Изобретение относится к способу генерации рекомендаций для действий водителя рельсового транспортного средства или управляющих сигналов для рельсового транспортного средства с помощью системы помощи водителю, в котором с учетом по меньшей мере одного задания для рейса вычисляются данные движения и на основе данных движения:
- генерируется рекомендация для действий и отображается на устройстве отображения рекомендаций для действий или
- генерируется управляющий сигнал, который действует на устройство управления транспортным средством.
Известно, что в полуавтоматическом режиме с рельсовыми транспортными средствами используют системы помощи водителю, которые основаны на вычислениях на модели. Эти вычисления на модели определяются на основе сохраненного профиля маршрута и желательного графика движения, каким образом рельсовое транспортное средство должно ускоряться и тормозиться перед поворотами пути, стрелками или пунктами остановки, чтобы при минимальном энергопотреблении оптимально поддерживать требования графика движения. При этом на практике оказалось, что системы помощи водителю по сравнению с транспортными средствами, управляемыми только водителем транспортного средства, могут сократить энергопотребление при том же времени движения в среднем на 20%.
В основе изобретения лежит задача предложить способ для генерации рекомендаций для действий водителя рельсового транспортного средства или управляющих сигналов для рельсового транспортного средства, посредством которого энергопотребление, особенно при высокоскоростных рейсах, может быть дополнительно снижено.
Для этого предложено, что в качестве задания для рейса учитывается по меньшей мере один параметр воздушного давления. За счет этого может учитываться по меньшей мере одна аэродинамическая составляющая в сопротивлении движению рельсового транспортного средства в вычислении данных движения для рекомендации для действия или управляющего сигнала, при этом связанный с текущим воздушным давлением параметр входит в вычисление на модели, на котором основывается определение данных движения. В отличие от традиционных способов помощи водителю, в которых аэродинамическая составляющая рассматривается в вычислениях на модели как постоянная, особенно при высокоскоростных рейсах (движениях на маршрутах) и больших перепадах высот вдоль маршрута, может достигаться повышенная экономия энергии. Под "высокоскоростным движением на маршруте" должно, в частности, пониматься движение, в котором достигается скорость более 200 км/ч, предпочтительно более 250 км/ч.
Под "заданием для рейса" должно, в частности, пониматься задание, которое характеризует движение рельсового транспортного средства вдоль маршрута движения по меньшей мере в один момент времени или в течение интервала времени или в по меньшей мере одной позиции вдоль маршрута движения или на отрезке маршрута. Задание для рейса может быть входным параметром вычисления на модели для определения данных движения, или оно может быть использовано для вывода такого входного параметра, например, так, что с входным параметром сопоставляется задание для рейса. Задание для рейса, которое уже учитывается в обычном способе помощи вождению, может быть свойством рельсового транспортного средства, таким как, например, состав, масса, размещение пассажиров, максимальная доступная мощность и т.д., или свойством маршрута, таким как, например, определенный профиль кривой, подъема или уклона, наличие или приближение к стрелке или туннелю, расстояние до пункта остановки, состояние сигнала, график движения и т.д. С учетом в соответствии с изобретением параметра воздушного давления в качестве задания движения может быть достигнуто предпочтительное уточнение уже существующих вычислений на модели.
Из "данных движения", которые используются для генерации рекомендации для действий или управляющего сигнала, могут быть выведены поддерживаемые для минимизации энергопотребления характеристики движения, такие как, в частности, скорость, ускорение, замедления, время остановки и т.д. Набор данных движения, который в качестве информационного содержания, в частности, содержит заданное изменение таких характеристик движения в зависимости от времени и/или от расстояния до начального пункта или места назначения, может также обозначаться как "график цикла движения". Данные движения могут быть вычислены с помощью вычислительного блока, который предпочтительно расположен на борту рельсового транспортного средства. Альтернативно или дополнительно данные движения могут быть вычислены с помощью вычислительного блока, который расположен удаленно от рельсового транспортного средства в стационарной вычислительной станции, при этом данные движения передаются на рельсовое транспортно средство.
