Изобретение относится к станкостроению, а именно к манипуляторам, предназначенным для использования в прецизионных станках и измерительных машинах.
Известно обрабатывающее устройство (см. авторское свидетельство СССР №1296401, МПК B25J 11/00, опубл. 15.03.1987), содержащее основание, поворотную платформу с инструментальной головкой, шесть приводов с поступательным перемещением выходных элементов. Корпуса приводов шарнирно связаны с основанием, а выходные элементы шарнирно связаны с платформой, оси указанных приводов расположены попарно параллельно в трех плоскостях.
Недостатком устройства является попарно-параллельное расположение шарниров, которое влечет высокую погрешность позиционирования инструментальной головки.
Известно устройство для перемещения исполнительного органа (см. авторское свидетельство СССР №1224137, МПК B25J 9/12, опубликовано 15.04.1986), содержащее основание, платформу для размещения исполнительного органа и шесть приводов линейного перемещения, корпуса которых шарнирно закреплены на основании, а концы их выходных звеньев - на платформе.
Однако расположение шарниров устройства не позволяет добиться низкой погрешности позиционирования исполнительного органа.
Наиболее близким по технической сущности к предлагаемому изобретению является выбранное в качестве прототипа устройство для перемещения исполнительного органа (см. авторское свидетельство СССР №1142271, МПК B25J 11/00, опубл. 28.02.1985), содержащее платформу для размещения исполнительного органа, шесть тяг, шарнирно закрепленных на платформе, каждая из которых снабжена приводом ее продольного перемещения, корпус каждого привода шарнирно закреплен на основании, а тяги расположены попарно параллельно в трех различных плоскостях.
Недостатком устройства является расположение шарниров на платформе и на основании на одинаковом удалении друг от друга, что влечет высокую погрешность позиционирования исполнительного органа.
Задачей заявляемого изобретения является выполнение схемы шестиосевой системы позиционирования платформы относительно базовой рамы обрабатывающего станка или измерительной машины, позволяющей перемещать и вращать платформу в пределах рабочей зоны машины с минимальной погрешностью.
Технический результат заключается в повышении точности позиционирования исполнительного органа, размещенного на платформе.
Указанный технический результат достигается тем, что устройство для позиционирования исполнительного органа внутри рабочей зоны содержит базовую раму, снабженную шестью шарнирами, платформу для размещения исполнительного органа с рабочей точкой, снабженную шестью шарнирами, шесть стержней переменной длины, каждый из которых одним концом прикреплен к шарниру рамы, а другим - к шарниру платформы, согласно решению шарниры на базовой раме и на платформе размещены попарно в трех вершинах равносторонних треугольников, при этом стержни переменной длины соединяют шарниры платформы из одной вершины с шарнирами базовой рамы из разных вершин, а центр рабочей зоны размещен в местоположении рабочей точки исполнительного органа, при котором минимальна сумма скалярных произведений единичных векторов, совпадающих с линиями, проходящими вдоль стержней переменной длины от центров шарниров на базовой раме к центрам соответствующих шарниров на платформе.
Изобретение поясняется чертежом. Позициями на чертеже обозначены:
1 - рама;
2 - шарнир рамы;
3 - стержень;
4 - платформа;
5 - шарнир платформы;
6 - исполнительный орган;
7 - рабочая зона;
8 - рабочая точка.
Заявляемое устройство предназначено для позиционирования исполнительного органа 6 внутри рабочей зоны 7. Устройство содержит базовую раму 1, снабженную шестью шарнирами 2, размещенными попарно в трех вершинах равностороннего треугольника. Устройство содержит платформу 4, снабженную шестью шарнирами 5, размещенными попарно в трех вершинах равностороннего треугольника. На платформе 4 размещен исполнительный орган с рабочей точкой, например щуп для измерений или фреза для обработки. Рама 1 и платформа 4 соединены между собой шестью стержнями 3 переменной длины, каждый из которых одним концом прикреплен к шарниру 2 рамы, а другим - к шарниру 5 платформы, при этом стержни переменной длины соединяют шарниры платформы из одной вершины с шарнирами базовой рамы из разных вершин. Стержень переменной длины может быть выполнен различным образом, например представлять собой гидроцилиндр со штоком, снабженный гидроприводом, либо зубчатую рейку с шестерней, снабженной электроприводом и закрепленной в каретке. Стержни 3 предназначены для такого перемещения и вращения платформы 4 относительно базовой рамы 1, при котором рабочая точка 8 исполнительного органа 6 будет перемещаться в пределах рабочей зоны 7.
