Изобретение относится к области управления полетом транспортного самолета в продольном канале управления и может быть использовано, в частности, при десантировании моногрузов.
Наиболее близким по технической сущности заявляемому изобретению является устройство, реализующее способ, основанный на управлении транспортным самолетом по тангажу взятием летчиком «на себя» или отдачи «от себя» штурвала, (см., например, Аэродинамика и динамика полета транспортных самолетов / Под ред. Филипова В.В. М.: Воениздат.1981. 415 с. стр. 409). При этом летчик по докладу члена летного экипажа, находящегося в грузовой кабине самолета, отклоняет руль высоты самолета. При страгивании моногруза летчик с упреждением отклоняет штурвал «от себя» на заданную величину и возвращает его в нейтральное положение после сброса.
Недостатком известного устройства является высокая вероятность возникновения авиационного инцидента (превышение допустимых угла атаки или нормальной перегрузки) при управлении самолетом в процессе сброса моногруза, что обусловлено наличием человеческого фактора, приводящего к задержке докладов летчику и, соответственно, запаздывания его управляющих воздействий.
Техническим результатом изобретения является снижение вероятности возникновения авиационного инцидента при управлении самолетом в процессе сброса моногруза.
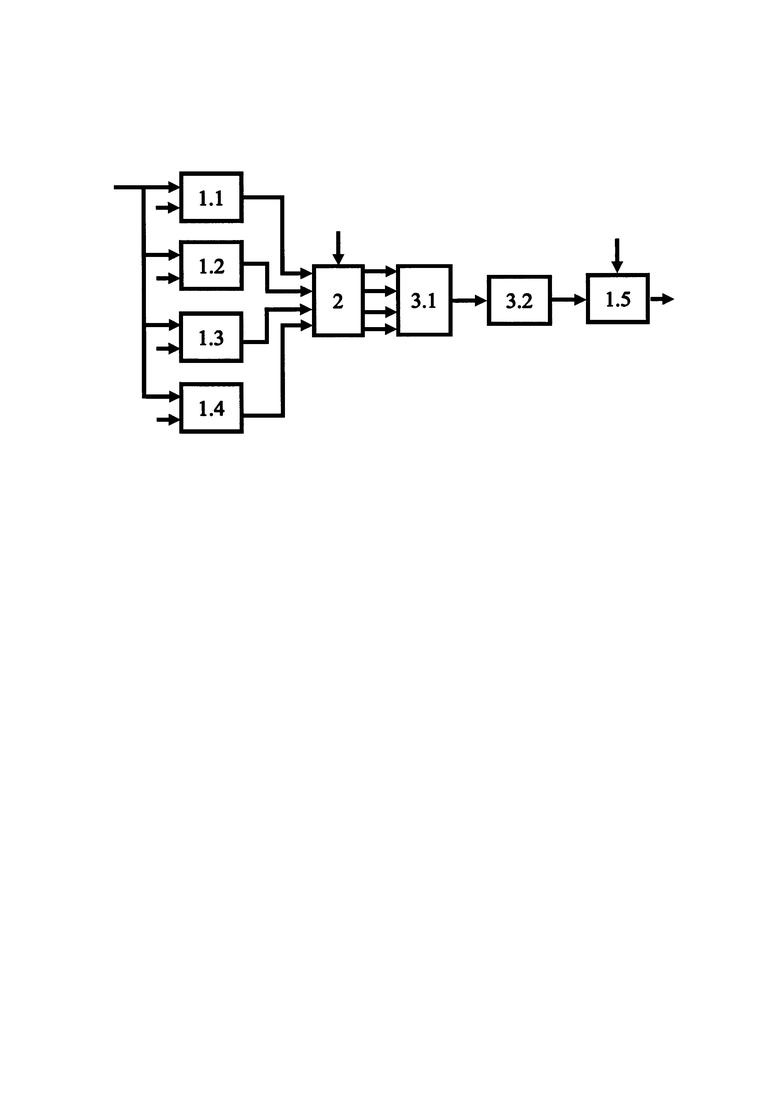
Указанный технический результат достигается тем, что устройство управления транспортным самолетом в продольном канале состоит из последовательно соединенных первой ключевой схемы, блока запоминания, первого, второго идентификатора и пятой ключевой схемы, выход которого является выходом устройства, а также второй, третьей и четвертой ключевых схем, выходы которых соединены с соответствующими входами блока запоминания, при этом первые входы первой, второй, третьей и четвертой ключевых схем являются входами устройства, а их вторые входы и пятый вход блока запоминания - управляющими.
Сущность изобретения заключается в следующем.
