ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу оценки поведения водителя во время управления транспортными средствами согласно ограничительной части п. 1 формулы изобретения. Оно относится к системе для оценки поведения водителя во время управления транспортными средствами согласно ограничительной части пункта 8 формулы изобретения. Оно относится также к моторному транспортному средству. Оно относится, кроме того, к компьютерной программе и к компьютерному программному продукту.
УРОВЕНЬ ТЕХНИКИ
Некоторые производители транспортных средств применяют поддержку водителя в форме оценки поведения водителя во время управления транспортными средствами, содержащей различные категории оценки, например категорию оценки вождения на вершине холма для определения того, как транспортное средство управляется на вершинах холмов, категория оценки упреждения для оценки, среди прочего, интервала времени от отпускания акселератора до торможения, и категория оценки выбора передачи для оценки того, правильные ли передачи используются при управлении транспортным средством. Также существует категория оценки торможения, охватывающая то, как используется тормозная система, и оценивающая, до какой степени вспомогательные тормоза используются вместо рабочих тормозов/дисковых тормозов для того, чтобы минимизировать износ.
Водители затем классифицируются по этим категориям. Категория оценки тормоза, главным образом, касается износа; так, низкий износ, т.е. использование вспомогательного тормоза в большей степени в любом месте, где возможно, получает хороший рейтинг. Однако существует проблема в том, что использование вспомогательного тормоза в определенных ситуациях, таких как снижение скорости вдоль маршрута транспортного средства, когда торможение двигателем будет в действительности достаточным, чтобы добиваться желаемого торможения, вызывает ненужный расход топлива. Даже в таких ситуациях водитель получает хорошие рейтинги, несмотря на то, что его вождение не было оптимальным с точки зрения расхода топлива.
ЦЕЛИ ИЗОБРЕТЕНИЯ
Одной целью настоящего изобретения является предложение способа оценки поведения водителя во время управления транспортными средствами во время процессов торможения с целью оптимизации расхода топлива без влияния на безопасность.
Одной целью настоящего изобретения является предложение системы оценки поведения водителя во время управления транспортными средствами во время процессов торможения с целью оптимизации расхода топлива без влияния на безопасность.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Эти и другие цели, указанные посредством описания, изложенного ниже, достигаются посредством способа и системы для оценки поведения водителя во время управления транспортными средствами, моторного транспортного средства и компьютерной программы и компьютерного программного продукта вида, указанного во введении, которое дополнительно представляет признаки, указанные в характеризующей части присоединенных независимых пп. 1 и 8 формулы. Предпочтительные варианты осуществления способа и системы определяются в присоединенных зависимых пп. 2-7 и 9-14 формулы.
Изобретение достигает целей с помощью способа оценки поведения водителя во время управления транспортными средствами, содержащего этап непрерывного характеризования выбранных водителем процессов торможения как основу для упомянутой оценки, содержащего этапы определения причины выбранного процесса торможения и оценки того, является ли уместной реакция на упомянутую определенную причину. Это допускает создание более корректной оценки намерений водителя во время процесса торможения, предоставляя возможность оценки его поведения относительно как расхода топлива, так и безопасности дорожного движения. Оптимизация расхода топлива, в то же время поддержание безопасности дорожного движения, таким образом, становится возможной. Безопасное для дорожного движения и эффективное с точки зрения потребления топлива поведение водителя, таким образом, поощряется.
В одном варианте осуществления способа упомянутые процессы торможения характеризуются с точки зрения вспомогательных тормозов, рабочих тормозов и торможения двигателем. Это допускает при оценке поведения водителя во время процесса торможения определение того, что из вспомогательного тормоза, рабочего тормоза и торможения двигателем водитель должен использовать и до какой степени, и какой из них он фактически использует, для того, чтобы, тем самым, оценивать его поведение.
В одном варианте осуществления способа этап определения причин подразумевает использование средства камеры, допускающего обнаружение знаков ограничения скорости и, таким образом, имеющего возможность идентифицировать, что операция торможения выполнена в ответ на снижение скорости, тем самым облегчая оценку поведения водителя во время процесса торможения. Средство камеры также допускает идентификацию любых помех для транспортного средства, которые относятся к соответствующему процессу торможения, тем самым, облегчая оценку поведения водителя во время процесса торможения.
В одном варианте осуществления способа этап определения причин подразумевает использование картографических данных и средства определения местоположения транспортного средства. Это допускает идентификацию местоположения транспортного средства во время соответствующего процесса торможения и идентификацию любого изменения скорости в соответствующем месте торможения, топографию в месте торможения, любой изгиб дороги в месте торможения и любой выход/вхождение в скольжение в месте торможения для того, чтобы, тем самым, облегчать оценку поведения водителя во время соответствующего процесса торможения.
В одном варианте осуществления способа этап определения причин подразумевает использование средства для записи маневров уклонения. Это упрощает оценку поведения водителя во время процесса торможения, в котором его намерения легче оценить, когда возможно обнаруживать такой маневр, который требует от него следования определенной процедуре торможения, возможно подразумевающей использование рабочего тормоза.
В одном варианте осуществления способ дополнительно содержит этап непрерывного определения условий, в которых транспортное средство управляется, которые принимаются во внимание в упомянутой оценке. Упомянутые условия содержат ситуацию с дорожным движением, время дня, погоду, груз транспортного средства, скорость транспортного средства, тип дороги, например шоссе, национальная автомагистраль и т.д. Оценка поведения водителя во время процесса торможения, таким образом, упрощается, предоставляя возможность более корректной оценки.
