Настоящее изобретение относится к модулю автоматизации для ручного введения и извлечения биологических образцов, которые должны быть срочно обработаны модулем исследования для лабораторной диагностики.
В настоящее время в области автоматизации для лабораторной диагностики ощущается растущая потребность в срочном обеспечении исследования некоторых биологических образцов, переносимых в пробирках вдоль линии автоматизации посредством специальных транспортных устройств.
Рассматривая систему автоматизации как единое целое, уже известно устройство, в котором пробирки хранятся в больших количествах и выдаются по мере необходимости подходящим модулям исследования.
В таких системах автоматизации также известна возможность отделять обработку так называемых рутинных или обычных пробирок, которые идут обычным потоком вдоль системы, от тех пробирок, которые, с другой стороны, имеют некоторую срочность обработки (STAT, короткий срок выполнения работы), на основе заданных устройств, поскольку, например, образец, который они содержат, был только что взят у пациента, состояние которого может быть особенно критическим, и который вследствие этого требует немедленного диагноза и лечения.
Для этого в известных системах оба типа пробирок по существу следуют одним и тем же путем внутри системы автоматизации, хотя имеется набор оборудования для идентификации и маршрутизации пробирок, который, например, позволяет выбирать срочные пробирки и помещать их на линии автоматизации перед обычными пробирками, или передавать их вдоль пути, чтобы они в любом случае достигли модулей исследования, расположенных вдоль системы, с некоторым «приоритетом». Все это достигается благодаря высокому уровню автоматизации устройств, составляющих систему в целом.
Известно также, что использование полностью автоматизированного управления часто может быть неудобным, особенно если образцы вводятся в систему автоматизации посредством извлечения из типичных мест загрузки/разгрузки образца; фактически, поскольку эти места должны содержать большое количество пробирок, они являются большими по определению (в дополнение к тому, что они также очень дороги), и таким образом они не могут быть обеспечены в большом количестве вдоль системы (обычно один или два блока самое большее).
Понятно, что зачастую такое место может быть очень удаленным от части модулей исследования вдоль линии автоматизации, и таким образом организация быстрой маршрутизации образцов к таким удаленным модулям исследования может быть осложнена.
US 2010/0300831 описывает автоматизированную лабораторную систему, снабженную главной дорожкой и вторичной дорожкой для достижения или обхода модулей исследования.
WO 96/25712 описывает автоматизированное устройство, имеющее по меньшей мере две дорожки для маршрутизации контейнеров к одной или более выбираемым станциям исследования.
Следовательно, задача настоящего изобретения состоит в том, чтобы реализовать такой модуль автоматизации, который позволяет «непосредственное» введение образцов, подлежащих срочной обработке, осуществляя такое введение в такой точке линии автоматизации, которая настолько близка к соответствующему модулю исследования, насколько это возможно, то есть в такой точке линии автоматизации, которая должна осуществить доставку вышеупомянутых образцов для выполнения их непосредственной обработки.
Дополнительная задача настоящего изобретения должна заключаться в реализации такого модуля автоматизации, который обеспечивает быстрое извлечение образца, как только его обработка модулем исследования закончилась, чтобы быстро передать его к новому модулю исследования, отличному от предыдущего, либо чтобы отбросить его, не заставляя бесполезно перемещаться вдоль системы автоматизации.
В соответствии с настоящим изобретением эта и другие задачи решаются с помощью модуля автоматизации для ручного введения и извлечения биологических образцов, которые должны быть срочно состыкованы с модулем исследования для лабораторной диагностики, как описано в пункте 1 формулы изобретения.
