Область техники
Данное изобретение относится к приводу исполнительного механизма управления полетом, в частности к резервному приводу исполнительного механизма управления полетом и устройству суммирования скорости для использования в системе управления полетом.
Уровень техники
Исполнительный механизм управления полетом используется на летательном аппарате для корректировки одного или более параметров полета путем управления рулевой поверхностью.
Как правило, система управления полетом посылает команды приводу электродвигателя, который в свою очередь приводит в движение электродвигатель, обеспечивающий вращение на выходе, которое и используется для управления исполнительным механизмом. Электроника, приводящая в движение двигатель, является наиболее подверженной сбоям частью данной системы по причине испытываемых высоких температурных колебаний. Поэтому, как известно, для приведения в движение исполнительного механизма привода используются два отдельных двигателя и два привода в качестве резервной техники в случае, если один из приводов двигателя или же один из двигателей даст сбой или заклинит.
Устройство суммирования скорости может быть использовано для объединения вращений двух двигателей с целью управления исполнительным механизмом привода посредством суммарного выходного сигнала. Тем не менее, если один из приводов двигателя дает сбой, это может привести к сбою в работе всего устройства, так как вращательный входной сигнал рабочего двигателя заставит неисправный двигатель вращаться в обратную сторону вместо того, чтобы данное вращение передалось на выходной вал устройства суммирования скорости.
Существуют различные тормозящие электромеханические способы для предотвращения обратного вращения неисправного двигателя, но данные тормозные устройства добавляют системе лишний вес и усложняют ее.
Данное изобретение относится по меньшей мере к некоторым из описанных вопросов.
Сущность изобретения
Описанное в данном документе устройство суммирования скорости, управляющее исполнительным механизмом привода, соединено с аэродинамической поверхностью. Устройство суммирования скорости содержит первую и вторую кольцевую шестерни, установленные таким образом, чтобы вращаться вокруг центральной оси, множество пар планетарных механизмов, каждый из которых состоит из первого планетарного механизма, взаимоуправляемо соединенного с первой кольцевой шестерней, и второго планетарного механизма, взаимоуправляемо соединенного со второй кольцевой шестерней, причем первая и вторая планетарные шестерни каждой пары взаимоуправляемо соединены между собой и водилом, обеспечивая вращательный выход для управления исполнительным механизмом привода. Водило, также входящее в состав устройства суммирования скорости, взаимоуправляемо соединено с планетарным механизмом таким образом, что движение планетарных механизмов вокруг центральной оси заставляет водило вращаться, но вращение планетарных механизмов вокруг своей собственной оси не влечет за собой вращения водила.
Термин «взаимоуправляемо соединен» должен пониматься так: две части механизма, о котором идет речь, соединены друг с другом таким образом, что первая может управлять второй и/или наоборот, при этом необязательно их непосредственное прямое задействование в работе. Например, две части механизма могут быть соединены между собой через промежуточный элемент, который передает движение и усилия между двумя частями.
Устройство суммирования скорости может быть плоского типа, то есть не содержать коническую или косую шестерни.
Устройство суммирования скорости может управлять механическим исполнительным механизмом привода, который в свою очередь может быть соединен с аэродинамической/рулевой поверхностью.
Устройство суммирования скорости следовательно может содержать планетарную шестеренчатую сборку, состоящую из двух кольцевых шестерней, пар планетарных механизмов и водил. Кольцевые шестерни расположены в радиальном направлении наружу из водил, соответственно, водила могут перемещаться внутри кольцевых шестерней. Иными словами, кольцевые шестерни расположены вокруг водил. Водило также может быть известно в данной области техники как планетарная обойма или планетарное шестеренчатое водило. Водило также может быть известно в данной области техники как сателлиты.
Кольцевые шестерни могут свободно вращаться вокруг своих осей относительно водила (без учета потерь на трение и т.п.). Другими словами такое вращательное движение планетарных механизмов не передается водилу. Между планетарными механизмами и водилом возможно установить подшипники для обеспечения большей свободы движения.
Вращение первой кольцевой шестерни вокруг центральной оси может привести в движение первый планетарный механизм вместе с первой кольцевой шестерней вокруг центральной оси. Только в данном движении первый планетарный механизм вращается вокруг центральной оси, но не вокруг своей, так как первый планетарный механизм не вращается по отношению к первой кольцевой шестерни, к которой он присоединен. То же самое применимо ко второй кольцевой шестерне и второму планетарному механизму.
Если первая и вторая кольцевая шестерня вращаются в одном направлении и на одной скорости, пары планетарных механизмов также двигаются вместе с первой и второй кольцевыми шестернями вокруг центральной оси, при этом планетарные шестерни не вращаются вокруг собственных осей. В данном случае вращение планетарных механизмов передается водилу (при отсутствии каких-либо потерь эффективности из-за трения и т.п.)