В одном варианте осуществления способа этап определения причин подразумевает использование средства для определения характеристик состояния дороги, таких как мокрая поверхность дороги, гравийная дорога и т.п., которые могут влиять на процесс торможения. Оценка поведения водителя во время процесса торможения, таким образом, упрощается.
Изобретение также достигает целей с помощью системы для оценки поведения водителя во время управления транспортными средствами, содержащей средство непрерывного характеризования выбранных водителем процессов торможения как основу для упомянутой оценки, содержащей средство определения причины выбранного процесса торможения и средство для оценки того, является ли уместной реакция на упомянутую определенную причину. Это допускает создание более корректной оценки намерений водителя во время процесса торможения, предоставляя возможность оценки его поведения относительно как расхода топлива, так и безопасности дорожного движения. Оптимизация расхода топлива, в то же время поддержание безопасности дорожного движения, таким образом, становится возможной. Безопасное для дорожного движения и эффективное с точки зрения потребления топлива поведение водителя, таким образом, поощряется.
В одном варианте осуществления системы упомянутые процессы торможения характеризуются с точки зрения вспомогательных тормозов, рабочих тормозов и торможения двигателем. Это допускает при оценке поведения водителя во время процесса торможения определение того, что из числа вспомогательного тормоза, рабочего тормоза и торможения двигателем водитель должен использовать и до какой степени, и какой из них он фактически использует, для того чтобы, тем самым, оценивать его поведение.
В одном варианте осуществления системы упомянутое средство определения причин содержит средство камеры, допускающее обнаружение знаков ограничения скорости и, таким образом, имеющее возможность идентифицировать, что операция торможения выполнена в ответ на уменьшение скорости, тем самым, облегчая оценку поведения водителя во время процесса торможения. Средство камеры также допускает идентификацию любых помех для транспортного средства, которые относятся к соответствующему процессу торможения, тем самым, облегчая оценку поведения водителя во время процесса торможения.
В одном варианте осуществления системы упомянутое средство определения причин содержит блок картографической информации для картографических данных и средство определения местоположения транспортного средства. Это допускает идентификацию местоположения транспортного средства во время соответствующего процесса торможения и идентификацию любого изменения скорости в соответствующем месте торможения, топографию в месте торможения, любой изгиб дороги в месте торможения и любой выход/вхождение в скольжение в месте торможения для того, чтобы тем самым облегчать оценку поведения водителя во время соответствующего процесса торможения.
В одном варианте осуществления системы упомянутое средство определения причин содержит средство для записи маневров уклонения. Это упрощает оценку поведения водителя во время процесса торможения, в котором его намерения легче оценить, когда возможно обнаруживать такой маневр, который требует от него следования определенной процедуре торможения, возможно подразумевающей использование рабочего тормоза.
В одном варианте осуществления система дополнительно содержит средство непрерывного определения условий, в которых транспортное средство управляется, которые принимаются во внимание в упомянутой оценке. Упомянутые условия содержат ситуацию с дорожным движением, время дня, погоду, груз транспортного средства, скорость транспортного средства, тип дороги, например шоссе, национальная автомагистраль и т.д. Оценка поведения водителя во время процесса торможения, таким образом, упрощается, предоставляя возможность более корректной оценки.
В одном варианте осуществления системы упомянутое средство определения причин содержит средство для определения характеристик состояния дороги, таких как мокрая поверхность дороги, гравийная дорога и т.п., которые могут влиять на процесс торможения. Оценка поведения водителя во время процесса торможения, таким образом, упрощается.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет лучше понято посредством прочтения подробного описания, изложенного ниже вместе с присоединенными чертежами, на которых одинаковые обозначения ссылок используются для аналогичных элементов повсюду на различных видах, и
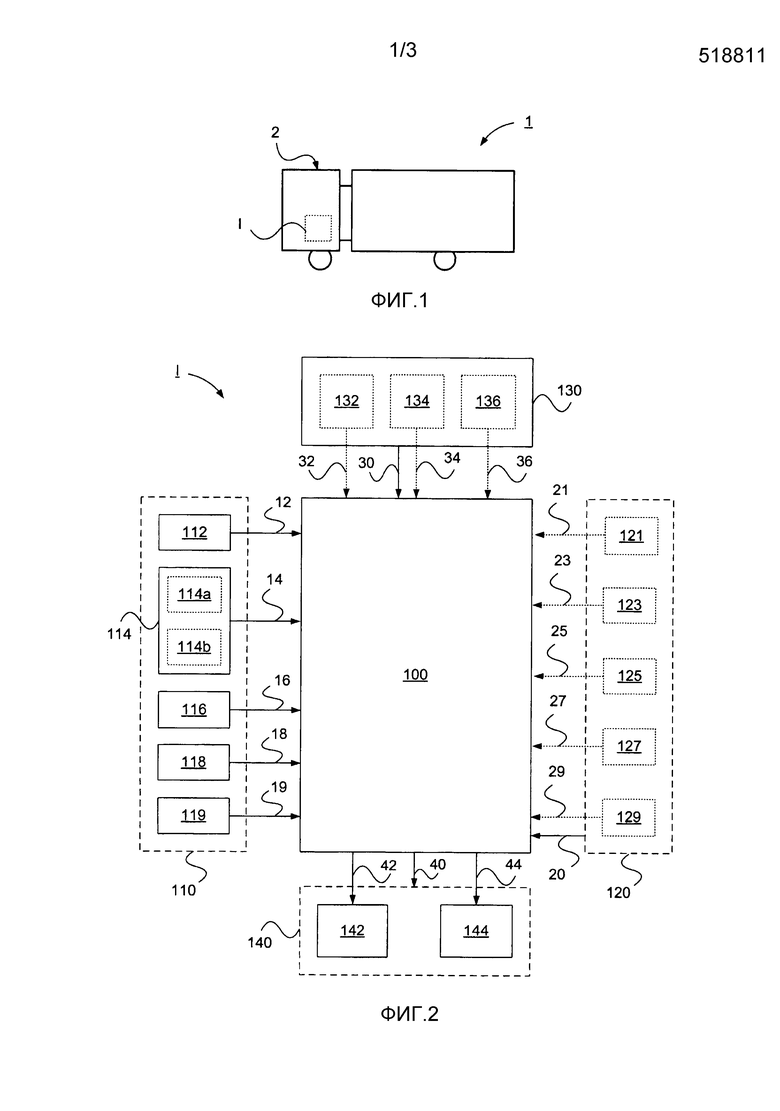
Фиг. 1 схематично иллюстрирует моторное транспортное средство согласно варианту осуществления настоящего изобретения.