Эти и другие признаки настоящего изобретения станут более понятными из следующего подробного описания одного варианта его осуществления, сделанного посредством неограничивающего примера со ссылками на сопровождающие чертежи, на которых:
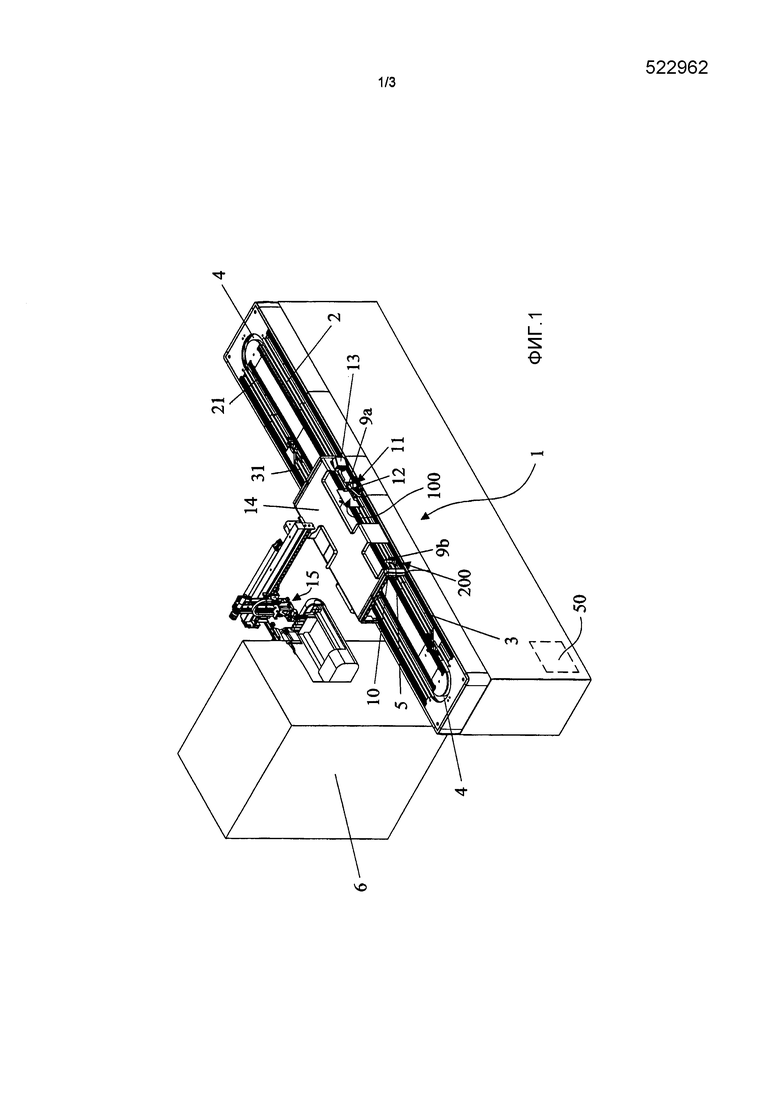
Фиг. 1 показывает вид в перспективе модуля автоматизации в соответствии с настоящим изобретением, соединенный с универсальным модулем исследования для лабораторной диагностики;
Фиг. 2 показывает вид сверху модуля автоматизации, изображенного на Фиг. 1, с удаленной крышкой;
Фиг. 3 подробно показывает точку ввода образца, содержащуюся в упомянутом модуле автоматизации;
Фиг. 4 подробно показывает точку извлечения образца, содержащуюся в упомянутом модуле автоматизации.
Лабораторная система автоматизации включает в себя множество модулей, которые собираются друг с другом в различном количестве и согласно различным конфигурациям для того, чтобы удовлетворить различные требования исследовательских лабораторий. Модули, находящиеся рядом друг с другом, действуют совместно для того, чтобы образовать систему автоматизации в целом. Система автоматизации также включает в себя модули 6 исследования для лабораторной диагностики.
Автоматизированные модули 1 (Фиг. 1) в соответствии с настоящим изобретением предназначены для ручного введения и извлечения биологических образцов, которые должны быть срочно состыкованы с модулем 6 исследования, фактически пропуская путь, который пробирки 10 должны были бы проделать, если бы они были введены в систему автоматизации через одно или более мест загрузки/выгрузки.