Тем не менее, если первая и вторая кольцевые шестерни вращаются с разными скоростями или одна из них неподвижна, тогда планетарные шестерни в каждой паре вращаются по отношению друг к другу вокруг своих осей. Вращательное движение планетарных механизмов вокруг своих осей не передается водилу. Поэтому более медленное движение (или состояние неподвижности) кольцевой шестерни снижает количество вращения, передаваемое водилу, по сравнению с вариантом, когда та же кольцевая шестерня вращается с той же скоростью, как и другая.
Водило может иметь в своем составе выходной вращательный вал для соединения с исполнительным механизмом привода.
Водило может содержать первую и вторую пластины. Планетарная шестерня может быть взаимоуправляемо соединена с первой и второй пластинами. В частности, планетарные шестерни могут соединяться с первой и второй пластинами таким образом, что вращение планетарных шестерней вокруг центральной оси приводит к вращению пластин, но вращение планетарных шестерней вокруг своих собственных осей не приводит к вращению пластин. Например, первая и вторая концевые части планетарных шестерней могут проходить внутрь или через первую и вторую пластины, но также могут свободно вращаться относительно торцевых пластин. Первая и вторая пластины могут быть соединены друг с другом, соответственно, они вращаются вместе.
Поворотный выходной вал, если он присутствует, может проходить от одной из пластин, первой или второй.
Первая и вторая пластины могут располагаться на некотором расстоянии друг от друга в осевом направлении, при этом первая и вторая кольцевые шестерни позиционируются в (различных) аксиальных положениях между первой и второй концевыми пластинами. Осевое направление устройства суммирования скорости это направление, параллельное центральной оси.
Планетарные шестерни могут проходить между первой и второй пластинами и соприкасаться с соответствующими кольцевыми шестернями на осевых местах между пластинами.
Первая и вторая кольцевые шестерни могут каждая содержать ряд внутренних зубьев на своих внутренних окружных поверхностях и ряд внешних зубьев на своих внешних окружных поверхностей. Первая и вторая планетарные шестерни могут соприкасаться с внутренними зубьями первой и второй кольцевых шестерен соответственно.
Первая и вторая планетарные шестерни каждой пары могут непосредственно сцепляться друг с другом. Например, планетарные шестерни могут каждая содержать зубья на их внешней окружной поверхности, и вместе с этим зубья первой планетарной шестерни сцеплены с зубьями второй планетарной шестерней той же пары.
Первые планетарные шестерни могут не иметь непосредственного соприкосновения со второй кольцевой шестерней и вторые кольцевые шестерни могут не иметь непосредственного соприкосновения с первой кольцевой шестерней.
Первая и вторая планетарные шестерни каждая могут иметь увеличенный участок с поперечным сечением для зацепления с внутренними зубьями первой и второй кольцевых шестерен соответственно, а также уменьшенный участок с поперечным сечением. Поперечное сечение принимается как сечение в радиальном направлении планетарных шестерен, т.е. под прямым углом к осям этих шестерен. Уменьшенные участки с поперечным сечением первой и второй планетарных шестерен могут быть выровнены в осевом направлении со второй и первой кольцевыми шестернями соответственно, следовательно, первая планетарная шестерня не соприкасается (или налаживается) со второй кольцевой шестерней и вторая планетарная шестерня не соприкасается с первой кольцевой шестерней. Планетарные шестерни могут иметь два уменьшенных участка с поперечным сечением, которые простираются на первую и вторую пластины водила.
Увеличенный участок с поперечным сечением каждой первой планетарной шестерни может непосредственно зацепляться с увеличенным участком с поперечным сечением второй планетарной шестерни той же пары.
Устройство суммирования скорости может содержать две или более пар планетарных шестерен. Например, устройство суммирования скорости может иметь ровно две, три или четыре их пары.
Данное изобретение относится к приводному механизму управления полетом, содержащему устройство суммирования скорости, описанное выше, первый двигатель, взаимоуправляемо соединен с первой кольцевой шестерней с помощью первой нереверсивной шестерней таким образом, что первая кольцевая шестерня может передавать усилие только в одном направлении, и второй двигатель взаимоуправляемо соединен со второй кольцевой шестерней через вторую нереверсивную шестерню, соответственно, вторая кольцевая шестерня может передавать механическое усилие только в одном направлении, а именно от двигателей к устройству суммирования скорости.
Нереверсивные шестерни служат для предотвращения вращения первой и второй кольцевых шестерней посредством планетарных шестерней, а также от передачи механического усилия от планетарной шестерни к двигателям.
