающемся в том, что в момент исчезновения напряжения сети отключают статор двигателя и подключают его носле восстановления напряжения сети, одновременно с упомянутым отключением статора отключают регулятор скорости при подключенной постоянной уставке тока намагничивания регулятора входного тока инвертора и переключают систему управления инвертором на управление от датчиков параметров двигателя, а после восстановления напряжения сети и подключения статора синхронизируют выходные импульсы системы управления инвертором по положению оси магнитного поля в воздушном зазоре двигателя и через интервал времени, зависящий от времени перерыва напряжения питающей сети, подключают регулятор скорости и переключают систему управления инвертором на ут1равление по абсолютному скольжению ротора двигателя.
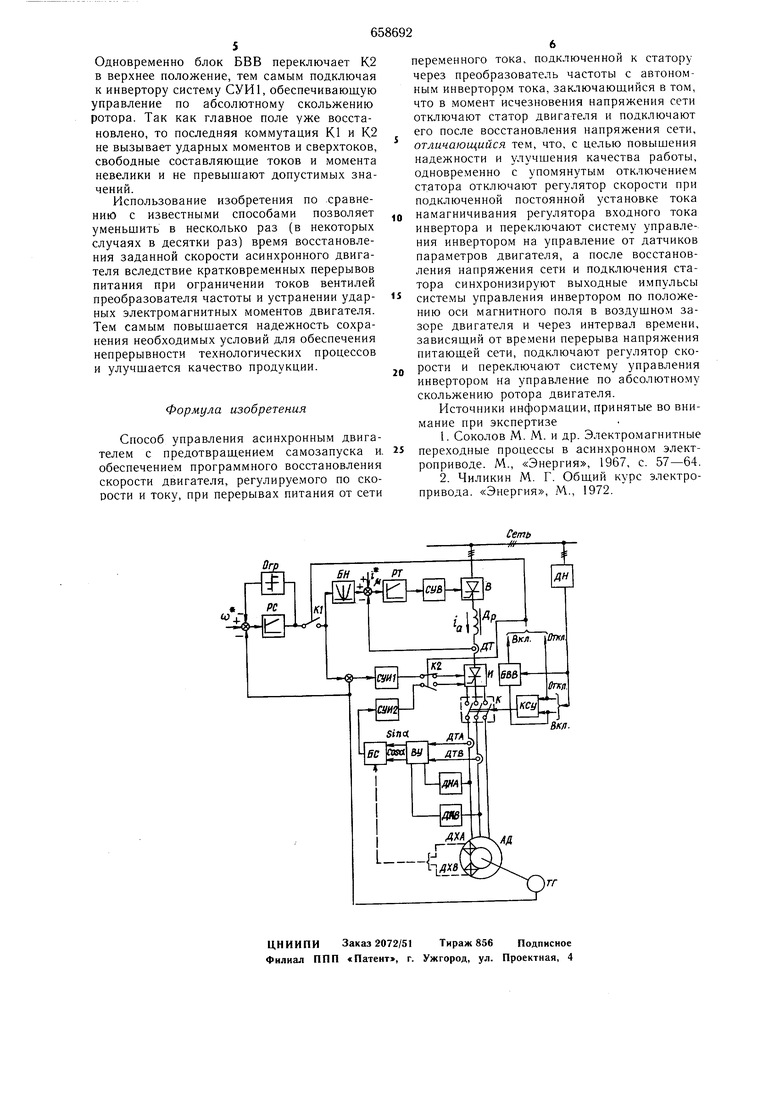
На чертеже представлена схема электропривода с асинхронным двигателем, поясняющая существо изобретения.
