Настоящее изобретение относится к области пилотирования летательного аппарата, такого как самолет или винтокрылый летательный аппарат, при помощи по меньшей мере двух органов управления полетом.
Таким образом, в дальнейшем тексте настоящей заявки под органом управления следует понимать любое устройство управления, которым может манипулировать пилот или которое может управляться автоматически как из кабины экипажа, так и снаружи летательного аппарата, если он летит без пилота. Такие органы управления могут быть выполнены в разных формах, в частности, с одной стороны, в виде рычага, рукоятки или «мини-рукоятки», называемой также на английском языке ʺjoystickʺ, и, с другой стороны, в виде педали ножного управления.
Эти органы управления позволяют перемещать аэродинамические средства относительно воздушного потока, встречаемого фюзеляжем летательного аппарата. В случае самолета такие аэродинамические средства могут представлять собой либо закрылки, элероны или интерцепторы крыла, либо руль направления киля или руль высоты.
В случае винтокрылого летательного аппарата такие аэродинамические средства могут соответствовать общему или циклическому шагу лопастей главного несущего винта или общему шагу лопастей заднего винта.
В частности, изобретение относится к способу управления аэродинамическими средствами летательного аппарата, к соответствующей системе управления и к летательному аппарату, снабженному этой системой управления.
Как правило, летательные аппараты, пилотируемые двумя пилотами, содержат обычные органы управления полетом, механически связанные между собой и позволяющие индивидуально или одновременно перемещать механическую связь, обеспечивающую изменение положения аэродинамических средств относительно падающего воздушного потока.
Кроме того, существуют также электрические органы управления полетом, приводимые в действие вручную пилотами и позволяющие также генерировать команду управления в виде электрического сигнала, характеризующего положение каждого из органов управления.
Кроме того, с появлением электрических органов управления полетом отпала необходимость в механической связи между двумя органами управления, позволяющей каждому из пилотов управлять вручную летательным аппаратом одновременно или альтернативно. В частности, эта механическая связь становится бесполезной при мини-рукоятках, позволяющих при помощи очень слабого перемещения органа управления управлять летательным аппаратом, в частности, по тангажу или крену. Это исключение механической связи позволяет улучшить эргономию кабины экипажа такого типа летательного аппарата с двумя пилотами.
Как описано, в частности, в документе WO 2014/199212, известно использование электрических органов управления полетом, не связанных между собой механически. Однако в этом случае двойной режим работы, в котором каждый орган управления может управлять аэродинамическими средствами, по умолчанию включает в себя логику алгебраического сложения команд управления, генерируемых одновременно обоими органами управления.
Таким образом, результирующая уставка управления может быть приведена к нулю, если два органа управления перемещают в противоположных направлениях. Такая нулевая уставка управления не приводит к изменению траектории полета летательного аппарата и может оказаться опасной для пилотирования некоторых летательных аппаратов, требующих более быстрого управления. Действительно, например, в случае винтокрылых летательных аппаратов по умолчанию необходимо, чтобы один из пилотов мог быстро реагировать, чтобы скорректировать траекторию. Таким образом, этот пилот должен полностью обладать правом управления, позволяющим перемещать аэродинамические средства на полную амплитуду перемещения.
Кроме того, в документе WO 2014/199212 описан вариант работы, в котором один из органов управления может быть приоритетным по отношению к второму органу управления. В этом случае только кнопка приоритета может сделать приоритетной одну из двух уставок управления, поступающую от одного из органов управления.
Однако в этом случае сохраняется логика алгебраического сложения уставок управления. Следовательно, орган управления, обладающий приоритетом над вторым органом, не имеет полного влияния на аэродинамические средства летательного аппарата. Иначе говоря, даже если такая кнопка приоритет позволяет исключить из работы один из двух органов управления, она не позволяет приоритетному органу управления управлять аэродинамическими средствами летательного аппарата с полной амплитудой перемещения.
Кроме того, в документах ЕР 2 857 312 и US 5 404 305 описан общий принцип системы управления, обеспечивающей пилотирование летательным аппаратом двумя пилотами, каждый из которых манипулирует соответственно одним органом управления.
Однако эти два документа относятся только к так называемому «командному» режиму, соответствующему логике сложения уставок управления, исходящих от двух органов управления, как описано в документе WO 2014/199212.
Наконец, известны также системы управления, описанные в документах US 2012/053735 и ЕР 2 518 578, в которых только один пилот летательного аппарата может взять на себя управление аэродинамическими средствами, когда включен автопилот. В этом случае аэродинамические средства летательного аппарата могут управляться либо автопилотом, либо двумя органами управления, манипулируемыми двумя пилотами, с логикой сложения, как описано в документе WO 2014/199212.
Однако в этом случае описанные способы и системы не относятся к исключительному контролю систем управления летательного аппарата при помощи двух органов управления, каждый из которых приводится в движение физическим лицом, таким как пилот летательного аппарата.
Настоящее изобретение призвано предложить способ управления, систему управления и летательный аппарат, позволяющие устранить вышеупомянутые ограничения. Таким образом, изобретение должно по умолчанию гарантировать во время двойного режима работы предоставление одному из пилотов исключительного права управления летательным аппаратом, чтобы он мог вручную управлять траекторией летательного аппарата и, следовательно, обладал полным правом управления в случае необходимости экстренной коррекции траектории.
В связи с этим, объектом изобретения является способ управления аэродинамическими средствами летательного аппарата с механически разъединенными между собой системами управления полетом, позволяющий осуществлять пилотирование летательного аппарата по меньшей мере двумя пилотами. Таким образом, такой летательный аппарат содержит по меньшей мере два органа управления, каждый из которых предназначен для приведения в движение соответственно одним из упомянутых по меньшей мере двух пилотов и каждый из которых позволяет генерировать команды управления для осуществления перемещения аэродинамических средств относительно падающего воздушного потока.
Кроме того, такой способ содержит логику пилотирования, называемую операционной логикой, причем эта операционная логика включает в себя двойной режим работы, в котором каждый орган управления может управлять аэродинамическими средствами.
Этот способ отличается, с одной стороны, тем, что в двойном режиме работы только один из упомянутых по меньшей мере двух органов управления, называемый активированным органом, управляет исключительно, причем с полной амплитудой перемещения, аэродинамическими средствами, при этом другой орган управления, называемый деактивированным органом, временно является не действующим на аэродинамические средства, и, с другой стороны, тем, что в двойном режиме работы можно генерировать ручную активацию деактивированного органа, что автоматически приводит к деактивации активированного органа, при этом первоначально деактивированный орган опять становится активированным для управления аэродинамическими средствами с полной амплитудой их перемещения.
