2.Устройство no п. 1, отличающееся тем, что балансиры, распо.южеиные по другую сторону конвейера, также связаны один с другим посредством антииараллельного двух кривошипного механизма.
3.Устройство по пп. 1 и 2, сличающееся тем, что на концух балансиров выполнены продольные ПЛИЦЫ, к которых с возможностью скольжения смоптированы укрепленные на конвейере цапфы.
4.Устройство по лп. 1--3, отличающееся тем, что параллельные двухкривошипные
механизмы, на соедините,пьнь1х тягах которых установлены вилочные захваты, расположены с обеих сторон конвейера и связаны между собой общими осями вращения.
5.Устройство по пп. 1-4, отличающееся тем, что щарниры элементов зацепления коромысел параллельного н антипараллельного двухкривошипных механизмов с кулачковым диском закреплены на одной оси.
6.Устройство по пп. 1-5, отличающееся тем, что профиль кулачково|-о диска выполнен в виде наза на его поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования жидкости в сосудах | 1973 |
|
SU603623A1 |
| Устройство для чистки сосудов для проб или реакций | 1978 |
|
SU1013399A1 |
| Продольный конвейер | 1990 |
|
SU1766791A1 |
| ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 1970 |
|
SU286667A1 |
| Машина для набора комплектов печатной продукции | 1988 |
|
SU1676980A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Подвесной грузонесущий конвейер | 1976 |
|
SU619399A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1966 |
|
SU178737A1 |
| ПЕРЕМЕШИВАЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2535698C1 |
| Ленточный конвейер | 1989 |
|
SU1759755A1 |
1. УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ СОСУДОВ С ЖИДКОСТЯМИ, в частности сосудов, содержащих пробы, или сосудов автоматического анализатора, в виде имеющего возможность вертикальных пере.мещений щагового конвейера с ленточным или скребковым тяговым и грузонесущим органом, отличающееся тем, что конвейер установлен в вертикальной направляющей, тяговый и грузонесущий орган опирается на расположенные с обеих сторон конвейера балансиры, причем противолежащие балансиры попарно жестко связаны между собой, а балансиры, расположенные /J7 AyxV/xx/xxxfexx x.-Xxxy/ixxx xjvxxxxxx по одну сторону конвейера, связаны один с другим посредством антипараллельного двухкривоиаипного механизма, коромысло которого снабжено элементом зацепления, связанным с кулачковым диском, имеющим профиль, состоящий из двух рабочих и двух переходных участков, по краям тягового и грузонесущего органа на расстоянии, равном шагу между сосудами, закреплены штифты, выполненные с возможностью взаимодействия с вилочными захватами, установленными на соединительной тяге параллельного двухкривощипного механизма, расположенного сбоку от конвейера, при нижнем положении конвейера, и-с направляющей, установленной неподвижно относительно конвейера, при его верхнем положении, при этом одно из двух коромысел параллельi ного кривошипного механизма также снаб(Л жено элементом зацепления, связанным с кулачковым диском на участке, расположенном со смещением на 90° от участка, с которым связан элемент зацепления коромысла антипараллельного двухкривошипного механизма, в направлении, противоположном направлению вращения кулачкового диска. 4;: ОС со
1
Изобретение относится к устройствам для транспортировки сосудов с жидкостями, которые последовате.льно расположены на тяговых или несущих органах ленточного или скребкового конвейера, в частности для транспортировки исследуемых проб жидкостей в авто.матических анализаторах.
Для автоматизации проведения анализа нескольких проб жидкостей сосуды, содержащие пробы, несколькими рядами располагают на ленточном или скребковом конвейере, которые перемещают сосуды, содержащие пробы, или реакционные сосуды последовательно но заданной временной программе от дозировочного органа к перемещивающему органу, затем к измерительному органу и, в заключении, к очистительному органу. Для выполнения их функций ути органы погружают в сосуды или реакционные сосуды, содержащие жидкости. Для обеспечения выполнения этих функций последовательно во всех сосудах между сосудами и органами должно попеременно производиться относительное движение в горизонтальном и вертикальном направлениях. В известных устройствах эти относительные движения реализуются таким образом; что горизонтальные периодические движения выпо.пняются ленточным или скребковым конвейером, а вертикальные движения - органами (US-PS 3622279).