Настоящее изобретение также относится к приводному механизму управления полетом, содержащему первый двигатель для обеспечения вращения на первом вращательном входе, второй двигатель для обеспечения вращения на втором вращательном входе и устройство суммирования скорости, которое объединяет первый и второй вращательные входы двигателей, образуя один вращательный выход для управления приводом, где устройство суммирования скорости содержит первую и вторую входные шестерни, а первый и второй двигатели присоединены к первой и второй входным шестерням с помощью первой и второй нереверсивных шестерней, соответственно, первая и вторая входные шестерни могут каждая передавать механическое вращательное усилие только в одном направлении, а именно от двигателей к устройству суммирования скорости.
Устройство суммирования скорости также может быть представлено в том виде, которое описано выше, например, его первая и вторая входные шестерни будут представлены первой и второй кольцевыми шестернями.
Двигатели могут быть представлены электродвигателями или другими имеющимися в наличии источниками энергии вращения.
Нереверсивные шестерни предотвращают вращение кольцевых или входных шестерней энергией, исходящей обратно от устройства суммирования скорости и тем самым предотвращают обратный ход двигателя.
Первая и вторая необратимые шестерни могут каждая содержать червячное колесо. Как понимает специалист в данной области, червячным колесом можно управлять только с одной стороны.
Данное изобретение также относится к методу управления приводом, в котором используется устройство суммирования скорости или же приводной механизм управления полетом, описанный выше.
Любой из указанных выше приводных механизмов управления полетом может дополнительно содержать исполнительный механизм. Исполнительный механизм может быть выполнен с возможностью управления одной или несколькими поверхностями управления полетом.
Краткое описание графических материалов
Некоторые иллюстративные варианты реализации данного изобретения могут быть описаны только в виде примера и со ссылкой на фигуры 1-4, где:
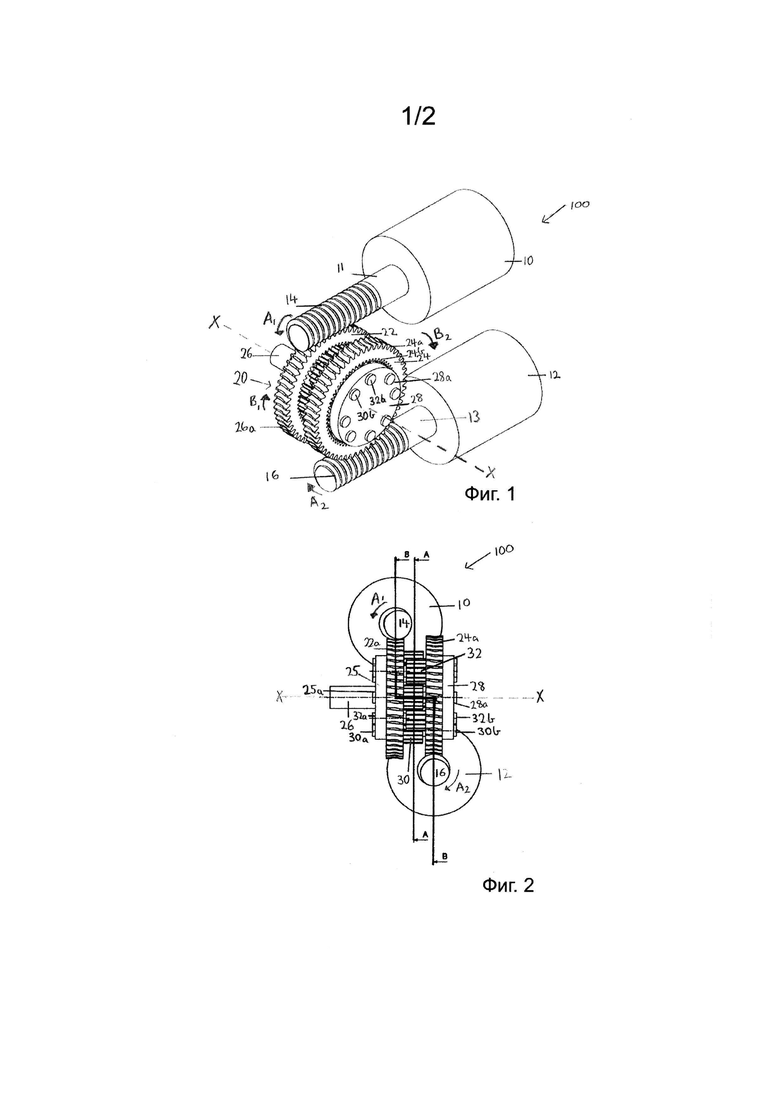