Иначе говоря, согласно первому варианту осуществления, при таком способе управления в двойном режиме работы два пилота не могут пилотировать летательный аппарат одновременно. С другой стороны, каждый пилот может альтернативно или исключительно управлять аэродинамическими средствами с полным правом, соответствующим полной амплитуде перемещения каждого аэродинамического средства.
Понятие «альтернативно» означает, что первый пилот может взять на себя управление, активировав орган управления, который становится активированным органом, при этом орган управления второго пилота одновременно становится деактивированным органом. Таким образом, если не принимать во внимание особые решения, которые будут описаны ниже, второй пилот может, в свою очередь, взять на себя управление, и его орган управления становится активированным органом, и в этом случае орган управления первого пилота становится деактивированным органом.
Следовательно, такая исключительность полного права управления двух органов управления отличается от права управления органами управления со сложением, обычно используемого в способах управления летательным аппаратом, пилотирование которым осуществляют с двумя механически разъединенными органами управления.
Кроме того, необходимо отметить, что упомянутые по меньшей мере два органа управления, каждый из которых предназначен для манипулирования соответственно одним из упомянутых по меньшей мере двух пилотов, по сути исключают устройство типа автопилота летательного аппарата. Действительно, такие устройства типа автопилота не являются органами управления, предназначенными для ручного манипулирования физическим лицом, таким как пилот летательного аппарата.
Кроме того, чтобы узнать, какой пилот располагает активированным органом управления, способ управления может включать в себя генерирование сенсорных информационных сигналов, предназначенных для воспроизведения визуальной и/или звуковой информации. Такие сенсорные сигналы могут представлять собой визуальные указания на экране, специальные оптические индикаторы, звуковые тревожные сигналы или внятные голосовые сообщения, указывающие пилотам, какой из органов управления является активированным.
Кроме того, как было указано выше, предпочтительно, как только один из пилотов активирует свой орган управления, который первоначально был деактивирован, это приводит к автоматический деактивации другого органа управления, который первоначально был активирован. Кроме того, такую ручную активацию деактивированного органа можно осуществлять по-разному в зависимости от различных описанных ниже примеров осуществления.
Так, согласно первому варианту осуществления, ручную активацию деактивированного органа может производить пилот, отвечающий за деактивированный орган, путем нажатия на кнопку активации.
Разумеется, такая кнопка активации может находиться непосредственно на первоначально деактивированном органе управления. Нажатие на эту кнопку активации может производить легко пилот при помощи своего большого или указательного пальца.
Согласно второму примеру осуществления, ручную активацию деактивированного органа может производить пилот, отвечающий за деактивированный орган, путем перемещения этого деактивированного органа.
В этом случае ручная активация может происходить автоматически и напрямую при перемещении первоначально деактивированного органа относительно его опоры или в целом относительно корпуса летательного аппарата.
Согласно третьему варианту осуществления, ручную активацию деактивированного органа может производить пилот, отвечающий за деактивированный орган, двумя разными способами. При этом ручную активацию деактивированного органа можно осуществлять либо путем нажатия на кнопку активации в соответствии с первым примером осуществления, либо путем перемещения этого деактивированного органа в соответствии с вторым примером осуществления.
Таким образом, пилот, отвечающий за деактивированный орган, может выбрать средство, позволяющее ему вручную активировать его деактивированный орган.
На практике, деактивированный орган может удерживаться в положении силой удержания. Такая сила удержания деактивированного органа производит при этом сенсорный сигнал, незамедлительно воспринимаемый пилотом, который может идентифицировать этот орган как находящийся в деактивированном состоянии.
Предпочтительно деактивированный орган может удерживаться в центральном положении, называемом нейтральным положением, соответствующем середине общего хода движения, когда он активирован, деактивированного органа.
Иначе говоря, когда орган управления деактивируют, его можно перевести в нейтральное положение, после чего удерживать в этом положении. Для перемещения органа управления в нейтральное положение можно предусмотреть несколько решений.
Согласно первому решению пилот может воздействовать ручным усилием на орган управления в направлении нейтрального положения. В этом случае орган управления может быть органом пассивного типа без автоматического приведения в положение.
Согласно второму решению орган управления может автоматически возвращаться в нейтральное положение при помощи упругих возвратных средств в случае органа управления пассивного типа или при помощи механизированных средств в случае органа управления активного типа с автоматическим приведением в положение от механизированных средств.
Кроме того, такая сила удержания деактивированного органа может преодолеваться вручную или не преодолеваться пилотом. Поэтому существуют два отличных друг от друга варианта осуществления.
Так, согласно первому варианту сила удержания может превышать пороговое значение и позволяет препятствовать любому ручному приведению в действие деактивированного органа пилотом летательного аппарата.
Таким образом, удержание в положении деактивированного органа является постоянным, и пилот не может вручную привести в действие деактивированный орган, не активировав предварительно, например, средство ручной активации, выполненное в виде кнопки активации.
Согласно второму варианту сила удержания может быть меньше порогового значения и может быть преодолена посредством ручного приведения в действие деактивированного органа пилотом летательного аппарата.
Таким образом, удержание в положении деактивированного органа является временным. В этом случае пилот может вручную привести в действие деактивированный орган напрямую без его предварительной активации.
В этом случае преодоление силы удержания деактивированного органа может привести к ручной активации деактивированного органа.
Кроме того, такая ручная активация деактивированного органа происходит автоматически и интуитивно в момент преодоления силы блокировки пилотом, который намеревается взять на себя управление летательным аппаратом.
Предпочтительно при каждой новой ручной активации вновь активируемого, но первоначально деактивированного органа можно генерировать запрет повторной активации по меньшей мере в течение заранее определенного времени для вновь деактивируемого, но первоначально активированного органа.
Иначе говоря, такой запрет позволяет автоматически и временно заблокировать немедленную повторную активацию вновь деактивируемого органа. Такой запрет повторной активации позволяет сделать более надежным двойной режим работы в рамках способа управления.
На практике запрет повторной активации для вновь деактивируемого, но первоначально активированного органа может выбирать один из пилотов летательного аппарата при помощи первого элемента выбора, приводимого в действие только этим пилотом.