Известно также устройство для транспортирования сосудов с жидкостями, в частности сосудов, содержащих пробы, или сосудов автоматического анализатора, в виде имеющего .возможность вертикальных перемощенчй шагового конвейера с ленточным li.iii скре(Тков1..1м тяговым и грузонесущим органом ()D-PS 96459).
В протпноноложность к известным устp(.4u-Tfia i оба частичные движения реали зуются приводом. Помимо приводов длм выполнения вертикальных движений органон
не используют также синхронизирующие устройства для вертикальных движений органов, не требуется сложное реверсивное устройство для обеспечения очередности частичных движений, в результате чего не нужны связанные с синхронизирующим и реверсивным устройствами источники неисправностей.
Реализация частичных движений согласно известному устройству производится следующим образом (DD-PS 96459).
Рама ленточного или скребкового конвейера с обеих сторон опирается на поворотные переводные рычаги, которые вместе с рамой образуют параллельный кривощипный механизм. Одно из коромысел прочно связано с качающейся кулисой, кривошип которой насажен на приводную ось.
Кро.ме того, па оси со смещением относительно вышеназвашюго кривошипа расположен второй КрИВОП ИП, ОТ 1ОСЯЩИЙСЯ к
второй качающейся кулисе, которая inapнирно соединена е рамой, имеет храповую собачку и образует вместе с сидяпхим на оси ведущей шестерни тягового и несущего органа колесом с кулачками щаговый механизм.
В результате смещенного расположения кривошипов на приводной оси и целесообразно выбранным размерам кинематических звеньев достигается координированная очередность трех тагов движений: понижение конвейера, перемещение его тягового и несущего о)гана и поднимание конвейера.
Для нормальной работы этого приспособления требуется точное выдерживание производственных допусков довольно многочисленных кинематических частей. Позиционирование сосудов в положениях органов является недостаточно точным, в частности при использовании узких сосудов, содержащих пробы, или реакционных сосудов.
Цель изобретения - упрощение конст. рукции приспособления, снижение затрат на изготовления и повышение Точности позиционирования сосудов в положениях дозировочного, перемеп1Ивак)Н1его, измерите.;1ьного и очистительного органов.
Поставленр1ая цель достигается тем, что в устройстве для транспортировки сосудов с жидкостями, в частности сосудов, спдержащих пробы, или сосудов аг томатического анализатора, в. виде имеющего возможность вертикальных перемещений niaroBoro конвейера с ленточным или скребковым тяговым и грузонесущим органом, конвейер установлен в вертикальной направляющей, тяговый и грузонесущий орган опирается на расположенные с обеих сторон конр ейера балансиры, причем противолежащие балансиры попарно жестко связаны между собой, а балансиры, расположенные по одну сторону конвейера, связаны один с другим посредством антипараллельного двухкриво1нипного механизма, коромысло которого снабжено элементом зацепления, связанным с кулачковым диском, имеющим профиль, состоящий из двух рабочих и двух переходных участков, по краям тягового и грузонесущего органа на расстоянии, равном шагу между сосудами, закреплены штифты, выполненные с возможностью взаимодействй с вилочными захватами, установленными на соединительной, тяге параллельного двухкривошипного механизма, расположенного сбоку от конвейера, при нижнем положении конвейера, и с направляющей, установленной неподвижно относительно конвейера, при его верхнем положении, при этом одно из двух коромысел параллельного кривошипного механизма также снабжено элементом зацепления, связанным с кулачковым диском на участке, расположенным со смещением на 90° от участка, с которым связан элемент зацепления коромысла антипараллельного двухкривощипного механизма, в направлении, противоположном направлению вращения кулачкового диска.
При этом балансиры, расположенные по другую сторону конвейера, также связаны один с другим посредством антипараллельного двухкривошипного механизма; на концах балансиров выполнены продольные шлицы, в которых с возможностью скольжения смонтированы укрепленные на конвейере цапфы.
Причем параллельные двухкривошипные механизмы, на соединительных тягах которых установлены вилочные захваты, расположены с обеих сторсш конвейера и связаны между собой общими осями вращения.
Кроме того, шарниры элементов зацепления коромысел параллельного и антипараллельного двухкривошинных механизмов с кулачковым диском закреплены на одной оси; профиль кулачкового диска выполпен в виде паза на его поверхности.
