Изобретение относится к устройству для автоматического управления системой обеспечения большой подъемной силы самолета согласно ограничительной части пункта 1 формулы изобретения.
Документ US 2006/049308 А1 описывает систему самолетного крыла с устройствами обеспечения подъемной силы и приводной системой с приводным звеном, выполненным с возможностью сочленения с устройствами обеспечения подъемной силы, и системой управления, сочлененной с приводной системой. Система управления имеет первую конфигурацию, в которой приводное звено эффективно сопряжено с первым и вторым выпускаемым устройством обеспечения подъемной силы, при этом активация по меньшей мере части приводного звена перемещает первое и второе выпускаемое устройство обеспечения подъемной силы. Система управления имеет также вторую конфигурацию, в которой приводное звено эффективно сопряжено с первым выпускаемым устройством обеспечения подъемной силы и эффективно разъединено со вторым выпускаемым устройством обеспечения подъемной силы, при этом при активации по меньшей мере части приводного звена первое выпускаемое устройство обеспечения подъемной силы перемещается относительно второго выпускаемого устройства обеспечения подъемной силы.
Известно множество систем обеспечения большой подъемной силы, которые применяются для увеличения максимальной подъемной силы на крыле самолета во время взлета, посадки и медленного полета. Они используются в самолетах гражданской авиации и другой транспортной авиации, а также в самолетах бизнес-класса и моторных спортивных самолетах. В случае гражданской авиации и другой транспортной авиации, в качестве аэродинамически эффективных элементов обеспечения большой подъемной силы широкое распространение получили системы обеспечения большой подъемной силы с предкрылками и закрылками на крыльях. Предкрылки выполняются с зазором между предкрылком и основным крылом или без такого зазора, а закрылки обычно выполняются в виде закрылков с одним зазором или в виде закрылков с несколькими зазорами.
Как правило, управление такими пред-/закрылками или элементами обеспечения большой подъемной силы в настоящее время происходит вручную с помощью рычага управления в кабине пилота, при этом в устройстве управления пред-/закрылками формируются электрические сигналы, которые соответствуют положению рычага, эти сигналы управляют положением пред-/закрылков посредством электрических или гидравлических исполнительных механизмов. Обычно, пред-/закрылки или элементы обеспечения большой подъемной силы выпускаются для взлета, полета в зоне ожидания и посадки, и убираются для крейсерского полета для того, чтобы уменьшить аэродинамическое сопротивление или лобовое сопротивление. Поскольку относительно характеристик полета и создания шума оптимальными для взлета, посадки и, если это применимо, полета в зоне ожидания являются различные углы отклонения, могут быть выбраны различные положения.
Кроме того, существуют концепции автоматического выпуска предкрылков как устройств обеспечения большой подъемной силы в качестве защитной меры, когда превышается критический угол атаки, или когда скорость полета падает ниже заданного предела для того, чтобы предотвратить сваливание и связанную с этим потерю подъемной силы. Более того, существуют системы, которые посредством убирания предназначены для предотвращения конструктивной перегрузки предкрылков или закрылков, когда превышается заданный верхний предел скорости полета.
Кроме того, известны концепции, которые нацелены на автоматизацию управления системами обеспечения большой подъемной силы. В этих концепциях можно провести различие между такими, которые предназначены для оптимизации летно-технических характеристик, что важно, прежде всего, для взлета, и такими, которые главным образом предназначены для защиты самолета от какого-либо повреждения или возникновения неконтролируемых состояний полета.
Из US 2350751 известна система, в которой и управление, и выпуск, и убирание закрылков осуществляются электрически с помощью электродвигателя. Управление закрылками должно осуществляться таким образом, чтобы максимальная подъемная сила крыла самолета увеличивалась. Рычаг управления закрылками обеспечивает возможность выбора вручную между тремя различными углами отклонения, а именно одним, в котором угол отклонения равен нулю (далее также называемым «убранным состоянием» или «полетным положением»), одним для взлета и одним для посадки. Известная система предназначена для автоматического убирания закрылков после взлета, когда превышен определенный динамический напор. В соответствии с положением рычага управления закрылками, которое выбирается в полете, закрылки автоматически выпускаются в соответствующее взлетное или посадочное положение, если динамический напор падает ниже порогового значения, которое является независимым от выбранной конфигурации.
Система позволяет, в случае, если динамический напор ниже порогового значения динамического напора, выбирать любое из трех положений закрылков с помощью рычага управления закрылками, при этом выбранные конфигурации принимаются немедленно. Выше порогового значения, независимо от положения рычага управления закрылками, всегда инициируется переход в убранное положение.
Недостатком является то, что известная система предусматривает только один переключающий динамический напор. В связи с аэродинамическими, конструкционными/механическими и связанными с характеристиками полета граничными условиями систем обеспечения большой подъемной силы больших современных самолетов, подходящие скорости для перевода закрылков из взлетного положения в полетное положение сильно колеблются относительно скорости выпуска закрылков из полетного положения в положение захода на посадку. Обычные управляемые вручную системы закрылков этих самолетов учитывают смежные дискретные углы отклонения закрылков, то есть положения закрылков, с помощью каскада накладывающихся диапазонов скорости. Изменение конфигурации закрылков от полетного положения в посадочное положение происходит промежуточными шагами. Чтобы получить соответствующее наложение скоростей в большом пассажирском самолете, требуется больше чем просто два или три различных положения для закрылков для обеспечения большой подъемной силы, если в то же время максимальные рабочие скорости в отдельных конфигурациях ограничены. Например, в аэробусе Airbus A320 предусмотрено шесть различных положений (0, 1, 1+F, 2, 3, Full). Ограничение максимальной рабочей скорости используется для предотвращения возникновения полетных состояний, в которых на закрылки для обеспечения большой подъемной силы могут действовать недопустимо высокие конструктивные нагрузки. За счет ограничения рабочих скоростей ожидаемые нагрузки снижаются и, следовательно, при соответствующем определении размеров, конструктивный вес может быть ограничен до уровня, который является оптимальным в контексте общей концепции.
В DE 2531799 С3 описано зависимое от скорости устройство для автоматического переключения закрылков, которое обеспечивает в значительной степени автоматическое управление закрылками. Целью является предотвращение катастроф в результате того, что экипаж самолета не установил закрылки в нужное положение. В отличие от упомянутого выше известного устройства, в этой конструкции предусмотрены только два положения закрылков вместо трех. В отличие от этого, по-прежнему должен быть предусмотрен гистерезис скорости, что в полете приводит к тому, что закрылки при более высокой скорости полета втягиваются и при сравнительно более низкой скорости полета снова выпускаются, только если не изменяется конфигурация переключателя динамического напора, предусмотренного в этом известном устройстве для автоматического переключения закрылков. Если динамический напор находится в диапазоне, который значительно больше нуля, но меньше, чем требуется для отрыва от земли, контакт переключателя динамического напора замыкается, что приводит к подаче тока на электрический привод закрылков в направлении убирания. Если динамический напор увеличивается, цепь тока прерывается. В диапазоне более высокого напора, который следует за диапазоном прерывания, который начинается ниже динамического напора необходимого для отрыва от земли и заканчивается на значениях, которые типичны для первоначального резкого набора высоты, замыкается другой контакт, и в результате этого приводной двигатель закрылков снабжается током в направлении выпуска закрылков. В другом варианте осуществления этого известного автоматического переключающего устройства цепь тока для выпуска закрылков замыкается уже во время выруливания посредством переключателя, который связан со скоростью вращения колес шасси. Во время дальнейшего увеличения динамического напора, которое типично для крейсерского полета, замыкание третьего контакта снова приводит к убиранию закрылков. Между отдельными диапазонами динамического напора имеются зоны, в которых не замкнута ни одна из цепей тока. При повторном последовательном уменьшении динамического напора, описанная выше последовательность происходит в обратном направлении. Таким образом, в случае очень низких и очень высоких скоростей полета, соответствующих имеющимся динамическим напорам, закрылок переводится в убранное состояние, в то время как в случае средних динамических напоров, которые типичны для отрыва самолета от земли, первоначального резкого набора высоты, а также для захода на посадку и для посадки, закрылок выпускается или остается в выпущенном состоянии. Согласно известному решению, как вариант, закрылки перед взлетом также возможно выпускать вручную. Затем разомкнутый прерыватель предотвращает убирание закрылков во время выруливания на взлет. Известное устройство для автоматического переключения закрылков связано с тем недостатком, что возможен только выбор одного из двух положений закрылков (а именно убранного или выпущенного положения). Еще один недостаток состоит в том, что, хотя динамические напоры переключения могут быть изменены посредством смещения скользящих контактов переключателя динамического напора, это требует вмешательства пилота. В зависимости от массы самолета в данный момент времени, в каждом случае скорости переключения должны быть установлены перед взлетом и перед посадкой, чтобы обеспечить убирание или выпуск закрылков при подходящих скоростях.
В US 4042197 описана еще одна система обеспечения большой подъемной силы для взлета и посадки самолета, с тем отличием, что управление системой значительно отличается в каждой фазе полета. Цель состоит в том, чтобы уменьшить шум, создаваемый самолетом на земле во время взлета и посадки. В результате применения автоматического устройства во время взлета должно происходить более раннее убирание закрылков после отрыва от земли по сравнению с обычным ручным управлением, и, следовательно, должно быть уменьшено аэродинамическое сопротивление, в то время как степень набора высоты должна быть увеличена ранее. Во время захода на посадку, автоматическое устройство должно обеспечить возможность приведения самолета в посадочную конфигурацию позднее, чем это обычно происходит при ручном выборе положения закрылков пилотом.
В известном автоматическом устройстве закрылки выпускаются вручную, перед взлетом, с помощью рычага управления закрылками. Затем рычаг управления закрылками перемещается в положение, до которого автоматическое устройство должно убрать закрылки автоматически после взлета. Никаких дополнительных объяснений относительно необходимой коммутационной логики не дается. Автоматическое убирание закрылков после взлета происходит в зависимости от скорости полета после уборки шасси. Скорость, при которой начинается убирание закрылков, предварительно выбирается экипажем перед взлетом. Продольное ускорение самолета интегрируется дважды, чтобы определить расстояние от начала выруливания на взлет. Когда достигается предварительно выбранное расстояние, дисплей в кабине пилота показывает экипажу точку для уменьшения тяги двигателя. Кроме уменьшения тяги, угол тангажа самолета уменьшается до такой степени, что самолет при значительно уменьшенной степени набора высоты ускоряется, несмотря на уменьшенную тягу, таким образом, достигая, наконец, скорости переключения для убирания закрылков.
В этой известной автоматической системе обеспечения большой подъемной силы в фазе захода на посадку предусмотрен выпуск закрылков в зависимости от расстояния до (желательного) места приземления или от непрерывно измеряемой высоты. В первом случае данные о расстоянии обеспечиваются либо инерционной навигационной системой, либо посредством оценки сигнала дальномерной системы DME. Во втором случае используется барометрическая высота, которая является явно более предпочтительной, чем истинная высота. Как режим работы, так и расстояние или высота, при которой должна быть достигнута посадочная конфигурация, указываются экипажем посредством функционального блока. Известная система предусматривает заход на посадку с непрерывным замедлением, во время которого закрылки также непрерывно перемещаются из убранного положения в посадочное положение. Как тяга двигателя, так и установочный угол регулируемого горизонтального оперения подстраиваются под соответствующее положение закрылков посредством функций предварительного регулирования. Команда по скорости для регулятора тяги корректируется в зависимости от положения закрылков. Во введенной пилотом посредством управляющего устройства скорости захода на посадку в качестве нижнего придела наконец достигается посадочная конфигурация закрылков.
Эта известная автоматическая система обеспечения большой подъемной силы связана с тем недостатком, что перед заходом на посадку пилотам приходится вручную устанавливать, какие сигналы должны быть использованы для управления автоматическим устройством для закрылков обеспечения большой подъемной силы. Ручное указание пилотами параметров управления полетом (скорость, расстояние, высота) не только увеличивает их рабочую нагрузку, но и связано с опасностью неправильного ввода. Логическая схема ухода на новый круг для случаев, в которых заход на посадку прекращается в пользу ухода на новый круг, отсутствует и, следовательно, требуется параллельное описанному автоматическому устройству устройство ручного управления.
Наконец, кроме функции, которая оказывает помощь пилоту или пилотам, содержащей сигнал для отображения на дисплее выпуска закрылков в оптимальной точке траектории захода на посадку, ЕР 1684144 А1 предлагает в качестве альтернативы использовать указанный поддерживающий сигнал для автоматического выпуска закрылков для обеспечения большой подъемной силы. Упоминается, что автоматическую функцию предпочтительно реализовывать в системе управления полетом. Для этой цели используется навигационная система, которая основана на предварительном планировании поперечных и вертикальных профилей траектории полета. Условия переключения для перехода от одной части траектории к другой, а также для формирования сигнала, который обеспечивает приведение закрылков системы в положение, которое соответствует предварительному планированию, определяются в виде высот, скоростей полета или латеральных положений самолета, или в виде комбинаций этих параметров. Если параметры состояния, которые необходимы для переключения, достигают или превышают условия переключения, средства обеспечения большой подъемной силы приводятся в положение, назначенное в соответствии с планированием.
Эта функциональность связана с тем недостатком, что она может быть применена только к фазе захода на посадку. Таким образом, автоматическое управление закрылками для обеспечения большой подъемной силы не предусмотрено во время подготовки к полету, выруливания на земле, взлета, набора высоты и крейсерского полета, ухода на новый круг после неудавшегося захода на посадку, во время посадки и во время действий на земле после посадки. Кроме того, для направления самолета по предварительно запланированной траектории полета, обязательна соответствующая навигационная информация. Если эта информация недоступна, навигационная система не работает, и поэтому функциональность для автоматического выпуска закрылков для обеспечения большой подъемной силы является недоступной.
Цель изобретения состоит в создании устройства для автоматического управления системами обеспечения большой подъемной силы самолета, которое позволяет уменьшить рабочую нагрузку на пилота или пилотов самолета в фазах полета около земли. Прежде всего, безопасность полета должна быть улучшена за счет уменьшения возможностей неправильного управления. Кроме того, должны быть улучшены летные характеристики самолета, прежде всего во время взлета и набора высоты.
