Изобретение относится к средствам пассивной безопасности наземных транспортных средств, работающих в условиях интенсивного движения.
В настоящее время движение наземного транспорта внутри больших городов и на междугородних трассах характеризуется высокой интенсивностью с практически непрерывностью со значительной плотностью потока и скоростями. В таких условиях, как показывает статистика дорожно-транспортных происшествий /ДТП/, практически четверть столкновений двух автомобилей сопровождается серией групповых массовых последовательных столкновений нескольких автомобилей, движущихся в продольном направлении друг за другом. При этом каждое конкретное из участников ДТП транспортное средство испытывает в большинстве случаев два последовательных фронтальных импульсных разнонаправленных удара спереди и сзади, либо, наоборот, сзади и спереди, происходящих с некоторым сдвигом по времени и вызывающих, соответственно, два последовательных импульсных инерционных разнонаправленных перемещений водителя и всех пассажиров вперед и назад, либо назад и вперед с нарастающей амплитудой вследствие процесса параметрической раскачки, представляющих огромную опасность с точки зрения возможности получения водителем и пассажирами серьезных травм.
Известны способы повышения безопасности транспортных средств, заключающиеся в том, что с помощью установленного на раме аварийного тормозного механизма с силовым приводом вводят в контакт с дорожным полотном, либо внедряют в полотно шток, связанный с пиропатроном, снабженным электрозапалом /см. патент РФ на изобретение № 2274566, кл. В60Τ 1/14, 2004 [1]; патент РФ на изобретение № 2276021, кл. В60Τ 1/14, 2004 [2]/; либо вакуумный прижим, сообщаемый с эжекторным насосом /см. патент РФ на полезную модель № 103784, кл. В60Τ 1/14, 2009 [3]/, либо тормозной клин с системой его подвески, снабженной рабочими барабанами с гибкими тросами, тормозной колодкой и ручной лебедкой /см. патент РФ на изобретение № 2286895, кл. B60Τ 1/14, 2005 [4]/.
Недостатками известных способов повышения безопасности являются предельная сложность используемых для реализации устройств, низкая надежность, ограниченные возможности применения.
Кроме того, известны способы повышения безопасности транспортных средств путем создания дополнительной тормозной силы, прижимающей колеса к дорожному полотну при помощи, например, принудительного изменения положения центра тяжести транспортного средства относительно дорожного полотна /см. патент РФ на изобретение № 2279991, кл. В60Τ 1/04, 2006 [5]/.
Недостатками таких способов являются сложность их реализации и низкая эффективность повышения безопасности.
Известны также способы повышения безопасности транспортных средств, заключающиеся в распознавании опасных ситуаций на дороге, в частности опасных сближений с объектом, с помощью радарных датчиков и видеокамер, и предупреждении столкновений путем автоматического торможения с расчетным значением необходимого тормозного усилия /см. сайт: http://www.XC 60-club.ru/obzory-i-testy/collis-warn/ [6]; сайт: http://gm-avto.ucoz.ru/publ. /3-1-0-4 [7]/.
Согласно ряду способов с помощью датчиков электронных систем отслеживают дистанцию до препятствия перед автомобилем и при ее критическом уменьшении активизируют исполнительные устройства активной и пассивной безопасности, подают сигнал водителю, включают принудительное торможение, натягивают преднатяжители ремней безопасности, надувают подушки безопасности, ужесточают амортизационные подвески и т.п. /см. ЕР 0856433 A1, заявлено 05.08.1998 [8]/.
Известны также способы повышения безопасности с помощью систем адаптивного круиз-контроля /АКК/, Αdaptive Cruise Control, АСС, запрограммированных на выбор безопасных расстояний между транспортными средствами, в случае невозможности предотвращения столкновений-подготовке автомобилей к удару /см. Ремонт и обслуживание автомобилей для чайников, 2-е изд., Д. Скляр, Диалектика, M., Санкт-Петербург, Киев, 2014, стр. 382 [9]/, а также системы раннего оповещения о возможности столкновения Distronic, создающих защитное пространство вокруг движущегося автомобиля и включающих при опасности столкновения систему экстренного торможения /см. Основы конструкции современного автомобиля. Учебник для втузов. Иванов A.М. и др., 2012, стр. 307 [10]/.
Недостатками всех известных способов являются сравнительно низкая эффективность повышения безопасности, практическая невозможность обеспечения с большой вероятностью предотвращения столкновения транспортного средства с препятствием, предельная сложность используемых систем предупреждения столкновений, отсутствие активных методов, облегчающих последствия ударов при невозможности их предотвращения.