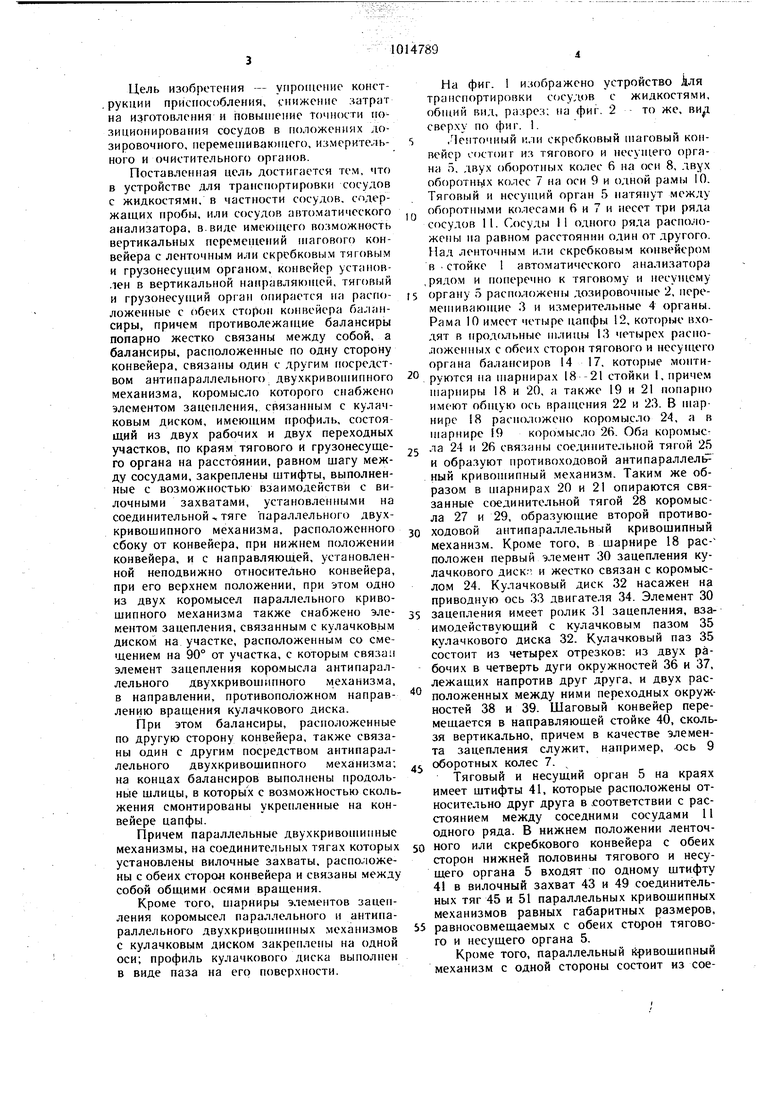
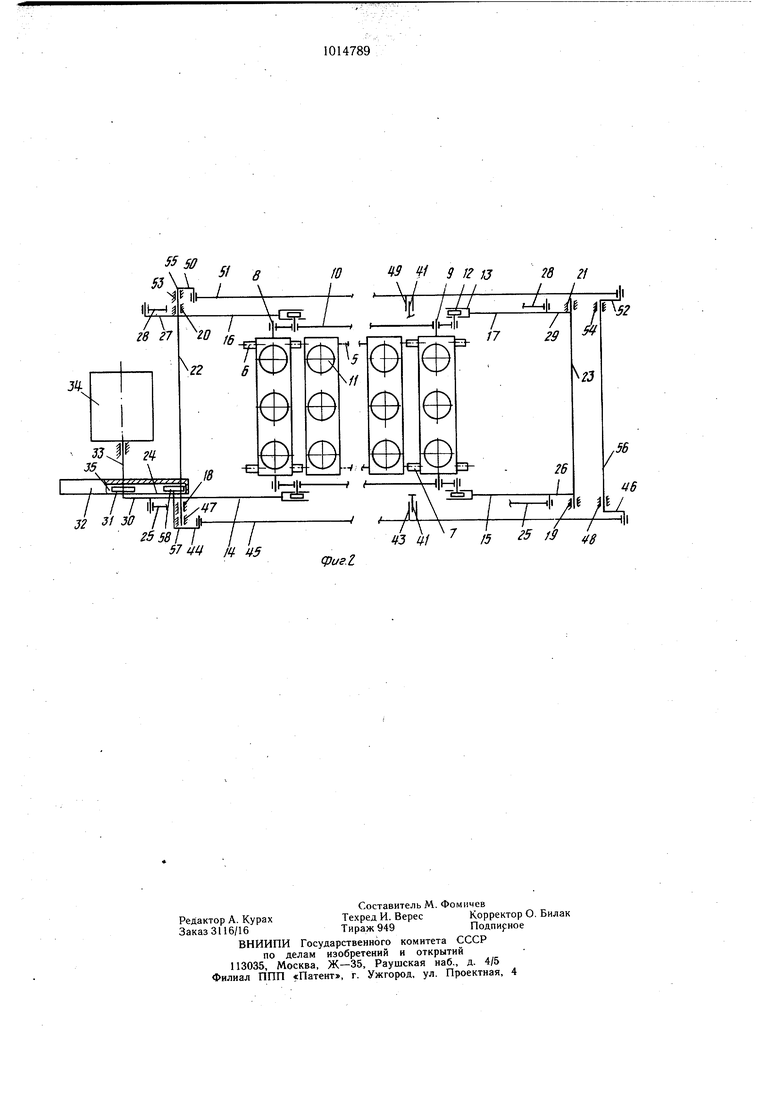
На фиг. 1 изображено устройство Аля транспортировки сосудов с жидкостями, общий вид, разрез; на фиг. 2 - то же, свер.ху по фиг. 1.
S .Чемточиый или скребковый шаговый конвейер состоит из тягового и несущего органа 5, двух оборотных колес 6 на оси 8, двух оборотных колес 7 на оси 9 и одной рамы 10. Тяговый и несущий орган 5 натянут между оборотными колесами 6 и 7 и несет три ряда сосудов 11. Гхкуды II одного ряда расположены на равном расстоянии один от другого. Над ленточным или скребковым конвейером в .стойке 1 автоматического анализатора .рядом и поперечно к тяговому и несуи1ему
5 органу 5 расположены дозировочные 2, перемешивающие 3 и измерительные 4 органы. Рама 10 имеет четыре цапфы 12, которые входят в продольные шлицы 13 четырех расположенных с обеих сторон тягового и necyniero органа балансиров 14 17, которые монтируются на шарнирах 18-21 стойки 1, причем шарниры 18 и 20, а также 19 и 21 попарно имеют общую ось вращения 22 и 23. В шарнире 18 расположено коромысло 24, а в шарнире 19 коромысло 26, Оба коромысла 24 и 26 связаны соединительной тягой 25 и образуют противоходовой антипараллель ный кривошипный механизм. Таким же образом в шарнирах 20 и 21 опираются