Каждый из таких модулей 1 снабжен двумя парами дорожек, в частности первой 2 и второй 21 основными дорожками и первой 3 и второй 31 вторичными дорожками, по которым транспортирующие устройства 5 перемещаются для более быстрой транспортировки очень срочных пробирок 10 непосредственно к модулю 6 исследования, следуя пути, который ограничен самим модулем 1 благодаря наличию на обоих концах первой 2 и второй 21 основных дорожек двух U-образных поворотных модулей 4, которые позволяют транспортирующим устройствам 5, содержащим или не содержащим пробирки 10 и непрерывно циркулирующим вдоль модуля 1, непосредственно перемещаться с первой основной дорожки 2 вдоль одной стороны модуля на вторую основную дорожку 21 вдоль другой стороны модуля 1 и наоборот.
Напротив второй вторичной дорожки 31 модуля 1, вдоль одной из двух его больших сторон находится модуль 6 исследования, предназначенный для приема образцов биологических материалов и выполнения различных видов их исследования. Взаимодействие может осуществляться, например, в соответствии с вариантом осуществления, показанным на Фиг. 1, с помощью известного механического устройства 15, снабженного захватывающими пальцами. Оно предназначено для извлечения пробирок 10 из каждого транспортирующего устройства 5, циркулирующего вдоль модуля 1, для того чтобы поместить их в модуль 6 исследования. Каждое транспортирующее устройство 5 содержит единственную пробирку 10, так что как только биологический образец пробирки 10 готов, она может быть срочно отправлена вдоль модуля 1 и, следовательно, непосредственно и срочно к модулю 6 исследования. Противоположная операция выполняется в конце исследования пробирок 10 в модуле 6, то есть модуль 6 исследования помещает пробирки 10 с помощью механического устройства 15 обратно в одно из упомянутых транспортирующих устройств 5 вдоль модуля 1. Следует отметить, как сказано, что использование механического устройства 15 для передачи пробирки 10 в модуль 6 исследования и обратно от упомянутого модуля 6 исследования к второй вторичной дорожке 31 является только одним из возможных решений, которые могут быть приняты для соединения автоматизированного модуля 1 и модуля 6 исследования друг с другом, и, следовательно, такое решение показано на Фиг. 1 исключительно в иллюстративных целях.
С другой стороны, точка 100 ввода образца (Фиг. 3), включающая в себя первый остановочный пункт 7a транспортирующих устройств 5, предусмотрена на первой вторичной дорожке 3 другой стороны модуля 1, который связан с первой антенной 8a, расположенной ниже ленточного конвейера вторичной дорожки 3, и предназначенной для обнаружения транспортирующего устройства 5, остановившегося в первом остановочном пункте 7a. Кроме того, имеется первый датчик 9a для обнаружения пробирки 10, содержащейся в транспортирующем устройстве 5.
Такая точка 100 введения образца дополнительно включает в себя устройство 11 вращения транспортирующего устройства 5, снабженное двигателем, которое считывает штриховой код, напечатанный на этикетке 12, наклеенной на пробирку 10, с помощью средства 13 считывания штрихового кода.
На той же самой стороне модуля 1 и вдоль той же самой первой вторичной дорожки 3 (левее на Фиг. 1 и 2) имеется точка 200 извлечения образца (Фиг. 4), которая включает в себя второй остановочный пункт 7b, вторую антенну 8b и второй датчик 9b для того, чтобы обнаружить пробирку 10 с теми же самыми функциями, которые уже были описаны выше. Точка 200 извлечения находится перед точкой 100 ввода, то есть левее, чем точка 100 ввода, поскольку транспортирующие устройства 5 перемещаются слева направо вдоль первой вторичной дорожки 3 так, что упомянутая последовательность выполнена с возможностью перемещения транспортирующих устройств 5 от точки 200 извлечения к точке 100 ввода. Близость на одной и той же первой вторичной дорожке 3 между точкой 100 ввода и точкой 200 извлечения пробирок 10 с достижением преимущества позволяет быстро действовать оператору, который должен сначала срочно ввести пробирки 10 для их маршрутизации непосредственно к модулю 6 исследования и исследовать их за очень короткое время, а затем должен быстро и срочно извлечь исследованные пробирки 10, и он может сделать это в непосредственной близости от точки 100 ввода; таким образом, оператор не должен двигаться, то есть перемещаться вдоль пути автоматизированной системы.
