Настоящее изобретение касается способа синхронизации двигателей самолета, в частности двухвальных авиационных турбореактивных двигателей.
Малая разность в скоростях вращения двигателей самолета может вызвать акустический шум и нежелательные вибрации. Известна синхронизация каскадов низкого давления (ВР) или высокого давления (НР) двухвальных двигателей самолета для уменьшения вибраций, ощущаемых в салоне, и шума, а также повышения комфорта пассажиров.
Однако эта функция синхронизации отвечает только требованиям комфорта и не должна вызывать риски для двигателей или самолета. Синхронизация двигателей, таким образом, деактивируется, если условия безопасности не выполнены, даже если команда на активацию синхронизации подается пилотом и все условия активации синхронизации выполнены. Эти условия безопасности представляют собой, например, предельные значения, которые не должны быть достигнуты для того, чтобы синхронизация была активирована и удерживалась. Этими величинами являются, например, минимальная и максимальная скорости ротора каскада НР каждого двигателя (N2min, N2max), максимальное статическое давление в камере сгорания каждого двигателя (Ps3max) и предельные значения - нижнее (риск потери тяги) и верхнее (риск помпажа) - отношения Q расчета размеров каждого двигателя (Q=расход топлива/Ps3max).
Однако условия безопасности могут проверяться каждый раз только по команде активации синхронизации, подаваемой пилотом, так как это отрицательно сказывается на производительности двигателя, поэтому активация синхронизации не осуществляется только по простой команде пилота, а требует проверки дополнительных условий.
В документе FR-А1-2 639 444 описан способ синхронизации двигателя, приводимого следящей системой, и основного двигателя самолета, эти двигатели являются двухвальными турбореактивными, каждый из которых содержит ротор вентилятора и ротор газогенератора. Скорость вращения вентилятора или ротора каскада низкого давления двигателя, приводимого следящей системой двигателя (называемая N1), и скорость газогенератора или ротора каскада высокого давления двигателя, приводимого следящей системой (называемая N2), может управляться путем регулирования расхода питания топливом двигателя при изменении углового положения лопаток статора двигателя и т.д.
В этом документе активация синхронизации осуществляется, когда разность между упомянутыми скоростями вентиляторов (Δ1N1) двух двигателей станет меньше 100 об/мин, и она деактивируется, когда эта разность превосходит эту величину, или когда один из двигателей останавливается или глохнет, или когда один из сигналов N1 не определяется, или когда отношение PLA/N2 приводимого следящей системой двигателя превышает определенный предел (аббревиатура PLA - Power Level Angle - соответствует положению рычага газа в кабине экипажа самолета). Пилот самолета проинформирован о деактивации синхронизации. Синхронизация повторно активируется автоматически, когда разность ΔN1 опустится ниже 100 об/мин. Этот способ является полностью автоматическим и не требует специальных действий со стороны пилота самолета.
Недостатком такого типа синхронизации является то, что он является полностью автоматическим. Действительно, синхронизация двигателей повторно активируется, когда все условия вновь выполнены без специальной команды пилота самолета. Во всяком случае, может случиться, что эти условия представляют риск для двигателей или для самолета (случай помпажа или разносная скорость двигателей, например) и что будет опасным автоматическая повторная активация синхронизации двигателей. Впрочем, когда условия не представляют никакого риска для двигателей или самолета (например, случай переходного режима двигателей), было бы нежелательным требовать подтверждения пилотом повторной активации синхронизации, так как следствием этого может явиться отвлечение и уменьшение концентрации внимания пилота возможными многочисленными изменениями результатов этих условий (колебание действительно/ложно).
Кроме того, когда синхронизация активируется автоматически, заданная величина скорости N1 (или N2) подчиненного двигателя выравнивается с величиной скорости главного двигателя и отходит, таким образом, от своей изначальной заданной величины, которая рассчитана для обеспечения требуемой тяги оптимальным образом. Вследствие синхронизации режимов тяга этого двигателя больше не является оптимальной: она или увеличивается, уменьшая срок службы двигателя, или уменьшается, заставляя пилота нажимать на рычаг газа, что, таким образом, приводит к тому же самому. Это основной недостаток полностью автоматических логик активации: производительность двигателя ухудшается из-за синхронизации, даже когда она не является необходимой, например, когда вибрации остаются на приемлемом уровне, и только непосредственно пилот может это оценить. Таким образом, полезно ввести команду пилота в активацию синхронизации, хотя это может создавать проблемы в определенных случаях, как указано выше.
Целью изобретения является простое, эффективное и экономичное решение этих проблем известного уровня техники.
Объектом изобретения является способ синхронизации, в котором одна или несколько логик активации синхронизации обеспечивают автоматическую повторную активацию синхронизации, когда это не представляет никакого риска для двигателей или самолета, и требуют подтверждения пилотом в том случае, когда мог бы существовать риск для двигателей или самолета.
Для этого в изобретении предлагается способ синхронизации двигателей самолета с помощью, по меньшей мере, одной логики активации, предназначенной для контроля условий безопасности для активации синхронизации и условий активации синхронизации, отличающийся тем, что логика активации определяет, по меньшей мере, деактивированное состояние, состояние готовности и активированное состояние синхронизации, а также тем, что она включает:
- переход синхронизации из деактивированного состояния в состояние готовности, когда команда на активацию подана пилотом самолета;
- переход синхронизации из состояния готовности в активированное состояние, когда выполнены определенные условия безопасности и/или активации; и
- переход синхронизации из активированного состояния или состояния готовности в деактивированное состояние, когда пилот дал команду на деактивацию или когда не выполнены условия безопасности.
