Настоящее изобретение относится к области производства военной техники, системе вооружения и защиты и, в частности, может быть использовано для определения местоположения таких огневых точек, как дальнобойные артиллерийские установки и минометы.
Известна проблема необходимости точного, оперативного и надежного определения места расположения огневых точек противника.
Известен реализуемый «Радиолокационной станцией контрбатарейной борьбы» способ контрбатарейной борьбы, включающий засечку артиллерийских средств поражения на ранней стадии полета, проведение нескольких измерений текущего положения боеприпаса с целью расчета его траектории. На основе ее пролонгации и экстраполяции измерений определяются местоположение огневых средств и места возможного попадания их боеприпасов. При этом для засечки огневых позиций артиллерии противника луч РЛС сканирует пространство над линией горизонта, образуя барьер обнаружения. При получении отраженного сигнала станция сопровождает цель в течение времени, необходимого для уточнения траектории полета снаряда и вычисления методом экстраполяции координат огневой позиции и места падения боеприпаса. При этом автоматически определяются калибр боеприпаса и тип стреляющего орудия, оцениваются примерные размеры огневой позиции батареи противника и осуществляется классификация целей по степени их угрозы, см. сайт http://warfiles.ru/show-50343-radiolokacionnye-stancii-kontrbatareynoy-borby-osnovnyh-zarubezh nyh-stran.html.
Однако известный способ и реализующее его устройство являются сложными как технологически, так и в управлении. Кроме того, известный объект является тяжелым, крупногабаритным, что затрудняет его транспортировку к месту установки, т.к. требует для его доставки в зону работы вспомогательный автотранспорт.
Целью настоящего изобретения является достижение технического результата по упрощению конструкции устройства, реализующего способ, облегчению его эксплуатации, удешевление и обеспечение транспортабельности людскими силами.
Указанный технический результат для способа достигается тем, что в известном способе определения местоположения огневой позиции, включающем вращение радиолокационной станции (РЛС), сканирование линии горизонта и последующие вычисления, предлагается выполнить на карте привязку оператора к местности, провести калибровку размеров изображения на мониторе компьютера с размерами реальных объектов окружающей среды, например деревья, возвышенности, горные выступы, установить видеокамеру и вертикально два размещенных друг над другом лазерных излучателя, ориентированных по вертикальной оси, по линии горизонта и в секторе предполагаемого размещения огневых точек, сканирование лазерными излучателями в намеченном секторе сканирования с образованием лазерных плоскостей, при этом сигналы с видеокамеры передаются на монитор компьютера, фиксируются точки пересечения вылетевшего снаряда с лазерными плоскостями, соединяют точки линией, которую экстраполируют до пересечения с поверхностью земли, определяют ее длину, высоту точки пересечения вылетевшего снаряда с нижней лазерной плоскостью над поверхностью земли и вычисляют расстояние до огневой точки по формуле:
 (1)
(1)
где
K - расстояние до огневой точки стреляющего орудия;
h - высота точки пересечения снаряда с нижней лазерной плоскостью, образованной вращающимся нижним лазерным излучателем;
L - расстояние от точки пересечения вылетевшего снаряда с нижней лазерной плоскостью, образованной вращающимся нижним лазерным излучателем до огневой точки.
Технический результат для устройства, реализующего способ определения местоположения огневой точки первого варианта, достигается тем, что в известном устройстве, включающем двигатель и компьютер, предлагается
установить вертикально на оси вращения реверсивного двигателя два, один над другим, лазерных излучателя, видеокамеру, которые азимутально ориентированы по линии горизонта, выход видеокамеры предлагается соединить с компьютером, при этом реверсивный двигатель предлагается подключить к выходу триггерного регистра, вход которого соединен с генератором импульсов регулируемой частоты.
Изобретение поясняется графическими материалами.