В этом случае пилот, отвечающий за приведение в действие первого элемента выбора, может выбрать запрет немедленной повторной активации органа, который только что был деактивирован. Таким образом, когда выбирают запрет повторной активации, пилот, отвечающий за первоначально активированный и вновь деактивируемый орган, обязан выждать заранее определенное время, прежде чем он сможет повторно активировать свой орган управления. На практике, это заранее определенное время может составлять от одной до трех секунд, если это время истекает автоматически, или может представлять собой время, завершение которого определяет пилот, который произвел запрет немедленной повторной активации.
Кроме того, ручную активацию деактивированного органа и запрет немедленной повторной активации можно осуществлять одновременно при помощи единственного средства.
Иначе говоря, запрет немедленной повторной активации может происходить одновременно с активацией деактивированного органа. Таким образом, единственное средство может представлять собой либо кнопку активации, либо намеренное и ручное отклонение органа управления, который первоначально удерживался в положении, так как был деактивирован.
Кроме того, когда включен запрет на немедленную повторную активацию и если ручную активацию деактивированного органа можно осуществить либо нажатием на кнопку активации, либо путем перемещения этого деактивированного органа, предусмотрено, чтобы немедленную повторную активацию можно было применить только в случае ручной активации деактивированного органа путем его перемещения.
В этом случае только ручная активация вновь деактивируемого органа, осуществляемая путем нажатия на кнопку активации, позволяет отменить запрет немедленной повторной активации этого вновь деактивируемого органа и, следовательно, немедленно повторно активировать этот вновь деактивированный орган.
Предпочтительно операционная логика может включать в себя по меньшей мере один режим работы с одним пилотом, в котором:
- только один из упомянутых по меньшей мере двух органов управления, называемый активированным органом, позволяет управлять исключительно и с полной амплитудой перемещения аэродинамическими средствами, при этом другой орган управления, называемый деактивированным органом, не может воздействовать на аэродинамические средства, и
- активированный орган все время остается активированным, и деактивированный орган все время остается деактивированным.
Таким образом, способ включает в себя также режим работы с одним пилотом, в котором пилот, располагающий деактивированным органом, не может взять на себя управление летательным аппаратом. Только пилот, располагающий активированным органом, может генерировать команды управления аэродинамическими средствами летательного аппарата.
Кроме того, операционная логика способа позволяет также выбирать режим работы, выбираемый пилотом или пилотами перед любым полетом летательного аппарата, и затем этот режим работы может быть изменен в определенных условиях.
На практике, операционная логика включает в себя двойной режим работы и может содержать два режима работы с одним пилотом, соответствующие режиму с одним левым пилотом, в котором активированным органом является орган, расположенный слева в кабине экипажа летательного аппарата, и режиму с одним правым пилотом, в котором активированным органом является орган, расположенный справа в кабине экипажа летательного аппарата. При этом летательный аппарат может содержать переключатель, позволяющий вручную выбирать один или другой из двух режимов работы с одним пилотом. Кроме того, в этом случае ручную активацию деактивированного органа в двойном режиме осуществляют при помощи другого средства, отличного от переключателя, позволяющего выбирать режим работы с одним пилотом операционной логики.
Иначе говоря, операционная логика позволяет только одному из пилотов взять на себя управление летательным аппаратом путем активации левого органа управления или правого органа управления летательного аппарата. Этот выбор активируемого органа управления может осуществлять пилот перед любым полетом летательного аппарата, и, в случае необходимости, в определенных условиях его можно изменить.
Кроме того, такой переключатель, позволяющий выбирать один или другой из двух режимов работы с одним пилотом, ни в коем случае не может осуществить ручную активацию деактивированного органа, связанную с двойным режимом работы, которую осуществляют либо при помощи кнопки активации, либо путем перемещения или прямого отклонения деактивированного органа.
Предпочтительно переключатель может также позволять выбирать двойной режим работы.
Таким образом, при помощи одного переключателя пилот или пилоты могут выбирать, передавать или не передавать право пилотирования различным пилотам летательного аппарата. Такой переключатель может представлять собой трехпозиционный выключатель, в частности, такой как поворотная кнопка, например, с первым положением, соответствующим режиму работы с одним левым пилотом, вторым центральным положением, соответствующим двойному режиму работы, и с третьим положением, соответствующим режиму работы с одним правым пилотом.
Предпочтительно способ управления может содержать другую логику, называемую командной логикой, которая, когда ее активируют при помощи второго элемента выбора, деактивирует операционную логику. В командной логике упомянутые по меньшей мере два органа управления можно активировать одновременно для управления путем сложения полной амплитудой перемещения аэродинамических средств.
В этом случае и согласно второму варианту осуществления, нет исключительности между упомянутыми по меньшей мере двумя органами управления летательным аппаратом, которые активируют одновременно. Таким образом, каждый из органов управления можно использовать одновременно, чтобы подать команду управления в систему управления. При этом система управления генерирует уставку управления аэродинамическими средствами в зависимости от сложения команд управления, характеризующих текущие положения упомянутых по меньшей мере двух органов управления.
Объектом настоящего изобретения является также система управления аэродинамическими средствами летательного аппарата с механически разъединенными системами управления полетом, позволяющая осуществлять пилотирование летательного аппарата по меньшей мере двумя пилотами, при этом такая система управления содержит по меньшей мере два органа управления, каждый из которых предназначен для манипулирования соответственно одним из упомянутых по меньшей мере двух пилотов и каждый из которых позволяет генерировать команду управления. Эти команды управления передаются в блок обработки системы управления для генерирования уставок управления по меньшей мере одним приводом, осуществляющим перемещение аэродинамических средств относительно падающего воздушного потока.
Такая система управления отличается тем, что применяет вышеупомянутый способ управления.
Иначе говоря, такая система управления может содержать по меньшей мере один блок обработки, такой как вычислительное устройство, для генерирования уставки управления аэродинамическими средствами летательного аппарата в зависимости от команд управления, генерируемых упомянутыми по меньшей мере двумя органами управления.
Кроме того, в операционной логике и в двойном режиме работы такой блок управления позволяет также поочередно активировать и деактивировать различные органы управления.