Эта цель достигнута посредством устройства с признаками пункта 1 формулы изобретения.
Изобретение создает устройство для автоматического управления системой обеспечения большой подъемной силы самолета, содержащее элементы обеспечения большой подъемной силы, которые выполнены с возможностью установки в убранную и несколько выпущенных конфигураций для крейсерского полета, полета в зоне ожидания, взлета или посадки, устройство управления закрылками, которое посредством управляющей связи соединено для того, чтобы быть функционально эффективным, с системой привода элементов обеспечения большой подъемной силы, и функциональный блок, соединенный с устройством управления закрылками, для ввода управляющих команд, которые оказывают влияние на установку элементов обеспечения большой подъемной силы. Согласно изобретению устройство управления закрылками предусмотрено для расчета скоростей переключения, которые взаимосвязаны с соответствующими конфигурациями и с направлениями изменения конфигурации, для регулирования элементов обеспечения большой подъемной силы, в зависимости от данных о состоянии полета и/или дополнительных данных, существенных для управления полетом, и устройство управления закрылками предусмотрено для автоматического формирования команд на изменение конфигурации в зависимости от скорости полета и/или других данных о состоянии полета.
Согласно одному особенно предпочтительному конструктивному варианту выполнения предлагаемого устройства для автоматического управления системой обеспечения большой подъемной силой самолета дополнительно предусмотрено устройство управления закрылками для автоматического переключения режимов работы для взлета и захода на посадку, соответственно.
Другие предпочтительные конструктивные варианты и усовершенствования устройства согласно изобретению изложены в остальных подчиненных пунктах формулы изобретения.
Ниже, примерные варианты осуществления изобретения поясняются со ссылками на чертежи. Показано на:
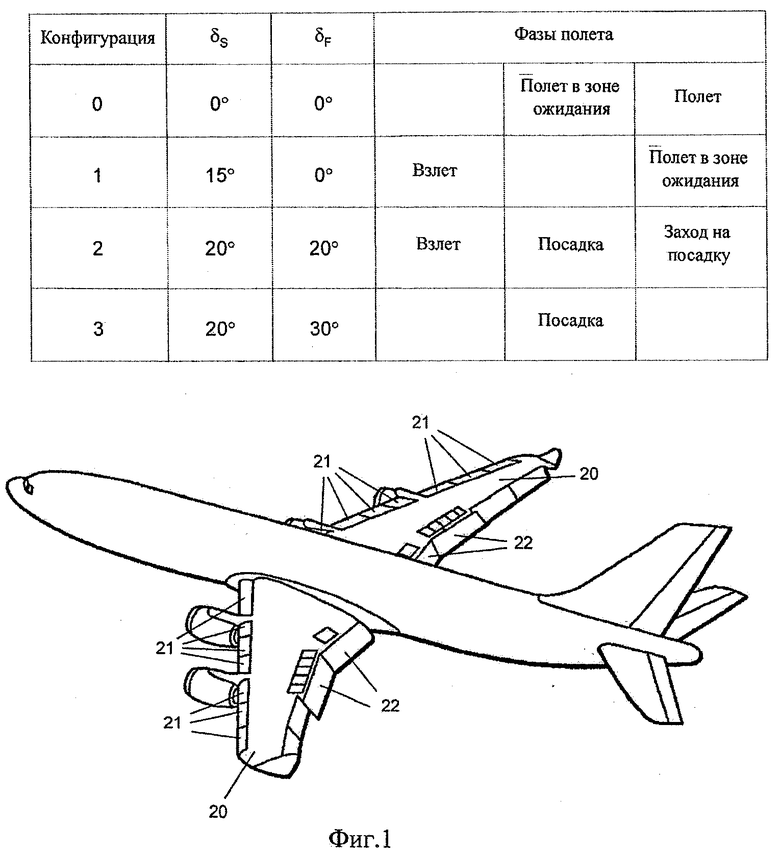
Фиг.1: схематическое изображение самолета с элементами обеспечения большой подъемной силы в виде расположенных на крыле предкрылков и закрылков,
Фиг.2: блок-схема, показывающая устройство для автоматического управления системой обеспечения большой подъемной силы самолета согласно примерному варианту осуществления изобретения вместе с другими компонентами, которые являются значимыми для функционирования системы,
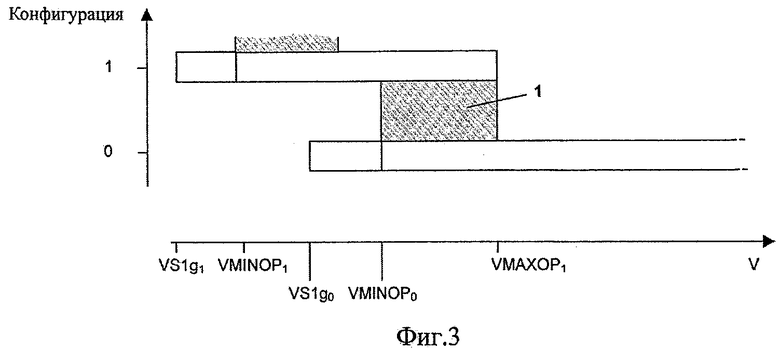
Фиг.3: диаграмма, обеспечивающая понимание используемых ниже определений скорости,
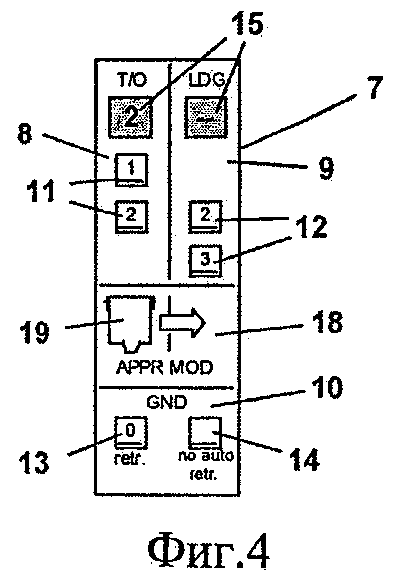
Фиг.4: вид сверху функционального блока устройства для автоматического управления системой обеспечения большой подъемной силы самолета согласно примерному варианту осуществления изобретения,
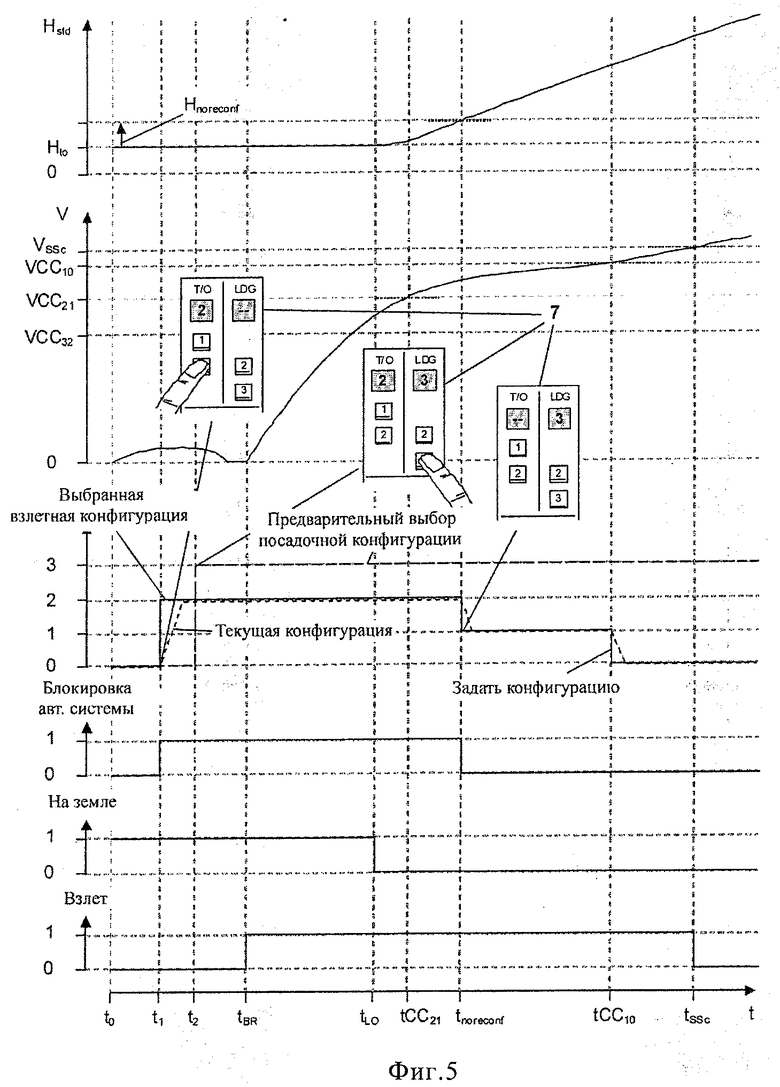
Фиг.5: временная диаграмма, показывающая изменения во времени параметров состояния и параметров управления во время взлета согласно примерному варианту осуществления изобретения,
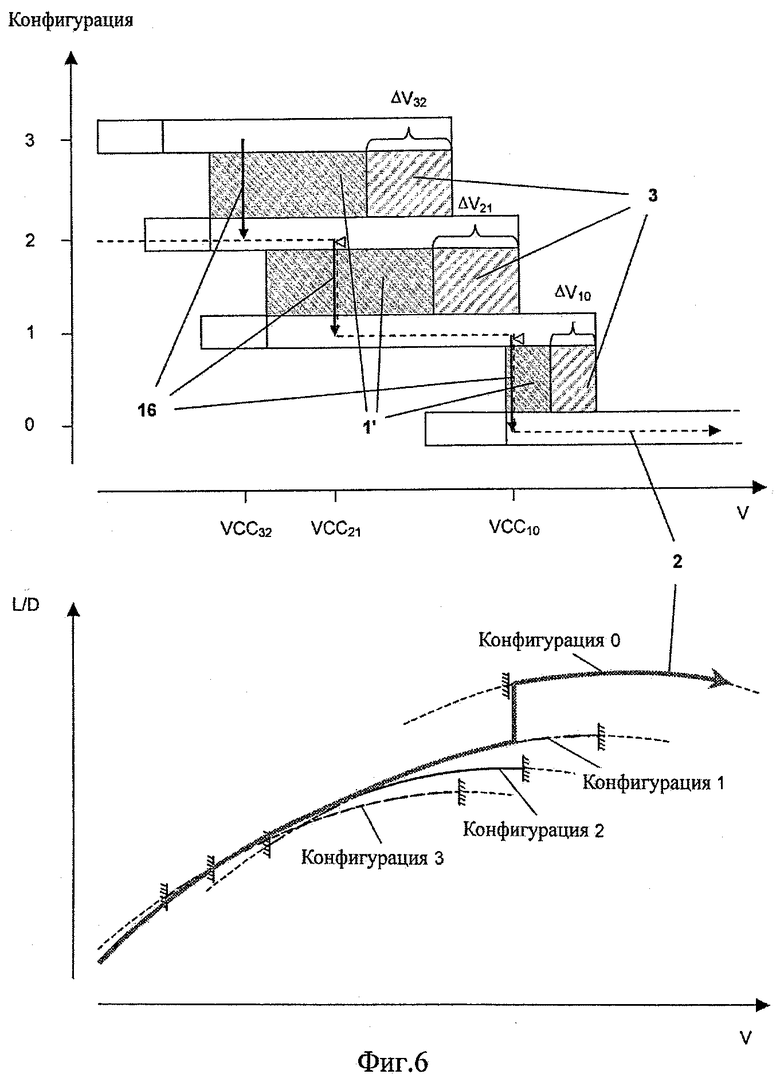
Фиг.6: диаграммы, показывающие оптимизированную по характеристикам набора высоты рабочую кривую, относящуюся к управляемому скоростью устройству для автоматического управления системой обеспечения большой подъемной силы самолета во время взлета согласно примерному варианту осуществления изобретения, а также соответствующие зависящие от скорости конфигурации закрылков,
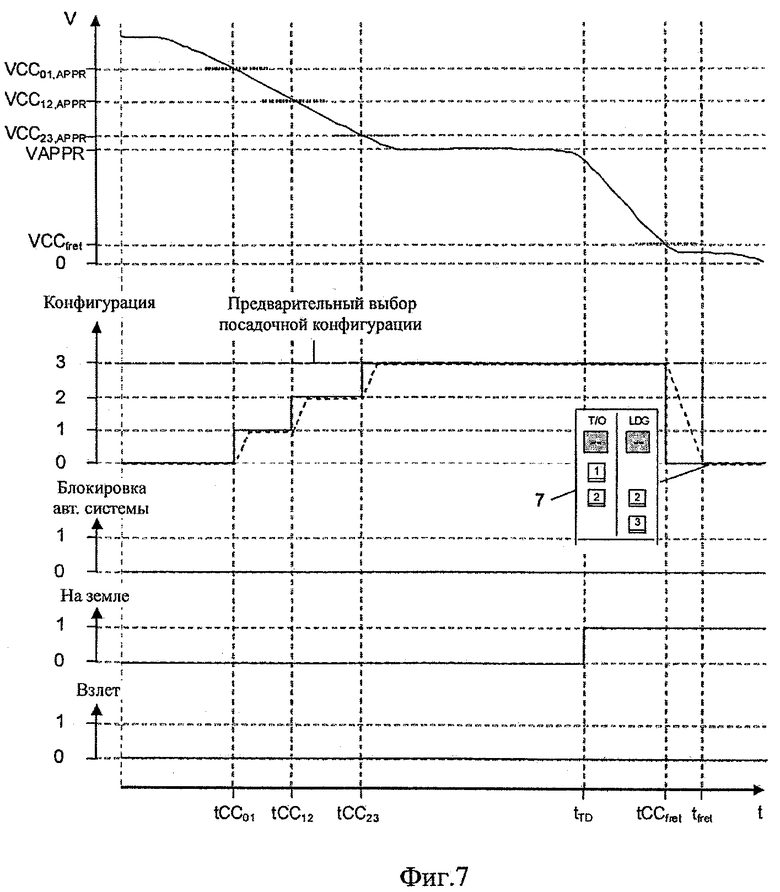
Фиг.7: диаграмма, показывающая изменения во времени параметров состояния и параметров управления во время захода на посадку, посадки и во время выруливания после посадки согласно примерному варианту осуществления изобретения,
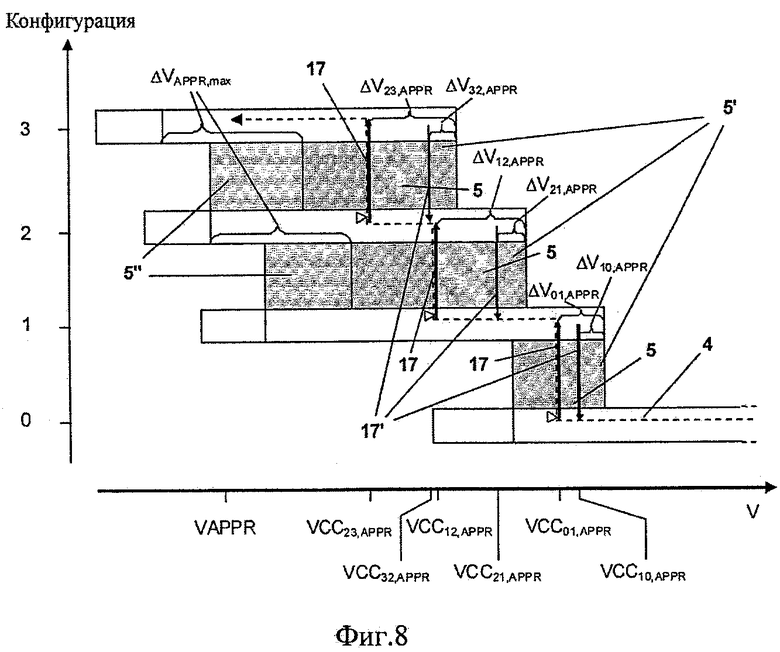
Фиг.8: диаграмма, показывающая рабочую кривую для управляемого скоростью устройства для автоматического управления системой обеспечения большой подъемной силы самолета во время захода на посадку согласно примерному варианту осуществления изобретения,