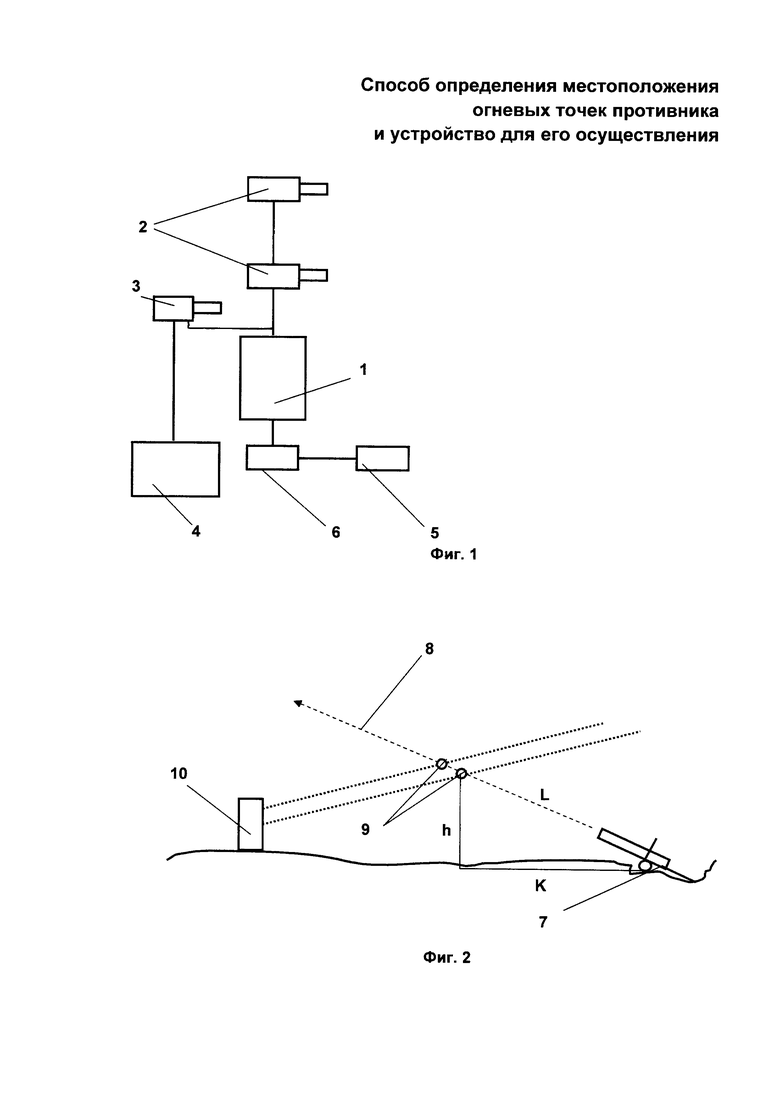
На Фиг. 1 представлена конструктивная блок-схема устройства, реализующего способ. На Фиг. 2 представлен схематичный рисунок для вычисления местоположения огневых точек.
Устройство, реализующее заявленный способ определения местоположения огневой точки, представленное на чертежах включает:
1 - реверсивный двигатель;
2 - лазерный излучатель;
3 - видеокамеру;
4 - компьютер;
5 - генератор импульсов регулируемой частоты;
6 - триггерный регистр;
7 - местоположение огневой точки;
8 - траектория полета снаряда (мины);
9 - точки пересечения снаряда с лазерной плоскостью;
10 - устройство для реализации способа определений местоположения огневых точек включает объекты 1-6.
Устройство 10, реализующее способ определения местоположения огневых точек противника, см. Фиг. 1, состоит из реверсивного двигателя 1, на оси которого установлены вертикально два, один над другим, лазерных излучателя 2 и видеокамера 3, которые ориентированы азимутально по линии горизонта, выход с видеокамеры 3 соединен с компьютером 4, при этом реверсивный двигатель 1 подключен к выходу триггерного регистра 6, вход которого соединен с генератором импульсов 5 регулируемой частоты.
Заявленный способ определения местоположения огневой позиции работает следующим образом.