Фиг. 2 схематично иллюстрирует систему для оценки поведения водителя во время управления транспортными средствами согласно варианту осуществления настоящего изобретения,
Фиг. 3 является схематичной блок-схемой последовательности операций способа согласно настоящему изобретению, и
Фиг. 4 схематично иллюстрирует компьютер согласно варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Термин "линия связи" ссылается в данном документе на линию передачи данных, которая может быть физическим соединением, таким как оптоэлектронная линия связи, или нефизическим соединением, таким как беспроводное соединение, например линия радиосвязи или линия микроволновой связи.
Фиг. 1 иллюстрирует схематично моторное транспортное средство 1 согласно варианту осуществления настоящего изобретения. Транспортным средством, приведенным в качестве примера, является тяжелое транспортное средство в форме грузовика. Оно может альтернативно быть любым подходящим транспортным средством, например автобусом или легковым автомобилем. Транспортное средство снабжено системой I согласно настоящему изобретению.
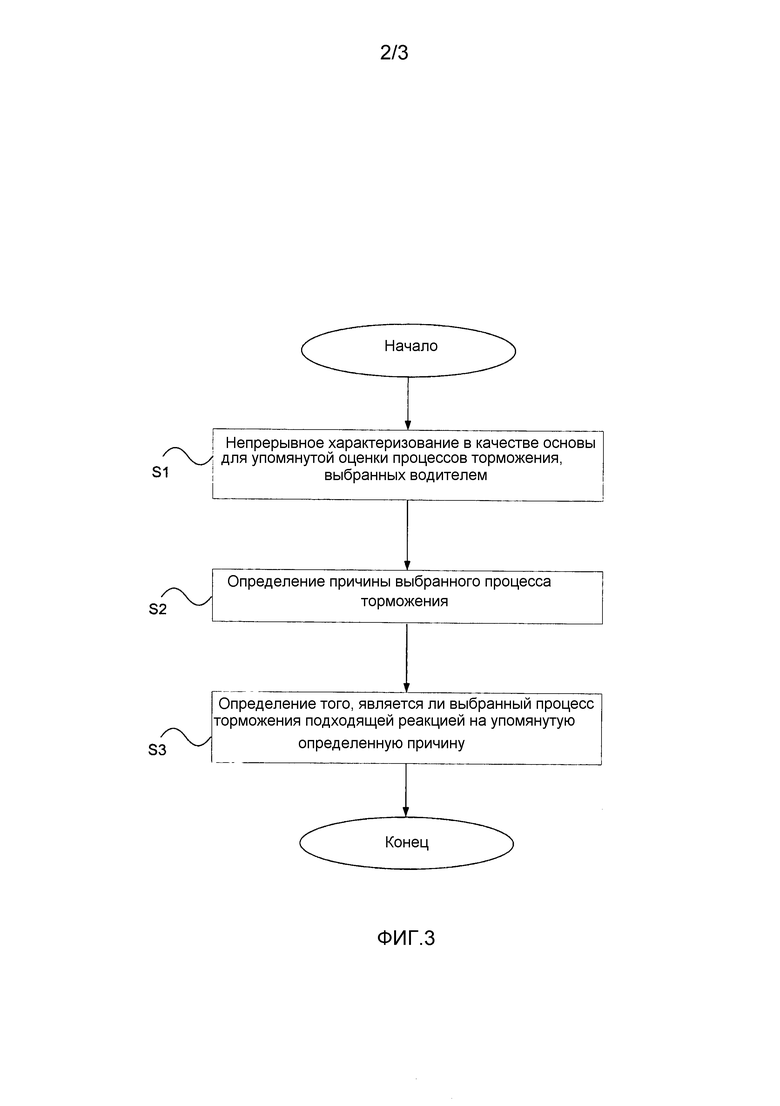
Фиг. 2 является схематичной блок-схемой системы I для оценки поведения водителя во время управления транспортными средствами согласно варианту осуществления настоящего изобретения.