фигура 1 иллюстрирует трехмерный вид привода исполнительного механизма управления полетом в соответствии с одним из вариантов реализации данного изобретения;
фигура 2 иллюстрирует вид сбоку привода исполнительного механизма управления полетом, представленном на фиг. 1;
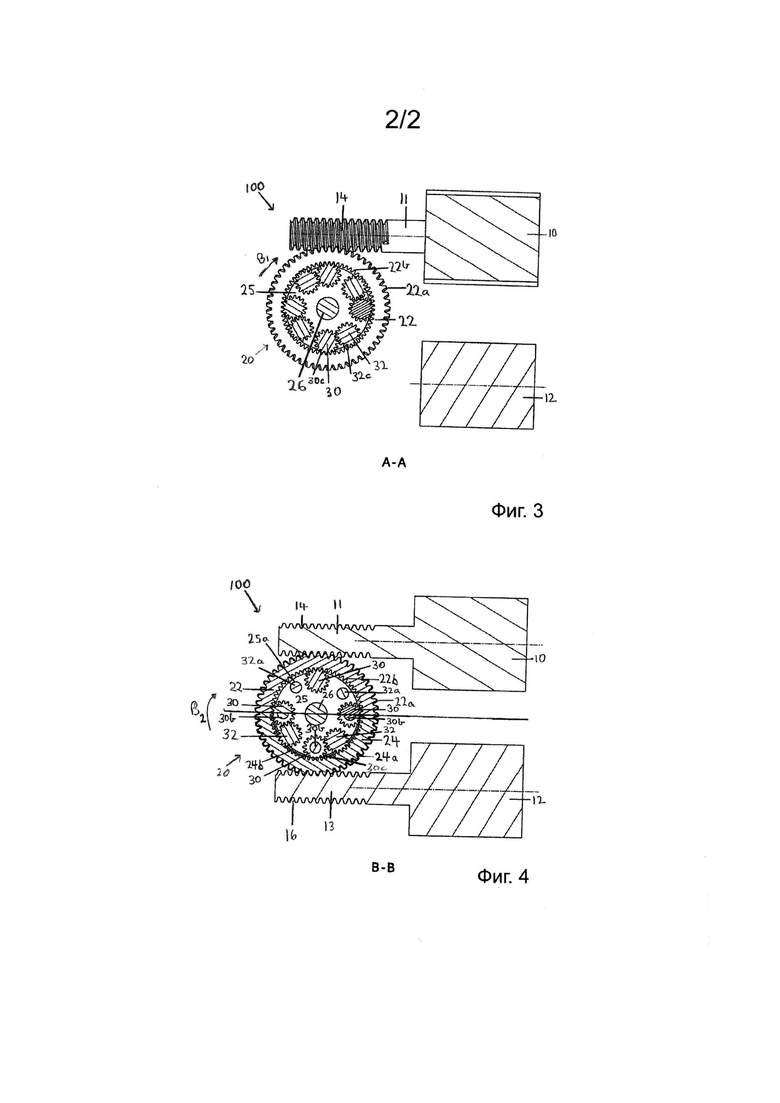
фигура 3 иллюстрирует вид в поперечном сечении, представленный секцией А-А на фиг. 2; и
фигура 4 иллюстрирует вид в поперечном сечении, представленный секцией В-В на фиг. 2.
Фиг. 1-4 иллюстрируют привод исполнительного механизма управления полетом 100, содержащий первый электромотор 10, второй электромотор 12 и устройство суммирования скорости 20. Устройство суммирования скорости 20 содержит первую кольцевую шестерню 22, вторую кольцевую шестерню 24, множество планетарных шестерней 30, 32 и водило, имеющее первую и вторую пластины 25, 28. Поворотный выходной вал 26 для управления исполнительным механизмом (здесь не изображен), соединен с первой пластиной 25. Вращение первой пластины 25 приводит к параллельному вращению вала 26. Исполнительный механизм может управлять положением рулевой поверхности (т.е. аэродинамической поверхностью), такой как руль направления или элерон.
Первая и вторая кольцевые шестерни 22, 24 каждая имеет ряд внешних зубьев 22а, 24а на внешней окружности и ряд внешних зубьев 22b, 24b на внутренней окружности.
Первый и второй электромоторы 10, 12 каждый имеет поворотный выходной вал 11, 13 содержащий червячное колесо 14, 16. Червячные колеса 14, 16 зацепляют внешние зубья 22а, 24а двух кольцевых шестерней 22, 24. Благодаря углу зубьев червячных колес 14, 16 внешних зубьев 22а, 24а кольцевых шестерен 22, 24 червячные колеса 14, 16 приводят в движение кольцевые шестерни 22, 24 в первом вращательном направлении, но кольцевые шестерни 22, 24 не могут привести в движение червячные колеса 14, 16 в обратном направлении. Таким образом, червячные шестерни 14, 16 работают как нереверсивные или односторонние шестерни.
В данном устройстве есть восемь планетарных шестерен 30, 32. Планетарные шестерни 30, 32 представлены четырьмя парами. Каждая пара содержит первую планетарную шестерню 30 и вторую планетарную шестерню 32.