Модуль 1 может быть накрыт крышкой 14 (Фиг. 1), подходящим образом открытой в точке 100 ввода и в точке 200 извлечения, где оператор должен иметь возможность действовать вручную в соответствии с тем, что будет еще более подробно описано в дальнейшем.
Модуль 1 обычно размещает образцы биологических материалов так, чтобы представить их модулю 6 исследования как можно быстрее. Это может быть необходимым в особо срочных ситуациях, когда невозможно ожидать, пока вышеупомянутые образцы проследуют по обычному пути вдоль всей линии автоматизированной системы, поскольку особо срочная ситуация требует немедленного исследования и диагностики. Обычно модуль 6 исследования исследует пробирки 10, поступающие из автоматизированной системы. Модуль 1 предназначен для того, чтобы очень срочные пробирки 10 могли пропустить кружной путь автоматизированной системы и непосредственно и срочно попасть в модуль 6 исследования. Очень срочные пробирки 10 не загружаются в автоматизированную систему, так как они по чрезвычайно срочным причинам требуют срочного исследования. Модуль 1 позволяет вводить, исследовать и извлекать пробирки 10 в очень короткое время, с большой быстротой и сохранением очень срочных пробирок 10 в модуле 1 и модуле 6 исследования. Таким образом, само исследование и быстрое извлечение после исследования очень срочных пробирок 10 из модуля 1 только в точке 200 извлечения, которая находится в непосредственной близости от точки 100 ввода, становятся намного быстрее, делая таким образом использование упомянутого модуля 1 даже единственным оператором чрезвычайно выгодным.
Введение образцов в модуль 1 производится вручную оператором в точке 100 ввода образцов. Модуль 1 настраивается так, чтобы в точке 100, где оператор может ввести пробирку, всегда были пустые транспортирующие устройства, по одному за раз, чтобы пробирки 10, содержащие биологические материалы, только что взятые у пациента, могли быть срочно исследованы. Каждая пробирка 10 соответственно маркируется на предыдущем этапе этикеткой 12, снабженной штриховым кодом, содержащим идентификатор пациента, также количество и тип тестов, которые должны быть выполнены.
Конечно, пробирка 10 сначала вводится в транспортирующее устройство 5, уже остановившееся в первом остановочном пункте 7a (и обнаруженное антенной 8a) в точке 100 ввода, и после этого последовательно заполняются любые другие транспортирующие устройства 5, стоящие в очереди.
В этой точке, как только наличие пробирки 10 было обнаружено первым датчиком 9a (Фиг. 3), запускается вращение транспортирующего устройства 5 посредством устройства вращения 11, что позволяет средству 13 считывания штрихового кода обнаружить штриховой код на этикетке 12, нанесенной на пробирку 10.
Модуль автоматизации 1 дополнительно включает в себя центральный блок 50 управления (Фиг. 1), который, как только информация от средства 13 считывания штрихового кода получена, проверяет, должна ли только что извлеченная пробирка 10 на самом деле быть направлена к модулю 6 исследования. Как только такое подтверждение получено, первый остановочный пункт 7a открывается, так что транспортирующее устройство 51 с пробиркой 10 (Фиг. 2) отправляется вдоль первой основной дорожки модуля 1.