Логика активации в способе по изобретению включает, таким образом, по меньшей мере, состояние активации синхронизации, дополнительное относительно предусмотренного в известном уровне техники, где синхронизация или деактивирована (режим OFF), или активирована (режим ON), при этом синхронизация по изобретению может принимать, по меньшей мере, состояние готовности в режиме OFF кроме деактивированного состояния.
Условия повторной активации синхронизации также различаются в зависимости от состояния синхронизации в режиме OFF.
В случае, когда синхронизация находится в деактивированном состоянии, команда на активацию должна подаваться пилотом для перехода синхронизации в состояние готовности. В случае, когда по меньшей мере, определенные условия безопасности и/или активации выполнены, синхронизация переходит, таким образом, из состояния готовности в активированное состояние.
Условия безопасности отличаются от условий активации и должны быть выполнены для защиты двигателей и самолета. Этими условиями безопасности являются, например, следующие: отсутствие помпажа двигателей, разносной скорости двигателей, пониженной или повышенной тяги двигателей, крупной неисправности двигателей и т.д. Эти условия позволяют, например, исключить, чтобы работоспособный двигатель следовал поведению поврежденного двигателя.
Условия активации синхронизации должны быть выполнены для оптимизации работы двигателей, так как синхронизация не приспособлена ко всем режимам работы и может быть различна в зависимости от типа режима (НР или ВР) синхронизации двигателей. Условиями активации являются, например, разность заданных значений скорости каскадов ВР и/или НР двигателей, меньшая примерно 10%, предпочтительно меньшая 5% и, в особенности, меньшая 2%; разность скоростей каскадов ВР и/или НР, меньшая примерно 10%, предпочтительно меньшая 5% и, в особенности, меньшая 2%, разность между заданным значением и измеренной скоростью каскадов ВР и/или НР, меньшая примерно 10%, предпочтительно меньшая 5% и, в особенности, меньшая 2%, режим крейсерского полета, переходный, малого газа или отличающийся от взлета и посадки.
В случае, когда синхронизация находится в состоянии готовности или активированном, команда на деактивацию может быть подана пилотом. Переход из активированного состояния или состояния готовности в деактивированное состояние осуществляется, во всяком случае, автоматически, когда, по меньшей мере, часть условий безопасности не выполнены.
Способ синхронизации по изобретению включает, таким образом, два типа активации или, повторной активации, а именно автоматическую повторную активацию и повторную активацию по команде пилота самолета. Автоматическая повторная активация осуществляется, когда изменяются только условия активации (условия безопасности полностью выполнены), а повторная активация, подтверждаемая пилотом, осуществляется при изменении условий безопасности (независимо от результата проверки условий активации).
На практике, в кабине пилота самолета устанавливают, по меньшей мере, одну кнопку активации синхронизации и, в частности, две кнопки в случае, когда двигатели являются двухвальными (НР и ВР). Первая кнопка предназначена для управления активацией синхронизации каскадов ВР двигателей (N1Sync), а вторая предназначена для управления активацией синхронизации каскадов НР двигателей (N2Sync). Каждая кнопка может принимать два положения, одно положение ON (например, утоплена и загорелась) и положение OFF (выпущена и потухла). Пилот не может одновременно давать команду синхронизировать два каскада. В случае, когда он нажимает на первую кнопку, чтобы ее включить, когда вторая кнопка уже находится во включенном положении, эта вторая кнопка автоматически выключается, чтобы вернуться в выпущенное положение.
Пилот самолета должен, таким образом, нажать на одну из кнопок, чтобы потребовать активацию синхронизации, которая переходит из деактивированного состояния в состояние готовности. Как ранее показано, синхронизация переходит из состояния готовности в активированное положение, когда, по меньшей мере, определенные условия безопасности и/или активации выполнены. В случае, когда пилот вновь нажимает на кнопку, чтобы аннулировать команду, синхронизация переходит в деактивированное состояние. Синхронизация переходит в деактивированное состояние также когда, по меньшей мере, часть условий безопасности не выполнена. В последнем случае синхронизация находится в деактивированном состоянии, тогда как кнопка в кабине экипажа может быть утоплена и гореть. Пилот должен, таким образом, дважды нажать на кнопку для того, чтобы перевести ее в выпущенное положение, затем вновь в утопленное положение для перехода синхронизации в состояние готовности. Команда пилота в этом случае является необходимой для повторного приведения синхронизации в готовность.
Изобретение позволяет оптимизировать готовность функции синхронизации и КПД двигателя путем отделения случаев, когда повторная активация синхронизации может быть осуществлена автоматически без риска, и случаев, когда команда пилота является необходимой для этой повторной активации.
Средства воплощения способа по изобретению могут, например, содержать электронную микросхему, в которой закодирована, по меньшей мере, одна логика активации, логические порты (И, ИЛИ, НЕТ и т.д.) и средства суммирования, сравнения, определения фронта, условий и т.д.
Условия применения и удержания синхронизации могут контролироваться через равномерные интервалы, например каждые 30 мс.
Логика активации включает в себя, предпочтительно, переход из активированного состояния в состояние готовности, когда, по меньшей мере, некоторые из условий активации не выполнены. Это, например, случай, когда синхронизация больше не осуществляется, так как самолет находится в фазе взлета или посадки и не находится, таким образом, в фазе крейсерского полета.
В соответствии с другой характеристикой способа по изобретению логика активации определяет два раздельных активированных состояния, включающих гарантированное активированное состояние и негарантированное или испытательное активированное состояние (или «синхронной попытки»). Логика активации содержит, таким образом, четыре состояния активации, два в режиме ON (гарантированное активированное состояние и негарантированное активированное состояние) и два в режиме OFF (деактивированное состояние и состояние готовности).
