Изобретение относится к области управления полетом самолета с неизвестными аэродинамическими характеристиками и неконтролируемыми возмущениями при различных комбинациях внешних подвесок на пилонах. Результат способа заключается в обеспечении заданных характеристик устойчивости и управляемости самолета при вращении по крену, в том числе и при несимметричном размещении внешних подвесок, снижении объема требуемой для синтеза системы управления априорной информации.
Наиболее близким по технической сущности изобретению является способ адаптивного управления самолетом по крену, основанный на текущем оценивании неизвестных параметров объекта управления, т.е. на текущей идентификации математической модели объекта по измерениям его входов и выходов, и на последующем синтезе закона управления, являющегося функцией полученных оценок (Круглов С.П., Сегедин Р.Α., Соколов О.Α., Шушарин М.В. Сравнение двух алгоритмов адаптивного управления: прямого и идентификационного, построенного на упрощенных условиях адаптируемости // Труды VII Международной конференции «Идентификация систем и задачи управления» SICPRO, 2008, стр. 2095).
Недостатками известного способа адаптивного управления являются низкие характеристики устойчивости и управляемости самолета по крену влево и вправо при энергичном маневрировании, обусловленные возникновением дополнительного кренящего момента за счет изменения конфигурации самолета (наличия несимметричных внешних подвесок).
Техническим результатом данного изобретения является повышение характеристик устойчивости и управляемости поперечного движения самолета за счет отслеживания изменения текущей конфигурации самолета, сравнения ее с модельной конфигурацией, вычисления осевых и центробежных моментов инерции самолета и корректировки команд управления самолетом.
Технический результат достигается тем, что в предлагаемом способе адаптивного управления самолетом по крену, основанном на текущем оценивании аэродинамических параметров поперечного движения самолета и формировании сигналов управления, отслеживают изменения текущей конфигурации самолета, сравнивают ее с модельной конфигурацией, вычисляют осевые и центробежные моменты инерции самолета и корректируют команды управления самолетом.
Сущность изобретения заключается в следующем.
Известно (например, Левицкий С.В., Свиридов Н.А. Динамика полета. Издание ВВИА им. проф. Н.Е. Жуковского., 2008, стр. 428), что при изменении конфигурации самолета изменяются моменты инерции, которые оказывают существенное влияние на его динамику в общем и, в частности, в поперечном движении. Предвзлетная конфигурация самолета (размещение конкретных внешних подвесок на заданных пилонах) становится модельной для данного полета, изменение модельной конфигурации отслеживается в полете. Далее сравниваются модельная и текущая конфигурации самолета, при изменении модельной конфигурации пересчитываются моменты инерции и определяется дополнительный кренящий момент Мкр от несимметрично расположенных внешних подвесок и инерционной взаимосвязи продольного и бокового движений.
После определения Мкр вносятся поправки (путем исключения составляющей изменения скорости крена, вызванной Мкр из входного сигнала алгоритма идентификации) в алгоритм идентификации с целью увеличить сходимость вычисляемых оценок параметров. На основании полученных оценок вычисленного Мкр корректируется сигнал управления поперечным движением самолета.
Согласно изобретению регистрируется изменение конфигурации самолета (сброс внешних подвесок с пилонов). Далее осуществляется сравнение модельной и текущей конфигурации. На основании результатов сравнения вычисляются осевые и центробежные моменты инерции, значения которых далее используются при определении Мкр и корректирующих команд управления самолетом.