связанные соединительной тягой 28 коромысла 27 и 29, образуюнхие второй противо0 ходовой антипараллельный кривошипный механизм. Кроме того, в шарнире 18 расположен первый элемент 30 зацепления кулачкового диск. и жестко связан с коромыслом 24. Кулачковый диск 32 насажен на приводную ось 33 двигателя 34. Элемент 30
5 зацепления имеет ролик 31 зацепления, взаимодействующий с кулачковым пазом 35 кулачкового диска 32. Кулачковый паз 35 состоит из четырех отрезков: из двух рабочих в четверть дуги окружностей 36 и 37, лежащих напротив друг друга, и двух рас0положенных между ними переходных окружностей 38 и 39. Шаговый конвейер перемещается в направляющей стойке 40, скользя вертикально, причем в качестве элемента зацепления служит, например, -ось 9
с оборотных колес 7.
Тяговый и несущий орган 5 на краях имеет штифты 41, которые расположены относительно друг друга в оответствии с расстоянием между соседними сосудами 11 одного ряда. В нижнем положении ленточного или скребкового конвейера с обеих сторон нижней половины тягового и несущего органа 5 входят по одному штифту 41 в вилочный захват 43 и 49 соединительных тяг 45 и 51 параллельных кривошипных механизмов равных габаритных размеров,
5 равносовмещаемых с обеих сторон тягового и несущего органа 5.