Логика активации может содержать переход из состояния готовности в негарантированное активированное состояние, если выполнена только заданная часть условий активации, и в гарантированное активированное состояние, если все условия активации выполнены. Синхронизация может переходить из негарантированного активированного состояния в гарантированное активированное состояние, или наоборот, в зависимости от изменений, произошедших в результатах проверок условий активации.
Когда синхронизация находится в негарантированном активированном состоянии, она не деактивирована. Разница по сравнению с гарантированным активированным состоянием может быть на уровне индикации в кабине пилота, чтобы просигнализировать пилоту, что в этом состоянии, которое соответствует, например, переходному режиму или малому газу, функционирование синхронизации не гарантировано. Однако, как будет описано ниже, двигатели могут находиться в очень близких режимах, как если бы они были действительно синхронизированы. В этом случае не стоит деактивировать синхронизацию. Если все условия активации выполнены, синхронизация перейдет в активированное состояние.
Когда двигатели являются двухвальными и содержат каскад низкого давления (ВР) и каскад высокого давления (НР), активация синхронизации каскада ВР двигателей предпочтительно осуществляется в соответствии с первой логикой активации, а активация синхронизации каскадов НР двигателей осуществляется в соответствии со второй логикой активации. Условия активации синхронизации каскадов ВР отличаются от условий синхронизации каскадов НР, при этом логика активации синхронизации каскадов НР может отличаться от синхронизации каскадов ВР, в частности, тем, что синхронизация каскадов НР может удерживаться в переходном режиме (пока разность скоростей ΔN2 остается малой).
Условия для применения синхронизации каскадов ВР и/или НР содержат, например, одно или несколько следующих условий:
- А1: разность заданных значений скоростей роторов ВР или НР двигателей меньше 10%;
- А2: не обнаружено никакой неисправности, которая может повлиять на работоспособность двигателей или вызвать риски для самолета;
- А3: разность измеренных скоростей роторов ВР или НР двигателей меньше 10%;
- А': разность между заданным значением скорости и измеренной скоростью ВР или НР каждого ротора меньше 10%;
- В: по меньшей мере, один из двигателей находится в режиме малого газа; и
- С: самолет находится в полете и не находится ни в фазе взлета, ни в фазе набора высоты.
Синхронизация может переходить из активированного состояния в деактивированное состояние, когда условия А1, А2 и, при необходимости, А3 (для синхронизации НР) не выполнены. Синхронизация может переходить из активированного состояния в состояние готовности, когда условия С не выполнены.
Настоящее изобретение касается также логики восходящего фронта по команде пилота, которая позволяет не приводить синхронизацию в состояние готовности, если она деактивирована и если упомянутая кнопка в кабине пилота остается утопленной.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
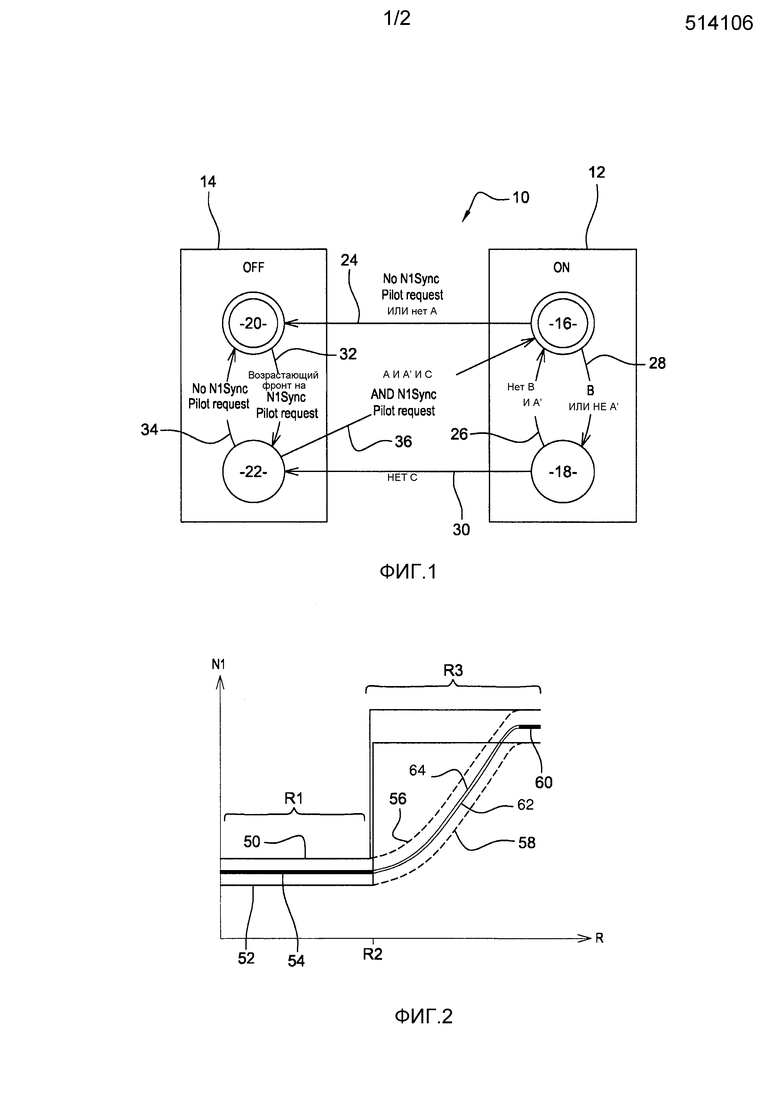
- фиг. 1 представляет схему, иллюстрирующую логику активации по изобретению для синхронизации роторов каскадов низкого давления двигателей самолета;
- фиг. 2 изображает весьма схематичный график, представляющий изменение заданных значений синхронизации роторов ВР двигателей самолета в зависимости от режима этих двигателей;