Как только U-образный поворотный модуль 4 пройден, транспортирующее устройство 52, снабженное пробиркой 10, достигает второй основной дорожки 21 на той стороне модуля 1, которая соединена с модулем 6 исследования, и, в частности, оно отклоняется вдоль его второй вторичной дорожки 31, которая выполнена с возможностью действовать в качестве дорожки приоритетного исследования для упомянутых транспортирующих устройств 5. Здесь извлечение имеет место, например, с помощью устройства 15 механического захвата пробирки 10 и ее помещения в модуль 6 исследования. Как уже было упомянуто, многочисленные другие способы соединения между модулем 1 и модулем 6 исследования могут быть обеспечены в соответствии с их формой и формой альтернативных устройств вместо устройства 15 механического захвата.
После этого модуль 6 исследования выполняет фактическую исследовательскую обработку образца.
Операция повторяется каскадным образом для образцов, введенных в точке 100 ввода вслед за первым, выполняя таким образом последовательный выпуск из первого остановочного пункта 7a вдоль первой вторичной дорожки 3, а затем вдоль первой основной дорожки 2, и последовательное прибытие с другой стороны модуля 1 вдоль второй основной дорожки 21, а затем вдоль второй вторичной дорожки 31 к модулю 6 исследования.
Транспортирующее устройство 5, только что лишенное пробирки 10, поскольку она была загружена в модуль 6 исследования, может быть немедленно выпущено на вторую вторичную дорожку 31 для возврата на вторую основную дорожку 21, а затем, после прохождения следующего U-образного поворотного модуля 4, вдоль другой стороны модуля 1 на первую основную дорожку 2. Однако может произойти случай, в котором транспортирующее устройство 5 фактически не выпускается, так как модуль 6 исследования, в дополнение к размещению новой пробирки 10 также собирается выдать ранее введенную и таким образом уже исследованную пробирку; в таком случае транспортирующее устройство 5, только что освобожденное от одной пробирки 10, остается заблокированным, чтобы вскоре принять другую пробирку, выгруженную из модуля 6 исследования.
Решение относительно того, освобождать ли транспортирующее устройство 5, является прерогативой центрального блока 50 управления, который за счет получения информации от датчиков 9a, 9b знает время выпуска каждой пробирки 10 из модуля 6 исследования и может поэтому управлять всем процессом.
Пустое или полное транспортирующее устройство 5 возвращается вдоль второй основной дорожки 21 (например, посредством известного автоматического устройства возврата) и, как только U-образный поворотный модуль 4 (слева на Фиг. 2) будет пройден, попадает на первую основную дорожку 2. Упомянутые первая 2 и вторая 21 основные дорожки выполнены с возможностью поддерживать непрерывную циркуляцию упомянутых транспортирующих устройств 5 на пути ожидания, чтобы затем направить их к вторичным дорожкам 3, 31. Транспортирующее устройство 5 может быть отклонено или не отклонено от первой основной дорожки 2 в направлении точки 200 извлечения образца вдоль первой вторичной дорожки 3, либо оно может остаться на пути ожидания вдоль первой основной дорожки 2 и второй основной дорожки 21.
В частности, если транспортирующее устройство 53 (Фиг. 2) содержит пробирку 10 на выходе из модуля 6 исследования, оно определенно отклоняется к точке 200 извлечения, чтобы встать в очередь с другими транспортирующими устройствами 5 в упомянутой точке 200 извлечения на первой вторичной дорожке 3 так, чтобы пробирка 10 была как можно скорее вручную извлечена оператором. Это происходит, когда транспортирующее устройство 53 останавливается на втором остановочном пункте 7b и пробирка 10 обнаруживается вторым датчиком 9b присутствия пробирки; после такого обнаружения пробирка 10 может наконец быть извлечена оператором.