Кроме того, параллельный ii-ривощипный механизм с одной стороны состоит из соединительной тяги 45 и коромысел 44 и 46, расположенных в шарнирах 47 и 48, а с другой стороны - из соединительной тяги 51 и коромысел 50 и 52, которые смонтированы в шарнирах 53 и 54. Шарниры 47 и 53 соединены осью 55 вращения, шарниры 48 и 54 - осью 56 враш,ения. В шарнире 47 второй элемент 57 зацепления жестко соединен с коромыслом 44. Ролик 58 зацепления жестко соединен с коромыслом 44. Ролик 58 зацепления элемента 57 зацепления расположен в кулачковом пазу 35 со смеш,ением по отношению к ролику 31 зацепления на 90° в направлении, противоположном направлению вращения кулачкового диска 32. Шарниры 18 и 47, в которых смонтированы элементы 30 и 57 зацепления, размещены или на одной оси 22, или рядом друг с другом. С обеих сторон тягового и несущего органа 5 расположено по одной, неподвижной по отношению к стойке, вертикальной направляющей 42. В верхнем положении ленточного или скребкового конвейера в нее входит по одному щтифту 41. Направляющие 42 с нижнего конца расширены.
Устройство для транспортировки сосудов с жидкостями работает следующим образом .
Ленточный или скребковый конвейер (фиг. 1) занимает свое верхнее положение. Органы 2-4 погружаются в пробы жидкости или в содержащий смесь пробы с реактивом сосуд 11 и выполняют там их функции. При вращении. кулачкового диска 32 в направлении по стрелке (направление вращения) ролик 31 зацепления в переходном секторе 38 перемещается от сектора в четверть дуги окружности,.36 меньшего радиуса к сектору в четверть дуги окружности 37 большего радиуса. Че,рез элемент 30 зацепления антипараллельные кривошипные .механизмы 24-26 и 17, 28 и 29, оси 22, 23 вращения и балансиры 14-17 ленточный или скребковый конвейер перемещается в его нижнее положение, причем штифты 41 выскальзывают из вертикальных направляющих 42. В это время ролик 58 зацепления ведется в большом секторе в четверть дуги окружности 37, в результате чего он и присоединенные параллельно кривошипные механизмы 44-46 и 50-52
включая соответственно захваты 43 и 49, не изменяют их положения, а фиксируют его. В конечной фазе движения, опускания, по одному штифту 41 с обеих сторон 5 тягового и несущего органа 5 входит в захваты 43 и 49. При дальнейшем вращении кулачкового диска 32 ролик 31 зацепления, ведется в большом секторе в четверть дуги окружности 37, вследствие чего ленточный
Q или скребковый конвейер остается в своем положении. Ролик 58 зацепления в переходном секторе 39 перемещается к приводной оси 33.
Через элемент 57 зацепления и сопряженные параллельные кривошипные механизмы 44-46 и 50-52, а также захваты 43 и 49, тяговый и несущий орган 5 перемещается на расстояние, равное расстоянию между соседними сосудами 1L одного ряда сосудов, в результате чего сосуды. 11 занимают следующую позицию. В течение
0 последующего вращения кулачкового диска 32 ролик 58 зацепления остается в области небольшого сектора в четверть дуги окружности 36, а ролик 31 зацепления - в области переходного сектора 39.
5 Вследствие этого механизм перемещения тягового и несущего органа 5 сохраняет свое исходное или конечное положение, в то время как ленточный или скребковый конвейер приподнимается в свое верхнее положение, причем входящие в захваты 43
0 и 49 щтифты 41 выскальзывают из последних, а соседние штифты 41 верхней половины тягового или несущего органа 5 входят в область вертикальной направляюшей 42.
Во время последующего (четвертого) вращения на четверть оборота кулачкового диска 32 ленточный или скребковый конвейер сохраняет свое верхнее положение, а параллельные кривошипные механизмы 44-46 и 50-52 перемещаются в другое
0 исходное или конечное положение. Таким образом, рабочий цикл заканчивается. При дальнейшем вращении начинается новый рабочий цикл.
Признано изобретением по результатам экспертизы, осуществленной Ведомством по изобретательству Германской Демократической Республики.