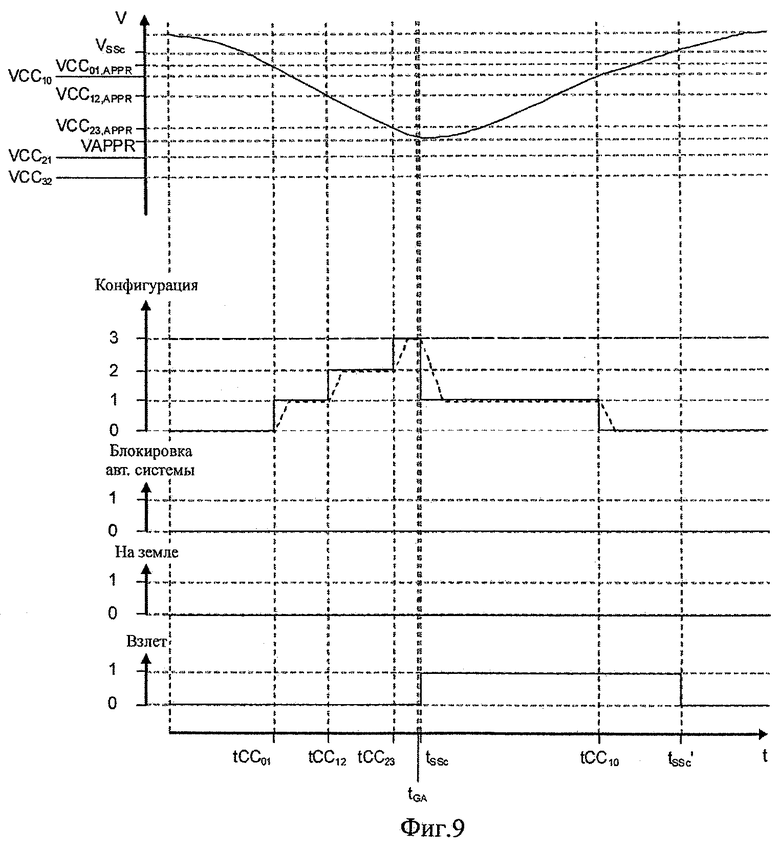
Фиг.9: диаграмма, показывающая изменения во времени параметров состояния и параметров управления во время перехода от захода на посадку к набору высоты при маневре ухода на новый круг,
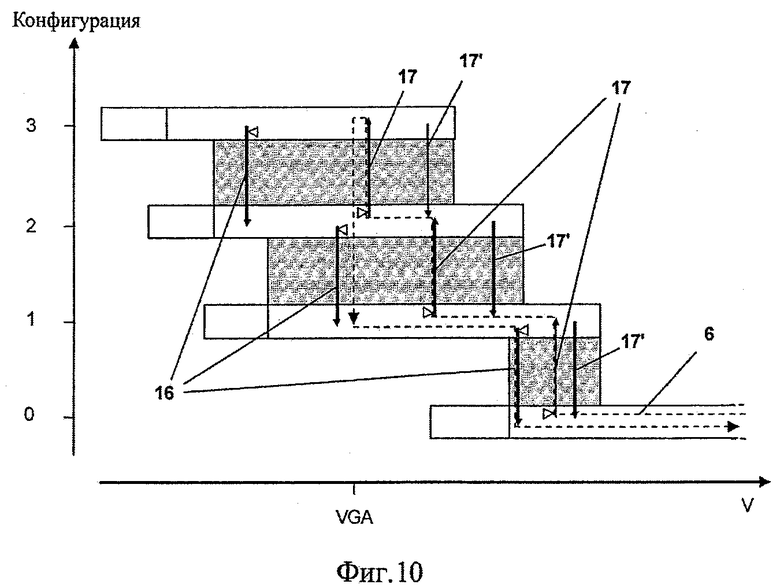
Фиг.10: диаграмма, показывающая переход от рабочей кривой для захода на посадку к рабочей кривой для взлета в случае ухода на новый круг,
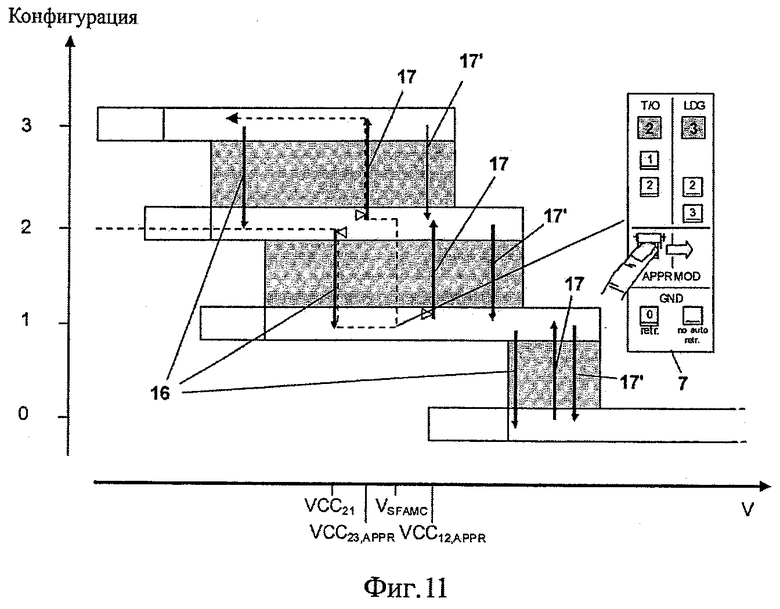
Фиг.11: диаграмма, показывающая переход от рабочей кривой для взлета к рабочей кривой для захода на посадку,
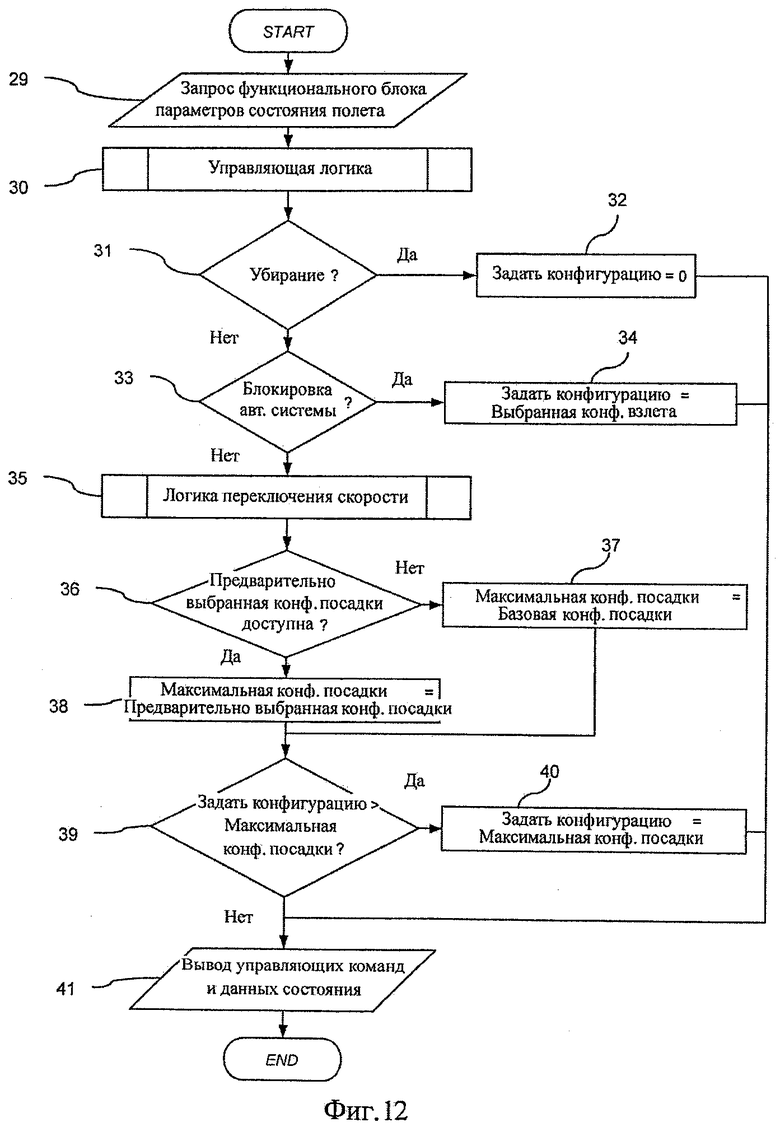
Фиг.12: упрощенная блок-схема программы автоматического управления системой обеспечения большой подъемной силы самолета согласно одному примерному варианту осуществления изобретения,
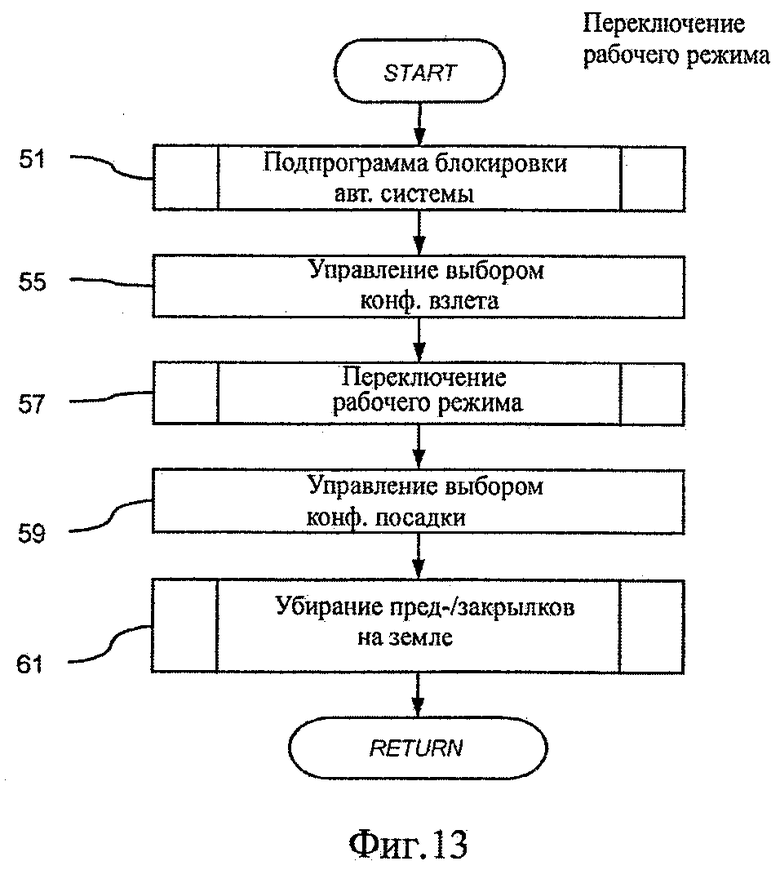
Фиг.13: упрощенная блок-схема подпрограммы, которая содержит значимые элементы схемы логического управления,
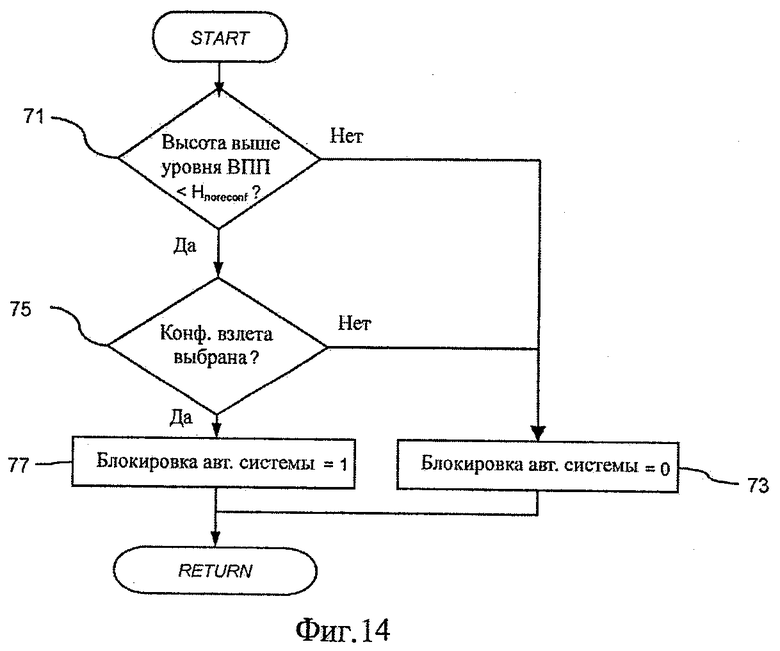
Фиг.14: блок-схема программы логической схемы, которая позволяет определять условия, в которых автоматическая система не должна действовать,
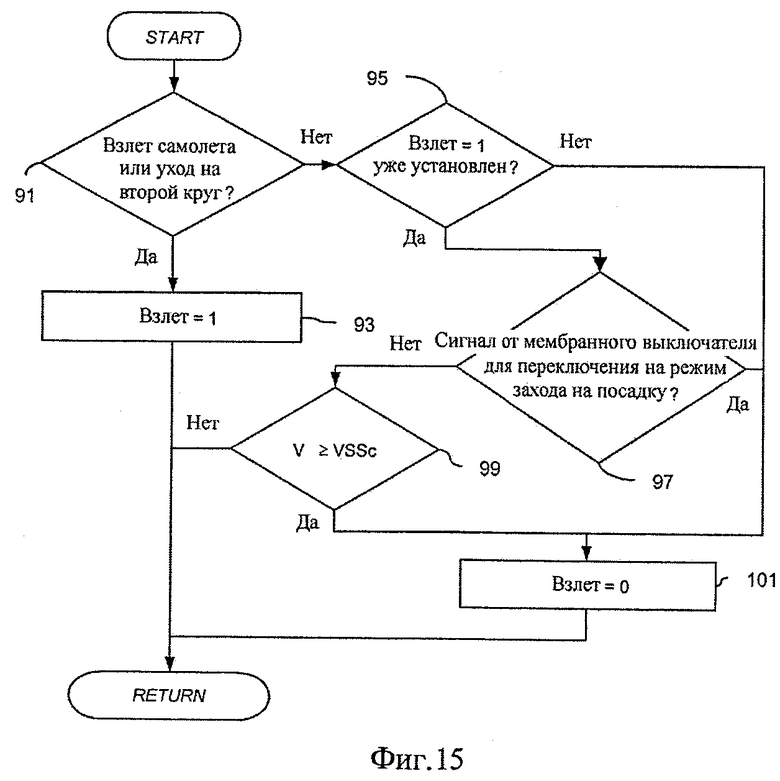
Фиг.15: блок-схема программы логической схемы для переключения режима работы,
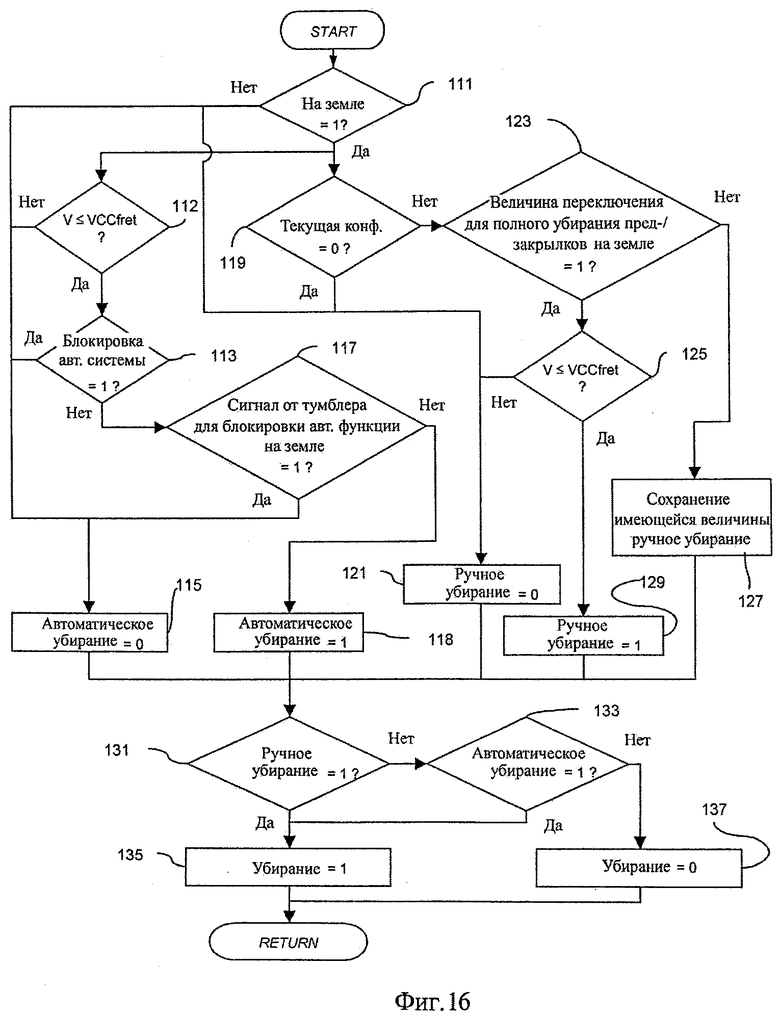
Фиг.16: блок-схема подпрограммы, которая определяет параметр, который управляет автоматическим или ручным убиранием закрылков для обеспечения большой подъемной силы на земле,
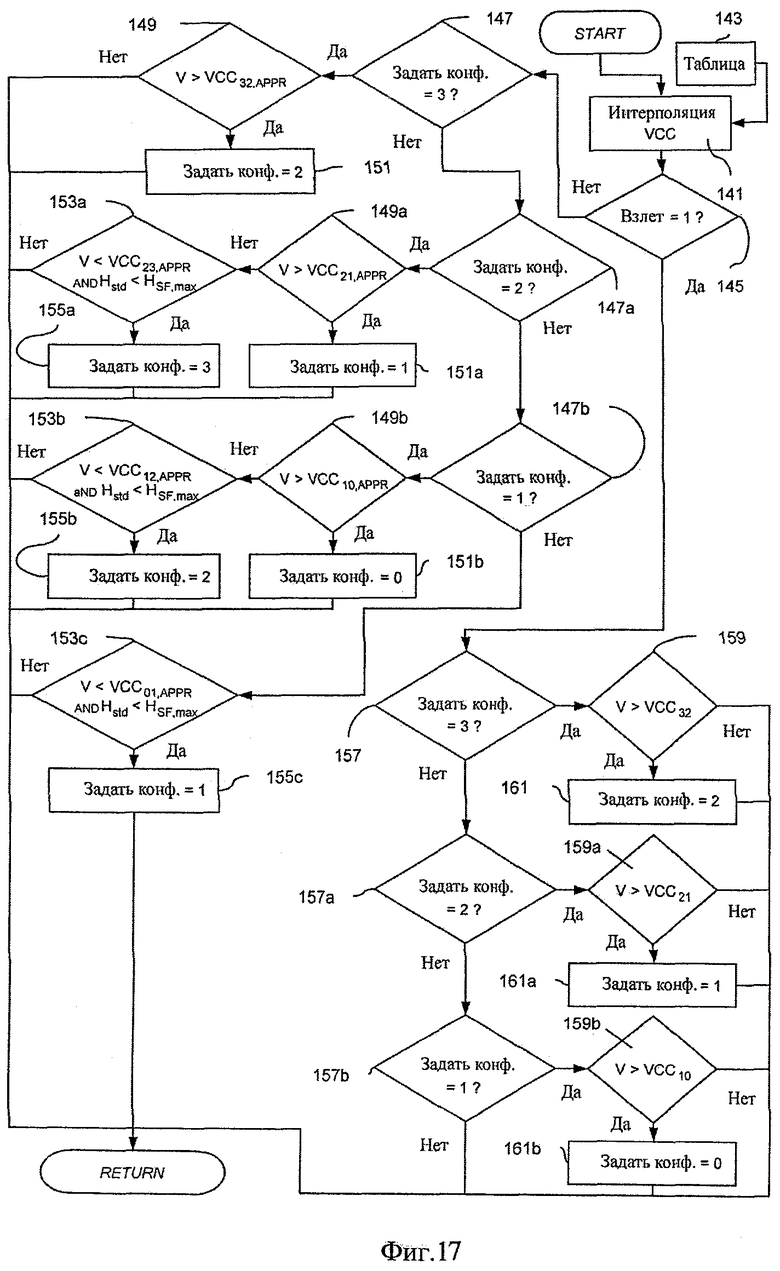
Фиг.17: блок-схема программы для логической схемы, которая определяет скорости изменения конфигурации и на основе имеющейся в данный момент времени конфигурационной команды и скорости полета в данный момент времени, а также, если это применимо, высоты полета, формирует сигналы для убирания или выпуска закрылков для обеспечения большой подъемной силы.
На фиг.1 показана часть системы обеспечения большой подъемной силы, которая расположена на крыле 20 самолета, содержащая элементы обеспечения большой подъемной силы в виде предкрылков 21 и закрылков 22. В каждом случае они являются выпускаемыми и втягиваемыми соответствующим, самим по себе известным образом посредством показанной на фиг.2 приводной системы 23, 24, которая, как правило, содержит по меньшей мере два приводных узла 23 и, кроме того, содержит механические приводные соединения 24, которые связаны с пред-/закрылками 21, 22. Управление пред-/закрылками 21, 22 для обеспечения большой подъемной силы происходит посредством показанного на фиг.2 устройства 26 управления пред-/закрылками, которое посредством управляющего соединения 25 соединено, чтобы быть функционально действующим, с приводной системой 23, 24 для регулирования элементов обеспечения большой подъемной силы, которые на фиг.2 обозначены ссылочными обозначениями 21, 22, в зависимости от управляющих команд, получаемых посредством указанных соответствующих механических соединений 24.
При реализации на основе программного обеспечения устройство 26 управления закрылками может быть частью бортового компьютера 28, который, кроме других функций 27', также содержит функции получения, обработки и передачи относящихся к управлению самолетом данных. Последние (функции) имеют ссылочное обозначение 27.
Функциональный блок 7, который соединен с устройством 26 управления закрылками, используется для установки взлетной конфигурации пред-/закрылков 21, 22 для обеспечения большой подъемной силы, предварительного выбора посадочной конфигурации и для ввода дополнительных взаимодействующих команд, которые влияют на систему автоматического управления.
На фиг.1 показана система обеспечения большой подъемной силы самолета с предкрылками 21 и закрылками 22. Однако это только примерный вариант осуществления изобретения. Система обеспечения большой подъемной силы может быть также предусмотрена и некоторым другим образом, например только с закрылками 22, в виде подвижных областей крыла, кривизна которых является непрерывно изменяемой, или каким-либо другим подходящим образом. Это выражено обозначением «элементы обеспечения большой подъемной силы». Изобретение не ограничивается системами обеспечения большой подъемной силы, в которых сочетаются предкрылки 21 и закрылки 22.