Наконец, объектом изобретения является также летательный аппарат с механически разъединенными системами управления полетом, содержащий систему управления аэродинамическими средствами, позволяющую осуществлять пилотирование летательного аппарата. Кроме того, такая система управления содержит по меньшей мере два органа управления, каждый из которых позволяет генерировать команду управления. Как было указано выше, эти команды управления передаются в блок управления системы управления для генерирования уставок управления по меньшей мере одним приводом, осуществляющим перемещение аэродинамических средств относительно падающего воздушного потока.
Такой летательный аппарат отличается тем, что система управления является описанной выше системой управления.
Таким образом, такой летательный аппарат содержит систему управления аэродинамическими средствами летательного аппарата, при этом система управления содержит по меньшей мере два органа управления, каждый из которых предназначен для манипулирования соответственно одним из упомянутых по меньшей мере двух пилотов, и блок обработки, осуществляющий двойной режим работы, в котором каждый орган управления может управлять аэродинамическими средствами и в котором:
- только один из упомянутых по меньшей мере двух органов управления, называемый активированным органом, управляет исключительно и с полной амплитудой перемещения аэродинамическими средствами, а другой орган управления, называемый деактивированным органом, временно не может действовать на аэродинамические средства, и
- каждый из двух органов управления поочередно активируют для исключительного управления аэродинамическими средствами.
На практике такой летательный аппарат может содержать средства связи, чтобы по меньшей мере получать уставки управления, исходящие из дополнительного органа управления, внешнего по отношению к летательному аппарату. Дополнительный орган управления позволяет дистанционно управлять одним из двух органов управления летательного аппарата.
В этом случае в летательном аппарате управление может осуществлять только один пилот. При этом дополнительный орган управления расположен, например, в наземном пункте управления, и средства связи позволяют осуществлять операционную логику и ее двойной режим с распределением между кабиной экипажа летательного аппарата, в которой управление осуществляет пилот, и наземным пунктом управления.
Изобретение и его преимущества будут более очевидны из нижеследующего описания примеров осуществления, которые имеют иллюстративный, но не ограничительный характер, со ссылками на прилагаемые чертежи, на которых:
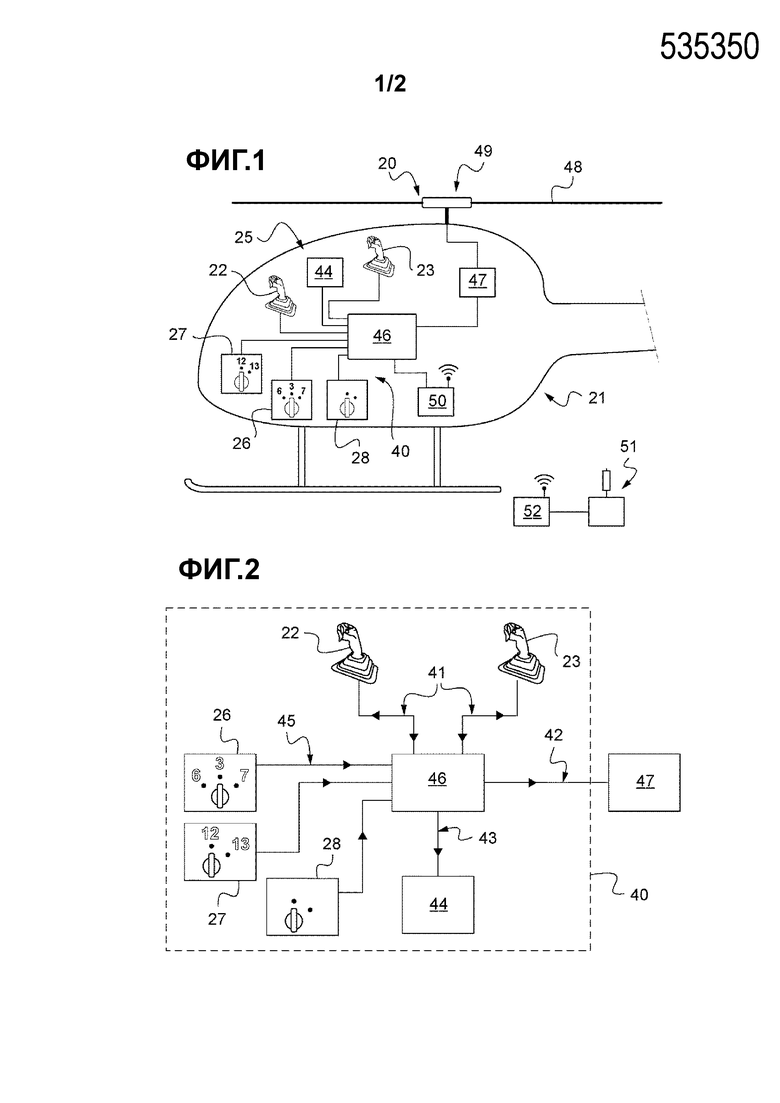
Фиг. 1 - вид сбоку летательного аппарата в соответствии с изобретением, позволяющего применять первый и второй варианты осуществления способа управления.
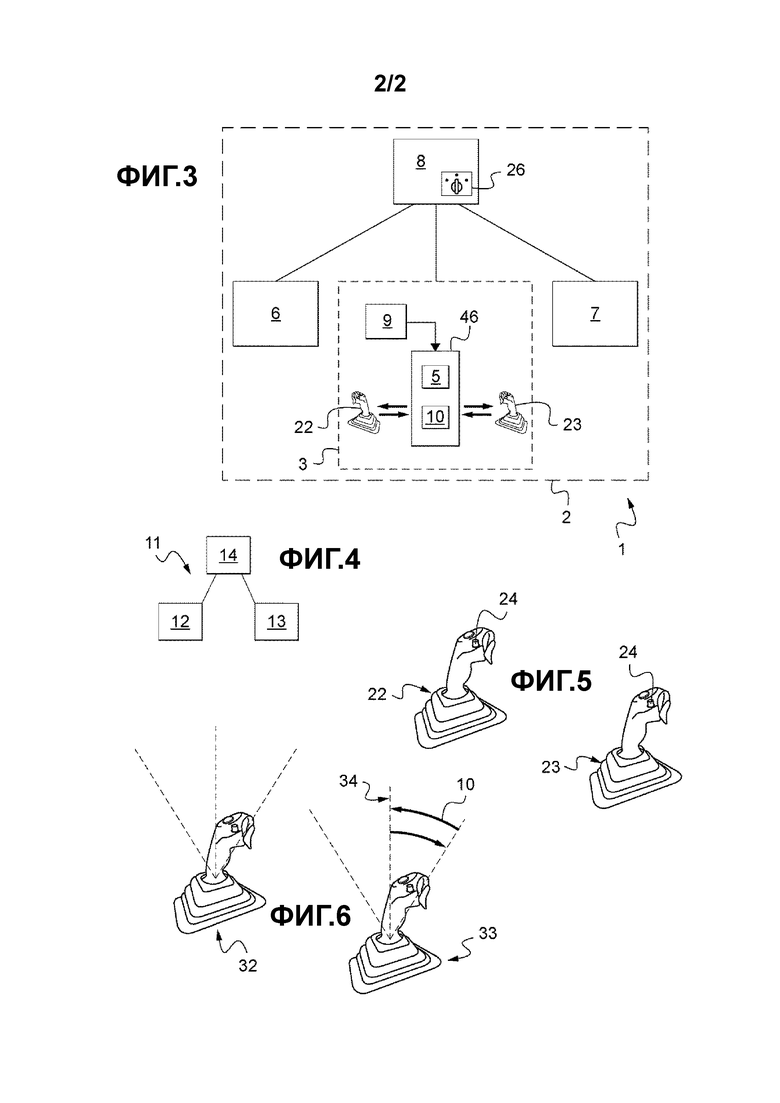
Фиг. 2 - схема системы управления в соответствии с изобретением, тоже позволяющей применять первый и второй варианты осуществления способа управления.