Система I содержит электронный блок 100 управления для упомянутой оценки.
Система содержит средство 110 для определения причины выбранного процесса торможения.
Упомянутое средство 110 для определения причины выбранного процесса торможения содержит средство 112 камеры. Система I, таким образом, снабжена средством камеры для определения причины выбранного процесса торможения. Упомянутое средство камеры приспособлено для того, чтобы обнаруживать знаки ограничения скорости вдоль маршрута транспортного средства для того, чтобы идентифицировать изменения скорости на его протяжении. Упомянутое средство камеры приспособлено в одном варианте, чтобы обнаруживать не только знаки ограничения скорости, но также другие объекты вдоль маршрута транспортного средства, такие как предполагаемые помехи для его движения, например велосипедисты, участники движения, дикие животные, упавшие деревья или т.п.
Упомянутое средство 110 для определения причины выбранного процесса торможения содержит средство 114 определения маршрута. Система I, таким образом, снабжена средством определения маршрута для определения причины выбранных процессов торможения. Упомянутое средство определения маршрута приспособлено, чтобы предоставлять предварительно определенные характеристики проезжей части по маршруту транспортного средства и местоположение транспортного средства на нем.
Упомянутое средство 114 определения маршрута содержит в одном варианте блок 114a картографической информации, заключающий в себе картографические данные, содержащие упомянутые характеристики проезжей части, например топографию в месте торможения, любой изгиб дороги в месте торможения и любой выход/вхождение в скольжение в месте торможения для того, чтобы, таким образом, облегчать оценку поведения водителя во время соответствующего процесса торможения.
Упомянутое средство 114 определения маршрута дополнительно содержит средство 114b определения местоположения маршрута в форме системы определения географического положения, т.е. GPS, чтобы идентифицировать местоположение транспортного средства во время соответствующего процесса торможения.
Средство 114 определения маршрута, т.е. блок 114a картографической информации и средство 114b определения местоположения транспортного средства, таким образом, допускают во время соответствующего процесса торможения идентификацию местоположения транспортного средства и идентификацию любого изменения скорости в соответствующем месте торможения.
Упомянутое средство 110 для определения причины выбранного процесса торможения содержит средство 116 записи маневра уклонения, чтобы записывать маневры уклонения. Система I, таким образом, снабжена средством записи маневра уклонения, которое в одном варианте содержит средство датчика поперечного ускорения.
Упомянутое средство 110 для определения причины выбранного процесса торможения содержит средство 118 определения длины интервала для непрерывного определения интервала между транспортным средством и транспортным средством впереди или эквивалентом и относительных скоростей между транспортным средством и транспортными средствами впереди. Система I, таким образом, снабжена средством определения длины интервала, которое принимает в одном варианте форму радарного средства и/или лазерного измерительного средства. Средство определения длины интервала, таким образом, служит в качестве дополнения к средству 112 камеры для оценки процесса торможения.
Система I дополнительно содержит средство 120 определения условий вождения для определения условий, в которых транспортное средство управляется. Упомянутые условия содержат ситуацию с дорожным движением, время дня с целью оценки того, было ли темно во время соответствующего процесса торможения, погоду, например, выпадали ли какие-либо осадки и их тип, и наружную температуру, груз транспортного средства, скорость транспортного средства, тип дороги, например шоссе или национальная автомагистраль, и т.д.
Упомянутое средство 120 определения условий вождения содержит в одном варианте средство 121 определения ситуации с дорожным движением для определения ситуации с дорожным движением во время соответствующего процесса торможения. Упомянутое средство определения ситуации с дорожным движением содержит в одном варианте средство связи, объединяющее радиоблоки и/или так называемые беспроводные LAN или WLAN для определения ситуации с дорожным движением во время соответствующего процесса торможения. Упомянутое средство определения ситуации с дорожным движением содержит в одном варианте средство датчика на борту транспортного средства, чтобы наблюдать за другими транспортными средствами поблизости и за другими объектами, такими как другие пользователи дороги, например велосипедисты или пешеходы, или за помехами для транспортного средства во время соответствующего процесса торможения. Такое средство датчика может принимать форму средства камеры, радарного средства и/или лазерного измерительного средства.
Упомянутое средство 120 определения условий вождения дополнительно содержит в одном варианте средство 123 определения времени для определения времени, в которое соответствующий процесс торможения имеет место.
Упомянутое средство 120 определения условий вождения дополнительно содержит в одном варианте средство 125 определения погоды для определения погодных условий во время соответствующего процесса торможения. Упомянутое средство определения погоды может содержать средство датчика дождя, средство приема информации о погоде, чтобы принимать информацию о погоде через радио или аналогичное средство.
Упомянутое средство 120 определения условий вождения дополнительно содержит в одном варианте средство 127 определения скорости для определения скорости транспортного средства во время соответствующего процесса торможения. Упомянутое средство определения скорости содержит в одном варианте средство спидометра.
Упомянутое средство 120 определения условий вождения дополнительно содержит в одном варианте средство 129 определения типа дороги для определения типа дороги во время соответствующего процесса торможения, который в одном варианте предоставляется через упомянутые картографические данные от блока 114a картографической информации средства 114 определения маршрута. Это упрощает оценку поведения водителя во время процесса торможения, делая возможным более точную оценку.