Устройство с вертикально размещенными на оси реверсивного двигателя 1, друг над другом, лазерными излучателями 2 и видеокамерой 3 устанавливают в зоне возможного появления траектории полета снаряда. На карте выполняют привязку устройства к местности и проводят калибровку размеров изображения на мониторе компьютера 4 с размерами реальных объектов окружающей среды, например деревья, возвышенности, горные выступы. Лазерные излучатели 2 и видеокамеру 3 ориентируют по линии горизонта. При начале обстрела с огневой точки включают реверсивный двигатель 1, который производит сканирование сектора полета снарядов лазерными излучателями 2. При непрерывном высокоскоростном сканировании лазерных излучателей 2 образуются лазерные плоскости. При обстреле вылетевший с огневой позиции снаряд (мина) пересекает поочередно нижнюю и затем верхнюю лазерные плоскости, что проявляется в виде двух засветок 9, которые фиксируются в виде светлых точек на мониторе компьютера 4. Эти точки соединяют линией, которую, здесь же, на мониторе компьютера 4 экстраполируют до пересечения с поверхностью земли, после чего определяют ее положение на карте местности. Таким образом определяется направление возможного расположения огневой точки. Но огневая точка может быть расположена в лесу, в овраге и для определения ее точного положения производят дополнительные вычисления:
- высоту h точки пересечения снаряда с нижней лазерной плоскостью, образованной нижним лазерным излучателем,
- расстояние L от точки пересечения вылетевшего снаряда (мины) с лазерной плоскостью, образованной сканирующим нижним лазерным излучателем до огневой точки.
После этого проводят вычисления до местоположения огневой точки по формуле (1) согласно схеме, см. Фиг. 2.
где
K - расстояние до огневой точки стреляющего орудия;
h - высота точки пересечения снаряда с нижней лазерной плоскостью, образованной нижним лазерным излучателем;
L - расстояние от точки пересечения вылетевшего снаряда (мины) с нижней лазерной плоскостью, образованной сканирующим нижним лазерным излучателем до огневой точки.
Таким образом, заявленный способ и реализующее его устройство обеспечивают точное и оперативное определение расположения огневой точки. При этом устройство, реализующее заявленный способ, является легким для переноски двумя специалистами и простым в эксплуатации.
Заявленное изобретение является новым, ранее нигде неизвестным, что говорит о его соответствии критерию патентоспособности - новизна.
Заявленное изобретение может быть изготовлено на любом приборостроительном или радиотехническом предприятии средней степени технологической оснащенности, что говорит о его соответствии критерию патентоспособности - промышленная применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛАЗЕРНОГО ИЗЛУЧАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2456543C1 |
| Способ борьбы с артиллерией противника | 2018 |
|
RU2694421C1 |
| Способ определения центра сейсмических колебаний и сейсмодатчик для его реализации | 2017 |
|
RU2672811C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| Автомобиль для перевозки военнослужащих 2 | 2020 |
|
RU2724572C1 |
| Автоматизированный боевой комплекс | 2018 |
|
RU2724448C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА НА МЕСТНОСТИ | 2005 |
|
RU2285272C1 |
| УСТРОЙСТВО ДЛЯ УНИЧТОЖЕНИЯ КОРАБЛЕЙ ПРОТИВНИКА | 2015 |
|
RU2605566C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И РЕАЛИЗУЮЩАЯ ЕГО СИСТЕМА ВЫСОКОТОЧНОГО ОРУЖИЯ | 2017 |