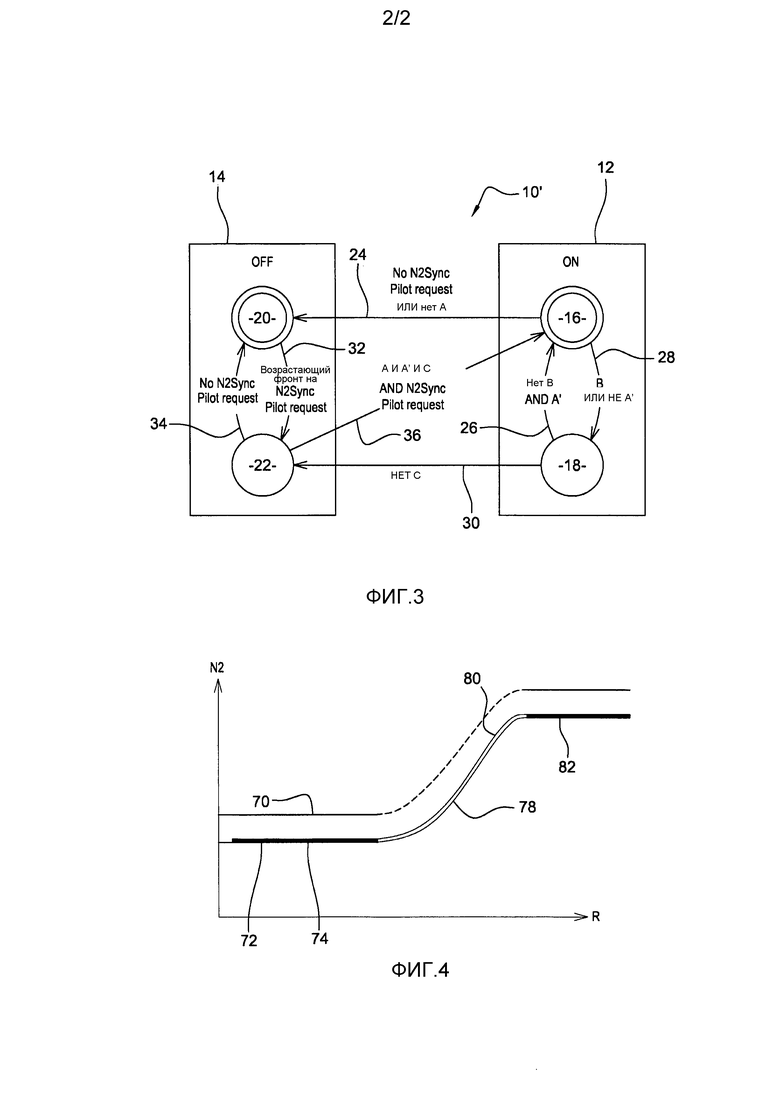
- фиг. 3 представляет схему, иллюстрирующую логику активации по изобретению для синхронизации роторов каскадов высокого давления двигателей самолета; и
- фиг. 4 изображает весьма схематичный график, представляющий изменение заданных значений синхронизации роторов НР двигателей самолета в зависимости от режима этих двигателей.
Схемы на фиг. 1 и 3 представляют логики 10, 10' активации синхронизации двигателей самолета в соответствии с настоящим изобретением и, в частности, двухвальных двигателей, таких как турбореактивные или турбовинтовые двигатели. Схема на фиг. 1 представляет логику 10 активации синхронизации роторов каскадов низкого давления (ВР) двигателей, а схема на фиг. 3 представляет логику 10' активации синхронизации роторов каскадов высокого давления (НР) этих двигателей.
В каждой логике активации 10, 10' синхронизация может быть в режиме ON или включено (представленном прямоугольником 12) или в режиме OFF или отключено (представленном прямоугольником 14). В данном примере логика активации 10, 10' представляет четыре состояния активации синхронизации: два состояния в режиме ON (гарантированное активированное состояние 16 и негарантированное активированное состояние 18) и два состояния в режиме OFF (деактивированное состояние 20 и состояние готовности 22).
Стрелки 24-36 представляют возможные переходы из одного состояния синхронизации к другому состоянию синхронизации, при этом определенные из этих переходов являются автоматическими при изменении условий применения синхронизации, а другие переходы требуют подачи команды активации или деактивации пилотом самолета.
Условия применения синхронизации являются двух типов: условия безопасности, предназначенные для защиты двигателей и самолета, и условия активации, предназначенные для оптимизации работы двигателей.
В примере воплощения, представленном на чертежах, логика активации 10, 10' включает в себя четыре условия, названные соответственно А, А', В и С. Условия А, А', В и С логики активации 10 синхронизации каскадов ВР не являются все идентичными условиям логики активации 10' синхронизации каскадов НР.
В том, что касается синхронизации каскадов ВР (фиг. 1), условия А содержат условие активации А1 и условие безопасности А2. Условием активации А1 является:
|ΔN1dmd_PWM| <5%,
в соответствии с которым разность заданных значений скоростей N1 роторов ВР двигателей (в абсолютной величине) должна быть ниже 5%. ΔN1 представляет разность между скоростями роторов ВР, «dmd» означает, что именно заданное значение каждого двигателя принимается в расчет, а «PWM» означает, что это заданное значение присуще каждому двигателю и вычислено функцией управления мощностью в вычислителе каждого двигателя (эта функция вычисляет заданные значения N1 в зависимости от положения рычага газа и других параметров). Если двигатели имеют весьма различные режимы ВР (А1>5%, например, вследствие того, что рычаги управления двигателей в кабине пилота находятся в различных положениях, или потому, что заданные значения являются весьма различными вследствие того, что расхождение между скоростями N1 двигателей является весьма большим, чтобы двигатели производили одинаковую тягу), условие А1 не выполняется. Таким образом, контролируется именно расхождение между двумя заданными значениями. Синхронизация может быть деактивирована, если рычаги управления двигателями находятся в различных положениях (то есть отведены один от другого).