Наиболее близким способом того же назначения к предлагаемому изобретению по совокупности существенных признаков является способ повышения безопасности транспортного средства, включающий измерение дистанции до препятствия спереди от транспортного средства с помощью датчиков дистанции, расчет с помощью электронного блока относительной скорости их сближения и оценку вероятности столкновения с препятствием, а также при большой опасности и неизбежности столкновения выполнение исполнительными устройствами, связанными с электронным блоком и действующими на ведущие колеса органами управления движением и торможением, заданной последовательности операций по экстренному торможению транспортного средства и подъему передней части его кузова относительно дороги /см. патент РФ на изобретение № 2257303, кл. B60R 21/02, 2003 [11]/, и принятый за прототип.
Известный способ не позволяет предотвратить неизбежное столкновение транспортного средства с подвижным или неподвижным препятствием, однако позволяет максимально возможно облегчить последствия столкновения за счет принудительного подъема в момент удара передней части кузова для переноса энергии, удара на силовые элементы, рассчитанные на принятие ударной нагрузки.
Недостатками способа-прототипа являются ограниченные возможности и предельная сложность реализации, низкая эффективность повышения безопасности в условиях интенсивного движения за счет силового подъема передней части кузова, а также невозможность активного динамического воздействия непосредственно на водителя и пассажиров в момент ударного столкновения.
Сущность изобретения заключается в создании простого и универсального способа, позволяющего эффективно повысить безопасность водителя и пассажиров транспортного средства в условиях высокой интенсивности движения за счет взаимного гашения сообщаемой при ДТП кинетической энергии ударов противоположного направления путем формирования прикладываемых при ударах к водителю и пассажирам встречных инерционных воздействий.
Технический результат - повышение степени безопасности водителя и пассажиров в условиях высокой интенсивности движения, упрощение реализации способа и расширение возможностей его использования.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе повышения безопасности транспортного средства при групповых последовательных продольных столкновениях, включающем измерение дистанции до препятствия спереди от транспортного средства, расчет относительной скорости их сближения и оценку вероятности столкновения с препятствием, а также при практической неизбежности столкновения выполнение исполнительными устройствами, связанными с органами управления движением и торможением, заданной системы операций, направленных на облегчение последствий столкновения, особенность заключается в том, что дополнительно измеряют дистанцию до препятствия сзади от транспортного средства, аналогичным вышеуказанному образом оценивают вероятность их столкновения, и в случае практической неизбежности обоих столкновений с помощью системы операций вышеуказанных исполнительных устройств достигают синхронности по времени столкновений спереди и сзади транспортного средства, обеспечивающих эффект динамического гашения двух инерционных ударных воздействий, прикладываемых к водителю и пассажирам одновременно во встречных направлениях, при этом в зависимости от положения и характера движения препятствий спереди и сзади относительно транспортного средства достижение синхронности соударений по времени обеспечивают либо изменением величины скорости транспортного средства, либо его полной остановкой с последующим приведением в движение назад, либо при нахождении транспортного средства в покое с работающим двигателем приведением его в движение вперед или назад с заданной скоростью.
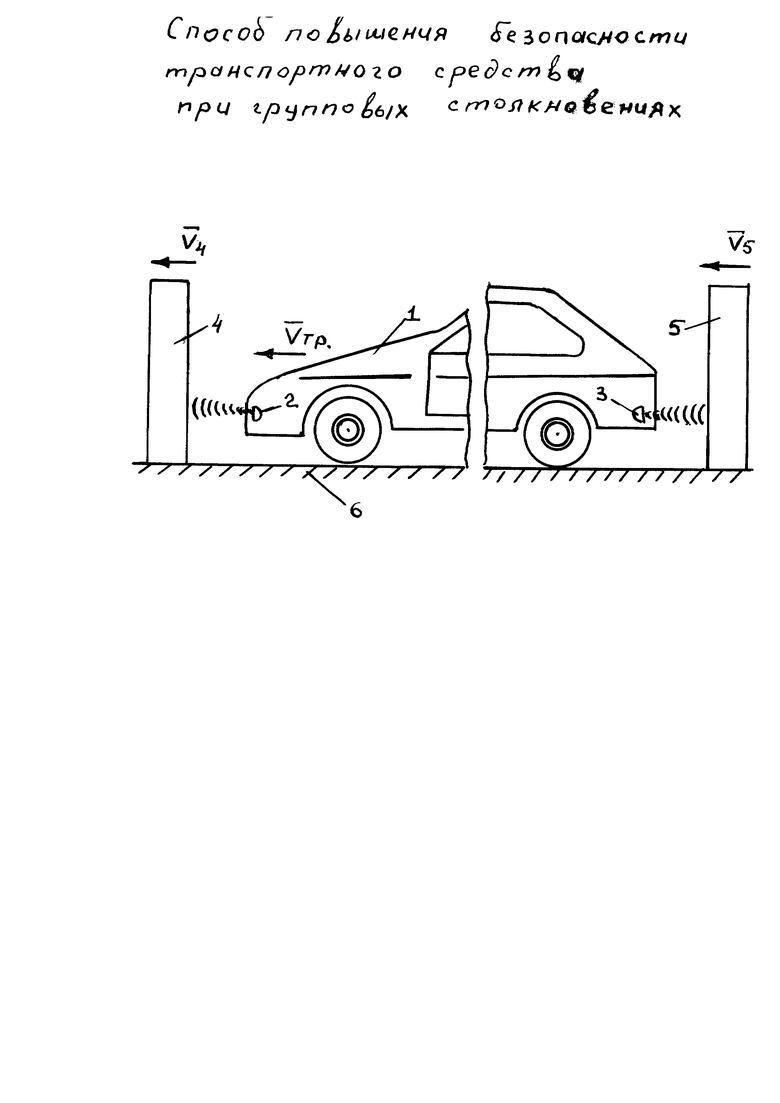
Сущность изобретения поясняется чертежом, где схематично изображено одно из транспортных средств, имеющее препятствия спереди и сзади и снабженное устройством для реализации предложенного способа.