Центр рабочей зоны 7 размещен в местоположении рабочей точки 8 исполнительного органа 6, при котором минимальна сумма скалярных произведений единичных векторов, совпадающих с линиями, проходящими вдоль стержней 3 переменной длины от центров шарниров 2 на базовой раме 1 к центрам соответствующих шарниров 5 на платформе 4. При таком расположении рабочей зоны в ее центре достигается минимально возможная погрешность позиционирования рабочей точки. Чем дальше отклонение рабочей точки от центра рабочей зоны, тем ниже становится точность позиционирования исполнительного органа, поэтому границы рабочей зоны устанавливают на таком удалении от центра, на котором погрешность позиционирования исполнительного органа является максимально допустимой.
Положение платформы в описанной конструкции определяется расположением шарниров на раме и шарниров на платформе, а также шестью расстояниями между соответствующими парами точечных шарниров 2 и 5. Шесть таких расстояний в работающем устройстве однозначно определяют пространственное положение платформы с рабочим органом относительно базовой рамы.
Критерием для получения минимальной погрешности позиционирования, при прочих равных условиях, является выполнение следующих условий: центр рабочей зоны устройства находится в точке, где сумма скалярных произведений всех возможных единичных пар векторов минимальна, а взаимные размеры между шарнирами на платформе и основании и переменные расстояния во всей рабочей зоне устройства минимально увеличивают сумму скалярных произведений векторов. Положение единичных векторов совпадает с линиями, проходящими от центров шарниров на раме к центрам соответствующих шарниров на платформе. Всего таких векторов получается 6 по числу осей стержней.
При построении машины этот критерий используется следующим образом. Шарниры 2 на раме и шарниры 5 на платформе надо расположить в зависимости от размера рабочей зоны. Затем строится реально выполнимый диапазон переменных расстояний (min(Li), max(Li)) для обеспечения работы в выбранной зоне, где Li - длина i-ого стержня 3, i=[1..6]. После чего рассчитывается сумма скалярных произведений по формуле:

где k - искомый параметр критерия; x, y, z - соответствующие компоненты векторов L1=(x1;y1;z1), L2=(x2;y2;z2), L3=(x3;y3;z3), L4=(x4;y4;z4), L5=(x5;y5;z5). L6=(x6;y6;z6).
Проведя оптимизацию (выбор вариантов) взаимного расположения шарниров, выбирают такой вариант конструкции, при котором сумма скалярных произведений векторов минимальна.
Так в координатно-измерительной машине КИМ-750 шарниры на раме расположены следующим образом: расстояния между ближайшими парами шарниров 2 равны 260 мм, расстояния между ближайшими парами шарниров 5 равны 33 мм, при расположении рабочей точки 8 в центре рабочей зоны 7 расстояния L1, L2, L3, L4, L5, L6 равны 854 мм, причем расстояние между плоскостью, проходящей через шарниры на раме, и плоскостью, проходящей через шарниры на платформе, равно 646 мм. При этом сумма скалярных произведений равна k=7,071927, что допускает погрешность положения центра платформы не более 1,76 от погрешности на линейных измерителях. Такое построение получено оптимизацией, т.е. математическим подбором расположения шарниров с минимальной ошибкой в реализуемой конструкции.
Попытка смещения шарниров в этом устройстве (при решении этой конкретной задачи) только ухудшит результат. Полнокровная оптимизация определила минимум, и отклонения могут дать только увеличение ошибки. Например, если расположить шарниры по-другому, увеличив вышеназванные расстояния между шарнирами в 2 раза, сумма скалярных произведений увеличится и будет равна k=7,220972.