Конечно, в случае последовательного прибытия множества транспортирующих устройств 5, содержащих исследованные пробирки 10, они помещаются друг за другом, формируя очередь вблизи точки 200 извлечения образцов; для оператора важно ожидать, пока каждое транспортирующее устройство 5 достигнет первого положения в очереди на втором остановочном пункте 7b перед извлечением нужной пробирки 10. Это нужно для того чтобы позволить датчику 9b присутствия пробирки выполнить подходящее обнаружение, по одному за раз, для каждой пробирки 10, которая должна быть извлечена вручную, чтобы последовательно закрыть цикл обработки каждой из них в автоматизированном модуле 1.
Каждое транспортирующее устройство 5, освобожденное в точке 200 извлечения образцов, выпускается затем остановочным пунктом 7b и затем возвращается в точку 100 ввода образцов, опционально вставая в очередь пустых транспортирующих устройств 5.
В большинстве случаев пустые транспортирующие устройства 5 никогда не должны отсутствовать в точке 100 ввода образцов, чтобы справиться с любыми внезапными потребностями введения новых срочных образцов в модуль 1.
Такая потребность всегда иметь пустые транспортирующие устройства 5, доступные в точке 100, также влияет на то, маршрутизируется ли входящее пустое транспортирующее устройство 5 вдоль первой вторичной дорожки 3 с противоположной стороны модуля 1, то есть той стороны, которая соединена с модулем 6 исследования.
Фактически, сразу после прохождения U-образного поворотного модуля 4 слева (Фиг.2) транспортирующее устройство 5 может быть в любом случае отклонено вдоль первой вторичной дорожки 3, даже если оно является пустым, если в это время в точке 200 извлечения образцов нет никакого транспортирующего устройства 5 и если одновременно существует также временная нехватка в очереди транспортирующих устройств 5 в точке 100 ввода образцов. Фактически, таким образом, поскольку второй датчик 9b не обнаруживает наличия пробирки и поэтому нет необходимости ожидать, когда оператор вручную извлечет что-либо, транспортирующее устройство 5 выпускается практически немедленно из остановочного пункта 7b и встает в очередь в точке 100 ввода образцов, исправляя таким образом (частично или даже полностью) упомянутую выше временную нехватку.
И наоборот, нет никакой потребности в отклонении пустого транспортирующего устройства 5 вдоль первой вторичной дорожки 3, если очередь заполненных транспортирующих устройств 5 уже присутствует в точке 200 извлечения образцов. Фактически это транспортирующее устройство, как только соответствующая пробирка 10 была извлечена на втором остановочном пункте 7b, встает в очередь в точке 100 ввода образцов, устраняя любой недостаток транспортирующих устройств 5 в точке 100. Следовательно, в этом случае пустое транспортирующее устройство 54 (Фиг. 2) не отклоняется и продолжает следовать вдоль первой основной дорожки 2 и вдоль второй основной дорожки 21; и так продолжается до тех пор, пока не появится потребность маршрутизировать его вдоль второй вторичной дорожки 31 для взаимодействия с модулем 6 исследования таким образом, чтобы принять от него пробирку 10, или отклонить его на следующий круг, все еще в пустом состоянии, вдоль первой вторичной дорожки 3 с другой стороны, поскольку, например, очередь в точке 200 очистилась.
Очередь пустых транспортирующих устройств 5, остановленных в точке 100 ввода образцов, из-за ограничений пространства вдоль вторичной дорожки 3 не может превышать заданного количества таких транспортирующих устройств 5, которое опционально может быть установлено по желанию в соответствии с потребностями; по этой причине, если они продолжают прибывать в точку 100, поскольку они выпускаются вторым остановочным пунктом 7b, и такое разрешенное количество превышается, транспортирующие устройства 55 поочередно выпускаются из точки 100, даже если они не загружены новыми образцами, только для того чтобы очистить очередь, образовавшуюся в точке 100 ввода образцов. Такие транспортирующие устройства 55 временно циркулируют вдоль пути ожидания основных дорожек 2, 21, совершая непрерывный цикл, то есть непрерывную циркуляцию, из которой они извлекаются обратно по мере необходимости.