Устройство содержит размещенные в передней и задней частях транспортного средства 1 соответственно датчики 2 и 3 дистанции до препятствий спереди 4 и сзади 5 транспортного средства 1, расположенных в продольном направлении вдоль дорожного полотна 6, причем могут быть использованы датчики 2 и 3 как радиолокационного, так и лазерного типов /см. [11]/. При этом датчики 2 и 3 подключены к электронному программируемому блоку /на рисунке не показан/, рассчитывающему на основании сигналов, снимаемых с датчиков 2 и 3, дистанции до препятствий 4 и 5, относительные скорости сближения транспортного средства 1 с препятствиями 4 и 5, и оценивающему вероятность столкновений с последними. В случае большой опасности, то есть практической неизбежности обоих столкновений, электронный блок запрограммирован на выдачу исполнительным устройствам, связанным с действующими на ведущие колеса органами управления движением и торможения транспортного средства, заданной последовательности команд на выполнение вышеуказанными исполнительными устройствами системы операций: изменение величины скорости, остановка с последующим движением назад, приведение в движение вперед или назад из состояния покоя с заданной скоростью, обеспечивающих синхронизацию по времени столкновений транспортного средства с препятствиями спереди 4 и сзади 5.
Реализацию предложенного способа с помощью вышеописанного устройства осуществляют следующим образом.
Измеряют дистанции транспортного средства 1 до препятствий 4 спереди и 5 сзади с помощью соответственно датчиков 2 и 3 дистанции до препятствия, рассчитывают по сигналу датчиков 2 и 3 с помощью электронного программируемого блока относительные скорости сближения транспортного средства 1 и оценивают его вероятности столкновений с препятствиями 4 и 5. В случае большой вероятности, то есть практической неизбежности обоих столкновений, формируют в программируемом электронном блоке и выдают исполнительным устройствам, связанным с действующими на ведущие колеса органами управления движением и торможением, заданную последовательность команд. В соответствии с этими командами вышеуказанные исполнительные устройства производят над органами управления движением и торможением систему операций, в результате которых достигают синхронности по времени обоих столкновений транспортного средства 1, обеспечивающих эффект динамического гашения двух инерционных ударных воздействий, прикладываемых к водителю и пассажирам одновременно во встречных направлениях. При этом, в зависимости от положения и характера движения препятствий 4 и 5 спереди и сзади от транспортного средства 1 достижение синхронности обоих соударений по времени обеспечивают либо изменением величины скорости транспортного средства 1, либо его полной остановкой с последующим приведением в движение назад, либо, при нахождении транспортного средства 1 в покое с работающим двигателем, приведением его в движение вперед или назад с заданной скоростью. При ударе транспортного средства 1 о впереди расположенное препятствие 1 водителю и пассажирам сообщается инерционное силовое воздействие, направленное вперед. Если одновременно с этим, то есть синхронно обеспечить столкновение транспортного средства 1 с препятствием сзади, то к водителю и пассажирам будет синхронно прикладываться силовое инерционное воздействие, направленное назад. В результате будет реализован эффект динамического гашения кинетическими энергиями встречных ударов одного направления друг друга, что позволит максимально эффективно повысить безопасность водителя и пассажиров при мощных высокоэнергетических групповых фронтальных столкновениях транспортных средств. Главным достоинством такого гашения является то, что здесь за счет необходимого умышленного сдвига по времени действующих на транспортное средство ударов спереди и сзади для гашения кинетической энергии удара при ДТП используется не какая либо, сосредоточенная /запасенная/ в транспортном средстве энергия/механическая, электрическая, магнитная и т.п./, а именно кинетическая энергия другого внешнего удара. Именно это достоинство позволит предельно повысить КПД устройства, обеспечивает максимально возможное упрощение как самого процесса осуществления способа, так и устройства для его реализации, а также максимальную эффективность повышения безопасности.