Фиг. 3 - логическая блок-схема первого варианта осуществления способа управления в соответствии с изобретением.
Фиг. 4 - логическая блок-схема второго варианта осуществления способа управления в соответствии с изобретением.
Фиг. 5 - вид в перспективе первого примера органов управления летательного аппарата в соответствии с изобретением.
Фиг. 6 - вид в перспективе второго примера органов управления летательного аппарата в соответствии с изобретением.
Элементы на разных чертежах имеют одинаковые обозначения.
Как было указано выше, изобретение относится к летательному аппарату с электрической системой управления полетом, позволяющей осуществлять пилотирование. Кроме того, такой летательный аппарат позволяет двум пилотам пилотировать его при помощи по меньшей мере двух не связанных механически электрических органов управления.
Показанное на фиг. 1 изобретение относится к летательному аппарату 21, который в данном случае является, например, винтокрылым летательным аппаратом.
Такой летательный аппарат 21 содержит систему 40 управления, включающую в себя блок 46 обработки для генерирования электрических, оптических или цифровых уставок управления и для их передачи по меньшей мере на один привод 47, осуществляющий перемещение аэродинамических средств 20 относительно падающего воздушного потока.
В случае, когда летательный аппарат 21 является винтокрылым летательным аппаратом, привод 47 позволяет изменять общий шаг и/или циклический шаг лопастей 48 главного несущего винта 49 винтокрылого летательного аппарата. Однако изобретение не ограничивается этим вариантом выполнения, представленным в качестве примера, и может относиться к приводу, управляемому ножной педалью для изменения общего шага и/или циклического шага лопастей заднего винта винтокрылого летательного аппарата.
Кроме того, в кабине 25 экипажа летательного аппарата расположены по меньшей мере два органа 22, 23 управления, которые можно активировать исключительно один за другим для пилотирования летательного аппарата 21. Каждый орган 22, 23 управления, когда он активирован, получает полное право управления амплитудой перемещения аэродинамических средств 20.
Кроме того, показанные на фиг. 1 органы 22, 23 управления могут представлять собой, в частности, мини-рукоятки, выполненные, например, с возможностью изменения циклического шага и/или общего шага лопастей 48 главного несущего винта 49 летательного аппарата 21.
В кабине 25 расположен такое переключатель, позволяющий по меньшей мере одному из пилотов летательного аппарата 21 выбирать три режима 3, 6, 7 работы операционной логики 2, 12. Такая операционная логика 2 и ее различные режимы 3, 6, 7 работы, соответствующие первому варианту осуществления способа 1 управления, будут описаны ниже со ссылками на фиг. 3. Точно так же, способ 11 управления в соответствии с вторым вариантом осуществления содержит одновременно операционную логику 12 и командную логику 13 и будет описан ниже со ссылками на фиг. 4.
Кроме того, в кабине 25 летательного аппарата 21 может быть также установлен первый элемент 28 выбора, позволяющий только одному из пилотов летательного аппарата 21 разрешать или запрещать повторную активацию по меньшей мере в течение заранее определенного времени вновь деактивируемого, но первоначально активированного органа 22.
Согласно вышеупомянутому второму варианту выполнения, кабина 25 экипажа летательного аппарата 21 содержит также второй элемент 27 выбора, позволяющий по меньшей мере одному из пилотов выбирать исключительно операционную логику 12 или командную логику 13.
Кабина 25 экипажа летательного аппарата 21 может также быть снабжена визуальными или звуковыми средствами 44 информации, предназначенными для генерирования информации и ее передачи пилотам летательного аппарата 21, чтобы сообщить им об органе 22 или 23 управления, который активирован исключительно.
Кроме того, такой летательный аппарат 21 может содержать средства 50 связи, позволяющие, в частности, получать уставки управления от дополнительного органа 51 управления, внешнего по отношению к упомянутому летательному аппарату 21.
Таким образом, этот дополнительный орган 51 управления связан с органом 52 передачи для передачи из пункта управления, удаленного от летательного аппарата 21, команд пилотирования в систему 40 управления летательного аппарата 21. Следовательно, дополнительный орган 51 управления позволяет дистанционно управлять одним из двух органов 22, 23 управления летательного аппарата 21.
Так, дополнительный орган 51 управления может участвовать в осуществлении операционной логики 2, 12 и, в частности, в двойном режиме 3 работы для пилотирования летательного аппарата 21, когда в кабине 25 летательного аппарата 21 присутствует только один пилот.
Как показано на фиг. 2, изобретение относится также к системе 40 управления аэродинамическими средствами 20 летательного аппарата 21. Такая система 40 управления содержит по меньшей мере два органа 22, 23 управления, каждый из которых электрически генерирует команды 41 управления и передает их в блок 46 обработки.
Такая система 40 управления генерирует уставки 42 управления по меньшей мере одним приводом 47 для обеспечения пилотирования летательного аппарата 21 путем перемещения аэродинамических средств 20.