Первые планетарные шестерни 30 имеют внешние зубья 30с, которые зацепляют внутренние зубья 22b первой кольцевой шестерни 22. Первые планетарные шестерни 30 имеют первую и вторую концевые части 30а, 30b уменьшенного поперечного сечения (по сравнению с участком планетарной шестерни 30, имеющей зубья 30с). Первая и вторая концевые части 30а, 30b проходят через отверстия 25а, 28а первой и второй пластины 25, 28 водила. Первые планетарные шестерни 30 могут свободно вращаться вокруг своих осей в пределах отверстий 25а, 28а, относящихся к первой и второй пластинам 25, 28.
Вторые планетарные шестерни 32 имеют внешние зубья 32с, которые зацеплены с внутренними зубьями 24b второй кольцевой шестерней 24. Вторые планетарные шестерни 32 имеют первую и вторую концевые части 32а, 32b уменьшенного поперечного сечения (по сравнению с участком планетарной шестерни 32, имеющей зубья 32с). Первая и вторая концевые части 32а, 32b проходят через отверстия 25а, 28а первой и второй пластины 25, 28 водила. Вторые планетарные шестерни 32 могут свободно вращаться вокруг своих осей внутри отверстий 25с, 28с относительно первой и второй пластины 25, 28.
Первая и вторая планетарные шестерни 30, 32 каждой пары зацеплены друг с другом посредством своих внешних зубьев 30с, 32с, как показано на фиг. 3 и 4. Для этого увеличенные участки поперечного сечения первой и второй планетарных шестерен 30, 32, имея внешние зубья 30с, 32, перекрывают друг друга в осевом зазоре между первой и второй пластинами 25, 28.
Уменьшенный участок поперечного сечения у второй концевой части 30b первой планетарной шестерни 30 проходит вдоль первых планетарных шестерней 30 в положение между первой и второй кольцевыми шестернями 22, 24, соответственно, зубья 30с (на увеличенном участке) не зацепляют вторую кольцевую шестерню 24. Таким же образом, уменьшенный участок поперечного сечения у первой концевой части 32а второй планетарной шестерни 32 проходит вдоль вторых планетарных шестерней 32 в положении между первой и второй кольцевыми шестернями 22, 24, соответственно, зубья 32с (на увеличенном участке) не зацепляют первую кольцевую шестерню 22.
Фигура 3 иллюстрирует вид поперечного сечения привода исполнительного механизма управления полетом 100 по линии А-А фиг. 2. Линия А-А проходит через промежуток между двумя кольцевыми шестернями 22, 24 и показывает четыре зацепленные пары первой и второй планетарных шестерней 30, 32.
Фигура 4 иллюстрирует вид поперечного сечения привода исполнительного механизма управления полетом 100 по линии В-В фиг. 2. Линия В-В проходит через верхнюю половину первой кольцевой шестерни 22, вдоль центральной оси X устройства суммирования скорости 20 и через нижнюю половину второй кольцевой шестерни 24. Линия В-В таким образом проходит через две разные вертикальные пластины.
Фигура 4 иллюстрирует первые планетарные шестерни 30, зацепленные с зубьями 22b первой кольцевой шестерни 22 (верхняя часть фигуры) и вторые планетарные шестерни 32 зацеплены с зубьями 24b второй кольцевой шестерни 24 (нижняя часть фигуры). Зацепления первой и второй планетарных шестерней 30, 32, внутри каждой пары, видны на иллюстрации. В нижней части фигуры можно видеть уменьшенную часть поперечного сечения 30b и увеличенную часть поперечного сечения (с зубьями 30с) первой планетарной шестерни 30. В верхней части фигуры можно видеть уменьшенные части поперечного сечения 32а вторых планетарных шестерен 32. Уменьшенные части поперечного сечения 30b, 32а не зацеплены с кольцевыми шестернями 30, 32.
В нормальном режиме работы для того, чтобы повернуть вал 26 (и управлять исполнительным механизмом привода), оба электродвигателя 10, 12 активируются. Вращение валов двигателя 11, 13 и червячных колес 14, 16 приводит кольцевые шестерни 22, 24 во вращение. В частности, вращение червячного колеса 14 в направлении А1 (фиг. 1) (против часовой стрелки, если смотреть с конца червячного колеса 14) приводит к тому, что первая кольцевая шестерня 22 вращается в направлении В1, а вращение червячного колеса 13 в направлении А2 (по часовой стрелке от конца червячного колеса 13) приводит к тому, что вторая кольцевая шестерня 24 вращается в направлении В2. Направления B1 и В2 одинаковы.