Всегда в погрешность положения платформы 4 входит погрешность определения длины стержней 3. Для получения нужного заданного положения платформы рассчитываются выполняемые расчетные длины стержней. Ошибка выполнения длин порождает ошибку положения платформы с ее рабочей точкой. Путем матанализа замечена закономерность, что чем меньше сумма скалярных произведений единичных векторов, тем меньше ошибка в положении платформы.
Это легко видеть в практике. Если все шесть стержней параллельны, то положение платформы вовсе не определено. Она будет качаться, как качели, на 6 стержнях, при этом сумма скалярных произведений максимальна, т.к. косинус угла 0 градусов равен 1. И наоборот, если 6 стержней в трехмерном пространстве максимально ортогональны между собой, сумма скалярных произведений минимальна, т.к. косинус угла 90 градусов равен 0, а положение платформы устойчиво.
Реальное использование заявленного изобретения происходит следующим образом.
1. Если шестиосевая машина, в которой используется заявленная система позиционирования, уже сконструирована (создана), то путем расчета суммы скалярных произведений для этой машины определяют рабочую зону, в которой погрешность удовлетворяет условиям эксплуатации.
2. Если задана рабочая зона и необходимая погрешность, то конструируют (создают) шестиосевую машину с платформой и рамой, удовлетворяющую заданию. Машина, построенная на основе заявленного изобретения, будет наименьших габаритов для выполнения этого задания.
Данный технический результат помогает спроектировать оптимальное устройство путем выполнения реально исполнимых вариантов построения измерительной или обрабатывающей машины с минимальными затратами для достижения наилучшей точности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ СИСТЕМЫ КООРДИНАТ В РАБОЧЕЙ ЗОНЕ КООРДИНАТНО-ИЗМЕРИТЕЛЬНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2164338C2 |
| МЕТАЛЛОРЕЖУЩИЙ ГЕКСАПОДНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР И ГЕКСАПОДНЫЙ МЕХАНИЗМ ДЛЯ НЕГО | 2005 |
|
RU2299797C2 |
| ШЕСТИОСЕВАЯ КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА И СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНОГО НАКОНЕЧНИКА ДЛЯ НЕЕ | 2007 |
|
RU2345884C1 |
| ОБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2084326C1 |
| ПРЕЦИЗИОННОЕ УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО ОРГАНА МАШИНЫ | 1992 |
|
RU2008197C1 |
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ДВИЖЕНИЯ | 1998 |
|
RU2244961C2 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2016 |
|