Кроме того, такая система 40 управления содержит переключатель 26, позволяющий по меньшей мере одному из пилотов летательного аппарата 21 выбирать по меньшей мере один из режимов 3, 6 или 7 работы операционной логики 2, 12, которая будет описана ниже. Центральное положение переключателя 26 соответствует двойному режиму 3 работы, левое положение переключателя 26 соответствует режиму 6 работы с одним левым пилотом, и правое положение переключателя 26 соответствует режиму 7 работы с одним правым пилотом. Таким образом, переключатель 26 подает команды 45 в блок 46 обработки, причем эти команды 45 характеризуют режим работы, выбранный по меньшей мере одним из пилотов.
Кроме того, такая система 40 управления может также содержать средства 44 информации, генерирующие сенсорные сигналы информации, воспроизводящие визуальную и/или звуковую информацию. Такие сенсорные сигналы могут представлять собой визуальные указания на экране, специальные оптические индикаторы, звуковые тревожные сигналы или внятные голосовые сообщения, указывающие пилотам, какой орган управления активирован.
Для этого блок 46 обработки тоже генерирует сенсорные команды 43, предназначенные для средств 44 информации и позволяющие пилотам визуально или на слух идентифицировать, какой орган 22 или 23 активирован.
Показанное на фиг. 3 и 4 изобретение относится также к способу 1, 11 управления, который может применять различные логики и различные режимы работы.
Как показано на фиг. 3 и согласно первому варианту осуществления, способ 1 управления содержит операционную логику 2, включающую в себя, в частности, двойной режим 3 работы, в котором каждый орган 22, 23 управления может управлять аэродинамическими средствами 20 летательного аппарата 21. Такая операционная логика 2 может включать в себя также два режима 6, 7 работы с одним пилотом, в которых только один из органов 22 или 23 управления может управлять аэродинамическими средствами 20 летательного аппарата 21 с полной амплитудой перемещения.
При этом режимы 6, 7 работы с одним пилотом могут включать в себя режим 6 работы с одним левым пилотом, в котором левый орган 22 управления обладает полным правом управления аэродинамическими средствами 20, и, аналогично, режим 7 работы с одним правым пилотом, в котором правый орган 23 управления обладает полным правом управления аэродинамическими средствами 20.
Как оказано на фиг. 3, способ 1 управления содержит также этап 8 выбора, позволяющий по меньшей мере одному пилоту выбрать вручную двойной режим 3 работы или режимы 6, 7 работы с одним пилотом при помощи переключателя 26.
После выбора двойного режима 3 работы только один из двух органов управления, называемый активированным органом 22, управляет исключительно, причем с полным правом, аэродинамическими средствами 20, при этом другой орган управления, называемый деактивированным органом 23, временно не может воздействовать на аэродинамические средства 20.
Кроме того, в этом двойном режиме 3 работы при обнаружении ручной активации 9 деактивированного органа 23 ее передают в блок 46 обработки, и способ 1 управления может автоматически произвести деактивацию активированного органа 22, при этом первоначально деактивированный орган 23 опять активируют для управления через привод 47 аэродинамическими средствами 20 с полной амплитудой перемещения.
Кроме того, в двойном режиме 3 работы блок 46 обработки может генерировать запрет повторной активации 5 по меньшей мере в течение заранее определенного времени для вновь деактивируемого, но первоначально активированного органа 22.
Такой запрет повторной активации 5 позволяет временно заблокировать моментальную повторную активацию вновь деактивированного органа управления.
Как показано на фиг. 4 и согласно второму варианту осуществления, способ 11 управления может содержать, кроме операционной логики 12, эквивалентной логике, описанной со ссылками на фиг. 3, дополнительную и активируемую в исключительном порядке командную логику 13. Таким образом, при активации командной логики 13 она блокирует операционную логику 12.
В отличие от операционной логики 12 такая командная логика 13 позволяет активировать одновременно оба органа управления и генерировать уставку управления аэродинамическими средствами 20, которая зависит от сложения команд 41 управления, поступающих от каждого органа 22, 23 управления.
Кроме того, способ 11 управления содержит также этап 14 выбора, отличный от этапа 8 выбора, описанного со ссылками на фиг.3, для выбора режима работы операционной логики 2. Такой этап 13 выбора состоит при этом в исключительном выборе операционной логики 12 или командной логики 13.
Как показано на фиг. 5, согласно первому примеру выполнения, летательный аппарат 21, в котором применяют заявленный способ 1, 11, содержит активированный орган 22, позволяющий исключительно управлять аэродинамическими средствами 20 летательного аппарата 21, и деактивированный орган 23, не действующий на аэродинамические средства. Как показано на фигуре, органы 22, 23 управления выполнены в виде мини-рукоятки и, согласно первому примеру выполнения, могут содержать кнопку 24 активации, позволяющую каждому из пилотов летательного аппарата 21 генерировать ручную активацию 9, как показано на фиг. 3.
Согласно второму варианту выполнения, показанному на фиг. 6, деактивированный орган 33 может напрямую генерировать описанную выше ручную активацию только при отклонении или перемещении подвижного элемента относительно неподвижной опоры, неподвижно соединенной с корпусом летательного аппарата.
Кроме того, деактивированный орган 33 может удерживаться в положении силой 10 удержания в нейтральном положении 34.
Таким образом, двойной режим 3 работы может генерировать силу 10 удержания для удержания в положении деактивированного органа 33. Такая сила 10 удержания позволяет пилоту получать прямую сенсорную информацию, указывающую ему, что его орган управления деактивирован.
Кроме того, чтобы иметь возможность генерировать ручную активацию 9 деактивированного органа 33, пилот может привести вручную в действие деактивированный орган 33, находящийся в нейтральном положении.
Согласно первому варианту, такая сила 10 удержания может превышать пороговое значение, препятствуя пилоту вручную активировать деактивированный орган 33. Кроме того, согласно второму варианту, сила 10 удержания может быть меньше порогового значения, позволяя пилоту ее преодолеть и привести в действие деактивированный орган 33.
Кроме того, когда орган управления деактивируют, то, согласно первому решению, соответствующему, например, пассивному органу управления, его может перевести вручную пилот или автоматически упругие возвратные средства в нейтральное положение 34. Кроме того, согласно второму решению, соответствующему, например, активному органу управления, вновь деактивированный орган управления может автоматически вернуться в нейтральное положение 34 при помощи механизированных средств.