Под "параметром воздушного давления" должна, в частности, пониматься физическая величина, с помощью которой может быть установлено соответствие значению воздушного давления. Параметр воздушного давления воздуха может быть сам по себе воздушным давлением или величиной, пропорциональной воздушному давлению, такой как, например, регистрируемый сенсорным блоком электрический параметр.
В соответствии с одним вариантом осуществления изобретения, посредством однократной регистрации или определения параметров воздушного давления перед проездом рельсового транспортного средства может быть создан профиль воздушного давления маршрута, который должен быть пройден, причем этот профиль используется для вычисления графика цикла движения для всего маршрута.
В другом предпочтительном варианте осуществления, для того чтобы предпочтительным образом адаптировать данные движения для оптимизации энергии к воздушному давлению, изменяющемуся вдоль маршрута, предложено, что параметр воздушного давления несколько раз регистрируется во время движения. В частности, параметр воздушного давления может регистрироваться непрерывно во время движения. "Движение" осуществляется рациональным образом вдоль маршрута, соединяющего заданный начальный пункт и заданное место назначения, который должен проходиться в соответствии с выдерживаемым графиком движения.
Кроме того, предлагается, что параметр воздушного давления регистрируется, и, в зависимости от зарегистрированного значения сохраненный в базе данных коэффициент используется в вычислении данных движения. Посредством соотнесения коэффициента с зарегистрированным значением параметра воздушного давления, причем коэффициент продолжительно хранится в блоке памяти, может быть реализовано особенно быстрое определение данных движения. Коэффициент, соотнесенный с зарегистрированным параметром воздушного давления, предпочтительно используют в качестве входного параметра вычисления на модели для определения данных движения, причем он представляет аэродинамическую составляющую сопротивления движению рельсового транспортного средства. При этом он выбирается в базе данных, которая хранится в блоке памяти и в которой коэффициенты сопоставлены со значениями параметра воздушного давления. Сохраненные коэффициенты предпочтительно вычисляются при разработке рельсового транспортного средства на основе его аэродинамических характеристик и для различных значений параметра воздушного давления. Если вычислительный блок для вычисления данных движения расположен на борту рельсового транспортного средства, то база данных предпочтительно также сохраняется на борту рельсового транспортного средства.
Параметр воздушного давления может, например, регистрироваться с помощью датчиков воздушного давления, расположенных в различных местах вдоль маршрута. Они могут быть компонентами расположенных в непосредственной близости от маршрута метеорологических станций. Регистрация параметра воздушного давления в произвольном положении вдоль маршрута, однако, может быть реализована, если параметр воздушного давления регистрируется с помощью сенсорного блока на борту рельсового транспортного средства. Такой сенсорный блок может включать в себя датчик давления и связанный с ним вычислительный блок, который служит тому, чтобы учитывать влияние скорости движения на зарегистрированное значение.
В качестве альтернативы или в дополнение к регистрации с помощью датчиков давления, параметр воздушного давления может быть зарегистрирован путем регистрации параметра высоты. Соответствие параметра высоты параметру воздушного давления может при этом устанавливаться посредством барометрической формулы. Параметр высоты может сам служить в качестве характеристики давления воздуха, тем что он непосредственно используется в качестве входного параметра вычисления на модели для определения данных движения или непосредственно соотносится с таким входным параметром, или в дополнение к параметру высоты может вычисляться отдельный параметр воздушного давления из параметра высоты.
Предпочтительным образом, параметр высоты выводится на основе информации местоположения. Она может регистрироваться с помощью блока определения местоположения, который расположен, в частности, на борту рельсового транспортного средства, и/или она может быть определена на основе сохраненных данных маршрута.
Кроме того, изобретение относится к системе помощи водителю для генерации рекомендаций для действий для водителя рельсового транспортного средства или управляющих сигналов для рельсового транспортного средства, содержащей вычислительный блок, который предусмотрен для вычисления данных движения с учетом по меньшей мере одного задания для рейса, и устройство отображения рекомендаций для действий для отображения рекомендации для действий, сгенерированной на основе данных движения, и/или устройство управления транспортным средством, на которое действует управляющий сигнал, сгенерированный на основании данных движения.