Упомянутое средство 110 для определения причины выбранного процесса торможения дополнительно содержит средство 119 определения характеристик состояния дороги для определения характеристик состояния дороги. Система I, таким образом, снабжена средством определения характеристик состояния дороги. Характеристики состояния дороги содержат поверхности дорожного покрытия, такие как мокрые поверхности дороги, гравийные дороги и т.п., которые могут влиять на процесс торможения. Оценка поведения водителя во время процесса торможения, таким образом, упрощается. Упомянутое средство определения характеристик состояния дороги может содержать любое подходящее средство для определения состояния дороги, например средство датчика трения, температурное средство, чтобы определять окружающую температуру и/или температуру дороги, и т.п.
Система I дополнительно содержит средство 130 определения процесса торможения для определения процессов торможения транспортного средства.
Упомянутое средство 130 определения процесса торможения содержит средство 132 определения рабочего тормоза для определения того, действительно ли и, если так, до какой степени средство рабочего тормоза, например ножные тормоза, было использовано во время соответствующего процесса торможения.
Упомянутое средство 130 определения процесса торможения дополнительно содержит средство 134 определения вспомогательного тормоза для определения того, действительно ли и, если так, до какой степени средство вспомогательного тормоза было использовано во время соответствующего процесса торможения.
Упомянутое средство 130 определения процесса торможения дополнительно содержит средство 136 определения торможения двигателем для определения того, действительно ли и, если так, до какой степени средство торможения двигателем было использовано во время соответствующего процесса торможения.
Система I дополнительно содержит средство 140 приема определения процесса торможения, чтобы принимать информацию об оценках процессов торможения.
Упомянутое средство 140 приема определения процесса торможения содержит блок 142 отображения транспортного средства, расположенный в приборной панели транспортного средства, чтобы информировать водителя об оценке текущих процессов торможения, чтобы предоставлять возможность ему немедленно получать сведения о его характере вождения во время процесса торможения.
Упомянутое средство 140 приема определения о процессе торможения содержит отдельные принимающие блоки 144 для приема и записи оценок о поведении водителя во время процессов торможения. Это может включать в себя приемные блоки в помещениях транспортного предприятия, чтобы делать возможным просмотр результатов оценок поведения водителя во время процессов торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 112 камеры через линию 12 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет объектные данные, содержащие в одном варианте информационные данные об ограничении скорости со знаков ограничения скорости, для определения причины выбранных процессов торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 114 определения маршрута через линию 14 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет данные о маршруте, содержащие данные о местоположении от средства 114b определения местоположения транспортного средства, и картографические данные от блока 114a картографической информации для определения причины выбранных процессов торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 116 записи маневров уклонения через линию 16 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет данные о маневре уклонения, для определения причины выбранных процессов торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 118 определения длины интервала через линию 18 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет данные об интервале относительно транспортных средств впереди, для определения причины выбранных процессов торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 119 определения характеристик состояния дороги через линию 19 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет данные о состоянии дороги.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 120 определения условий вождения через линию 20 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет данные об условиях для определения условий, в которых транспортное средство управляется.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 121 определения ситуации с дорожным движением через линию 21 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет данные о ситуации с дорожным движением.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 123 определения времени через линию 23 связи, предоставляющей возможность ему принимать от упомянутого средства сигнал, который представляет данные о времени, для определения времени дня, в которое упомянутый процесс торможения имел место, для того, чтобы, таким образом, определять, преобладали ли ночные условия вождения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 125 определения погоды через линию 25 связи, предоставляющую возможность ему принимать от упомянутого средства сигнал, который представляет данные о погоде для определения погодных условий, которые преобладали во время процесса торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 127 определения скорости через линию 27 связи, предоставляющую возможность ему принимать от упомянутого средства сигнал, который представляет данные о скорости для определения скорости, с которой транспортное средство ехало близко к процессу торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 129 определения типа дороги через линию 29 связи, предоставляющую возможность ему принимать от упомянутого средства сигнал, который представляет тип дороги, по которой транспортное средство ехало во время процесса торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 130 определения процесса торможения через линию 30 связи, предоставляющую возможность ему принимать от упомянутого средства сигнал, который представляет данные торможения относительно типа использованного тормозного средства и степени использования во время процесса торможения.
Электронный блок 100 управления соединяется с возможностью связи с упомянутым средством определения рабочего тормоза через линию 32 связи, предоставляющую возможность ему принимать от упомянутого средства сигнал, который представляет данные рабочего тормоза относительно степени, до которой средство рабочего тормоза было использовано во время процесса торможения.
Электронный блок 100 управления соединяется с возможностью связи с упомянутым средством определения вспомогательного тормоза через линию 34 связи, предоставляющую возможность ему принимать от упомянутого средства сигнал, который представляет данные вспомогательного тормоза относительно степени, до которой средство вспомогательного тормоза было использовано во время процесса торможения.
Электронный блок 100 управления соединяется с возможностью связи с упомянутым средством 136 определения торможения двигателем через линию 36 связи, предоставляющую возможность ему принимать от упомянутого средства сигнал, который представляет данные торможения двигателем относительно степени, до которой средство торможения двигателем было использовано во время процесса торможения.