Вращение первой кольцевой шестерни 22 в направлении В1 приводит к движению первой планетарной шестерни 30 вокруг центральной оси X устройства суммирования скорости 20 вместе с первой кольцевой шестерней 22. В этом движении именно зубья 30 с первой планетарной шестерни 30, которые входят в зацепление с внутренними зубьями 22b первой кольцевой шестерни, остаются в зацепление друг с другом. Другими словами, движение первой планетарной шестерни 30 вдоль зубьев 22b первой кольцевой шестерни 22 невозможно. Есть только одно вращение первых кольцевых шестерен 30 вокруг своих собственных осей, которое вызывается вращением вокруг центральной оси, то есть каждая первая планетарная шестерня 30 поворачивается на 360° в течение одного вращения первой кольцевой шестерни 22.
Тоже самое можно сказать и насчет вторых кольцевых шестерней 32, которые зацеплены с внутренними зубьями второй кольцевой шестерни 24 и движутся вокруг центральной оси X вместе со второй кольцевой шестерней во время ее вращения.
Так как первые и вторые планетарные шестерни 30, 32 каждой пары зацеплены друг с другом, они могут вместе двигаться вокруг их соответствующих кольцевых шестерней 22, 24. Если обе кольцевые шестерни 22, 24 вращаются на одной скорости (в одном направлении благодаря червячным колесам), тогда каждая пара планетарных шестерней 30, 32 будет двигаться вокруг центральной оси X, не вращаясь вокруг своих осей соответственно друг другу, т.е. определенные зубья 30с, 32с кольцевых шестерней 30, 32 остаются зацеплены во время вращения вокруг центральной оси X. Движение планетарных шестерней 30, 32 вокруг центральной оси X приводит водило, т.е. пластины 25 и 28, во вращение вокруг центральной оси X. Это в свою очередь приводит во вращение поворотный выходной вал 26.
Если одна из кольцевых шестерней 22, 24 вращается на другой скорости по отношению ко второй, это приводит к тому, что первая и вторая кольцевые шестерни 30, 32 вращаются вокруг своих осей относительно друг друга.
Например, если первая кольцевая шестерня 22 не вращается вообще, возможно, из-за сбоя двигателя 10 или электропривода, а вторая кольцевая шестерня 24 вращается нормально, то первые планетарные шестерни 30 будут выталкиваться по внутренней окружности первой кольцевой шестерни 22 силой вторых кольцевых шестерен 32, с которой они зацеплены. Когда первая кольцевая шестерня 22 не вращается, первые кольцевые шестерни 30 должны вращаться вокруг своей оси, для того чтобы перемещаться вокруг центральной оси X. Другими словами, первые кольцевые шестерни 30 катятся вдоль внутренних зубьев 22b первой кольцевой шестерни 22.
Когда первые кольцевые шестерни 30 вращаются вокруг своих осей, таким же образом вращаются и вторые кольцевые шестерни, с которым они зацеплены. Таким образом, вращаясь вокруг центральной оси X, и первые, и вторые планетарные шестерни 30, 32 будут вращаться вокруг своей оси. Вращение вокруг осей планетарных шестерен 30, 32 не передается на пластины водила 25, 28, так как и первая, и вторая концевые части 30а, 30b, 32а, 32b планетарных шестерней 30, 32 свободно вращаются в отверстиях 25а и 28а пластин 25, 28. Таким образом, не всякое движение второй кольцевой шестерни 24 передается на поворотный выходной вал 26, когда первая кольцевая шестерня 22 находится в неподвижном состоянии. Если первый двигатель 10 выйдет из строя, второй электродвигатель 12, следовательно, должен получить сигнал вращать вал 13 с более высокой скоростью, чтобы обеспечить то же вращение на выходной вал 26 (для того, чтобы управлять исполнительным механизмом привода).
То же должно происходить, если первый двигатель 10 работает, а второй двигатель 12 вышел из строя.