Управляющее соединение 25 между устройством 26 управления закрылками и приводной системой 23, 24, с одной стороны, содержит передачу совместно используемых команд для установки предкрылков 21 и закрылков 22 в соответствующие желаемые положения, которые в сводке согласно таблице на первой странице иллюстраций обозначены как «конфигурации», а с другой стороны, содержит передачу ответной реакции на устройство 26 управления закрылками в виде принятой пред-/закрылками 21, 22 конфигурации.
В описываемом в данный момент примерном конструктивном варианте система обеспечения большой подъемной силы включает n=4 дискретные конфигурации, обозначенные цифрами 0, 1, 2 и 3. Однако в других примерных конструктивных вариантах система может также включать другое число, либо большее, либо меньшее, конфигураций. Таблица на странице 1 иллюстраций содержит примерные комбинации возможных углов δS отклонения предкрылков 21 и δF закрылков 22, комбинация которых называется «конфигурациями». Приводная система 23 назначает указанные командами взаимосвязанные с соответствующими конфигурационными спецификациями устройства 26 управления закрылками положения для предкрылков и закрылков согласно таблице. Кроме того, таблица содержит назначение конфигураций для отдельных фаз полета для данного примерного конструктивного варианта.
Для описания автоматического управления пред-/закрылками 21, 22 для обеспечения большой подъемной силы является полезным определение скоростей, которые важны в контексте соответствующей, принятой пред-/закрылками 21, 22 для обеспечения большой подъемной силы конфигурации. Индикаторная земная скорость на основе измерения данных воздушного пространства используется в качестве основной сравнительной количественной величины для управления системой обеспечения большой подъемной силы самолета, которая содержит пред-/закрылки 21, 22 для обеспечения большой подъемной силы. Перед ее дальнейшим использованием, сигнал, который представляет скорость полета, сглаживается посредством низкочастотного фильтра, для того чтобы компенсировать краткосрочные помехи сигналу, которые могут быть вызваны, например, турбулентностью.
Как при убранных, так и при выпущенных пред-/закрылках 21, 22 нормальный рабочий диапазон самолета ограничен предельными рабочими скоростями. Со ссылкой на пример двух смежных конфигураций системы 21, 22 обеспечения большой подъемной силы фиг.3 иллюстрирует положения отдельных скоростей.
В конфигурации 0, как предкрылки 21, так и закрылки 22, находятся в полностью убранном положении, что соответствует полетному положению. В конфигурации 1, пред-/закрылки 21, 22 находятся в выпущенном состоянии, при этом, как уже было упомянуто выше, в принципе неважно, являются ли в этом положении выпущенными предкрылки 21 или закрылки 22, или задействована комбинация предкрылков и закрылков или других элементов обеспечения большой подъемной силы.
При скорости VS1g1 поток на крыле 20 в конфигурации 1 приводит к сваливанию, если подъемная сила самолета соответствует весу самолета (кратное число нагрузки n=1). По существу, скорость зависит от фактической массы самолета, а также от числа Маха. При прибавлении запаса надежности к VS1g1 получается (верхняя) минимальная рабочая скорость VMINOP1 для конфигурации 1.
Вообще говоря, указанный запас надежности обычно определяется посредством множителей kj, так что
VMINOPi=kj·VS1gi,
где i означает индекс для отдельных конфигураций, а индекс j означает различные множители, которые, однако, в зависимости от конфигурации, также могут принимать различные значения в зависимости от фазы полета.
Нормальный рабочий диапазон конфигурации 1 в верхнем направлении ограничен максимальной скоростью VMAXOP1.
Определения скоростей VS1g0 и VMINOP0 в полетной конфигурации 0 аналогичны определениям VS1g1 и VMINOP1 в конфигурации 1.