Известно (см., например, Кузнецов, А.Д. Способ адаптивного управления военно-транспортным самолетом при беспарашютном десантировании моногруза / А.Д. Кузнецов, Д.В. Верещиков // Труды МАИ. 2016. №89. http://www.mai.ru/science/tmdy/published.php?ID=72913), что процесс десантирования происходит в два этапа. Первый этап начинается с момента открытия рампы и заканчивается в момент нажатия кнопки «Сброс», а второй этап начинается после окончания первого этапа и заканчивается в момент закрытия рампы. На первом этапе положение центра тяжести самолета не изменяется. Следовательно, возмущающий момент тангажа отсутствует. Управление самолетом осуществляется рулем высоты посредством отклонения штурвала летчиком.
С началом второго этапа начинается движение моногруза в грузовом отсеке, и, как следствие, возникает возмущающий момент тангажа (см., например, Аэродинамика и динамика полета транспортных самолетов / Под ред. Филиппова В.В. М: Воениздат.1981. 415 с. стр. 409). Согласно прототипу, возмущающий момент тангажа, который с течением времени увеличивается, компенсируется летчиком. Он стремится удержать самолет в горизонтальном полете, парируя возникающий при движении моногруза по грузовой кабине кабрирующий и при сходе моногруза с обреза грузового люка - пикирующий моменты, соразмерным движением штурвала по командам членов экипажа «от себя» и «на себя» соответственно. Такое управление может привести к авиационному инциденту (см., например, Кузнецов, А.Д. Обоснование автоматизации управления военно-транспортным самолетом в условиях десантирования моногрузов / А.Д. Кузнецов, Д.В. Верещиков // Вестник МАИ. Т.23. 2016. №3. С.121-128). Возмущающий момент возникает и действует на протяжении всего второго этапа десантирования, а именно, с момента нажатия кнопки «Сброс» до закрытия рампы.
Показано (см., например, Кузнецов, А.Д. Применение адаптивного алгоритма управления военно-транспортным самолетом в условиях сброса моногруза / Верещиков Д.В. // Материалы XXVII научно-технической конференции по аэродинамике, п. Володарского, 2016. С.65), что путем оценки возмущающего момента тангажа его можно компенсировать коррекцией сигнала управления рулем высоты. Поэтому, согласно изобретению, в интервале с началом сброса и до закрытия рампы оценивают возмущающий момент тангажа и корректируют сигнал управления рулем высоты. Оценку возмущающего момента тангажа можно получить, например, путем идентификации аэродинамических и инерционных характеристик самолета (частных приведенных к моменту инерции производных момента тангажа по углу атаки, скорости тангажа, углу отклонения руля высоты, а также приведенного момента тангажа при нулевой подъемной силе), соответствующих моменту открытия рампы, например, с использованием известной методики (Дилигенская, А.Н. Идентификация объектов управления / А.Н. Дилигенская. Самарский государственный технический университет, 2009. 136 с). Учитывая, что до момента сброса моногруза возмущающий момент тангажа равен нулю, то полученное значение момента используется для коррекции сигнала управления рулем высоты по тангажу.
Аэродинамические и инерционные параметры самолета, соответствующих моменту открытия рампы, могут быть получены путем идентификации, измеряя текущие значения скорости тангажа, углового ускорения по тангажу, углов атаки и отклонения руля высоты. Значения аэродинамических и инерционных параметров самолета запоминают в момент открытия рампы.
Таким образом, получим точное значение возмущающего момента тангажа, которое необходимо компенсировать и по которому корректируется сигнал управления рулем высоты.
Этим достигается указанный в изобретении технический результат.
Вариант схемы устройства приведен на фигуре, где обозначено: 1.1-1.5 - первая, вторая, третья, четвертая и пятая ключевые схемы соответственно, 2 - блок запоминания, 3.1, 3.2-первый и второй идентификаторы соответственно. Назначение ключевых схем 1.1-1.5 и блока запоминания 2 ясны из их названия, и они могут быть выполнены с использованием промышленно выпускаемых радиотехнических схем аналогичного назначения.
Первый идентификатор 3.1 предназначен для получения оценок аэродинамических и инерционных характеристик самолета в момент открытия рампы путем идентификации параметров состояния самолета.
Второй идентификатор 3.2 предназначен для получения оценки возмущающего момента тангажа по аэродинамическим и инерционным характеристикам самолета, полученным идентификатором 3.1.
Первый 3.1 и второй 3.2 идентификаторы могут быть выполнены на базе программируемой логической интегральной схемы (Стешенко В.Б. ПЛИС фирмы ALTERA: проектирование устройств обработки сигналов. -М.: ДОДЭКА, 2000. - 128 с. ) со специальным программным обеспечением. Специальное программное обеспечение для первого идентификатора 3.1 и для второго идентификатора 3.2 может быть разработано, например, по соответствующей методике (Кузнецов, А.Д. Способ адаптивного управления военно-транспортным самолетом при беспарашютном десантировании моногруза / А.Д. Кузнецов, Д.В. Верещиков // Труды МАИ. 2016. №89. http://www.mai.ru/science/trudy/published.php?ID=72913).
Устройство работает следующим образом.