Условием активации А2 является отсутствие обнаружения неисправности, которая может повредить двигатели или вызвать риски для двигателей или самолета и пассажиров. Действительно, когда синхронизация является функцией комфорта, не представляет никакого риса и она деактивируется в случае неожиданного события с двигателем (помпаж, разносная скорость, недостаток или избыток тяги, и т.д.) или отказа для исключения того, чтобы исправный двигатель повторял, в частности, поведение неисправного двигателя.
Условия А1 и А2 являются совокупными и должны быть оба выполнены для того, чтобы условия А рассматривались как выполненные.
Как обозначено стрелкой 24, эти условия А должны быть обязательно выполнены для активации синхронизации, то есть для того, чтобы синхронизация находилась в режиме ON. В случае, когда эти условия не выполнены (или когда условия «нет А» выполнены), синхронизация автоматически деактивируется и переходит из режима ON (гарантированного активированного состояния 16 или негарантированного активированного состояния 18) в режим OFF (деактивированное состояние 20). Эти условия А, которые включают одновременно условие активации А1 и условие безопасности А2, являются, таким образом, необходимыми для активации синхронизации и это независимо от команд, подаваемых пилотом. Безопасность, таким образом, является предпочтительной по сравнению с комфортом, обеспечиваемым синхронизацией двигателей самолета.
Как указано выше, условия А содержат два совокупных условия А1 и А2. В случае, когда одно из них не выполнено, синхронизация деактивируется независимо от гарантированного или негарантированного активированного состояния. Действительно, при происшествии или отказе двигателя пилот должен реагировать и решить, хочет ли он повторно активировать синхронизацию, как только отказ устранен. В случае расхождения заданных значений именно пилот должен принять решение повторно активировать синхронизацию.
Как обозначено стрелкой 24, переход из активированного состояния (негарантированного 18 или гарантированного 16) в деактивированное состояние 20 может также явиться результатом команды, поданной пилотом самолета, который желает деактивировать синхронизацию («No N1Sync - запрос пилота). Условия «нет А» и «No N1Sync» не являются совокупными вследствие термина OR (или). Таким образом, достаточно, чтобы одно или другое из этих условий было выполнено для того, чтобы синхронизация была деактивирована.
Условия активации А' включают в себя два условия активации - А'1 и A'2, которые соответственно представляют собой:
|N1dmd_ctrl1-N1sel1|<5% и
|N1dmd_ctrl2-N1sel2|<5%,
в соответствии с которыми разность между заданным значением («dmd», «demand» на англ. яз.) и измеренной величиной («sel», «selected» на англ. яз.) скорости N1 каждого ротора ВР (в абсолютной величине) должна быть меньше 5%. «ctrl» означает, что в расчет принимается заданное значение текущего регулирования («control» на англ. яз.), то есть общее среднее заданное значение при работе синхронизации. Эти условия выполняются, когда два двигателя находятся в стабилизированном режиме, а не в переходном режиме. Напротив, условия «нет А'» выполняются, когда по меньшей мере один из двигателей находится в переходном режиме.
Эти условия А' должны быть обязательно выполнены для активизации синхронизации. Однако, когда они не выполнены, синхронизация не обязательно деактивируется, как будет показано ниже.
Условия активации В выполняются, если, по меньшей мере, один из двигателей находится в режиме малого газа. Эти условия используются для перехода между гарантированным активированным состоянием и негарантированным активированным состоянием, и, напротив, когда самолет контролируется контуром малого газа и когда рычаг управления находится в положении малого газа.
Как показано стрелкой 26 синхронизация переходит из негарантированного активированного состояния 18 в гарантированное активированное состояние 16, если упомянутые условия А' выполнены, а условия В не выполнены (или что условия «нет В'» выполнены). Синхронизация переходит из гарантированного активированного состояния 16 в негарантированное активированное состояние 18, если выполнены одно или другое из условий Bsont или когда условия А' не выполнены (или, напротив, когда условия «нет А'» выполнены - стрелка 28).
Другими словами, синхронизация переходит из негарантированного активированного состояния 18 в гарантированное активированное состояние 16, если двигатели не находятся в режиме малого газа, и расхождение между заданным и измеренным значениями скорости N1 каждого двигателя меньше 5%.
Например, когда двигатели находятся в переходном режиме, условия А' не выполнены. Синхронизация переходит в негарантированное активированное состояние, так как было бы бесполезно деактивировать синхронизацию, потому что регулирование не осуществляется больше скоростями N1. Не важно, является ли заданное значение скорости N1 заданным значением, присущим двигателю или общим заданным значением синхронизации. Когда условия А' будут вновь выполнены по окончании переходного режима, синхронизация автоматически вернется в гарантированное активированное состояние.
На фиг. 2 представлено изменение скорости N1 роторов ВР двигателей самолета, когда начинается изменение режимов этих двигателей.
В рассматриваемом примере самолет оборудован только двумя двигателями и график фиг. 2 содержит две кривые 50, 52, представляющие заданные значения скоростей N1, присущих двигателям, то есть заданные значения, являющиеся результатом положений рычагов газа, перемещаемых пилотом самолета. Эти кривые 50, 52 имеют форму ступеньки лестницы, каждая из которых содержит первую горизонтальную часть, представляющую постоянное заданное значение N1, так как режим R1 двигателя стабилизирован, вертикальную часть, представляющую изменение заданного значения N1, так как режим R2 является переходным, и новую горизонтальную часть, представляющую постоянное заданное значение N1, так как режим R3 является вновь стабилизированным.