Заштрихованная область 1 означает диапазон скоростей, в котором скорости обеих конфигураций 0 и 1 находятся в нормальных рабочих диапазонах, другими словами, как в конфигурации 1, так и в конфигурации 0 имеется достаточная сила подъема для безопасного управления полетом. Имеется также максимальная рабочая скорость в конфигурации 0, другими словами, на верхнем конце диапазона крейсерской скорости с полностью убранными пред-/закрылками 21, 22, однако, указанная максимальная рабочая скорость не имеет значения для системы автоматического управления системой обеспечения большой подъемной силы.
В дальнейшем описании будут рассмотрены следующие сценарии:
- подготовка к взлету, взлет и набор высоты,
- заход на посадку, посадка, управление самолетом после посадки на земле,
- полет в зоне ожидания,
- уход на новый круг от участка захода на посадку или уход на новый круг после касания взлетно-посадочной полосы («критическая ситуация»),
- прекращение набора высоты и полета с ускорением после взлета с непосредственно следующим заходом на посадку.
Предполагается, что все системы самолета полностью функциональны.
На фиг.4 показан примерный конструктивный вариант функционального блока 7 описанной автоматической системой обеспечения большой подъемной силы. Функциональный блок содержит секцию 8 для задания взлетной конфигурации (Т/О), секцию 9 для предварительного выбора посадочной конфигурации (LDG), секцию 18 для переключения с взлетного режима на режим захода на посадку автоматической системы и секцию 10 для дополнительных функций управления на земле. Отдельные взлетные конфигурации могут быть выбраны с помощью кнопок 11, предусмотренных в панели 8 управления оператора для выбора взлетной конфигурации. Соответственно, кнопки 12 позволяют предварительно выбирать посадочные конфигурации в панели 9 управления оператора для предварительного выбора посадочной конфигурации. Цифровые дисплеи 15 предусмотрены для отображения соответствующих величин для подтверждения сделанного выбора. В показанном на фиг.4 примере для взлета была выбрана конфигурация 2, но никакой посадочной конфигурации предварительно выбрано не было.
Предусмотренная в панели 10 управления оператора для функций управления на земле кнопка 13 позволяет втягивать устройства для обеспечения большой подъемной силы на земле. Тумблер 14 используется в качестве блокировки автоматической системы, в активированном состоянии указанный тумблер 14 позволяет предотвратить автоматическое убирание пред-/закрылков 21, 22 после посадки. Коммутационное состояние блокировки 14 автоматической системы показывается встроенным в тумблер световым индикатором. Когда кнопочный выключатель 19 в панели управления оператора для переключения 18 активирован, в полете может быть произведено явное прямое переключение с взлетного рабочего режима на режим захода на посадку автоматической системы в случае, если сразу после взлета должен произойти заход на посадку и посадка, а скорость полета еще пока недостаточна для того, чтобы произошло предусмотренное автоматическое переключение рабочего режима. Для предотвращения непреднамеренной активации выключатель 19 может быть закрыт откидной крышкой.
Дополнительная информация о текущем состоянии системы, прежде всего об автоматически или вручную заданной желаемой конфигурации и текущем положении предкрылков 21 и закрылков 22, а также информация о любых сбоях системы предоставляется экипажу посредством обычных дисплейных устройств в кабине пилота, которые сами по себе не являются частью изобретения.
На фиг.5 показано изменение во времени параметров состояния и параметров управления во время подготовки к взлету, во время взлета и во время набора самолетом высоты.
Когда самолет стоит на месте или выруливает на земле, необходимое взлетное положение пред-/закрылков 21, 22 задается пилотом вручную с помощью кнопок 11 секции 8 функционального блока 7 (ср. фиг.4). В показанном примере это конфигурация 2 (ср. фиг.5).
Убирание элементов 21, 22 обеспечения большой подъемной силы на земле возможно, если необходимо, посредством нажима на кнопку 13 панели 10 управления функциями наземного управления функционального блока 7, при этом система возвращается в исходное состояние.
Для того чтобы предотвратить преждевременное убирание закрылков во время взлета, параметр «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» устанавливается на величину 1 посредством выбора взлетной конфигурации.
В настоящем примерном варианте осуществления выполнение сигналов положений закрылков автоматического устройства переключения закрылков предотвращается до тех пор, пока сигнал «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» не переключится на величину ноль. В настоящем примерном варианте осуществления переключение сигнала «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» на ноль происходит после того, как достигнута высота над уровнем взлетной полосы, которая соответствует предварительно определенной величине Hnoreconf.
В других примерных вариантах осуществления точка переключения блокировки автоматической системы может быть также связана с другими условиями или их комбинациями, например уборкой шасси после прохождения определенного расстояния от точки начала движения на взлетной полосе, или после установки переключателя «НА ЗЕМЛЕ» на ноль. Сигнал «НА ЗЕМЛЕ» определяется известным образом, например с помощью датчика на основе направленного внутрь пружинящего действия стоек главного шасси самолета. Если стойка шасси подвергается направленному наружу пружинящему действию в результате снятия нагрузки во время взлета, этот сигнал устанавливается на величину ноль.
Кроме того, является возможным, что переключение параметра «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» происходит лишь после того, как прошло некоторое время выдержки после возникновения необходимого условия или условий переключения.
Предпочтительно, уже перед взлетом при t2 посредством кнопок 12 секции 9 функционального блока 7 производится (предварительный) выбор конфигурации, которая рассматривается как подходящая, пред-/закрылков 21, 22 для захода на посадку и посадки в намеченном месте назначения. В показанном примере это конфигурация 3 (ср. фиг.5). Если необходимо, этот выбор может быть скорректирован вручную экипажем во время полета под любые изменяющиеся условия захода на посадку (ветер, траектория). Чтобы уменьшить тяжесть последствий каких-либо ошибок оператора, в описанном ниже режиме захода на посадку пред-/закрылки 21, 22 приводятся в зависимости от скорости в конфигурацию, которая обычно предусматривается для посадки, если не произошел ручной предварительный выбор.
Посредством установки тяги при взлете на момент времени tBR формируется соответствующий сигнал, и происходит автоматическое переключение параметра «ВЗЛЕТ» с величины ноль на величину 1, что соответствует переключению с режима захода на посадку на режим взлета. В этой конфигурации переключения для взлета используются скорости изменения конфигурации.
Самолет разгоняется на взлетной полосе до тех пор, пока он не взлетит при tLO. Вскоре после этого, в показанном на фиг.5 примере достигается первое условие переключения для убирания закрылков из конфигурации 2 в конфигурацию 1 при tCС21. Однако блокировка автоматической системы предотвращает исполнение сигнала для убирания пред-/закрылков 21, 22.
Когда достигнута высота Hnoreconf, параметр «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» устанавливается на величину 0. Тогда, все еще действительный сигнал для убирания пред-/закрылков 21, 22 из конфигурации 2 в конфигурацию 1 в момент времени tnoreconf приводится в автоматическое исполнение.
Сразу после переключения задания на управление происходит непрерывная проверка следующего условия переключения, что формирует управляющую команду на конфигурацию ноль, когда скорость достигает величины больше чем VCC10.
Это условие переключения достигается при tCC10, и формируется сигнал, который переводит пред-/закрылки 21, 22 в полностью убранную конфигурацию 0 для крейсерского полета.
В настоящем примерном варианте осуществления, при превышении скорости VSSc сигнал «ВЗЛЕТ» переключается с величины 1 на величину 0. Скорость VSSc является большей из двух скоростей VCC10 или VCC01,APPR, последняя из которых определена для выпуска пред-/закрылков 21, 22 из полностью убранной конфигурации в первую выпущенную конфигурацию в режиме захода на посадку автоматической системы.
На фиг.6 схематически показан пример того, каким образом могут быть определены скорости VCCi+1,i переключения (i=0, …, n-1, n - индекс самой высокой конфигурации, в настоящем примере 3), которые приводят к максимально возможному соотношению между подъемной силой L и лобовым сопротивлением D (аэродинамическое качество) в течение взлета и набора высоты, приводя таким образом к максимально возможным скоростям набора высоты (в случае идеализированной движущей силы воздушного винта) или градиентам набора высоты (в случае идеализированной движущей силы турбореактивного двигателя). Для данной массы самолета аэродинамическое качество зависит от скорости и от конфигурации обеспечения большой подъемной силы, а также от конфигурации ходовой части (шасси). Кроме того, показанные внизу на фиг.6 условия изменяются с изменением числа Маха в полете, но в меньшей степени. В зависимости от характеристики движущей силы и желаемой степени подлежащих оптимизации эксплуатационных характеристик, скорости переключения могут быть также определены на основе кривых качественных мер отличных от аэродинамического качества.
Траектория 2 на фиг.6 показывает благоприятную комбинацию скоростей изменения конфигурации, то есть скоростей самолета во время его ускорения, в которых происходит изменение или переключение между отдельными конфигурациями. Эта комбинация используется как пример для пояснения определения этих скоростей, в которых регулируются положения пред-/закрылков 21, 22. Эти скорости переключения или скорости изменения конфигурации определяются таким образом, что изменение на ближайшую меньшую конфигурацию инициируется, когда аэродинамическое качество в последующей конфигурации больше, чем в настоящей конфигурации. Для практической реализации автоматической системы подходящие скорости изменения предпочтительно интерполируются из таблицы специфических для самолета величин в зависимости от массы самолета в данный момент времени. В качестве альтернативы этому, данные в зависимости от массы самолета и высоты полета, или в зависимости от массы самолета и числа Маха в полете могут также храниться в памяти. Кроме того, в других вариантах осуществления учитывается положение шасси в данный момент времени.
В описываемом примерном варианте осуществления должно быть выполнено условие, при котором скорости изменения конфигурации всегда находятся в перекрывающихся областях 1', которые образуются совместно используемыми рабочими диапазонами 1 скорости в каждом случае двух смежных конфигураций обеспечения большой подъемной силы, и в то же время учитываются дополнительные запасы 3 по скорости.
При составлении таблиц скорости переключения для автоматического управления учитываются запасы ΔVi+1,i по скорости, которые обозначены ссылочным обозначением 3, которые дополнительно задают верхний предел скоростей изменения конфигурации. Посредством учета надлежащим образом определенных запасов 3 по скорости предотвращается риск превышения максимальных скоростей VMAXOP. Такие ограничения становятся эффективными, если бы скорости изменения конфигурации, определенные в соответствии с критериями характеристик полета, были выше пределов.
Вертикальные стрелки 16 в верхней части фиг.6 обозначают скорости изменения конфигурации в рабочем режиме «ВЗЛЕТ» автоматической системы. Если измеренная и пропущенная через фильтр низких частот индикаторная земная скорость превышает скорость изменения конфигурации, при которой элементы обеспечения большой подъемной силы или пред-/закрылки 21, 22 перемещаются в более убранное положение, формируется сигнал, который заставляет элементы 21, 22 втягиваться в следующее более низкое положение. В описываемом примерном варианте осуществления, предусмотрено только убирание пред-/закрылков 21, 22 для взлета, но не выпуск. Однако в других вариантах осуществления может быть также предусмотрен автоматический повторный выпуск пред-/закрылков 21, 22 при падении скорости ниже скоростей изменения конфигурации для выпуска. Без переключения рабочего режима, эти скорости изменения конфигурации должны быть ниже, чем скорости или равны скоростям изменения конфигурации для убирания пред-/закрылков 21, 22.
Зачастую, имеется максимальная высота HSF,max, при которой пред-/закрылки 21, 22 самолета могут быть выпущены. При наличии такой максимальной рабочей высоты и при нахождении пред-/закрылков в выпущенном состоянии, при превышении этой высоты, экипажу выдается акустическое и визуальное предупреждение в сочетании с соответствующей рекомендацией на предусмотренном для этого дисплейном устройстве на увеличение скорости полета для того, чтобы автоматическая система могла обеспечить убирание пред-/закрылков. В то время как сигналы для убирания пред-/закрылков 21, 22 реализуются всегда, сигналов на выпуск выше максимальной рабочей высоты HSF,max не формируется.
Аналогичным фигуре 5 образом, на фиг.7 показаны диаграммы изменений параметров, которые являются значимыми в отношении описываемой автоматической системы обеспечения большой подъемной силы, за исключением того отличия, что на фиг.7 рассматриваются рабочие фазы захода на посадку и посадки, а также действия на земле после посадки.
После снижения с высоты полета при скорости выше, чем скорость VCC01,APPR изменения конфигурации, самолет замедляется, что может происходить либо на участке захода на посадку постоянной высоты, либо при легком снижении. Если скорость падает ниже VCC01,APPR при tCC01, выдается сигнал на выпуск пред-/закрылков 21, 22 из конфигурации 0, полетной конфигурации, в первую выпущенную конфигурацию 1. Дальнейшее замедление самолета постепенно ведет к падению ниже скоростей VCC12,APPR и VCC23,APPR изменения конфигурации, которые приводят к выпуску пред-/закрылков 21, 22 вплоть до предварительно выбранной посадочной конфигурации. Затем заход на посадку продолжается с постоянной конфигурацией и скоростью VAPPR захода на посадку до выравнивания и приземления при tTD, при этом сигнал «НА ЗЕМЛЕ», который уже был описан выше, изменяется с величины 0 на величину 1.
Если скорость самолета снижается до уровня ниже VCCfret, пред-/закрылки 21, 22 полностью втягиваются. Акустический сигнал и текстовое сообщение на предусмотренном для этой цели дисплейном устройстве кабины информируют экипаж о том, что в тот момент закрылки автоматически полностью втягиваются и что уже невозможно выполнить обычный маневр ухода на новый круг без повторного ввода взлетной конфигурации. В другом варианте осуществления это условие может также иметь место с использованием истинной скорости самолета относительно точки, соотнесенной с землей. Когда пред-/закрылки 21, 22 полностью убраны, в момент времени tfret формируется соответствующий сигнал, и величина для предварительного выбора управления для захода на посадку стирается.