Асинхронный двигатель АД питается от преобразователя частоты, состоящего из выпрямителя В с системой управления СУВ, дросселя Др и инвертора И с системами управления СУИ1 и СУИ2, переключаемыми на входе инвертора переключателем К2. Статор АД подключается контактором К, катущка которого управляется от датчика ДН сетевого напряжения через блок управления КСУ. На вход СУИ2 подается сигнал от блока синхронизации БС, связанный через вычислительное устройство ВУ с датчиками фазных токов ДТА, ДТВ и фазных напряжений ДНА, ДНВ либо с датчиками Холла ДХА, ДХВ в воздушном зазоре АД.
Система авторегулирования содержит регулятор скорости PC (с ограничителем Огр), связанным через ключ К1 с входным сумматором СУИ1, подключенным также к тахогенератору ТГ. Кроме того, ключ К1 связан через блок нелинейности БН с регулятором тока РТ, на другие входы которого поданы сигнал уставки тока намагничивания ijsi и выходной сигнал датчика ДТ входного тока инвертора. Кроме того, в схему введен блок выдержки времени БВВ.
Работа электропривода осуществляется следующим образом.
В исходном положении двигатель под нагрузкой вращается с заданной скоростью, поддержание которой обеспечивается совместным действием регуляторов PC и РТ и тем, что инвертор подключен переключателем К2 к системе управления СУИ1. Выходной сигнал PC служит заданием электромагнитного момента, который при замкнутом ключе К1 обеспечивает взаимосвязное управление током статора (через систему управления СУВ выпрямителя) и абсолютным скольжением (через систему управления СУИ1 инвертора). При этом частота ста, тора формируется как сумма частот вращения по сигналу ТГ или цифрового датчика скорости и скольжения, а задание тока формируется как сумма постоянного сигнала i, соответствующего току холостого хода и выходного сигнала PC, подаваемого через блок нелинейности БН, характеристика которого обеспечивает поддержание постоянного магнитного потока в воздущном зазоре двигателя.
В момент исчезновения напряжения сети происходит отключение по сигналу датчика ДН контактора К через его систему управления КСУ, отключение К1 и переключение К2 в верхнее положение. При этом система СУВ подготовлена к восстановлению в дальнейшем сначала лишь токи намагничивания 1м за счет того, что на входе РТ оставлена
А инвертор И пододна установка
готовлен к управлению от СУИ2, выходные импульсы которой синхронизированы блоком синхронизации БС по положению поля в воздушном зазоре. Положение упомянутого поля определяется с помощью двух датчиков Холла - ДХА, ДХВ, - расположенных под углом 120° или 90°. (Положение главного поля может определяться с помощью датчиков фазных токов - ДТА, ДТВ, датчиков фазных напряжений и вычислительного устройства ВУ. В этом случае датчики Холла не требуются).
Блок ВУ формирует сигналы sin а, cos а, где а - угол между осью главного поля и магнитной осью фазы А статора.
После восстановления напряжения сети производится по сигналу датчика ДН включение контактора К. При этом тиристоры инвертора переключаются в точном соответствии с положением главного поля, а ненулевые начальные условия, связанные с наличием незатухщего поля, учитываются автоматически. В силу вышеуказанного происходит нарастание первоначально лишь намагничивающего тока статора до уровня, определяемого уставкой % . При такой принудительной фазировке тока статора в интервале восстановления главного поля электромагнитный момент двигателя равен нулю, т. е. обеспечивается подавление ударных
переходных моментов. Одновременно обеспечивается ограничение переходных токов преобразователя частоты.
Время восстановления главного поля (его можно вычислить или определить экспериментально) является функцией времени перерыва питания, фиксируемого по выходному сигналу ДН. Этот сигнал вводится в блок формирования выдержки времени БВВ.
После восстановления главного поля блок БВВ включает ключ К1 и тем самым задает дополнительную активную составляющую тока статора (определяющую момент).

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1975 |
|
SU611282A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| НАГРУЖАЮЩЕЕ УСТРОЙСТВО СТЕНДА ДЛЯ ИСПЫТАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2032889C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Нагружающее устройство стенда для испытаний двигателей внутреннего сгорания | 1987 |
|
SU1432368A1 |