Переход из стабилизированного режима R1 в переходный режим R2 вызван перемещением рычагов газа пилотом самолета. Как видно на фиг. 2, заданные значения N1, присущие двигателям, несколько отличаются для получения одинаковой тяги, даже если рычаги газа двигателей находятся в одинаковом же положении. Действительно, можно констатировать, что два двигателя одного и того же самолета могут вращаться с несколько различными скоростями для получения одинаковой тяги.
Заданное значение N1 для синхронизации роторов ВР равно средней величине заданных значений, присущих двигателям N1. Скорости N1 двигателей принимают таким образом это заданное значение, которое схематично представлено непрерывной толстой линией 54 на фиг. 2, которая расположена между кривыми 50 и 52 в указанной первой горизонтальной части этих кривых.
Когда условия А' не выполнены, то есть двигатели находятся в переходном режиме, синхронизация роторов ВР переходит в негарантированное активированное состояние. В переходном режиме каждый двигатель регулируется заданным значением dN/dt, интегрированным исходя из текущей скорости ротора. Таким образом, части кривой 56 и 58 представляют изменение скорости N1 ротора ВР, которую мог бы иметь каждый двигатель без синхронизации: они исходят из их текущей скорости и следуют по двум кривым, полученным благодаря суммированию их переходных заданных значений dN/dt, которые являются близкими. Таким образом, оба двигателя синхронизированы непосредственно перед их переходом в переходное состояние. Когда они переходят в переходное состояние, они, практически, имеют одинаковую текущую скорость ротора ВР. Их скорости, таким образом, соответствуют двум, по существу, идентичным кривым 62 и 64, полученным из двух заданных значений dN/dt, также близких, хотя технически они не соответствуют одинаковому значению синхронизации. Когда условия А' вновь выполнены, синхронизация переходит в гарантированное активированное состояние, и скорости N1 могут принять общее заданное значение для синхронизации роторов ВР, которое равно средней величине заданных значений, присущих двигателям (толстая непрерывная линия 60 на фиг. 2).
Условия активации С выполняются, когда самолет находится в полете и не находится ни в фазе взлета, ни в фазе набора высоты. Рычаги управления двигателями, таким образом, не находятся за пределами положения «Max Climb».
Как показано стрелкой 30, эти условия С должны быть обязательно выполнены для активации синхронизации, то есть для того, чтобы синхронизация находилась в режиме ON. В случае, когда эти условия С не выполнены (или когда условия «нет С» выполнены), синхронизация автоматически переходит из режима ON (гарантированного активированного состояния 16 или негарантированного активированного состояния 18) в режим OFF (состояние готовности 22). Таким образом, синхронизация не переходит в деактивированное состояние, чтобы она могла автоматически повторно активироваться без повторной команды пилота.
Команда пилота (N1Sync Pilot Request)необходима для перехода синхронизации из деактивированного состояния 20 в состояние готовности 22 (стрелка 22) путем нажатия на соответствующую кнопку (N1Sync) в кабине пилота.
Кабина пилота самолета содержит две кнопки активации синхронизации: первую кнопку (N1Sync) для активации синхронизации каскадов ВР двигателей и вторую кнопку для активации синхронизации каскадов НР двигателей. Каждая из этих кнопок может принимать два положения, соответственно ON и OFF. В положении ON кнопка утоплена и горит, а в положении OFF она выпущена и погасла. Пилот не может одновременно дать команду на синхронизацию двух каскадов двигателей. В случае, когда он нажимает на первую кнопку, чтобы ее утопить, когда вторая кнопка уже находится в утопленном положении, эта вторая кнопка автоматически срабатывает, чтобы вернуться в выпущенное положение.
Команда пилота (N1Sync Pilot Request) требует, таким образом, нажатия на кнопку N1Sync, чтобы ее утопить и перевести в положение ON.
Другая команда пилота (No N1Sync Pilot Request) необходима для перехода синхронизации из состояния готовности 22 в деактивированное состояние 20 (стрелка 34) путем нового нажатия на кнопку N1Sync так, чтобы она была в выпущенном положении или OFF.
Как ранее показано, команда пилота (No N1Sync Pilot Request) может быть необходима для перехода синхронизации из активированного состояния в деактивированное состояние (стрелка 24). Эта команда пилота требует также нажатия на кнопку N1Sync для ее перевода в выпущенное положение или OFF.
В случае, когда переход синхронизации из активированного состояния (16 или 18) в деактивированное состояние (20) является следствием того, что условия А не выполнены (стрелка 24), синхронизация находится в деактивированном состоянии, хотя кнопка N1Sync находится в утопленном положении или ON. Для приведение синхронизации в состояние готовности (стрелка 32) пилот должен будет дважды нажать на кнопку для того, чтобы ее выключить, затем для того, чтобы ее снова включить. Действительно, логика в соответствии с изобретением должна обнаружить восходящий фронт по команде пилота для того, чтобы синхронизация перешла в активированное состояние.
Стрелка 36 показывает переход синхронизации из состояния готовности 22 в активированное состояние 16. Условия А, А' и С должны быть выполнены для активации синхронизации. Кроме того, необходимо, чтобы кнопка N1Sync находилась в положении ON или утопленной, что означает, что пилот уже дал команду на активацию синхронизации (N1Sync Pilot Request). Эти условия являются совокупными и должны быть все выполнены для активации синхронизации.
Никакой команды пилота не требуется для подтверждения и активации синхронизации, когда кнопка N1Sync находится в положении ON или утопленном, и что синхронизация перешла в состояние готовности 22 вследствие того, что условия С не были выполнены (стрелка 30). Однако, как это обозначено стрелкой 32, команда пилота является необходимой для повторного приведения в готовность синхронизации, которая перешла в деактивированное состояние вследствие того, что условия А не были выполнены (стрелка 24). Повторная активация синхронизации является автоматической только в определенных случаях, что позволяет улучшить КПД двигателей и обеспечить защиту двигателей и самолета.