На фиг.8 показаны рабочие кривые, которые относятся к режиму захода на посадку. Функция объясняется со ссылкой на показанную траекторию 4 скорости, которая зеркально отражает показанную на фиг.7 часть изменения во времени захода на посадку до тех пор, пока не будет достигнута VAPPR. В показанном примерном варианте осуществления определяются скорости 17 изменения конфигурации, по отношению к верхним пределам VMAXOPi+1, посредством отдельных дифференциальных скоростей ΔVi,i+1,APPR (i=0, …, n-1), которые являются результатом суммы областей, обозначенных ссылочными обозначениями 5 и 5'. Эти дифференциальные скорости выбираются образом, специфическим для самолета и специфическим для конфигурации.
Запас до верхних пределов конфигураций с соответствующим ближайшим более высоким индексом обеспечивает то, что поддерживается достаточная дистанция до скоростей 17' переключения, при этом при превышении верхних пределов инициируется пошаговое убирание закрылков и/или предкрылков 21, 22. Функциональность убирания объединяет уже известные защитные функции, которые снижают риск чрезмерных нагрузок, имеющих место на пред-/закрылках при уменьшении отклонения пред-/закрылков, с эксплуатационной необходимостью того, что в режиме захода на посадку, то есть «ВЗЛЕТ»=0, конфигурации могут быть уменьшены даже без превышения максимальных рабочих скоростей VMAXOP. На фиг.8 запасы по скорости, которые также определяют эти скорости переключения относительно максимальных рабочих скоростей, называются ΔVi+1,i,APPR и характеризуются ссылочным обозначением 5'. Поскольку ожидается, что число случаев, в которых используется функциональность убирания, будет невелико, запас 5' до максимальных рабочих скоростей предпочтительно является небольшим.
Кроме того, скорости 17 изменения конфигурации или величины ΔVi,i,+1,APPR определены таким образом, что падение до уровня ниже VMINOP, в зависимости от степеней замедления, которые типичны для соответствующих конфигураций, и влияния порывов ветра, является маловероятным, но тем не менее обеспечивается достаточная гистерезисная дистанция 5 до скоростей убирания режима захода на посадку. В связи с сильным влиянием, которое шасси оказывает на лобовое сопротивление, целесообразно учитывать положение шасси при определении этих величин.
Если скорости изменения конфигурации склонны к расположению в верхней области скоростного диапазона 1, то тогда конфигурация не только увеличивается уже при относительно высоких скоростях, но и в среднем лобовое сопротивление при заходе на посадку также является высоким, что определенно может быть желательным для усиления замедления самолета до скорости захода на посадку.
В других примерных вариантах осуществления также возможно, что определение скоростей 17 изменения конфигурации будет происходить в соответствии с аспектами характеристик полета, как уже было рассмотрено в контексте определения скоростей 16 переключения для взлетного рабочего режима автоматической системы. Таким образом могут быть реализованы заходы на посадку с особо низким лобовым сопротивлением и, тем самым, низким расходом топлива и низким уровнем шума.
Решение относительно того, какое из двух вышеупомянутых решений является предпочтительным, главным образом зависит от способа захода на посадку, то есть от выбранных вспомогательных средств захода на посадку и системы наведения, характеризуемого профилем высоты и профилем скорости полета.
Кроме того, скорость изменения конфигурации, которая приводит элементы 21, 22 обеспечения большой подъемной силы в предусмотренную для посадки конфигурацию должна быть выше, чем минимальная рабочая скорость конфигурации, на которую происходит изменение, плюс запас 5" скорости. Размер этого запаса ΔVAPPR,max скорости является результатом специфически необходимых для данного самолета добавлений к базовой скорости для ветра и турбулентности для окончательного захода на посадку. Это правило предотвращает ситуацию, в которой скорость изменения конфигурации, которая обеспечивает переход на посадочную конфигурацию, ниже скорости VAPPR захода на посадку.
В зависимости от массы самолета и скоростных требований в полете в зоне ожидания может быть необходим выпуск пред-/закрылков 21, 22 при полете в зоне ожидания. Настоящий примерный вариант осуществления не предусматривает рабочий режим, предназначенный только для полета в зоне ожидания. Вместо этого, зависящий от скорости выпуск пред-/закрылков согласно фиг.8 происходит в режиме захода на посадку. Если скорость падает до уровня ниже VCC01,APPR, пред-/закрылки 21, 22 перемещаются из убранного состояния 0 в ближайшее выпущенное положение 1. Без требования изменения рабочего режима, при превышении скорости VCC10,APPR переключения пред-/закрылки возвращаются обратно в конфигурацию «ноль».
Ниже, работа автоматической системы во время перехода от захода на посадку к фазе ухода на новый круг будет пояснена со ссылкой на показанную на фиг.9 последовательность во времени. При увеличении тяги до величины, предусмотренной для ухода на новый круг, что на фиг.9 происходит в момент времени tGA, устанавливается сигнал для ухода на новый круг. В других примерных вариантах осуществления установка сигнала ухода на новый круг может зависеть от дополнительных условий, например условие, согласно которому дополнительно должна присутствовать положительная степень набора высоты, или что пред-/закрылки 21, 22 должны находиться по меньшей мере в первой выпущенной конфигурации. На фиг.10 показана траектория 6 скорости во время маневра вместе со скоростями переключения. Как только появляется сигнал ухода на новый круг, происходит переключение рабочего режима устройства для автоматического переключения закрылков с захода на посадку на взлет (момент времени tSSc на фиг.9), при этом параметр «ВЗЛЕТ» переводится с 0 на 1. Поскольку в настоящем примере текущая скорость V в этот момент времени превышает VCC32 и VCC21, формируется сигнал, который обеспечивает убирание пред-/закрылков 21, 22 в конфигурацию 1. При ускорении самолета до скорости, которая превышает VCC10, начиная с момента tСC10, закрылки полностью убраны. Если превышается VSSc в момент времени tSSc', наконец происходит переключение с взлетного режима обратно на режим захода на посадку.
Описанная последовательность, соответственно, также применима к случаю, когда самолет уже приземлился, но скорость не упала до уровня ниже VCCfret.
В особом случае, в котором самолет вскоре после взлета совершает переход к заходу на посадку и самолет еще не ускорился до скорости, превышающей или равной VSSc, пилот должен вручную произвести переключение с взлетного режима на режим захода на посадку автоматической системы нажатием на кнопку 19. В других вариантах осуществления устройства для автоматического управления системой обеспечения большой подъемной силы может быть возможным обходиться без этого ручного ввода, если помимо управляемого скоростью автоматического переключения добавляется альтернативное условие, которое может состоять, например, в том, что пропущенная через низкочастотный фильтр степень набора высоты падает до уровня ниже предварительно определенной пороговой величины.
На показанной на фиг.11 диаграмме переключение происходит в момент, характеризуемый скоростью VSFAMC полета. В этом процессе самолет сначала находится в конфигурации 1. Однако, поскольку текущая скорость ниже скорости VCC12,APPR изменения конфигурации, сразу после переключения выдается сигнал на выпуск пред-/закрылков в конфигурацию 2. Чтобы экипаж мог оценить, нужно ли, а если нужно, то на сколько шагов, выпускать элементы 21, 22 после активации кнопки 19 для переключения, на дисплейном устройстве для пилота или пилотов отображается команда на позиционирование закрылков, ожидаемая при скорости в данный момент времени в режиме автоматического захода на посадку.
В соответствии с нормальным поведением в режиме захода на посадку, в случае дальнейшего замедления и падения скорости до уровня ниже VCC23,APPR происходит переход в конфигурацию 3, если эта конфигурация была предварительно выбрана в качестве посадочной конфигурации. Если предварительно посадочная конфигурация не была выбрана и скорость падает ниже уровня VCC23,APPR, тогда элементы 21, 22 обеспечения большой подъемной силы тем не менее перемещаются в конфигурацию 3, если она была предусмотрена в качестве базовой установки, что предполагается в настоящем примерном варианте осуществления.
Если решение совершить посадку отменяется, то переход от режима захода на посадку обратно к взлетному режиму может происходить в соответствии с процессом, описанным выше в контексте ухода на новый круг.
Поскольку реализация автоматического управления системой обеспечения большой подъемной силы может происходить либо в аналоговой, либо в цифровой архитектуре ЭВМ, далее понятия «сигнал» и «параметр» используются как синонимы. Автоматическая система управления может быть предусмотрена либо как программный модуль, либо как аппаратный модуль общей системы управления. Однако согласно примерному варианту осуществления автоматическая система управления предпочтительно реализована как программа в принятой цифровой архитектуре ЭВМ устройства 26 управления закрылками.
Упрощенная схема такой программы показана на фиг.12. Программа внедрена в среду реального времени и вызывается периодически через определенные промежутки времени, несколько раз в секунду.
Сначала, в блоке 29 от обозначенного ссылочным обозначением 27 модуля запрашиваются состояние функционального блока 7 и параметры состояния полета, необходимые для коммутирующей логики. В управляющей логике 30 определяются состояния параметров управления, которые влияют на поведение устройства для автоматического переключения закрылков. Затем, точка 31 ветвления запрашивается относительно наличия или отсутствия сигнала на полное убирание закрылков на земле. В первом случае команда «ЗАДАТЬ КОНФИГУРАЦИЮ» в блоке 32 устанавливается на величину 0. Во втором случае точка 31 ветвления запрашивается, имеет ли сигнал «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» величину 1. Если это так, в шаге 34 программы команда «ЗАДАТЬ КОНФИГУРАЦИЮ» устанавливается на предварительно выбранную вручную величину для взлетной конфигурации. Если результат блока 33 является логически неправильным, характеризуемым выводом «НЕТ», вызывается логика 35 переключения скорости, которая формирует новую величину для управляющей команды «ЗАДАТЬ КОНФИГУРАЦИЮ» в зависимости от величины этого параметра во время вызова, и в зависимости от массы самолета, текущего рабочего режима, индикаторной земной скорости V и высоты относительно области стандартного давления. В ветви 36 происходит проверка, доступна ли действительная величина «ПРЕДВАРИТЕЛЬНО ВЫБРАТЬ ПОСАДОЧНУЮ КОНФИГУРАЦИЮ», то есть конфигурация, которая была выбрана вручную посредством переключателей 12 функционального блока 7. Если это так, то параметр «МАКСИМАЛЬНАЯ ПОСАДОЧНАЯ КОНФИГУРАЦИЯ» в блоке 38 устанавливается на величину «ПРЕДВАРИТЕЛЬНО ВЫБРАННАЯ ПОСАДОЧНАЯ КОНФИГУРАЦИЯ». Если предварительно выбранная величина не доступна, начиная с ветви 36, принимается обозначенный как «НЕТ» путь прогона программы, и в блоке 37 параметр «МАКСИМАЛЬНАЯ ПОСАДОЧНАЯ КОНФИГУРАЦИЯ» устанавливается на величину базовой установки для посадочной конфигурации. В дальнейшей последовательности программы ветвь 39 обеспечивает то, что результат блока 35 не превышает величину максимальной посадочной конфигурации. Если заданная величина для конфигурации выше максимальной величины для посадочной конфигурации, то команда «ЗАДАТЬ КОНФИГУРАЦИЮ» в блоке со ссылочным обозначением 40 ограничивается максимальной величиной для посадочной конфигурации. Управляющая команда передается в блок 41 для выполнения регулировки пред-/закрылков 21, 22. Кроме того, параметры состояния системы управления выводятся в целях их отображения на дисплее, и на функциональный блок формируется ответная реакция.
На фиг.13 показана упрощенная схема логики управления, вызов которой в главной программе (фиг.12) обозначен ссылочным обозначением 30. В свою очередь, логика управления последовательно вызывает дальнейшие подпрограммы или шаги процесса. В последовательности диаграммы, под ссылочным обозначением 51 указан вызов подпрограммы для формирования сигнала «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» (фиг.14), который требуется в точке 33 ветвления главной программы. Блок под ссылочным обозначением 55 содержит процессы, которые, с одной стороны, требуются для стирания величины выбранной взлетной конфигурации после взлета и которые, с другой стороны, обеспечивают то, что любая активация переключателей 11 в момент времени, когда активация либо не планируется, либо не требуется, не приводит к нежелательному поведению автоматической системы обеспечения большой подъемной силы. Сигнал «ВЗЛЕТ» является результатом подпрограммы для переключения рабочего режима (фиг.16), вызов которой происходит под ссылочным обозначением 57, при этом этот сигнал требуется для формирования задания на управление для пред-/закрылков 21, 22 в подпрограмме, вызванной из главной программы (фиг.12) под ссылочным обозначением 35, которая (подпрограмма) содержит логику скорости (фиг.17). Последующий блок 59 содержит процессы для сохранения или стирания заданий посадочной конфигурации. Наконец, под ссылочным обозначением 61 вызывается подпрограмма (фиг.16), которая может генерировать сигнал, который управляет убиранием элементов 21, 22 обеспечения большой подъемной силы на земле, и которая используется в точке ветвления под ссылочным обозначением 31 главной программы.
На фиг.14 показана схема для подпрограммы «ПОДПРОГРАММА БЛОКИРОВКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ» для оценки блокировки автоматической системы. В точке 71 ветвления происходит проверка, находится ли самолет все еще ниже определенной высоты Hnoreconf. Если ответом на запрос ветви 71 является «ДА», выполняется дальнейший запрос на ветви 75, была ли выбрана действительная взлетная конфигурация. Если это так, то параметр сигнала «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» в блоке под ссылочным обозначением 77 устанавливается на величину «ноль» или логически истинную. Если ответом на один из этих двух запросов 71 или 75 является «НЕТ», тогда в шаге 73 процесса сигнал «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» устанавливается на величину «ноль», что соответствует логически неверному.
На фиг.15 показана подпрограмма «ПЕРЕКЛЮЧЕНИЕ РАБОЧЕГО РЕЖИМА». Модуль 91 определяет, установлен ли сигнал для ухода на новый круг. Если это так, то в блоке 93 параметр «ВЗЛЕТ» устанавливается на величину «ноль». Если на входе модуля 91 нет сигнала для ухода на новый круг, то происходит ветвление для запроса 95, при этом определяется, имеет ли параметр «ВЗЛЕТ» уже величину «ноль». Если это так, то в блоке 97 происходит проверка, имеется ли сигнал от мембранного выключателя для переключения на режим 19 захода на посадку. Если и это не так, то, наконец, в блоке 99 происходит проверка, достигла ли или превысила ли текущая скорость полета скорость для автоматического переключения рабочего режима VSSc. Другими словами, если автоматическая система находится в рабочем режиме «ВЗЛЕТ», если нет сигнала от переключателя 19, и если скорость VSSc еще не достигнута, то происходит возврат к программе вызова без изменения величины параметра «ВЗЛЕТ». В блоке 101 величина «ВЗЛЕТ» может быть установлена не ноль, что означает, что устройство для автоматического управления системой обеспечения большой подъемной силы находится в предусмотренном для захода на посадку рабочем режиме или переходит в этот рабочий режим. Это происходит, когда после запроса на блоке 95 последовательность программы следует по обозначенной как «НЕТ» ветви или следует по ветвям, которые на выходе ветви 97 или 99 обозначены как «ДА».