Электронный блок управления приспособлен, чтобы обрабатывать упомянутые объектные данные от средства 112 камеры, содержащие данные об ограничениях скорости со знаков ограничения скорости во время упомянутых процессов торможения, и/или упомянутые картографические данные от блока 114a картографической информации средства 114 определения маршрута, содержащие ограничения скорости, топологию и какие-либо изгибы дороги, для определения причины упомянутого торможения, и упомянутые данные торможения от средства 130 определения процесса торможения для того, чтобы, тем самым, оценивать, является ли выбранный процесс торможения уместной реакцией на упомянутую определенную причину.
В дополнение к вышеупомянутой обработке электронный блок 100 управления в одном варианте приспособлен, чтобы обрабатывать упомянутые данные о маневре уклонения для того, чтобы оценивать, выполняло ли транспортное средство во время процесса торможения маневр уклонения, и/или данные об интервале для определения расстояний от каких-либо транспортных средств впереди во время процесса торможения для того, чтобы определять причину упомянутого торможения, и/или данные о состоянии дороги для оценки состояния дороги, которое преобладало во время процесса торможения, вместе с упомянутыми данными о тормозе для того, чтобы, тем самым, оценивать, является ли выбранный процесс торможения уместной реакцией на упомянутую определенную причину.
В дополнение к вышеупомянутой обработке, электронный блок 100 управления в одном варианте приспособлен, чтобы обрабатывать упомянутые данные об условиях для того, чтобы определять условия, в которых транспортное средство управлялось во время процесса торможения, вместе с упомянутыми данными торможения для того, чтобы оценивать, является ли выбранный процесс торможения уместной реакцией на упомянутую причину. Упомянутые данные об условиях содержат в одном варианте упомянутые данные о состоянии дорожного движения, данные о времени, погодные данные, данные о скорости и/или данные о типе дороги.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым средством 140 приема определения процесса торможения через линию 40 связи, предоставляющую возможность ему отправлять упомянутому средству сигнал, который представляет данные определения процесса торможения для результатов поведения водителя во время процесса торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым блоком 142 отображения транспортного средства через линию 42 связи, предоставляющую возможность ему отправлять упомянутому блоку сигнал, который представляет данные определения процесса торможения для результатов поведения водителя во время процесса торможения.
Электронный блок 100 управления соединяется с помощью сигналов с упомянутым принимающим блоком 144 через линию 44 связи, предоставляющую возможность ему отправлять упомянутому блоку сигнал, который представляет данные определения процесса торможения для результатов поведения водителя во время процесса торможения.
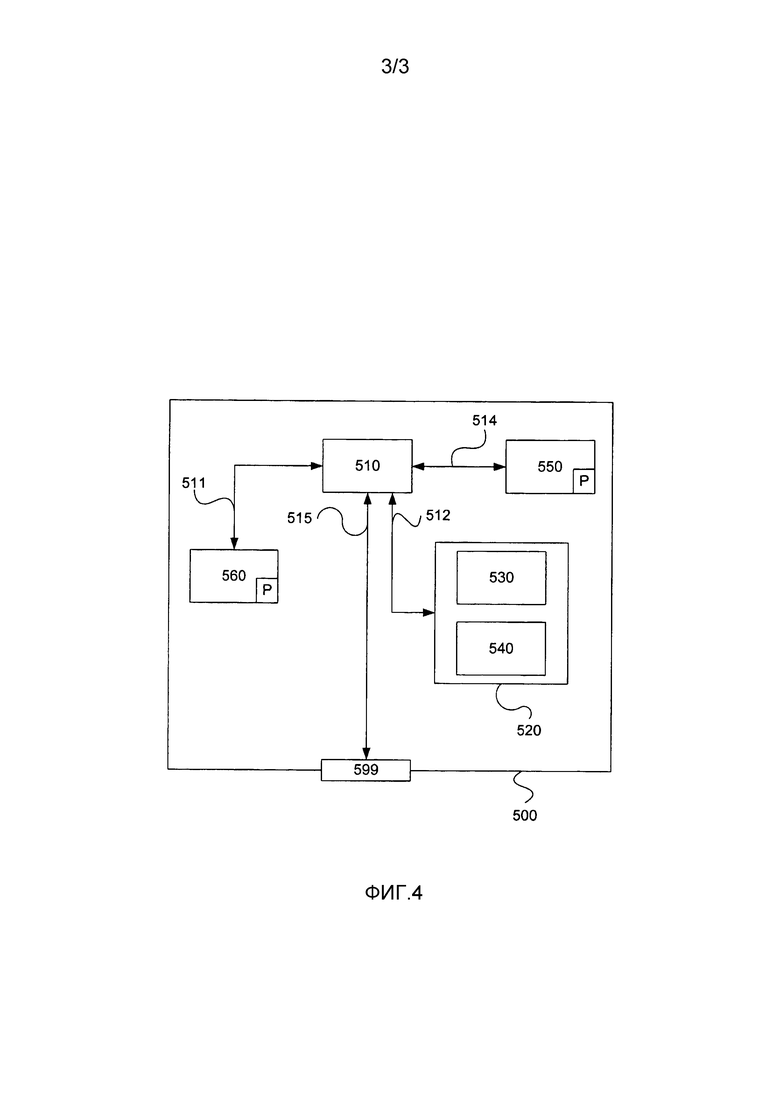
Фиг. 3 является схематичной блок-схемой последовательности операций способа оценки поведения водителя во время управления транспортными средствами согласно варианту осуществления настоящего изобретения.