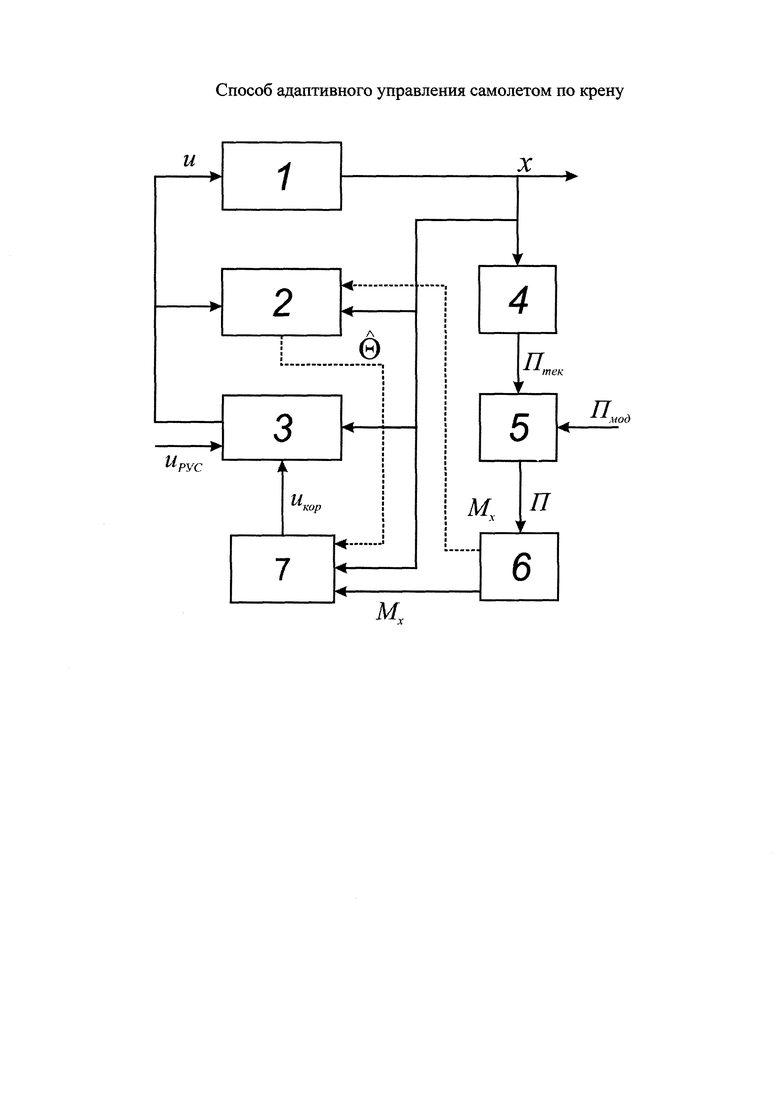
Способ может быть реализован, например, с помощью устройства, схема которого приведена на чертеже, где обозначено: 1 - объект управления (самолет), 2 - идентификатор, 3 - регулятор, 4 - блок отслеживания конфигурации, 5 - блок сравнения конфигураций, 6 - блок оценки моментов инерции, 7 - блок определения корректирующего сигнала, uрус - входной сигнал с ручки управления самолетом, uкор - корректирующий сигнал, u - сигнал, подаваемый на рулевые приводы, x - параметры состояния объекта управления, - оценки аэродинамических характеристик поперечного движения самолета, Птек - текущая конфигурация самолета, Пмод - модельная конфигурация самолета, П - сигнал изменения модельной конфигурации, Мх - сигнал вычисленных осевых и центробежных моментов инерции.
- оценки аэродинамических характеристик поперечного движения самолета, Птек - текущая конфигурация самолета, Пмод - модельная конфигурация самолета, П - сигнал изменения модельной конфигурации, Мх - сигнал вычисленных осевых и центробежных моментов инерции.
Блок отслеживания конфигурации 4 предназначен для формирования сигнала о наличии-отсутствии подвески. Он может быть выполнен, например, в виде контактного устройства (Сажин И.В. Системы электрифицированного оборудования летательных аппаратов: Учеб. пособие. - Иркутск: ИВВАИУ, 2008, стр. 26).
Блок сравнения конфигураций 5 предназначен для сравнения текущей и модельной конфигураций самолета и формирования сигнала изменения конфигурации. Он может быть выполнен, например, в виде схемы сравнения абсолютных значений двух электрических величин (Чернобровов Н.В., Семенов В.А. Релейная защита энергетических систем: Учеб. пособие для техникумов. - М.: Энергоатомиздат, 1998, стр. 385).
Блок оценки моментов инерции 6 предназначен для вычисления осевых и центробежных моментов инерции самолета.
Блок определения корректирующего сигнала 7 предназначен для вычисления корректирующего сигнала.
Блок оценки моментов инерции 6 и блок определения корректирующего сигнала 7 могут быть выполнены, например, в виде программируемой логической интегральной схемы (Стешенко В.Б. ПЛИС фирмы ALTERA: проектирование устройств обработки сигналов. - М.: ДОДЭКА, 2000, 128 с.).
Устройство работает следующим образом.