Естественно, в настоящее изобретение можно вносить различные изменения с точки зрения его осуществления. Хотя описаны были несколько вариантов осуществления, понятно, что все возможные варианты невозможно идентифицировать избыточно. Естественно, можно предусмотреть замену описанного средства на эквивалентное средство, не выходя за рамки настоящего изобретения.
Кроме того, можно предусмотреть экипаж, состоящий из одного пилота в летательном аппарате и одного пилота на земле, и связь между наземным пунктом управления и летательным аппаратом. В этом случае неиспользуемый пост управления летательного аппарата можно конфигурировать для дистанционного управления. Таким образом, из двух пилотов, управляющих летательным аппаратом, один находится на борту летательного аппарата, а другой - на земле и располагает органом дистанционного управления. При этом можно применять те же функциональные возможности операционной логики, в частности, в двойном режиме работы.
Из всего вышеизложенного следует, что заявленный способ управления аэродинамическими средствами летательного аппарата, соответствующая система управления и летательный аппарат, снабженный такой системой управления, имеют много преимуществ и, в частности, позволяют:
- сохранять в двойном режиме работы исключительное пилотирование, аналогичное пилотированию в режиме работы с одним пилотом,
- облегчить координацию между пилотами и распределить задачи пилотирования,
- обеспечивать немедленное взятие на себя управления в экстренном случае за счет преодоления силы блокировки органа управления,
- контролировать конфликтные ситуации одновременного использования органов управления путем временного запрета повторной активации вновь деактивированного органа управления, и
- использовать дополнительную командную логику, которая в этом случае блокирует операционную логику.
Группа изобретений относится к способу и системе управления для управления аэродинамическими средствами летательного аппарата и летательному аппарату, содержащему такую систему. Для управления аэродинамическими средствами летательного аппарата с механически разъединенными между собой системами управления, каждая из которых содержит свой орган управления, управление осуществляют одним из органов, называемым активированным органом управления, другие органы управления при этом деактивируют согласно определенной логике пилотирования, при этом возможна ручная активация деактивированного органа управления с автоматической деактивацией второго активированного органа управления. Система управления содержит не менее двух органов управления двумя пилотами, блок управления, блок обработки системы управления, привод для перемещения аэродинамических средств относительно падающего воздушного потока. Обеспечивается безопасность полета за счет предоставления исключительного права управления одному из пилотов в случае необходимости экстренной коррекции траектории. 3 н. и 14 з.п. ф-лы, 6 ил.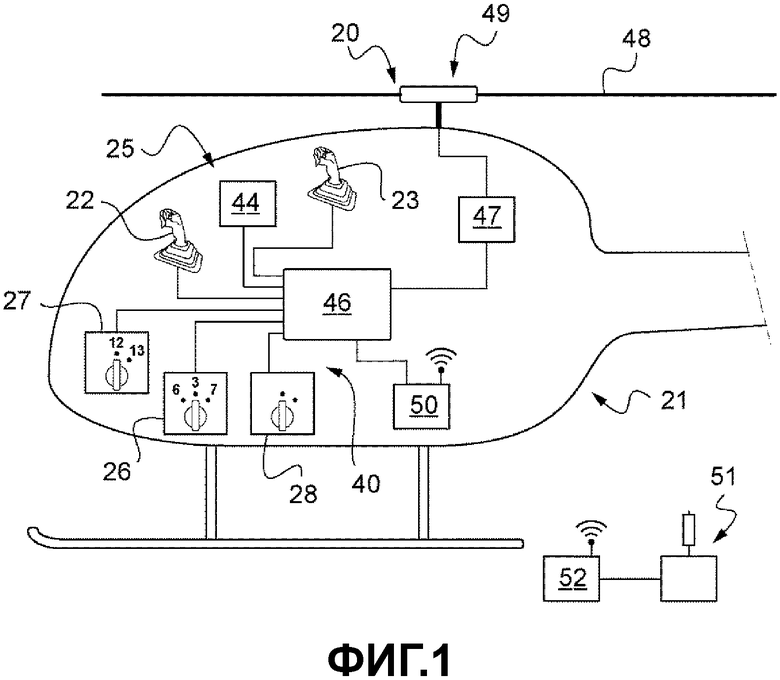
1. Способ (1,11) управления для управления аэродинамическими средствами (20) летательного аппарата (21) с механически разъединенными между собой системами управления полетом, позволяющий осуществлять пилотирование упомянутого летательного аппарата (21) по меньшей мере двумя пилотами, при этом упомянутый летательный аппарат (21) содержит по меньшей мере два органа (22,32-23,33) управления, каждый из которых предназначен для приведения в движение соответственно одним из упомянутых по меньшей мере двух пилотов и каждый из которых позволяет генерировать команды (41) управления для осуществления перемещения упомянутых аэродинамических средств (20) относительно падающего воздушного потока, при этом упомянутый способ (1, 11) управления содержит логику пилотирования, называемую операционной логикой (2,12), при этом упомянутая операционная логика (2,12) включает в себя двойной режим (3) работы, в котором каждый орган (22,32-23,33) управления может управлять упомянутыми аэродинамическими средствами (20),
отличающийся тем, что в упомянутом двойном режиме (3) работы только один из упомянутых по меньшей мере двух органов управления, называемый активированным органом (22,32), управляет исключительно, причем с полной амплитудой перемещения, упомянутыми аэродинамическими средствами (20), при этом другой орган управления, называемый деактивированным органом (23,33), является временно не действующим на упомянутые аэродинамические средства (20), и
тем, что в упомянутом двойном режиме (3) работы можно генерировать ручную активацию (9) упомянутого деактивированного органа (23,33), что автоматически приводит к деактивации упомянутого активированного органа (22,32), при этом первоначально деактивированный орган (23,33) опять становится активированным для управления упомянутыми аэродинамическими средствами (20) с упомянутой полной амплитудой перемещения.
2. Способ по п. 1, отличающийся тем, что упомянутую ручную активацию (9) упомянутого деактивированного органа (23) производит пилот, отвечающий за деактивированный орган (23), путем нажатия на кнопку (24) активации.
3. Способ по п. 1, отличающийся тем, что упомянутую ручную активацию (9) упомянутого деактивированного органа (33) производит пилот, отвечающий за деактивированный орган (33), путем перемещения упомянутого деактивированного органа (33).
4. Способ по п. 1, отличающийся тем, что упомянутый деактивированный орган (23,33) удерживается в положении силой (10) удержания.