Для того чтобы такую систему помощи водителю выполнить таким образом, что энергопотребление, особенно при высокоскоростных рейсах, может дополнительно снижаться, предлагается, что вычислительный блок предусмотрен для того, чтобы в качестве задания для рейса учитывать по меньшей мере один параметр воздушного давления. С такой системой помощи водителю могут достигаться те же преимущества, что и описанные выше в связи с предлагаемым способом.
Вариант осуществления изобретения поясняется со ссылкой на чертежи, на которых показано следующее:
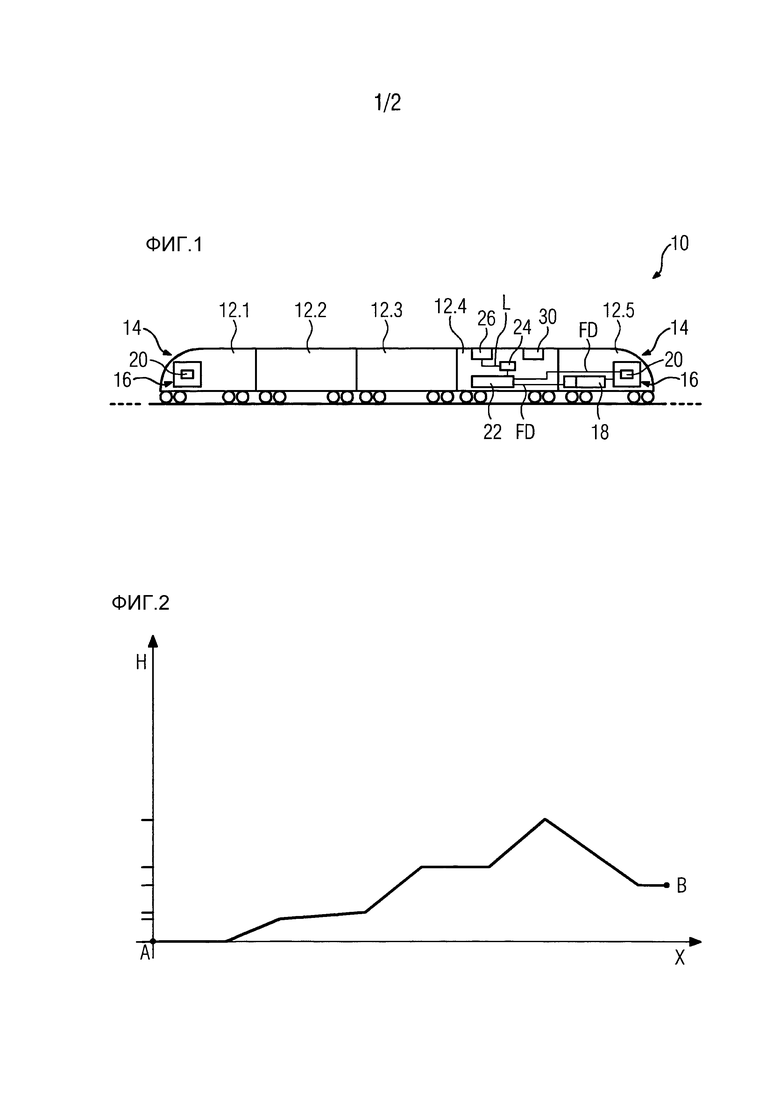
Фиг. 1 - рельсовое транспортное средство с системой помощи вождению,
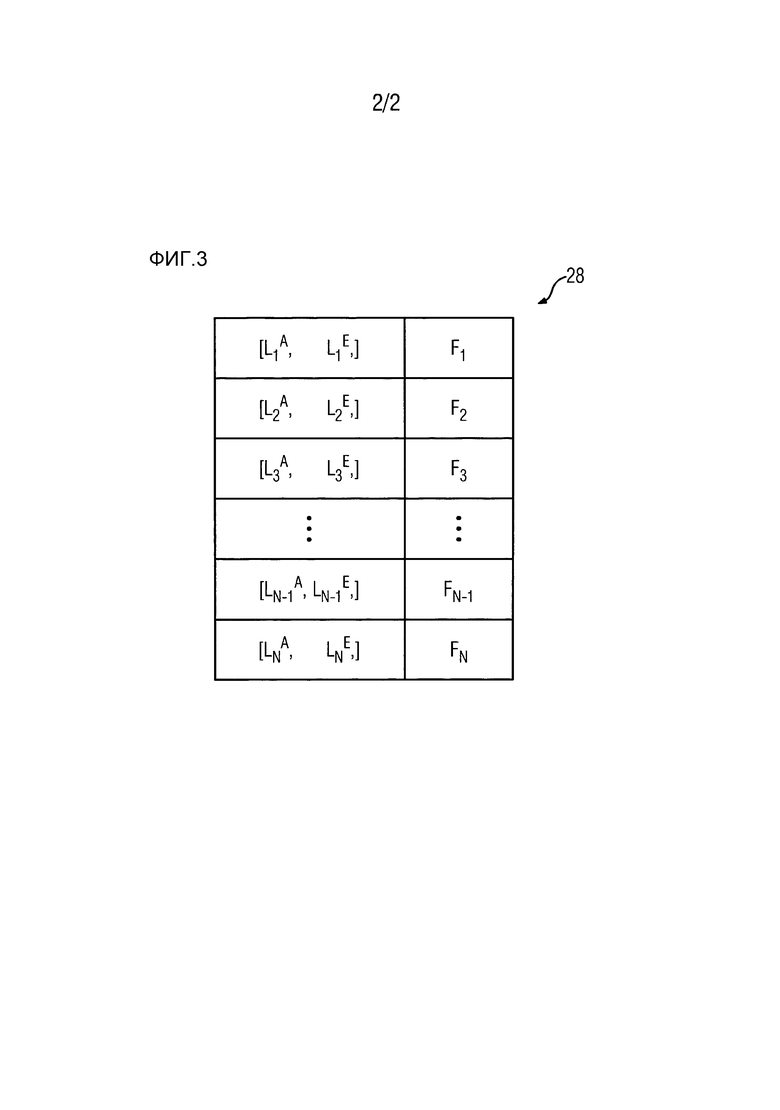
Фиг. 2 - профиль высоты маршрута, по которому следует рельсовое транспортное средство, и
Фиг. 3 - база данных, в которой со значениями параметра воздушного давления соотнесены коэффициенты вычисления для вычисления на модели системы помощи вождению.
На фиг. 1 показано рельсовое транспортное средство 10 на схематичном виде сбоку. Оно выполнено в виде мотор-вагонного поезда, который, в частности, предназначен для высокоскоростного режима. Он имеет множество соединенных вместе вагонов 12. Концевые вагоны 12.1 и 12.5, каждый, оснащены кабиной водителя 14, которая, соответственно, имеет блок 16 управления для машиниста мотор-вагонного поезда. С помощью блока 16 управления он может вводить команды движения для управления рельсовым транспортным средством 10. Для этого блок 16 управления оперативно соединен с устройством 18 управления транспортным средством.
Блок 16 управления имеет устройство 20 отображения рекомендации для действий, которое служит для отображения рекомендации для действий для машиниста мотор-вагонного поезда. Эта рекомендация для действий формируется на основе данных движения FD, которые определяются в вычислительном блоке 22 с учетом заданий для рейса. Рекомендация для действий может, в частности, быть рекомендуемой скоростью движения, ступенью тяги, ступенью торможения и т.д., причем информационное содержание вычисленных данных движения FD связано с этими параметрами движения.