Сигнал параметров состояния объекта управления 1 подается на вход идентификатора 2, на вход регулятора 3, на вход блока определения корректирующего сигнала 7 и на вход блока идентификации подвески 4, в котором отслеживается изменение модельной конфигурации самолета в полете, из выхода которого сигнал поступает на вход блока сравнения конфигураций 5, где сравниваются модельная и текущая конфигурации самолета. На вход блока оценки моментов инерции 6, в котором происходит расчет осевых и центробежных моментов инерции, поступает сигнал с выхода блока сравнения конфигураций. Выход блока оценки конфигураций связан с входом блока определения корректирующего сигнала 7 и с входом идентификатора, в котором производится определение аэродинамических характеристик поперечного движения в режиме реального времени, например рекуррентным методом наименьших квадратов (например, Александров А.Г. Оптимальные и адаптивные системы. - М.: Высш. школа, 1989, стр. 203). Через выход идентификатора выдается информация об оценках в блок определения корректирующего сигнала. В этом блоке осуществляется вычисление дополнительного отклонения рулевых поверхностей с целью обеспечить модельную скорость крена, обеспечивающую наилучшие маневренные характеристики, значение которой задается заранее в зависимости от режима полета и угла отклонения элеронов. На входы регулятора 3 поступают сигнал с ручки управления самолетом и с блока определения корректирующего сигнала. В регуляторе вырабатывается управляющее воздействие в соответствии с законом регулирования с учетом корректирующего сигнала uкор и его выход связан с входом объекта управления и входом идентификатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ | 2024 |
|
RU2829938C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
Изобретение относится к способу адаптивного управления самолетом по крену. Для адаптивного управления самолетом по крену оценивают текущие аэродинамические параметры поперечного движения самолета, формируют сигналы управления, отслеживают изменения количества и расположения внешних подвесок, сравнивают их с исходным расположением, вычисляют осевые и центробежные моменты инерции самолета, корректируют команды управления самолетом. Обеспечивается устойчивость и управляемость поперечного движения самолета. 1 ил.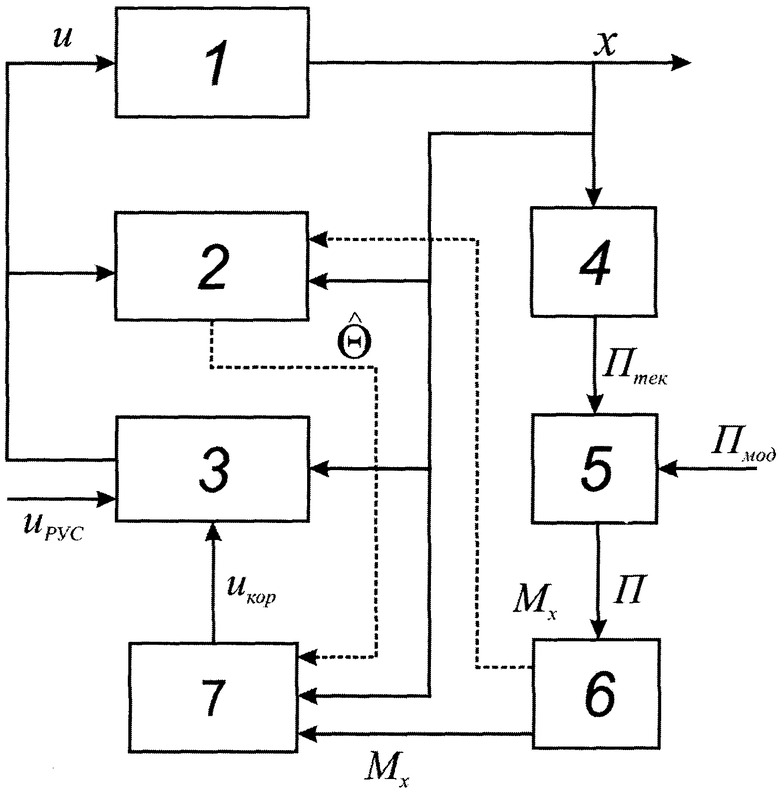
Способ адаптивного управления самолетом по крену, основанный на текущем оценивании аэродинамических параметров поперечного движения самолета и формировании сигналов управления, отличающийся тем, что отслеживают изменения количества и расположения внешних подвесок, сравнивают их с исходных расположением, вычисляют осевые и центробежные моменты инерции самолета и корректируют команды управления самолетом.
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЁТОМ | 2011 |
|
RU2482022C1 |
| Щит для бесчердачных покрытий | 1949 |
|
SU86326A1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338235C1 |