5. Способ по п. 4, отличающийся тем, что упомянутый деактивированный орган (23,33) удерживается в центральном положении (34), называемом нейтральным положением, соответствующем середине общего хода движения, когда он активирован, упомянутого деактивированного органа (23,33.
6. Способ по п. 4, отличающийся тем, что упомянутая сила (10) удержания превышает пороговое значение и позволяет препятствовать любому ручному приведению в действие упомянутого деактивированного органа (23) пилотом упомянутого летательного аппарата (21).
7. Способ по п. 4, отличающийся тем, что упомянутая сила (10) удержания меньше порогового значения и может быть преодолена посредством ручного приведения в действие упомянутого деактивированного органа (33) пилотом упомянутого летательного аппарата (21).
8. Способ по п. 7, отличающийся тем, что преодоление упомянутой силы удержания упомянутого деактивированного органа (33) приводит к упомянутой ручной активации (9) упомянутого деактивированного органа (33) путем перемещения упомянутого деактивированного органа (33).
9. Способ по п. 1, отличающийся тем, что при каждой новой ручной активации (9) вновь активируемого, но первоначально деактивированного органа (23,33) генерируют запрет повторной активации (5) по меньшей мере в течение заранее определенного времени для вновь деактивируемого, но первоначально активированного органа (22,32).
10. Способ по п. 9, отличающийся тем, что упомянутый запрет повторной активации (5) по меньшей мере в течение заранее определенного времени для вновь деактивируемого, но первоначально активированного органа (22,32) выбирает один из пилотов упомянутого летательного аппарата (21) при помощи первого элемента (28) выбора, приводимого в действие только упомянутым пилотом.
11. Способ по п. 1, отличающийся тем, что упомянутая операционная логика (2) включает в себя по меньшей мере один режим (6,7) работы с одним пилотом, в котором:
- только один из упомянутых по меньшей мере двух органов управления, называемый активированным органом (22,32), позволяет управлять исключительно и с полной амплитудой перемещения упомянутыми аэродинамическими средствами (20), при этом другой орган управления, называемый деактивированным органом (23,33), является не действующим на упомянутые аэродинамические средства (20), и
- активированный орган (22,32) все время остается активированным, а деактивированный орган (23,33) все время остается деактивированным.
12. Способ по п. 11, отличающийся тем, что упомянутая операционная логика (2) включает в себя два режима (6,7) работы с одним пилотом, соответствующие режиму (6) с одним левым пилотом, в котором активированным органом (22,32) является орган, расположенный слева в кабине (25) экипажа упомянутого летательного аппарата (21), и режиму (7) с одним правым пилотом, в котором активированным органом (23,33) является орган, расположенный справа в кабине (25) экипажа упомянутого летательного аппарата (21), и тем, что упомянутый летательный аппарат (21) содержит переключатель (26), позволяющий вручную выбирать один или другой из упомянутых двух режимов (6,7) работы с одним пилотом, и тем, что в двойном режиме работы упомянутую ручную активацию (9) упомянутого деактивированного органа (23,33) осуществляют при помощи другого средства, отличного от упомянутого переключателя (26).
13. Способ по п. 12, отличающийся тем, что упомянутый переключатель (26) позволяет выбирать двойной режим (3) работы.
14. Способ по п. 1, отличающийся тем, что упомянутый способ (11) управления содержит другую логику пилотирования, называемую командной логикой (13), которая, когда ее активируют при помощи второго элемента (27) выбора, деактивирует упомянутую операционную логику (12), и тем, что в упомянутой командной логике (13) упомянутые по меньшей мере два органа (22,32-23,33) управления активируют одновременно для управления путем сложения упомянутой полной амплитудой перемещения упомянутых аэродинамических средств (20).
15. Система (40) управления для управления аэродинамическими средствами (20) летательного аппарата (21) с механически разъединенными системами управления полетом, позволяющая осуществлять пилотирование упомянутого летательного аппарата (21) по меньшей мере двумя пилотами, при этом упомянутая система (40) управления содержит по меньшей мере два органа (22,32-23,33) управления, каждый из которых предназначен для приведения в движение соответственно одним из упомянутых по меньшей мере двух пилотов и каждый из которых позволяет генерировать команды (41) управления, при этом упомянутые команды (41) управления передаются в блок (46) обработки системы (40) управления для генерирования уставок (42) управления по меньшей мере одним приводом (47), осуществляющим перемещение упомянутых аэродинамических средств (20) относительно падающего воздушного потока,
отличающаяся тем, что упомянутая система (40) управления осуществляет способ управления по одному из пп. 1-14.
16. Летательный аппарат (21) с механически разъединенными системами управления полетом, содержащий систему (40) управления для управления аэродинамическими средствами (20) и для обеспечения осуществления пилотирования упомянутого летательного аппарата (21) по меньшей мере двумя пилотами, при этом упомянутая система (40) управления содержит по меньшей мере два органа (22,32-23,33) управления, каждый из которых предназначен для приведения в движение одним из упомянутых по меньшей мере двух пилотов и каждый из которых позволяет генерировать команду (41) управления, при этом упомянутые команды (41) управления передаются в блок (46) обработки системы (40) управления для генерирования уставок (42) управления по меньшей мере одним приводом (47), осуществляющим перемещение упомянутых аэродинамических средств (20) относительно падающего воздушного потока,
отличающийся тем, что упомянутая система (40) управления является системой (40) управления по п. 15.
17. Летательный аппарат по п. 16, отличающийся тем, что упомянутый летательный аппарат (21) содержит средства (50) связи, чтобы по меньшей мере получать уставки управления, исходящие из дополнительного органа (51) управления, внешнего по отношению к упомянутому летательному аппарату (21), при этом упомянутый дополнительный орган (51) управления позволяет дистанционно управлять одним из упомянутых по меньшей мере двух органов (22,32-23,33) управления летательного аппарата (21).
| Устройство для регулирования скорости клиноременного вариатора | 1955 |
|
SU114939A1 |
| RU 2011113178 A, 20.10.2012 | |||
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 1991 |
|
RU2015064C1 |
| СПОСОБ МНОГОПРОХОДНОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛИ НА ТОКАРНОМ СТАНКЕ | 2012 |
|
RU2501643C1 |
| WO 2003040844 A2, 15.05.2003 | |||
| US 6459228 B1, 01.10.2002. | |||