|
RU2663764C1 |
Способ определения местоположения огневых точек противника и устройство, его реализующее, основано на том, что выполняют на карте привязку оператора к местности, проводят калибровку размеров изображения на мониторе компьютера с размерами реальных объектов окружающей среды. Далее устанавливают видеокамеру и вертикально два размещенных друг над другом лазерных излучателя, ориентированных по вертикальной оси. Проводят сканирование лазерными излучателями в намеченном секторе с образованием лазерных плоскостей, фиксируют точки пересечения вылетевшего снаряда с лазерными плоскостями, соединяют точки линией, которую экстраполируют до пересечения с поверхностью земли, определяют ее длину, высоту точки пересечения вылетевшего снаряда и вычисляют расстояние до огневой точки. Технический результат - упрощение конструкции устройства, реализующего способ, облегчение его эксплуатации. 2 н.п. ф-лы, 2 ил.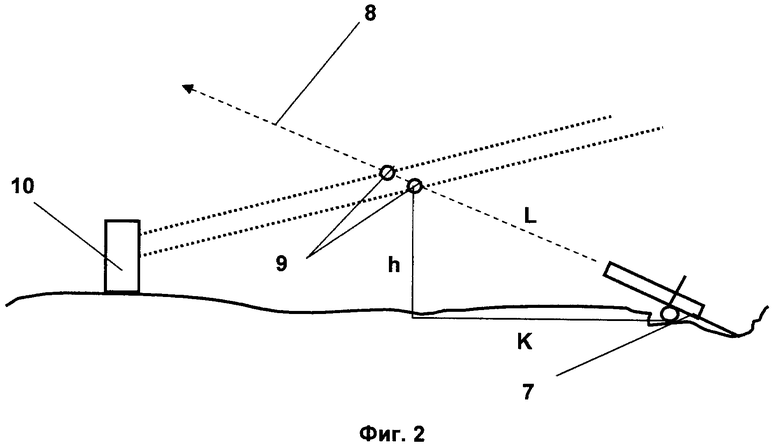
1. Способ определения местоположения огневых точек противника, включающий вращение радиолокационной станции (РЛС), сканирование линии горизонта и последующие вычисления, отличающийся тем, что выполняют на карте привязку оператора к местности, проводят калибровку размеров изображения на мониторе компьютера с размерами реальных объектов окружающей среды, например деревья, возвышенности, горные выступы, устанавливают видеокамеру и вертикально два размещенных друг над другом лазерных излучателя, ориентированных по вертикальной оси, по линии горизонта и в секторе предполагаемого размещения огневых точек, проводят сканирование лазерными излучателями в намеченном секторе с образованием лазерных плоскостей, при этом сигналы с видеокамеры передают на монитор компьютера, фиксируют точки пересечения вылетевшего снаряда с лазерными плоскостями, соединяют точки линией, которую экстраполируют до пересечения с поверхностью земли, определяют ее длину, высоту точки пересечения вылетевшего снаряда с нижней лазерной плоскостью над поверхностью земли и вычисляют расстояние до огневой точки по формуле:
 (1)
(1)
где
K - расстояние до огневой точки стреляющего орудия;
h - высота точки пересечения снаряда с нижней лазерной плоскостью, образованной вращающимся нижним лазерным излучателем;
L - расстояние от точки пересечения вылетевшего снаряда с нижней лазерной плоскостью, образованной вращающимся нижним лазерным излучателем до огневой точки.
2. Устройство для реализации способа определения местоположения огневых точек противника по п. 1, содержащее реверсивный двигатель и компьютер, отличающееся тем, что на вертикальной оси вращения реверсивного двигателя установлены два, один над другим, лазерных излучателя, видеокамера, которые азимутально ориентированы по линии горизонта, выход видеокамеры соединен с компьютером, при этом реверсивный двигатель подключен к выходу триггерного регистра, вход которого соединен с генератором импульсов регулируемой частоты.
| US 2015015869 A1 15.01.2015 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛАЗЕРНОГО ИЗЛУЧАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2456543C1 |
| СПОСОБ БЕТОНИРОВАНИЯ МОНОЛИТНЫХ ЖЕЛЕЗОБЕТОННЫХ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ, ПРОТЯЖЕННЫХ ПО ПЛОЩАДИ | 2001 |
|
RU2208083C2 |
| US 5601024 A 11.02.1997 | |||
| US 2008201100 A1 21.08.2008 | |||
| US 2013070239 A1 21.03.2013. | |||