RU2645979C2 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| СФЕРИЧЕСКИЙ ШАРНИР | 1991 |
|
RU2007631C1 |

Изобретение относится к станкостроению, а именно к манипуляторам, предназначенным для использования в прецизионных станках и измерительных машинах. Устройство для позиционирования исполнительного органа 6 внутри рабочей зоны 7 содержит базовую раму 1 и платформу 4 для размещения исполнительного органа 6 с рабочей точкой 8. Рама 1 и платформа 4 снабжены шестью шарнирами 2 и 5 соответственно, размещенными попарно в трех вершинах равносторонних треугольников. Устройство содержит шесть стержней 3 переменной длины, каждый из которых одним концом прикреплен к шарниру 2 рамы 1, а другим - к шарниру 5 платформы 4, при этом стержни 3 переменной длины соединяют шарниры платформы 4 из одной вершины с шарнирами базовой рамы 1 из разных вершин. Центр рабочей зоны 7 размещен в местоположении рабочей точки 8 исполнительного органа, при котором минимальна сумма скалярных произведений единичных векторов, совпадающих с линиями, проходящими вдоль стержней 3 переменной длины от центров шарниров 2 на базовой раме 1 к центрам соответствующих шарниров 5 на платформе 4. Технический результат заключается в повышении точности позиционирования исполнительного органа, размещенного на платформе. 1 ил.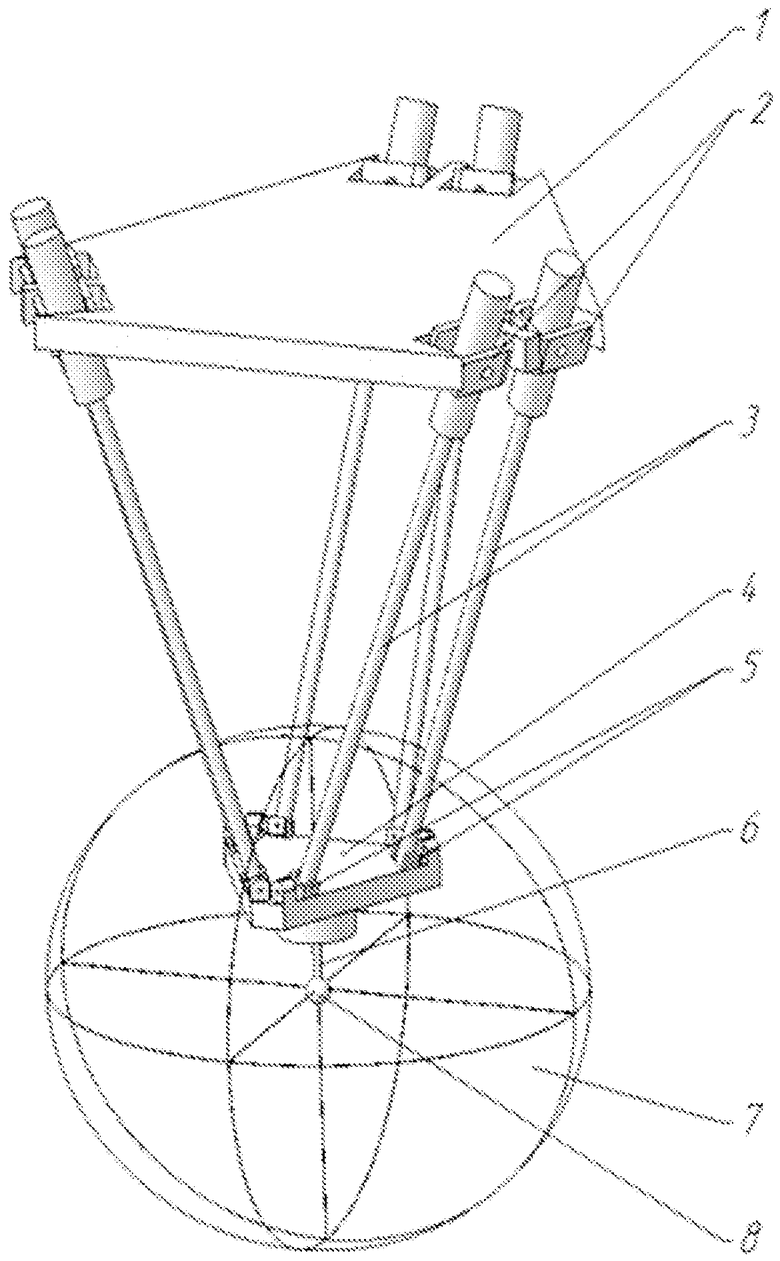
Устройство позиционирования исполнительного органа внутри его рабочей зоны для измерительной или обрабатывающей машины, содержащее базовую раму, снабженную шестью шарнирами, платформу для размещения исполнительного органа с рабочей точкой, снабженную шестью шарнирами, шесть стержней переменной длины, каждый из которых одним концом прикреплен к шарниру рамы, а другим - к шарниру платформы, отличающееся тем, что шарниры на базовой раме и на платформе размещены попарно в трех вершинах равносторонних треугольников, при этом стержни переменной длины соединяют шарниры платформы из одной вершины с шарнирами базовой рамы из разных вершин, а центр рабочей зоны размещен в местоположении рабочей точки исполнительного органа, при котором сумма скалярных произведений единичных векторов, совпадающих с линиями, проходящими вдоль стержней переменной длины от центров шарниров на базовой раме к центрам соответствующих шарниров на платформе, минимальна.
| Устройство для перемещения исполнительного органа | 1983 |
|
SU1142271A1 |
| Устройство для перемещения исполнительного органа | 1984 |
|
SU1224137A1 |
| US 6425177 B1, 30.07.2002 | |||
| US 6581437 B2, 24.06.2003 | |||
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 2007 |
|
RU2441743C2 |