Вычислительный блок 22 предназначен для того, чтобы данные движения FD вычислять на основе по меньшей мере одного вычисления на модели М. Это вычисление на модели М определяется по меньшей мере с учетом профиля S маршрута и желательного графика FP движения в качестве заданий для рейса, каким образом рельсовое транспортное средство 10 должно ускоряться и замедляться перед поворотами, стрелками или пунктами остановки, чтобы оптимальным образом поддерживать требования графика движения при минимальном энергопотреблении. Такое вычисление на модели M может, например, определять оптимизированное относительно энергопотребления ускорение а в зависимости от текущего положения х и скорости v рельсового транспортного средства 10 в соответствии с
а(х)=М(х, v(х), S(х), FP)
причем S(х) представляет собой условия маршрута на участке маршрута, исходящем из положения х, и FP представляет план движения. Данные маршрута профиля S маршрута или график движения FP, в частности, могут быть сохранены при оснащении рельсового транспортного средства 10 до отправления в начальном пункте в блоке 24 памяти, информационно-технически соединенном с вычислительным блоком 22. Ускорение а или основанная на этом параметре информации является тогда составной частью данных движения FD, которые передаются на устройство 20 отображения рекомендаций для действий.
Кроме того, управление рельсовым транспортным средством 10 может принимать на себя устройство 18 управления транспортным средством во время движения. В этом режиме действия, которые в нормальном режиме работы выполняются машинистом мотор-вагонного поезда, автоматически подтверждаются устройством 18 управления транспортным средством. В этом режиме управляющий сигнал, который генерируется на основе определенных вычислительным блоком 22 данных движения FD, воздействует на устройство 18 управления транспортным средством. За счет этого режим движения рельсового транспортного средства 10 может быть оптимизирован в автоматическом режиме управления по отношению к заданиям для рейса за счет того, что управляющие сигналы генерируются на основе определенного, оптимизированного по отношению к заданиям для рейса графика цикла движения, и выдаются на устройство 18 управления транспортным средством.
На фиг. 2 в форме двумерной диаграммы показан профиль маршрута, который предстоит пройти рельсовому транспортному средству 10 от начального пункта А до пункта назначения В. Горизонтальная ось представляет расстояние х от начальной точки А, а вертикальная ось соответствует высоте Н. Как можно видеть из профиля высоты, имеются существенные изменения в высоте Н вдоль маршрута и в соответствии с этим изменения воздушного давления, релевантные для динамики движения.
Вычислительный блок 22 предназначен для определения данных движения FD с учетом задания для рейса в форме параметра, относящегося к текущему воздушному давлению, также называемому параметром L воздушного давления.
В соответствии с первым вариантом регистрации, параметр L воздушного давления регистрируется посредством сенсорного блока 26, который расположен на борту рельсового транспортного средства 10 (см. фиг. 1). Сенсорный блок 26 включает в себя датчик давления, который регистрирует параметр для давления воздуха, окружающего рельсовое транспортное средство 10, и, при необходимости, вычислительный блок, который выводит параметр L воздушного давления из зарегистрированного значения с учетом текущей скорости v движения. Параметр L воздушного давления может регистрироваться непрерывно в течение всего рейса, за счет чего данные движения FD могут постоянно адаптироваться к непрерывно изменяющемуся воздушному давлению.
Зарегистрированный параметр L воздушного давления испытывает сильное влияние при движении рельсового транспортного средства 10 в туннеле. Поэтому целесообразно учитывать нахождение рельсового транспортного средства 10 в туннеле при регистрации параметра L воздушного давления. Это может, в частности, осуществляться на основе данных маршрута профиля S маршрута, которые при оснащении рельсового транспортного средства загружаются в начальном пункте А в блок памяти 24.
После регистрации параметра L воздушного давления он используется вычислительным блоком 22 при определении данных движения FD. Это осуществляется с помощью базы данных 28, показанной на фиг. 3, которая загружена в блок 24 памяти. С помощью этой базы данных 28 с зарегистрированным значением параметра L воздушного давления в определенном интервале [Li A, Li E] сопоставляется коэффициент Fi, который представляет аэродинамическую составляющую сопротивления движения в вычислении на модели М′. Это вычисление на модели М′, которое запрограммировано на основе формулы сопротивления движению, учитывает соответствующий параметру L воздушного давления коэффициент Fi при определении данных движения FD. Возвращаясь к приведенному выше примеру рекомендованного, оптимизированного с точки зрения энергопотребления ускорения а в положении х, определение ускорения может быть схематично выражено как
а(х)=М′(х, v(х), S(х), FP, Fi(х))
причем Fi(х) является коэффициентом, который соотнесен с параметром L(х) воздушного давления в положении х.