На первые входы ключевых схем 1.1-1.4 поступают сигналы о состоянии самолета (текущие значения скорости тангажа, углового ускорения по тангажу, углов атаки и отклонения руля высоты). В исходном состоянии ключевые схемы 1.1-1.4 закрыты. При открытии рампы на их управляющие входы поступает сигнал, что рампа открыта. По этому сигналу ключевые схемы 1.1-1.4 открываются и сигналы о состоянии самолета поступают в блок запоминания 2, где происходит их запоминание. С началом сброса по сигналу от кнопки «Сброс» схема запоминания передает информацию на идентификатор 3.2. С этого момента начинается коррекция сигнала управления самолетом. На основе идентификации параметров состояния самолета (рекуррентным методом наименьших квадратов путем оценки различия между действительным и модельным значениями ускорения тангажа) на выходе идентификатора 3.1 получим частные производные приведенных моментов тангажа по углу атаки, скорости тангажа, углу отклонения руля высоты, а также приведенный момент тангажа при нулевой подъемной силе, используя которые на выходе идентификатора 3.2 получим оценку возмущающего момента тангажа, которая поступает на первый вход пятой ключевой схемы 1.5, которая в исходном состоянии открыта. Этот сигнал поступает в систему управления рулем высоты самолета и используется по назначению. При закрытии рампы соответствующая команда поступает на управляющий вход пятой ключевой схемы 1.5, которая закрывается, и коррекция управления рулем высоты прекращается.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЁТОМ ДЛЯ РЕАЛИЗАЦИИ АВТОМАТИЧЕСКОГО ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ТЯЖЁЛЫХ ГРУЗОВ | 2021 |
|
RU2775957C1 |
| СПОСОБ ПИЛОТИРОВАНИЯ САМОЛЕТА ПРИ ВОЗДУШНОМ ДЕСАНТИРОВАНИИ ГРУЗА | 1986 |
|
SU1840016A1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ КОРРЕКТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2192604C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
Устройство управления транспортным самолетом в продольном канале содержит пять ключевых схем, запоминающее устройство, два идентификатора, соединенные определенным образом. Первые входы первых четырех идентификаторов являются входами устройства, вторые входы ключевых схем и пятый вход запоминающего устройства являются управляющими входами. Выход пятой ключевой схемы является выходом устройства. Обеспечивается снижение вероятности возникновения авиационного инцидента при управлении самолетом в процессе сброса моногруза. 1 ил.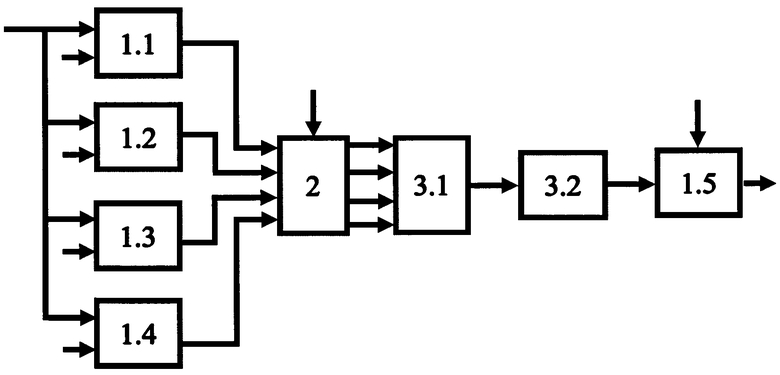
Устройство управления транспортным самолетом в продольном канале, состоящее из параллельно соединенных первой, второй, третьей и четвертой ключевых схем, последовательно соединенных с блоком запоминания, первым, вторым идентификатором и пятой ключевой схемой, выход которой является выходом устройства, а выходы первой, второй, третьей и четвертой ключевых схем соединены с соответствующими входами блока запоминания, при этом первые входы первой, второй, третьей и четвертой ключевых схем являются входами устройства, а их вторые входы, пятый вход блока запоминания и второй вход пятой ключевой схемы - управляющими входами.
| СПОСОБ УПРАВЛЕНИЯ САМОЛЁТОМ ДЛЯ РЕАЛИЗАЦИИ АВТОМАТИЧЕСКОГО ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ТЯЖЁЛЫХ ГРУЗОВ | 2021 |
|
RU2775957C1 |
| Измеритель внешних возмущающих сил и моментов этих сил, действующих на фюзеляж одновинтового вертолета | 2022 |
|
RU2786133C1 |
| БАЛАНСИРОВКА САМОЛЕТА ПРИ ВЗЛЕТЕ С ИСПОЛЬЗОВАНИЕМ СТАБИЛИЗАТОРОВ И РУЛЕЙ ВЫСОТЫ | 2018 |
|
RU2764046C2 |
| Пишущая машина для изготовления текста типографским шрифтом | 1934 |
|
SU43903A1 |
| US 10745115 B2, 18.08.2020 | |||
| KR 1020160046582 A, 29.04.2016. | |||