На фиг.16 показана схема подпрограммы, которая управляет убиранием пред-/закрылков 21, 22 на земле. Первое ветвление происходит в блоке 111 в зависимости от сигнала «НА ЗЕМЛЕ». Если самолет не на земле, параметры «АВТОМАТИЧЕСКОЕ УБИРАНИЕ» в блоке 115 и «РУЧНОЕ УБИРАНИЕ» в блоке 121 устанавливаются на НОЛЬ. Если самолет на земле, последовательность операций следует по первой ветви, в которой проверяются условия для установки сигнала на автоматическое убирание закрылков на земле, при этом эта последовательность операций начинается на ветви 112, и по второй ветви, которая проверяет условия для ручного убирания закрылков на земле и которая начинается с ветви 119. Ветвь для автоматического управления начинается с запроса в блоке 112, является ли скорость V меньшей или равной предусмотренной для убирания закрылков максимальной скорости VCCfret. Если да, то в 113 происходит запрос, является ли величина параметра «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» единицей. Если это не так и если в ветви 117 нет сигнала от тумблера на блокировку функции автоматической системы на земле 14, то параметр «АВТОМАТИЧЕСКОЕ УБИРАНИЕ» в блоке 118 устанавливается на величину «единица». Если произведено нажатие на тумблер 14 и если соответствующий сигнал является единицей, автоматическое убирание устройств для обеспечения большой подъемной силы на земле подлежит блокированию, и в блоке под ссылочным обозначением 115 параметр «АВТОМАТИЧЕСКОЕ УБИРАНИЕ» устанавливается на ноль. Этот же шаг 115 запрашивает, дает ли проверка условия переключения в точках 111 или 112 ветвления «НЕТ», другими словами находится ли самолет в воздухе или скорость на земле все еще высока. Если нет ни того, ни другого условия, но если сигнал «БЛОКИРОВКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ» установлен на ноль, что приводит к положительному ответу на запрос в блоке 113, тогда 115 также выполняется. В последнем случае самолет находится в фазе подготовки к взлету или в фазе выруливания на взлет.
Параллельно обработка идет по еще одной ветви, которая начинается с запроса 119, находятся ли пред-/закрылки 21, 22 уже в полностью убранном положении. Если это так, то в блоке под ссылочным обозначением 121 параметр «РУЧНОЕ УБИРАНИЕ» устанавливается на ноль. За отрицательным результатом на запрос 119, в блоке 123 следует запрос, относящийся к величине 13 переключения для полного убирания закрылков на земле, и в положительном случае - ветвление к блоку 125. Если скорость V самолета в это время ниже или равна VCCfret, то в блоке 129 параметр «РУЧНОЕ УБИРАНИЕ» устанавливается на величину «единица». В другом случае, если скорость высока, в 125 происходит ветвление к блоку 121, и параметру «РУЧНОЕ УБИРАНИЕ» придается значение «ноль». Если нажатие на переключатель 13 не произведено и, следовательно, сигнал равен нулю, происходит ветвление от 123 к блоку 127, что означает, что имеющаяся в начале подпрограммы величина параметра «РУЧНОЕ УБИРАНИЕ» сохраняется. Дальнейшее выполнение подпрограммы происходит посредством проверки параметра «РУЧНОЕ УБИРАНИЕ» в точке 131 ветвления. Если закрылки должны быть убраны, то в блоке 135 сигнал «УБРАТЬ» устанавливается на величину «единица». Если сигнал на ручное убирание закрылков отсутствует, то в блоке 133 происходит проверка, установлен ли сигнал на автоматическое убирание пред-/закрылков 21, 22, и в соответствии с булевым значением происходит ветвление к блоку 135 или, если пред-/закрылки 21, 22 не должны быть убраны, происходит ветвление к блоку 137.
Логика переключения скоростей, в связи с которой показана схема программы на фиг.17, является существенным элементом изобретения. После начала выполнения подпрограммы, сначала из таблицы 143 посредством интерполяционной маршрутизации в модуле 141 определяются скорости VCC изменения конфигурации в зависимости от фактической массы самолета.
Если устройство для автоматического управления системой обеспечения большой подъемной силы находится в рабочем режиме «ВЗЛЕТ», то запрограммированная последовательность в ветви 145 направляется к соответствующей, обозначенной как «ДА» ветви. Если относящаяся к конфигурации «ЗАДАТЬ КОНФИГУРАЦИЮ» управляющая команда имеет величину 3, то в ветви 157 запрограммированная последовательность направляется на проверку условия переключения скорости в блоке 159. Следование по этой ветви имеет значение только в случае ухода на новый круг, потому что в настоящем примерном варианте осуществления конфигурация 3 не предусмотрена для взлета. Если скорость V превышает скорость VCC32 изменения конфигурации, то в блоке под ссылочным обозначением 161 величина «ЗАДАТЬ КОНФИГУРАЦИЮ» устанавливается на величину 2, другими словами, пред-/закрылки 21, 22 должны быть убраны на один шаг изменения конфигурации. Если это не так, то настоящая величина 3 команды «ЗАДАТЬ КОНФИГУРАЦИЮ» сохраняется, и происходит возврат к главной программе. Относящиеся к первоначальным заданиям 2 и 1 конфигурации под ссылочными обозначениями 157а или 157b запросы происходят аналогично, с полностью аналогичной проверкой условий переключения скорости в 159а или 159b, и, если это применимо, установка новых, измененных заданий в 161а или 161b. Поскольку в рабочем режиме взлета увеличение в конфигурации не предусмотрено, для конфигурации 0 ветви отсутствует.
Если устройство для автоматического управления системой обеспечения большой подъемной силы находится не в рабочем режиме взлета, а вместо этого в режиме захода на посадку («ВЗЛЕТ»=0), в ветви 145 запрограммированная последовательность направляется к ветви, обозначенной как «НЕТ». Аналогично запросу в блоке 157, проверка, имеет ли параметр «ЗАДАТЬ КОНФИГУРАЦИЮ» значение 3, происходит в ветви 147. Если результат положительный и если скорость превышает скорость VCC32,APPR изменения конфигурации для убирания пред-/закрылков 21, 22 из задания конфигурации 3 с самым большим выпуском к конфигурации 2, что проверяется в обозначенном ссылочным обозначением 149 блоке ветвления, в блоке 151 параметр «ЗАДАТЬ КОНФИГУРАЦИЮ» устанавливается на величину 2. Если параметр «ЗАДАТЬ КОНФИГУРАЦИЮ» имел величину 2 уже в начале подпрограммы, то в точке 147а ветвления запрограммированная последовательность направляется к ветви 149а. Там происходит аналогичная 149 проверка. В случае, если скорость V полета в данный момент времени не превышает VCC21,APPR, что вызвало бы убирание пред-/закрылков 21, 22 посредством установки параметра «ЗАДАТЬ КОНФИГУРАЦИЮ» на величину 1 в блоке 151а, в блоке 153а происходит проверка, является ли V меньшей, чем VCC23,APPR и, кроме того, является ли высота в данный момент времени меньшей, чем максимальная рабочая высота самолета с выпущенными пред-/закрылками 21, 22. Если оба условия возвращают логически истинный результат, вызывается блок 155а, и параметр «ЗАДАТЬ КОНФИГУРАЦИЮ» устанавливается на величину 3.
Дальнейшие программные шаги последовательности запросов под ссылочным обозначением 147b происходят аналогично 147 и 147а, ветвь 149b формулируется аналогично 149 и 149а, запросы 153b и 153с - аналогично 153а, шаг 151b программы - аналогично 151 и 151а, а шаги 155b и 155с - аналогично 155а. Наконец, в каждом случае происходит возврат к главной программе.
За счет уменьшения необходимого ввода со стороны пилота в вышеописанном способе автоматического управления системой обеспечения большой подъемной силы риск неправильного ручного управления, включая опущение операций, снижается. Подходящие взлетные или посадочные конфигурации для устройств обеспечения большой подъемной силы определяются обычным, известным образом, в зависимости от расчета взлетных характеристик для взлетной полосы, а также в зависимости от расчета посадочных характеристик для запланированной взлетной полосы в месте назначения. Эти две конфигурации вводятся вручную перед взлетом с помощью функционального блока 7. В то время как управляющий сигнал для взлетной конфигурации выполняется немедленно, предварительный выбор для посадки сохраняется в памяти. Лишь в немногих случаях будет необходимо изменение предварительного выбора посадочной конфигурации во время подготовки к заходу на посадку в результате изменения граничных условий, которые могут быть вызваны, например, изменением на взлетно-посадочной полосе или изменением ветра. Для обычного управления пассажирским или транспортным самолетом, за исключением вышеупомянутого случая, во время полета экипаж полностью освобожден от ручного управления системой обеспечения большой подъемной силы самолета.
Настоящее изобретение также связано с тем преимуществом, что учитываются связанные с управлением системой обеспечения большой подъемной силы особые случаи управления самолетом. Прежде всего, следует упомянуть явно выраженный учет случая ухода на новый круг, для которого автоматический процесс полностью описан до сих пор не был. Поскольку в этом случае в основном можно предположить повышенную рабочую нагрузку на экипаж, автоматическая система согласно изобретению обеспечивает значительное облегчение рабочей нагрузки, что также способствует повышению безопасности самолета.
Дифференциация между различными рабочими кривыми для вылета и захода на посадку позволяет значительно улучшить приближение к оптимальным параметрам полета по сравнению с тем, которое было бы достигнуто с помощью совместно используемой рабочей кривой. Кроме того, зависящее от фазы полета переключение рабочих режимов обеспечивает потенциал для улучшенного спокойствия эксплуатации, потому что можно в значительной степени избежать чередующихся сигналов управления для убирания и выпуска закрылков, что может иметь место в случае временного колебания скорости полета вокруг отдельных условий переключения для убирания и выпуска закрылков. Критерии переключения самих рабочих режимов сформулированы таким образом, что быстро сменяющие друг друга изменения в командах исключены. Тем не менее для обычной эксплуатации система не содержит никаких элементов задержки, так что любое изменение в конфигурации производится сразу при возникновении условия переключения. Кроме того, явно выраженное переключение рабочих режимов обеспечивает возможность в значительной степени независимого определения, с одной стороны, условий переключения для убирания пред-/закрылков после взлета, а с другой стороны, условий переключения для выпуска пред-/закрылков во время захода на посадку перед посадкой. Это является значительным отличием по сравнению с упомянутым во введении, зависимым от скорости устройством для автоматического переключения закрылков согласно DE 2531799 С3, в котором такое поведение может быть достигнуто только при ручной регулировке пилотом во время полета. Во время обычной эксплуатации в настоящем изобретении с помощью функционального блока 7 задаются только взлетная конфигурация и посадочная конфигурация. Для дополнения вышеуказанного имеется переключающее устройство 19 для перехода от взлетного режима на режим захода на посадку. Однако указанное переключающее устройство 19 требует активации только в случае особых последовательностей управления. То же самое относится и к ручному управлению системы пред-/закрылков на земле и к переключателю 14, который предотвращает автоматическое убирание пред-/закрылков 21, 22 на земле.
Реальное функционирование автоматической системы обеспечения большой подъемной силы основано на ограниченном числе параметров состояния полета, из которых самыми важными являются индикаторная земная скорость и оценочная величина массы самолета в данный момент времени, таким образом усовершенствуя простую концепцию зависимого от скорости полета управления пред-/закрылков 21, 22. Однако, в отличие от известных зависимых от скорости автоматических систем переключения закрылков US 2350751 или DE 2531799 С3, определение скоростей изменения конфигурации самолета происходит таким образом, что поддерживаются относящиеся к пороговым рабочим скоростям запасы по скорости. И по этой причине тоже изобретение способствует повышению безопасности полета. Для оптимизации моментов переключения в связи с отдельными требованиями различных фаз полета требуется дополнительный параметр, который позволяет проводить различие между соответствующими рабочими режимами. Для целей переключения рабочих режимов вышеописанный примерный вариант осуществления предусматривает сигнал, который показывает, находится ли самолет в фазе взлета или в фазе ухода на новый круг. Кроме того, требуется сигнал высоты, который относится к фиксированной базовой высоте или области давления.