Следует понимать, что данное изобретение описывает привод исполнительного механизма управления полетом 100, который может работать с использованием одного или двух двигателей. Отказ одного двигателя не вызывает остановку в функционировании привода. Для этого предусмотрено резервное оборудование. Вышеприведенное описание является только примером принципов изобретения. Многие модификации и вариации возможны в свете вышеизложенных учений. Таким образом, следует понимать, что в пределах приложенной формулы изобретения, изобретение может быть выполнено иначе, чем с помощью примерных вариантов реализации, которые были описаны. По этой причине следующие формулы изобретения должны быть изучены для определения истинных масштабов и содержания данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УЛУЧШЕНИЯ УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ | 2015 |
|
RU2638067C2 |
| УЗЕЛ ОСИ С МЕХАНИЗМОМ ПРИВОДА С РАСПРЕДЕЛЕНИЕМ КРУТЯЩЕГО МОМЕНТА | 2011 |
|
RU2569722C2 |
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757548C2 |
| ПРИВОДНОЙ УЗЕЛ ДЛЯ ШАССИ ВОЗДУШНОГО СУДНА | 2010 |
|
RU2529558C2 |
| ЗАГРУЗОЧНАЯ УСТАНОВКА ШАХТНОЙ ПЕЧИ С ПРИВОДНЫМ МЕХАНИЗМОМ ДЛЯ РАСПРЕДЕЛИТЕЛЬНОГО ЛОТКА | 2010 |
|
RU2501863C2 |
| СИСТЕМА ПРИВОДА ШАССИ | 2015 |
|
RU2694988C2 |
| Загрузочное устройство шахтной печи | 1979 |
|
SU833168A3 |
| РУЛЕВОЙ КЛАПАН С ПЛАНЕТАРНОЙ ПЕРЕДАЧЕЙ | 2010 |
|
RU2524506C2 |
| ЛИНЕЙНЫЙ ПЕРИСТАЛЬТИЧЕСКИЙ НАСОС | 2012 |
|
RU2606692C2 |
| ДВИГАТЕЛЬНАЯ И ПЕРЕДАЮЩАЯ ДВИЖЕНИЕ СБОРКА, В ЧАСТНОСТИ, ДЛЯ ВИНТОКРЫЛЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2568154C2 |
Привод исполнительного механизма управления полетом (100) содержит первый двигатель (10) для обеспечения первого вращательного входа, второй двигатель (12) для обеспечения второго вращательного входа и устройство суммирования скорости (20) для соединения первого и второго вращательных входов в один вращательный выход для управления исполнительным механизмом. Устройство суммирования скорости (20) содержит первую и вторую кольцевые входные шестерни (22, 24), множество пар планетарных шестерней (30, 32). Первая планетарная шестерня (30) соединена с первой кольцевой шестерней (22), вторая планетарная шестерня (32) соединена со второй кольцевой шестерней (24), причем первая и вторая планетарные шестерни (30, 32) каждой пары взаимоуправляемо соединены друг с другом. Водило, обеспечивающее вращательный выход для управления исполнительным механизмом, соединено с планетарными шестернями. Достигается возможность резервирования привода, снижение веса и упрощение конструкции. 3 н. и 12 з.п. ф-лы, 4 ил.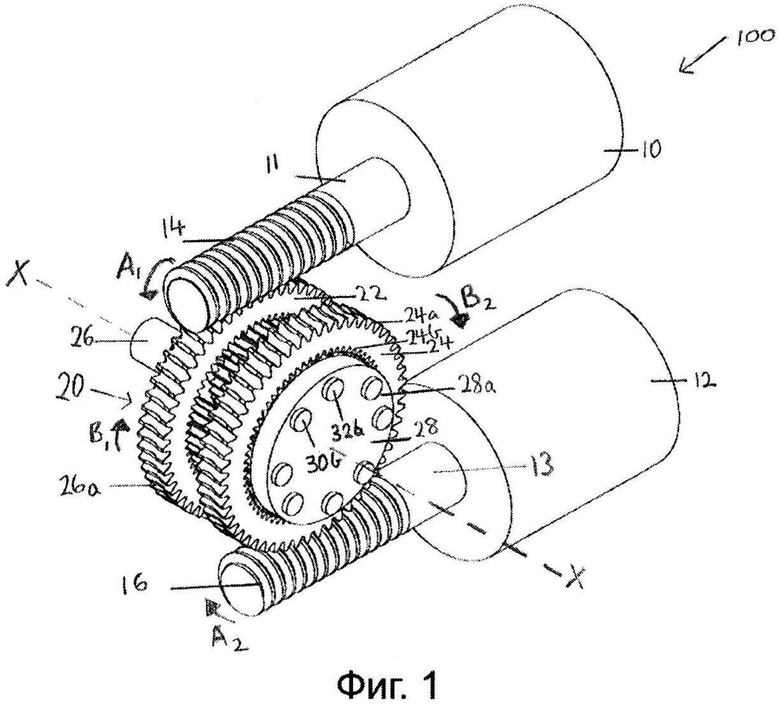
1. Устройство суммирования скорости (20) для управления исполнительным механизмом, которое содержит:
первую кольцевую шестерню (22), выполненную с возможностью вращаться вокруг центральной оси (X);
вторую кольцевую шестерню (24), выполненную с возможностью вращаться вокруг центральной оси (X);
множество пар планетарных шестерней (30, 32), причем каждая пара содержит первую планетарную шестерню (30), взаимоуправляемо соединенную с первой кольцевой шестерней (22), и вторую планетарную шестерню (32), взаимоуправляемо соединенную со второй кольцевой шестерней (24), причем первая и вторая планетарные шестерни (30, 32) каждой пары взаимоуправляемо соединены друг с другом; и
водило, обеспечивающее вращательный выход для управления исполнительным механизмом; причем водило взаимоуправляемо соединено с планетарными шестернями (30, 32) таким образом, что движение планетарных шестерней (30, 32) вокруг центральной оси (X) приводит к вращению водила, но вращение планетарных шестерней (30, 32) вокруг своих осей не приводит водило в движение.