В одном варианте осуществления способ оценки поведения водителя во время управления транспортными средствами содержит первый этап S1, который непрерывно характеризует выбранные водителем процессы торможения в качестве основы для упомянутой оценки.
В одном варианте осуществления способ оценки поведения водителя во время управления транспортными средствами содержит второй этап S2, который непрерывно определяет причину выбранного процесса торможения.
В одном варианте осуществления способ оценки поведения водителя во время управления транспортными средствами содержит третий этап S3, который оценивает, является ли выбранный процесс торможения соответствующей реакцией на упомянутую причину.
Фиг. 4 является схемой одной версии устройства 500. Блок 100 управления, описанный со ссылкой на фиг. 2, может в одной версии содержать устройство 500. Устройство 500 содержит энергонезависимую память 520, устройство 510 обработки данных и память 550 для чтения/записи. Энергонезависимая память имеет первый элемент 530 памяти, в котором компьютерная программа, например операционная система, хранится для управления функционированием устройства 500. Устройство 500 дополнительно содержит контроллер шины, последовательный порт связи, средство ввода/вывода (I/O), аналого-цифровой (A/D) преобразователь, устройство ввода и передачи времени и даты, счетчик событий и контроллер прерываний (не изображен). Энергонезависимая память также имеет второй элемент 540 памяти.
Предложенная компьютерная программа P содержит алгоритмы для оценки поведения водителя во время управления транспортными средствами согласно инновационному способу. Программа P содержит алгоритмы для непрерывного характеризования выбранных водителем процессов торможения в качестве основы для упомянутой оценки. Она содержит алгоритмы для определения причины выбранного процесса торможения. Она содержит алгоритмы для оценки того, является ли выбранный процесс торможения уместной реакцией на упомянутую определенную причину. Программа P может быть сохранена в исполняемой форме или в сжатой форме в памяти 560 и/или в памяти 550 для чтения/записи.
Когда блок 510 обработки данных описывается как выполняющий некоторую функцию, это означает, что он выполняет некоторую часть программы, сохраненную в памяти 560, или некоторую часть программы, сохраненную в памяти 550 для чтения/записи.
Устройство 510 обработки данных может связываться с портом 599 данных через шину 515 данных. Энергонезависимая память 520 предназначена для связи с устройством 510 обработки данных через шину 512 данных. Отдельная память 560 предназначена, чтобы связываться с блоком обработки данных через шину 511 данных. Память 550 для чтения/записи выполнена с возможностью связи с блоком обработки данных через шину 514 данных. Линии связи, ассоциированные, например, с блоком 100 управления, могут соединяться с портом данных.
Когда данные принимаются в порте 599 данных, они временно сохраняются во втором элементе 540 памяти. Когда принятые входные данные были временно сохранены, блок 510 обработки данных подготавливается, чтобы осуществлять выполнение кода, как описано выше. Сигналы, принятые в порте данных, могут быть использованы устройством 500, чтобы непрерывно характеризовать выбранные водителем процессы торможения в качестве основы для упомянутой оценки. Сигналы, принятые в порте данных, могут быть использованы устройством 500, чтобы определять причину выбранного процесса торможения. Сигналы, принятые в порте данных, могут быть использованы устройством 500, чтобы оценивать то, является ли выбранный процесс торможения уместной реакцией на упомянутую определенную причину.
Части способов, описанных в данном документе, могут выполняться устройством 500 посредством устройства 510 обработки данных, которое запускает программу, сохраненную в памяти 560 или памяти 550 для чтения/записи. Когда устройство 500 запускает программу, способы, описанные в данном документе, выполняются.
Предшествующее описание предпочтительных вариантов осуществления настоящего изобретения предоставлено в иллюстративных и описательных целях. Оно не имеет намерение быть исчерпывающим или ограничивать изобретение описанными вариантами. Множество модификаций и вариантов, очевидно, сами придут на ум специалисту в области техники. Варианты осуществления были выбраны и описаны для того, чтобы лучше объяснять принципы изобретения и их практические применения и, таким образом, делают возможным для специалиста в области техники понимание изобретения для различных вариантов осуществления и с различными модификациями, подходящими для предполагаемого использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2017 |
|
RU2727085C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С АДАПТИВНЫМИ ИНСТРУКЦИЯМИ ПО НАВИГАЦИИ | 2006 |
|
RU2413927C2 |
| СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ (ВАРИАНТЫ) | 2018 |
|