Вышеупомянутые параметры состояния полета дополняются сигналом земли и сигналом, относящимся к конфигурации пред-/закрылков 21, 22 в данный момент времени. Поскольку все указанные сигналы имеют фундаментальное значение для управления большим современным самолетом, соответствующие компоненты для формирования этих сигналов отличаются очень высокой эксплуатационной надежностью. В этом отношении предложенная здесь автоматическая система управления отличается от систем, работа которых основана на данных планирования полета и навигационных данных, как в случае с US 4042197 или ЕР 1684144 А1, потому что, как правило, возможность использования их сигналов значительно ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| КРЫЛО САМОЛЕТА | 1998 |
|
RU2148526C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ, СПОСОБ ЕГО УПРАВЛЕНИЯ И СИСТЕМА ИНДИКАЦИИ ПО УГЛУ АТАКИ САМОЛЕТА | 2010 |
|
RU2442724C1 |
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2752104C1 |
| СПОСОБ УЛУЧШЕНИЯ МАНЕВРЕННЫХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА В ПРОЦЕССЕ ОСУЩЕСТВЛЕНИЯ ЗАКЛЮЧИТЕЛЬНОЙ ФАЗЫ ЗАХОДА НА ПОСАДКУ ПЕРЕД ПРИЗЕМЛЕНИЕМ И ПОСЛЕДУЮЩЕГО ВЫРАВНИВАНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2384874C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2021 |
|
RU2805888C2 |
| СВЕРХЗВУКОВОЙ ПРЕОБРАЗУЕМЫЙ САМОЛЕТ С Х-ОБРАЗНЫМ КРЫЛОМ | 2015 |
|
RU2621762C1 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
Изобретение относится к системам автоматического управления обеспечения большой подъемной силы самолета с помощью пред-/закрылок (21, 22), которые выполнены с возможностью установки в различные конфигурации: для крейсерского полета, полета в зоне ожидания, взлета или посадки. Система состоит из устройства управления пред-/закрылками (26), которое посредством управляющего соединения (25) соединено с приводной системой (23, 24) пред-/закрылок (21, 22), и функционального блока (7), который соединен с устройством (26) управления пред-/закрылками для ввода рабочих команд, управляющих установкой пред-/закрылок (21, 22). Устройство (26) управления пред-/закрылками предназначено для расчета соответствующих конфигураций пред-/закрылок (21, 22), направления конфигурационного изменения, рабочих режимов скоростей переключения, взаимосвязанных с автоматизированными компонентами регулирования пред-/закрылок (21, 22) в зависимости от данных о состоянии полета и/или других существенных для управления полетом данных, при этом устройство (26) управления пред-/закрылками может также выполнять автоматическое переключение рабочих режимов для взлета и захода на посадку, и предусмотрено для автоматического формирования команд, обуславливающих изменение конфигурации в зависимости от скорости полета. Обеспечивается повышение надежности и оптимизация режимов взлёта и посадки. 2 н. и 19 з.п. ф-лы, 17 ил.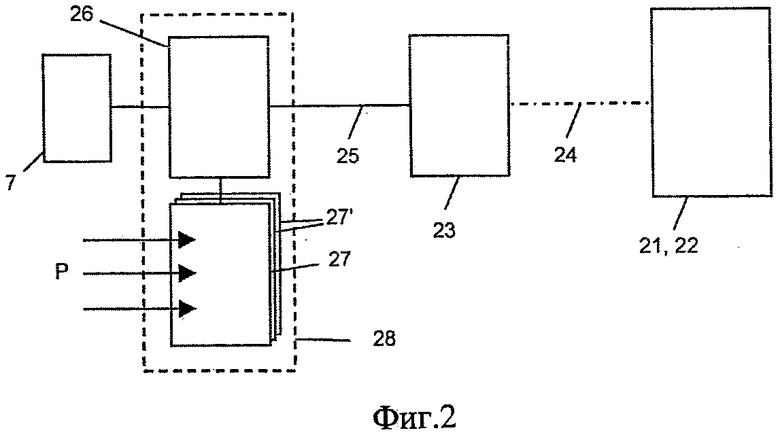
1. Устройство для автоматического управления системой обеспечения большой подъемной силы, содержащее элементы (21, 22) обеспечения большой подъемной силы, которые выполнены с возможностью установки в убранную и несколько выпущенных конфигураций для крейсерского полета, взлета или посадки, устройство (26) управления пред-/закрылками, которое посредством управляющего соединения (25) соединено для того, чтобы быть функционально действующим, с приводной системой (23, 24) элементов (21, 22) обеспечения большой подъемной силы, и функциональный блок (7), соединенный с устройством (26) управления пред-/закрылками для ввода рабочих команд, которые влияют на установку элементов (21, 22) обеспечения большой подъемной силы, отличающееся тем, что устройство (26) управления пред-/закрылками предусмотрено для расчета соответствующих конфигураций элементов (21, 22) обеспечения большой подъемной силы и направлений конфигурационного изменения взаимосвязанных скоростей переключения для регулировки элементов (21, 22) обеспечения большой подъемной силы в зависимости от данных о состоянии полета и/или других существенных для управления полетом данных, устройство (26) управления пред-/закрылками предусмотрено для автоматического формирования команд, которые обуславливают изменение конфигурации в зависимости от скорости полета, и устройство (26) управления пред-/закрылками дополнительно предусмотрено для автоматического переключения рабочих режимов для взлета и захода на посадку соответственно.
2. Устройство по п.1, отличающееся тем, что функциональный блок (7) предусмотрен для отдельного ввода, для взлета и для захода на посадку предварительно выбранной конфигурации, которая соответствует желательному максимальному увеличению подъемной силы, и/или для отдельного ввода, для взлета и посадки, нескольких различных конфигураций.
3. Устройство по п.2, отличающееся тем, что функциональный блок (7) содержит отдельные панели (8, 9) управления оператора для выбора взлетной конфигурации и для предварительного выбора посадочной конфигурации.
4. Устройство по п.3, отличающееся тем, что на панелях (8, 9) управления оператора для выбора взлетной конфигурации и для предварительного выбора посадочной конфигурации в каждом случае предусмотрены индивидуальные кнопки (11, 12), которые взаимосвязаны с каждой конфигурацией.
5. Устройство по п.2, отличающееся тем, что функциональный блок (7) содержит отдельные визуальные дисплеи (15), взаимосвязанные с панелями (8, 9) управления оператора для выбора взлетной конфигурации и для предварительного выбора посадочной конфигурации, причем дисплеи (15) предусмотрены для отображения соответственно сделанного предварительного выбора конфигурации.
6. Устройство по п.1, отличающееся тем, что функциональный блок (7) содержит панель (18) управления оператора с элементом (19) активации для прямого ручного переключения между рабочим режимом взлета и рабочим режимом захода на посадку автоматической системы управления, при этом устройство (26) управления пред-/закрылками формирует команды, которые обуславливают изменение конфигурации в соответствии с введенным вручную рабочим режимом.
7. Устройство по п.1, отличающееся тем, что функциональный блок (7) содержит еще одну панель (10) управления оператора для функций наземного управления с элементами (13, 14) управления для ручного ввода команд исполнительного механизма для элементов (21, 22) обеспечения большой подъемной силы на земле.
8. Устройство по п.7, отличающееся тем, что панель (10) управления оператора для функций наземного управления содержит панель (13) управления оператора для убирания элементов (21, 22) обеспечения большой подъемной силы на земле, при этом устройство (26) управления пред-/закрылками предусмотрено только для выполнения команды, которая была введена при наличии соответствующего разрешающего сигнала, и/или что панель (10) управления оператора для функций наземного управления содержит элемент (14) управления, который предотвращает автоматическое убирание элементов (21, 22) обеспечения большой подъемной силы после посадки на землю.
9. Устройство по п.8, отличающееся тем, что в элементе (14) управления, который предусмотрен для блокировки функции автоматической системы на земле, предусмотрено визуальное дисплейное устройство, которое показывает состояние переключения.
10. Устройство по п.1, отличающееся тем, что устройство (26) управления пред-/закрылками предусмотрено для установки параметра, до отмены которого не происходит автоматического убирания элементов (21, 22) обеспечения большой подъемной силы во время выруливания на взлет и первоначального резкого набора высоты до тех пор, пока не будет достигнута заданная высота над уровнем взлетно-посадочной полосы.
11. Устройство по п.1, отличающееся тем, что устройство (26) управления пред-/закрылками предусмотрено для установки параметра «ВЗЛЕТ», посредством которого обеспечивается создание тяги для взлета или тяги для ухода на новый круг, при этом этот параметр показывает, что устройство (26) управления пред-/закрылками работает в рабочем режиме взлета или начинает работать после перехода из режима захода на посадку в рабочий режим взлета.
12. Устройство по п.11, отличающееся тем, что устройство (26) управления пред-/закрылками предусмотрено для сброса параметра «ВЗЛЕТ» при превышении скорости, которая в режиме захода на посадку, который автоматически применим в этот момент времени, не приводит к немедленному выпуску пред-/закрылков (21, 22), и/или тем, что устройство (26) управления пред-/закрылками предусмотрено для сброса параметра «ВЗЛЕТ», если сглаженный сигнал, относящийся к скорости набора высоты, падает ниже заданной пороговой величины.
13. Устройство по п.1, отличающееся тем, что скорости переключения или скорости (16, 17, 17') изменения конфигурации, которые взаимосвязаны с соответствующими конфигурациями элементов (21, 22) обеспечения большой подъемной силы, рассчитываются посредством специфических для рабочего режима весовых коэффициентов и в соответствии с весовыми коэффициентами, дифференцированными в соответствии с направлениями изменения конфигураций, с учетом запасов по скорости или дифференциальных скоростей (3, 5, 5', 5''), относящихся к рабочим пределам управления, которые имеются в соответствии с условиями в данный момент времени и/или должны быть ожидаемы в связи с другими конфигурациями обеспечения большой подъемной силы.
14. Устройство по п.1, отличающееся тем, что скорости (16, 17, 17') изменения конфигурации, которые взаимосвязаны с соответствующими конфигурациями элементов (21, 22) обеспечения большой подъемной силы, определены посредством конкретных дифференциальных скоростей, относящихся к рабочим пределам, которые должны быть ожидаемы в связи с отдельными конфигурациями при данных о состоянии полета в данный момент времени и других данных, существенных для управления полетом, с учетом запасов по скорости или дифференциальных скоростей (3, 5, 5', 5'').
15. Устройство для автоматического управления системой обеспечения большой подъемной силы, содержащее элементы (21, 22) обеспечения большой подъемной силы, которые выполнены с возможностью установки в убранную и несколько выпущенных конфигураций для крейсерского полета, взлета или посадки, устройство (26) управления пред-/закрылками, которое посредством управляющего соединения (25) соединено для того, чтобы быть функционально действующим, с приводной системой (23, 24) элементов (21, 22) обеспечения большой подъемной силы, и функциональный блок (7), соединенный с устройством (26) управления пред-/закрылками для ввода рабочих команд, которые влияют на установку элементов (21, 22) обеспечения большой подъемной силы, отличающееся тем, что устройство (26) управления пред-/закрылками предусмотрено для расчета соответствующих конфигураций элементов (21, 22) обеспечения большой подъемной силы и направлений конфигурационного изменения взаимосвязанных скоростей переключения для регулировки элементов (21, 22) обеспечения большой подъемной силы в зависимости от данных о состоянии полета и/или других данных, существенных для управления полетом, устройство (26) управления пред-/закрылками предусмотрено для автоматического формирования команд, которые обуславливают изменение конфигурации в зависимости от скорости полета, и устройство (26) управления пред-/закрылками предусмотрено, при отсутствии предварительного выбора, сделанного посредством функционального блока (7), для автоматического перемещения элементов (21, 22) обеспечения большой подъемной силы во время захода на посадку в конфигурацию, обычно предусмотренную для посадки, при изменении соответствующей зависящей от скорости конфигурации или выполнении условий переключения.
16. Устройство по п.15, отличающееся тем, что скорости изменения переключения или скорости (16, 17, 17') изменения конфигурации, которые взаимосвязаны с соответствующими конфигурациями элементов (21, 22) обеспечения большой подъемной силы, соответствующие рабочие режимы, и зависящие от различного веса самолета направления изменения конфигурации хранятся в форме таблицы в устройстве (26) управления пред-/закрылками.
17. Устройство по п.16, отличающееся тем, что скорости переключения или скорости изменения конфигурации дополнительно хранятся дифференцированным образом в соответствии с высотой полета или числом Маха в полете.
18. Устройство по п.16, отличающееся тем, что, кроме того, скорости переключения или скорости изменения конфигурации хранятся в зависимости от различных положений шасси.
19. Устройство по п.18, отличающееся тем, что скорости переключения или скорости (16) изменения конфигурации определены с учетом запасов (3) по скорости, относящихся к максимальным рабочим скоростям в соответствующих конфигурациях обеспечения большой подъемной силы, и/или что скорости переключения или скорости (17, 17') изменения конфигурации были определены на основе запасов (5, 5') по скорости, относящихся к максимальным рабочим скоростям, а также согласно скоростям захода на посадку, которые должны рассматриваться как максимальные скорости захода на посадку в соответствующих конфигурациях элементов (21, 22) обеспечения большой подъемной силы, определенные запасами (5'') по скорости.
20. Устройство по п.15, отличающееся тем, что скорости переключения или скорости (16, 17, 17') изменения конфигурации, которые взаимосвязаны с соответствующими конфигурациями элементов (21, 22) обеспечения большой подъемной силы, рассчитываются посредством специфических для рабочего режима весовых коэффициентов и в соответствии с весовыми коэффициентами, дифференцированными в соответствии с направлениями изменения конфигураций, с учетом запасов по скорости или дифференциальных скоростей (3, 5, 5', 5''), относящихся к рабочим пределам управления, которые имеются в соответствии с условиями в данный момент времени и/или должны быть ожидаемы в связи с другими конфигурациями обеспечения большой подъемной силы, или тем, что скорости (16, 17, 17') изменения конфигурации, взаимосвязанные с соответствующими конфигурациями элементов (21, 22) обеспечения большой подъемной силы, определены посредством конкретных дифференциальных скоростей, относящихся к рабочим пределам, которые должны быть ожидаемы в связи с отдельными конфигурациями при данных о состоянии полета в данный момент времени и других данных, существенных для управления полетом, с учетом запасов по скорости или дифференциальных скоростей (3, 5, 5', 5'').
21. Устройство по п.20, отличающееся тем, что весовые коэффициенты, относящиеся к рабочим пределам дифференциальные скорости или скорости (16, 17, 17') изменения конфигурации, взаимосвязанные с соответствующими конфигурациями элементов (21, 22) обеспечения большой подъемной силы, соответствующие рабочие режимы и зависящие от различного веса самолета направления изменения конфигурации для рабочего режима (16) взлета определены в соответствии с оптимальными характеристиками набора высоты, и/или весовые коэффициенты, относящиеся к рабочим пределам дифференциальные скорости или скорости (16, 17, 17') изменения конфигурации, взаимосвязанные с соответствующими конфигурациями элементов (21, 22) обеспечения большой подъемной силы, соответствующие рабочие режимы и зависящие от различного веса самолета направления изменения конфигурации для режима (17) захода на посадку определяются в соответствии с минимальным расходом топлива во время захода на посадку.
| US 20060049308 A1, 09.03.2006 | |||
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| US 4106730 A, 15.08.1978 | |||
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2151714C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАКРЫЛКАМИ САМОЛЕТА | 1992 |
|
RU2065377C1 |
| Устройство для измерения бандажа колеса | 1989 |
|
SU1684144A1 |
| US 4042197 A1, 16.08.1977. | |||