Что касается синхронизации каскадов НР (логика активации 10' на фиг.3), то условия А включают в себя два условия активации А1 и А3 и условие безопасности А2. Условиями активации А1 и А3 являются:
|ΔN1dmd|<5% и
|ΔN2sel|<5%,
в соответствии с которыми разность заданных значений («dmd») скоростей роторов ВР двигателей (в абсолютном выражении) должна быть меньше 5% и разность измеренных величин («sel») скоростей роторов НР двигателей (в абсолютном выражении) должна быть меньше 5%. ΔN1 представляет собой разность между скоростями роторов ВР, а ΔN2 представляет собой разность между скоростями роторов НР. Для синхронизации каскадов НР один двигатель называют главным, а другой - подчиненным. Подчиненный двигатель принимает в качестве нового заданного значения скорости НР измерение скорости НР другого двигателя. Таким образом, нет необходимости дифференцировать заданное значение «N1dmd_PWM» от значения «N1dmd_ctrl», так как заданное значение скорости N1 не изменяется вследствие синхронизации.
Дополнительное условие А3 позволяет деактивировать синхронизацию, если расхождение между двумя измерениями скоростей N2 меньше 5%. Действительно, необходимо проверить это по причине природы этого типа синхронизации, когда заданное значение подчиненного двигателя является измерением другого двигателя. Это, с одной стороны, исключает весьма значительные скачки тяги при активации/деактивации синхронизации, и это особенно исключает риск при неисправном основном двигателе, который подвергся не выявленному отказу или повреждению двигателя и портил бы исправный подчиненный двигатель.
Условием активации А2 остается отсутствие обнаружения неисправности, которая может повредить двигатели или порождать риски для двигателей или самолета и пассажиров.
Условия А1, А2 и А3 являются совокупными и должны быть все выполнены для того, чтобы условия А рассматривались как выполненные.
Как для синхронизации каскадов ВР двигателей, синхронизация каскадов НР переходит из активированного состояния (гарантированного 16 или негарантированного 18) в деактивированное состояние в зависимости от результатов проверок условий А (стрелка 24).
Как показано на этой стрелке 24, переход из активированного состояния 16, 18 в деактивированное состояние 20 может являться результатом команды, передаваемой пилотом самолета, который желает деактивировать синхронизацию («No N2Senc Pilot request»), нажимая на кнопку N2Sync для ее перемещения в положение OFF или выпущенное.
Условия активации А' включают в себя два совокупных условия активации А'1 и A'2, которые соответственно составляют:
|N1dmd1-N1sel1|<5% и
|N1dmd2-N1sel2|<5%,
в соответствии с которыми разность между заданным значением и измеренным значением скорости N1 каждого ротора НР (в абсолютном выражении) должна быть меньше 5%.
Фиг. 4 представляет изменение скорости N2 роторов НР двигателей самолета, когда происходит изменение режимов этих двигателей.
Кривые 70, 72 представляют заданные значения скоростей N2, присущих двигателям, и содержат каждая первую горизонтальную часть, для которой заданные значения N2 являются постоянными при стабилизированном режиме R1, наклонную часть, для которой заданные значения N2 повышаются в переходном режиме R2, и новую горизонтальную часть, для которой заданные значения N2 являются постоянными в стабилизированном режиме R3.
Положения этих кривых 70, 72 одна относительно другой позволяют идентифицировать главный двигатель для синхронизации каскадов НР. Главный двигатель является двигателем, ротор НР которого вращается с меньшей скоростью N2 для обеспечения заданной тяги, то есть тяги, соответствующей кривой 72 на фиг. 4.
Заданное значение N2 для синхронизации роторов НР равно заданному значению, присущему главному двигателю, то есть заданному значению, соответствующему кривой 72. Это заданное значение N2 схематично представлено непрерывной толстой линией 74 на фиг. 4, которая расположена на кривой 72 в упомянутой первой горизонтальной части этой кривой.
В переходном режиме синхронизация роторов НР переходит в негарантированное активированное состояние. Как при синхронизации скоростей N1, скорости N2 каждого двигателя следуют, по существу, идентичным траекториям 78 и 80, так как исходят из близких заданных значений dN/dt, интегрирование которых происходит из одного и того же первоначального значения. Когда режим вновь стабилизируется (R3), синхронизация переходит в гарантированное активированное состояние и скорости N2 принимают заданное значение N2 для синхронизации роторов НР, которое равно заданному значению, присущему главному двигателю (толстая непрерывная линия 82 на фиг. 2).
Условия активирования В и С логики активации 10' каскадов НР двигателей идентичны условиям, описанным выше, касающимся логики активирования 10 каскадов ВР этих двигателей.
Изобретение применимо для синхронизации двух, трех, четырех двигателей, и даже больше, одного самолета. В случае синхронизации каскадов ВР двигателей двухвального типа заданные значения N1 синхронизации могут быть равны среднему значению заданных значений N1 различных двигателей. Касаясь синхронизации каскадов НР двигателей, можно сказать, что заданные значения N2 для синхронизации являются предпочтительно заданными значениями, присущими одному из двигателей, рассматриваемому в качестве главного, при этом другие двигатели рассматриваются как подчиненные двигатели, предназначенные для следования поведению главного двигателя.