Проиллюстрируем с помощью рисунка характер операций исполнительных устройств для достижения синхронности столкновений транспортного средства спереди и сзади, при некоторых различных режимах движения транспортного средства 1 и препятствий 4 и 5. При этом движение влево на рисунке транспортного средства 1 со скоростью 




По мнению заявителей, предложенный способ повышения безопасности достаточно прост, эффективен и может найти применение при эксплуатации транспортных средств в условиях интенсивного движения при высокой плотности автомобильного потока.
Изобретение относится к средствам пассивной безопасности наземных транспортных средств, работающих в условиях интенсивного движения. Способ заключается в том, что измеряют дистанцию до препятствий спереди и сзади транспортного средства, рассчитывают скорость их сближения, оценивают вероятность столкновений и при практической неизбежности обоих столкновений с помощью системы операций исполнительных устройств, связанных с органами управления движения и торможением транспортного средства, достигают синхронности двух столкновений спереди и сзади, обеспечивающих эффект динамического гашения кинетических энергии удара. Обеспечивается повышение степени безопасности водителя и пассажиров в условиях высокой интенсивности движения. 1 ил.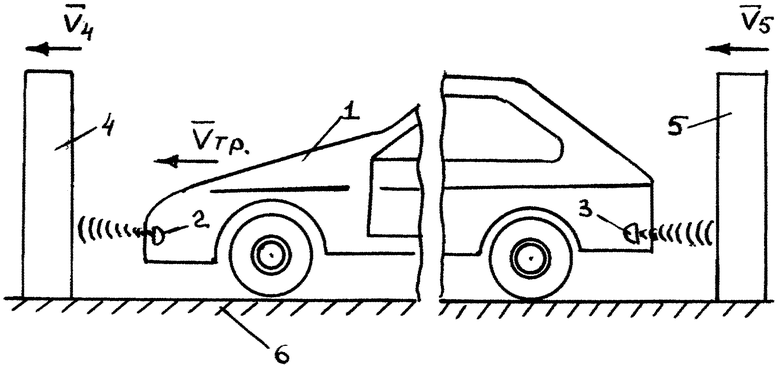
Способ повышения безопасности транспортного средства при групповых последовательных продольных столкновениях, включающий измерение дистанции до препятствия спереди от транспортного средства, расчет относительной скорости их сближения и оценку вероятности столкновения с препятствием, а также при практической неизбежности столкновения выполнение исполнительными устройствами, связанными с органами управления движением и торможением, заданной системы операций, направленных на облегчение последствий столкновения, отличающийся тем, что дополнительно измеряют дистанцию до препятствия сзади от транспортного средства, аналогичным вышеуказанному образом оценивают вероятность их столкновения и в случае практической неизбежности обоих столкновений с помощью системы операций вышеуказанных исполнительных устройств достигают синхронности по времени столкновений спереди и сзади транспортного средства, обеспечивающих эффект динамического гашения двух инерционных ударных воздействий, прикладываемых к водителю и пассажирам одновременно во встречных направлениях, при этом в зависимости от положения и характера движения препятствий спереди и сзади относительно транспортного средства достижение синхронности соударений по времени обеспечивают либо изменением величины скорости транспортного средства, либо его полной остановкой с последующим приведением в движение назад, либо при нахождении транспортного средства в покое с работающим двигателем приведением его в движение вперед или назад с заданной скоростью.
| БЕЗОПАСНЫЙ ЛЕГКОВОЙ АВТОМОБИЛЬ | 2003 |
|
RU2257303C1 |
| Способ автоматического обеспе-чЕНия бЕзОпАСНОй диСТАНции МЕждудВижущиМиСя ТРАНСпОРТНыМиСРЕдСТВАМи | 1976 |
|
SU794574A1 |
| Машина для уборки открытых площадок | 1976 |
|
SU856433A1 |