2. Устройство суммирования скорости (20) по п. 1, отличающееся тем, что водило содержит выходной вращательный вал (26) для связи с исполнительным механизмом.
3. Устройство суммирования скорости (20) по п. 1 или 2, отличающееся тем, что водило содержит первую и вторую пластины (25, 28) и каждая из планетарных шестерней (30, 32) взаимоуправляемо соединена с первой и второй пластинами (25, 28).
4. Устройство суммирования скорости (20) по п. 3, отличающееся тем, что первая и вторая пластины (25, 28) разнесены в осевом направлении, при этом первая и вторая кольцевые шестерни (30, 32) расположены в аксиальной позиции между первой и второй пластинами (25, 28).
5. Устройство суммирования скорости (20) по любому из пп. 1, 2, 4, отличающееся тем, что первая и вторая кольцевые шестерни (22, 24) каждая содержит ряд внутренних зубьев (22b, 24b) на внутренних окружностях и ряд внешних зубьев (22а, 24а) на их внешних окружностях, а первая и вторая планетарные шестерни (30, 32) зацеплены с внутренними зубьями (22b, 24b) первой и второй кольцевых шестерней (22, 24) соответственно.
6. Устройство суммирования скорости (20) по любому из пп. 1, 2, 4, отличающееся тем, что первая и вторая планетарные шестерни (30, 32) каждой пары напрямую зацеплены друг с другом.
7. Устройство суммирования скорости (20) по любому из п.п. 1, 2, 4, отличающееся тем, что первые планетарные шестерни (30) не имеют прямого зацепления со второй кольцевой шестерней (24) и вторые кольцевые шестерни (32) не имеют прямого зацепления с первой кольцевой шестерней (22).
8. Устройство суммирования скорости (20) по п. 7, отличающееся тем, что первые и вторые планетарные шестерни (30, 32) каждая имеет увеличенную часть поперечного сечения для зацепления внутренних зубьев (22а, 24а) первой и второй кольцевых шестерней (22, 24) соответственно, и уменьшенную часть поперечного сечения, причем уменьшенные части поперечного разреза первой и второй планетарных шестерней (30, 32) выровнены в осевом направлении со второй и первой кольцевыми шестернями (22, 24) соответственно.
9. Устройство суммирования скорости (20) по п. 8, отличающееся тем, что увеличенные части поперечного разреза каждой первой планетарной шестерни (30) напрямую зацеплены с увеличенной частью поперечного разреза второй планетарной шестерни (32) той же пары.
10. Устройство суммирования скорости (20) по любому из пп. 1, 2, 4, 8, 9, содержащее две или более пар планетарных шестерней (30, 32).
11. Привод исполнительного механизма управления полетом (100), который содержит:
устройство суммирования скорости (20) по любому из предшествующих пунктов;
первый двигатель (10), взаимоуправляемо соединеный с первой кольцевой шестерней (22) посредством первой нереверсивной шестерни (14), соответственно первая кольцевая шестерня (22) может передавать усилие только в одном направлении; и
второй двигатель (12) взаимоуправляемо соединен со второй кольцевой шестерней (24) посредством второй нереверсивной шестерни (16), соответственно вторая кольцевая шестерня (24) может передавать усилие только в одном направлении.
12. Привод исполнительного механизма управления полетом (100) по п. 11, отличающийся тем, что первая и вторая нереверсивные шестерни (14, 16) каждая содержит червячное колесо.
13. Привод исполнительного механизма управления полетом (100), который содержит:
первый двигатель (10) для обеспечения первого вращательного входа;
второй двигатель (12) для обеспечения второго вращательного входа; и
устройство суммирования скорости (20) для соединения первого и второго вращательных входов в один вращательный выход для управления исполнительным механизмом, причем устройство суммирования скорости (20) содержит первую и вторую входные шестерни (22, 24) и первый и второй двигатели (10, 12), соединенные с первой и второй входными шестернями (22, 24) посредством первой и второй нереверсивных шестерней (14, 16), соответственно первая и вторая входные шестерни (22, 24) каждая может передавать усилие только в одном направлении.
14. Привод исполнительного механизма управления полетом (100) по п. 13, отличающийся тем, что устройство суммирования скорости (20) содержит устройство суммирования скорости (20) по любому из пп. 1-10.
15. Привод исполнительного механизма управления полетом (100) по п. 13 или 14, отличающийся тем, что первая и вторая нереверсивные шестерни (14, 16) каждая содержат червячное колесо.
| US 4441675 A, 10.04.1984 | |||
| US 4637272 A, 20.01.1987 | |||
| Способ определения адгезии металлической пленки к диэлектрической подложке | 1985 |
|
SU1310699A1 |
| Протяжка | 1960 |
|
SU139541A1 |
| Суммирующее устройство | 1977 |
|
SU638972A1 |