Изобретение относится к управлению двигателями самолета. Способ синхронизации двигателей самолета с помощью логики активации, предназначенной для проверки условий безопасности и/или активации для применения синхронизации, где логика активации определяет деактивированное состояние, состояние готовности и активированное состояние. Способ дополнительно включает переход синхронизации из деактивированного состояния в состояние готовности, когда команда на активацию дана пилотом самолета; переход синхронизации из состояния готовности в активированное состояние, когда определенные условия безопасности и/или активации выполнены и переход синхронизации из активированного состояния или состояния готовности в деактивированное состояние, когда команда на деактивацию подана пилотом или когда условия безопасности не выполнены. Снижается риск для двигателей. 9 з.п. ф-лы, 4 ил.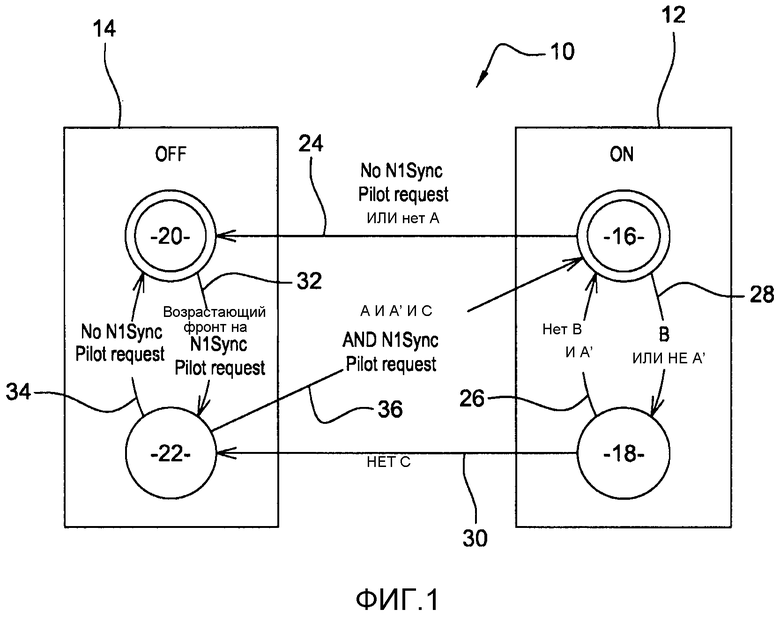
1. Способ синхронизации двигателей самолета с помощью, по меньшей мере, логики активации, предназначенной для проверки условий безопасности и/или активации для применения синхронизации, отличающийся тем, что логика активации (10, 10') определяет, по меньшей мере, деактивированное состояние (20), состояние готовности (22) и активированное состояние (16, 18), а также тем, что он включает:
- переход (32) синхронизации из деактивированного состояния в состояние готовности, когда команда на активацию дана пилотом самолета,
- переход (36) синхронизации из состояния готовности в активированное состояние, когда определенные условия безопасности и/или активации выполнены; и
- переход (24, 34) синхронизации из активированного состояния или состояния готовности в деактивированное состояние, когда команда на деактивацию подана пилотом или когда условия безопасности не выполнены.
2. Способ по п. 1, отличающийся тем, что логика активации (10, 10') включает переход (30) синхронизации из активированного состояния в состояние готовности, когда определенные условия активации не выполнены.
3. Способ по п. 1, отличающийся тем, что логика активации (10, 10') определяет два раздельных активированных состояния, включающих гарантированное активированное состояние (16) и негарантированное активированное состояние (18).
4. Способ по п. 3, отличающийся тем, что логика активации (10, 10') включает в себя переход синхронизации из состояния готовности в негарантированное активированное состояние, если выполнена только заранее заданная часть условий активации, и гарантированное активированное состояние, если все условия активации выполнены.
5. Способ по п. 3, отличающийся тем, что синхронизация переходит из негарантированного активированного состояния (19) в гарантированное активированное состояние (16), или наоборот, в зависимости от изменений, произошедших в результатах проверок условий активации.
6. Способ по одному из предыдущих пунктов, отличающийся тем, что двигатели выполнены двухвальными и содержат каскад низкого давления (ВР) и каскад высокого давления НР, при этом активацию синхронизации каскадов ВР двигателей осуществляют в соответствии с первой логикой активации (10), а активизацию синхронизации каскадов НР осуществляют в соответствии со второй логикой активации (10').
7. Способ по п. 6, отличающийся тем, что условия синхронизации каскадов ВР отличны от условий синхронизации каскадов НР.
8. Способ по п. 6, отличающийся тем, что условия для синхронизации каскадов ВР и/или НР включают одно или несколько следующих условий:
- А1: разность заданных значений скорости (N1, N2) роторов ВР или НР двигателей меньше 5%;
- А2: не обнаружено никакой неисправности, которая может повлиять на работоспособность двигателей или вызвать риски для самолета;
- А3: разность измеренных скоростей роторов ВР или НР двигателей меньше 5%;
- А': разность между заданным значением скорости и измеренной скоростью каждого ротора ВР и НР меньше 5%;
- В: по меньшей мере, один из двигателей находится в режиме малого газа; и
- С: самолет находится в полете и не находится ни в фазе взлета, ни в фазе набора высоты.
9. Способ по п. 8, отличающийся тем, что синхронизация переходит из активированного состояния (16, 18) в деактивированное состояние (20), когда условия А1, А2 и, при необходимости, А3 не выполнены.
10. Способ по п. 8, отличающийся тем, что синхронизация переходит из активированного состояния (16, 18) в состояние готовности (22), когда условия С не выполнены.
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИАМИДОИМИДОВ | 0 |
|
SU322342A1 |
| Узел уплотнения газовой турбины | 2017 |
|
RU2639444C1 |
| US 5224340 A, 06.07.1993 | |||
| СОСТАВ ДЛЯ ПРОИЗВОДСТВА ЛЕДЕНЦОВОЙ КАРАМЕЛИ | 2000 |
|
RU2225134C2 |
| JP S5632044 A, 01.04.1981. | |||