База данных 28 создается во время изготовления рельсового транспортного средства 10 на основе аэродинамических характеристик рельсового транспортного средства 10 и постоянно хранится в блоке 24 памяти.
В соответствии со вторым вариантом регистрации, параметр L воздушного давления может регистрироваться посредством регистрации параметра Н высоты, причем связь между обоими параметрами L и Н может устанавливаться посредством барометрической формулы высоты. Параметр высоты Н может определяться, в частности, из информации о местоположении расположенного на борту рельсового транспортного средства 10 блока 30 определения местоположения. Например, блок 30 определения местоположения может быть выполнен с возможностью приема сигналов GPS. Альтернативно или дополнительно, параметр Н высоты может быть получен из известных данных маршрута профиля S маршрута.
В показанном варианте осуществления вычислительный блок 22 и сенсорный блок 26 расположены на борту рельсового транспортного средства 10. В других вариантах возможно, что вычислительный блок 22 расположен удаленно от транспортного средства в стационарной вычислительной станции, причем определенные данные движения FD передаются к рельсовому транспортному средству 10, и/или что сенсорный блок 26 выполнен как стационарный, расположенный вдоль маршрута блок, например, как часть метеорологической станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ СОВЕТЧИК ДЛЯ ВОДИТЕЛЕЙ | 2024 |
|
RU2831868C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| УСТРОЙСТВО ПОМОЩИ ВОДИТЕЛЮ | 2018 |
|
RU2702927C1 |
| АВТОМАТИЗИРОВАННАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2019 |
|
RU2764078C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ, ВКЛЮЧАЮЩЕЙ В СЕБЯ ПРОГНОЗИРОВАНИЕ УСТАЛОСТИ ВОДИТЕЛЯ | 2012 |
|
RU2561657C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И РЕГИСТРАТОР ПАРАМЕТРОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2333537C1 |
| Способ эксплуатации системы помощи водителю и транспортного средства | 2018 |
|
RU2763904C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ САМОСВАЛА С ПОМОЩЬЮ ЦИФРОВОГО СОВЕТЧИКА ВОДИТЕЛЮ | 2021 |
|
RU2774512C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕДСТВ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2631752C2 |
Техническое решение относится к области железнодорожной автоматики и телемеханики. В способе с учетом по меньшей мере одного задания для рейса вычисляют данные движения (FD) и на основе данных движения (FD) генерируют рекомендацию для действий и отображают на устройстве отображения рекомендаций для действий, или генерируют управляющий сигнал, который действует на устройство (18) управления транспортным средством, а в качестве задания для рейса учитывают по меньшей мере один параметр (L) воздушного давления. Причем параметр (L) воздушного давления регистрируют и в зависимости от зарегистрированного значения используют сохраненный в базе данных (28) коэффициент (F) в вычислении данных движения (FD). 5 н. и 6 з.п. ф-лы, 3 ил.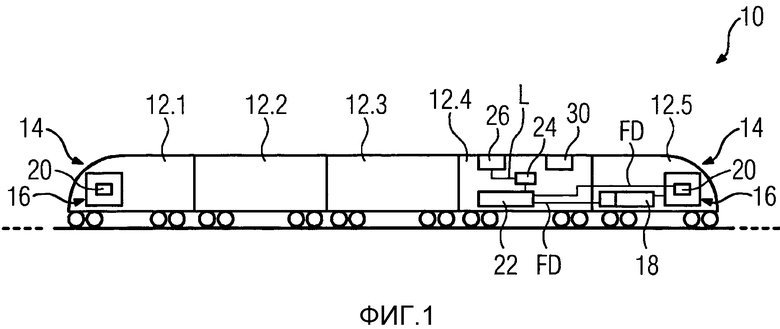
1. Способ генерации рекомендаций для действий водителя рельсового транспортного средства (10) или управляющих сигналов для рельсового транспортного средства (10) с помощью системы помощи водителю, в котором с учетом по меньшей мере одного задания для рейса вычисляют данные движения (FD) и на основе данных движения (FD):
- генерируют рекомендацию для действий и отображают на устройстве отображения рекомендаций для действий, или
- генерируют управляющий сигнал, который действует на устройство (18) управления транспортным средством, отличающийся тем, что в качестве задания для рейса учитывают по меньшей мере один параметр (L) воздушного давления, причем параметр (L) воздушного давления регистрируют и в зависимости от зарегистрированного значения используют сохраненный в базе данных (28) коэффициент (F) в вычислении данных движения (FD).