RU2707855C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СПОСОБНОСТИ К ПРЕДВИДЕНИЮ У ВОДИТЕЛЯ | 2007 |
|
RU2449375C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2803428C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАСХОДА ТОПЛИВА | 2007 |
|
RU2436163C2 |
| РЕАКЦИЯ НА УДАР КАМНЯ О ВЕТРОВОЕ СТЕКЛО | 2018 |
|
RU2684339C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2763452C1 |
| СПОСОБ И СИСТЕМА СОЗДАНИЯ ИНФОРМАЦИИ О ТРАФИКЕ, КОТОРАЯ БУДЕТ ИСПОЛЬЗОВАНА В КАРТОГРАФИЧЕСКОМ ПРИЛОЖЕНИИ, ВЫПОЛНЯЕМОМ НА ЭЛЕКТРОННОМ УСТРОЙСТВЕ | 2017 |
|
RU2664034C1 |
| ОЦЕНКА СТИЛЯ ВОЖДЕНИЯ АВТОМОБИЛЕЙ, ОРИЕНТИРОВАННОГО НА ЭКОНОМИЮ ТОПЛИВА | 2012 |
|
RU2616487C2 |
Изобретение относится к способу оценки поведения водителя во время управления транспортными средствами. Способ содержит этап непрерывного характеризования (S1) выбранных водителем процессов торможения в качестве основы для упомянутой оценки. Дополнительно содержит этапы определения (S2) причины выбранного процесса торможения и оценки (S3) того, является ли выбранный процесс торможения уместной реакцией на упомянутую причину. Процесс торможения характеризуется с точки зрения вспомогательных тормозов, рабочих тормозов и торможения двигателем. Настоящее изобретение также относится к системе для оценки поведения водителя во время управления транспортными средствами, моторному транспортному средству, электронному блоку управления. Достигается оптимизация расхода топлива без влияния на безопасность. 4 н.п. и 10 з.п. ф-лы, 4 ил.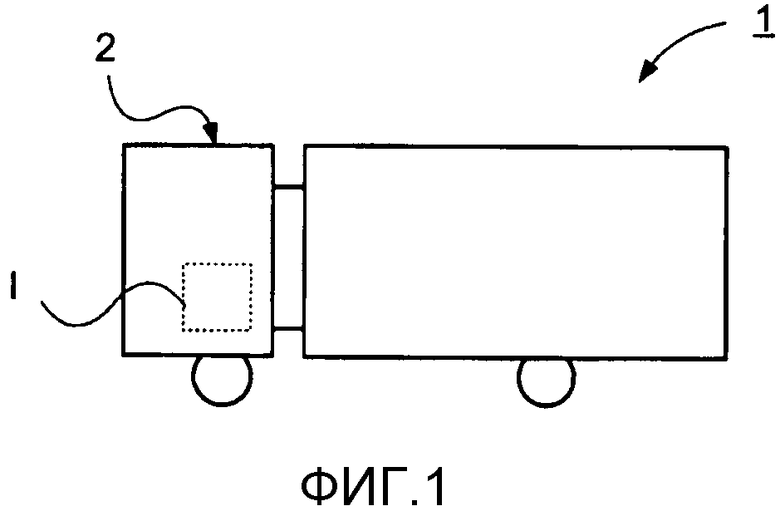
1. Способ оценки поведения водителя во время управления транспортными средствами, содержащий этап, на котором непрерывно характеризуют (S1) выбранные водителем процессы торможения в качестве основы для упомянутой оценки, характеризующийся этапами, на которых определяют (S2) причину выбранного процесса торможения и оценивают (S3), является ли выбранный процесс торможения уместной реакцией на упомянутую определенную причину, в котором упомянутый процесс торможения характеризуется с точки зрения вспомогательных тормозов, рабочих тормозов и торможения двигателем.
2. Способ по п. 1, в котором этап определения причин подразумевает использование средства (112) камеры.
3. Способ по п. 1, в котором этап определения причин подразумевает использование картографических данных и средства (114b) определения местоположения транспортного средства.
4. Способ по любому из пп. 1-3, в котором этап определения причин подразумевает использование средства (116) для записи маневров уклонения.
5. Способ по п. 1, дополнительно содержащий этап, на котором непрерывно определяют условия, в которых управляют транспортным средством, причем эти условия принимаются во внимание в упомянутой оценке.
6. Способ по п. 1, в котором этап определения причин подразумевает использование средства (119) для определения характеристик состояния дороги.
7. Система (I) для оценки поведения водителя во время управления транспортными средствами, содержащая средство (100) для непрерывного характеризования выбранных водителем процессов торможения в качестве основы для упомянутой оценки, характеризующаяся средствами (100, 110, 120, 130) для определения причины выбранного процесса торможения и средствами (100, 110, 120, 130) для оценки того, является ли выбранный процесс торможения уместной реакцией на упомянутую определенную причину, в которой упомянутый процесс торможения характеризуется с точки зрения вспомогательных тормозов, рабочих тормозов и торможения двигателем.
8. Система по п. 7, в которой упомянутое средство для определения причин содержит средство (112) камеры.
9. Система по п. 7, в которой упомянутое средство для определения причин содержит блок (114a) картографической информации для картографических данных и средство (114b) определения местоположения транспортного средства.
10. Система по любому из пп. 7-9, в которой упомянутое средство для определения причин содержит средство (116) для записи маневров уклонения.
11. Система по п. 8, дополнительно содержащая средство (118) для непрерывного определения условий, в которых управляют транспортным средством, причем эти условия принимаются во внимание в упомянутой оценке.
12. Система по п. 8, в которой упомянутое средство для определения причин содержит средство (119) для определения характеристик состояния дороги.
13. Транспортное средство (1), снабженное системой (I) по любому из пп. 7-12.
14. Электронный блок (100) управления, содержащий цифровой носитель данных, который хранит компьютерную программу (Р) для оценки поведения водителя во время управления транспортными средствами, причем программа (Р) содержит программный код, который, когда запускается электронным блоком (100) управления, предоставляет возможность электронному блоку (100) управления выполнять этапы по пп. 1-6
| RU 2008151789 A, 10.07.2010 | |||
| WO 2005003885 A2, 13.01.2005 | |||
| WO 2010059111 A1, 27.05.2010 | |||
| DE 3622447 C1, 28.01.1988. |