2. Способ по п. 1, отличающийся тем, что параметр (L) воздушного давления регистрируют многократно в течение движения.
3. Способ по п. 1 или 2, отличающийся тем, что параметр (L) воздушного давления регистрируют с помощью сенсорного блока (26) на борту рельсового транспортного средства (10).
4. Способ по п. 1 или 2, отличающийся тем, что параметр (L) воздушного давления регистрируют посредством регистрации параметра (Н) высоты.
5. Способ по п. 4, отличающийся тем, что параметр (Н) высоты выводят на основе информации местоположения.
6. Способ по п. 5, отличающийся тем, что информацию местоположения регистрируют посредством блока (30) определения местоположения.
7. Способ по п. 5, отличающийся тем, что информацию местоположения определяют на основе сохраненных данных маршрута.
8. Система помощи водителю для генерации рекомендаций для действий для водителя рельсового транспортного средства (10) или управляющих сигналов для рельсового транспортного средства (10), содержащая вычислительный блок (22), который предусмотрен для вычисления данных движения (FD) с учетом по меньшей мере одного задания для рейса, и устройство (20) отображения рекомендаций для действий для отображения рекомендации для действий, сгенерированной на основе данных движения (FD), и/или устройство (18) управления транспортным средством, на которое действует управляющий сигнал, сгенерированный на основании данных управления (FD), отличающаяся тем, что предусмотрен вычислительный блок (22) для того, чтобы в качестве задания для рейса учитывать по меньшей мере один параметр (L) воздушного давления, причем для регистрации параметра (L) воздушного давления предусмотрен сенсорный блок (26) на борту рельсового транспортного средства (10), причем вычислительный блок (22) в зависимости от зарегистрированного значения параметра (L) воздушного давления использует сохраненный в базе данных (28) коэффициент (F) в вычислении данных движения (FD).
9. Рельсовое транспортное средство с системой помощи водителю по п. 8.
10. Система помощи водителю для генерации рекомендаций для действий для водителя рельсового транспортного средства (10) или управляющих сигналов для рельсового транспортного средства (10), содержащая вычислительный блок (22), который предусмотрен для вычисления данных движения (FD) с учетом по меньшей мере одного задания для рейса, и устройство (20) отображения рекомендаций для действий для отображения рекомендации для действий, сгенерированной на основе данных движения (FD), и/или устройство (18) управления транспортным средством, на которое действует управляющий сигнал, сгенерированный на основании данных управления (FD), отличающаяся тем, что предусмотрен вычислительный блок (22) для того, чтобы в качестве задания для рейса учитывать по меньшей мере один параметр (L) воздушного давления, причем для регистрации параметра (L) воздушного давления предусмотрен блок (30) определения местоположения, а параметр (L) воздушного давления регистрируют посредством регистрации параметра (Н) высоты на основе информации местоположения, причем вычислительный блок (22) в зависимости от зарегистрированного значения параметра (L) воздушного давления использует сохраненный в базе данных (28) коэффициент (F) в вычислении данных движения (FD).
11. Рельсовое транспортное средство с системой помощи водителю по п. 10.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙ ПРИ РАБОТЕ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2306255C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