Другой случай, который предусматривает выпуск транспортирующих устройств 5 из точки 100 ввода образцов без их фактического заполнения пробирками 10, это случай, в котором пробирки 10 должны быть выгружены из модуля 6 исследования и имеется нехватка (если не полное отсутствие) транспортирующих устройств 5, которые могли бы принять такие пробирки 10. С этой целью транспортирующие устройства 5 таким образом вызываются обратно из точки 100 введения образцов и они добавляются в очередь вдоль второй вторичной дорожки 31 в непосредственной близости от интерфейса между модулем 1 и модулем 6 исследования. Транспортирующие устройства 5, которые покидают точку 100, снова заменяются транспортирующим устройствами, выпущенными из точки 200, как только оператор освобождает их от соответствующей пробирки 10.
Как можно понять, общее управление выпуском или удержанием транспортирующих устройств 5 вдоль всего модуля 1 (и таким образом как на стороне с точками 100 и 200, так и на противоположной стороне) опять же является ответственностью центрального блока 50 управления.
В идеале результатом, достигаемым в конце рабочего цикла с множеством образцов, начинающегося с последовательного введения образцов в точке 100, является их удаление, снова в последовательности, из точки 200, так что только пустые транспортирующие устройства 5 продолжают циркулировать вдоль модуля 1. Конечно, это является идеальным решением, потому что на основе непредвиденных потребностей введение новых пробирок 10 в точке 100 может быть нерегулярным; таким образом, множественные циклы могут перекрывать друг друга так, что в конце обработки серии образцов, другие новые образцы уже вставлены и таким образом циркулируют вдоль модуля 1.
Следовательно, одним из инновационных аспектов настоящего изобретения является предложение в области лабораторной диагностической автоматизации иметь один или более модулей 1, по существу изолированных от остальной части автоматизированной системы, каждый из которых непосредственно взаимодействует с конкретным модулем 6 исследования; это является функциональным для ручного, прямого и непосредственного введения оператором пробирок 10, содержащих биологический материал, который должен быть обработан очень срочно и таким образом должен быть быстро и непосредственно направлен к модулю 6 исследования.
В конце исследования, выполненного модулем 6, пробирка 10 возвращается вдоль модуля 1 и может быть затем извлечена, опять же вручную, оператором, например для того, чтобы перенести ее к последующему и подобному модулю 1 с целью взаимодействия с другим модулем 6 исследования. Точка 200 извлечения и точка 100 ввода находятся на очень коротком расстоянии друг от друга, так как они выполнены с возможностью их обслуживания также одним человеком-оператором.
На практике было замечено, что описанное оборудование может решить намеченные задачи, преодолевая недостатки уровня техники, где образец биологического материала зачастую вводится или извлекается вдоль автоматизированной линии через одно или более мест загрузки/разгрузки, расположенных в заданных точках вдоль автоматизированной системы.
Во-первых, эти места загрузки/разгрузки не направляют образцы немедленно вдоль системных маршрутов, так как введение каждой пробирки в соответствующее транспортирующее устройство, то есть вдоль автоматизированной линии, происходит только после выборочной загрузки самих пробирок, например, устройством механического захвата.
Более того, такие места загрузки/разгрузки являются чрезвычайно большими, и на основании этого в автоматизированной системе, конечно же, может присутствовать лишь небольшое количество таких блоков. Следовательно, в уровне техники пробирки 10 могут также находиться в очень отдаленных точках от конкретного модуля 6 исследования, и если есть потребность срочно выполнить исследование с помощью такого конкретного модуля 6 исследования, только что введенного посредством таких мест загрузки/разгрузки, образец может находиться очень далеко от нужного модуля 6 исследования и таким образом прежде чем он достигнет нужного модуля исследования, может пройти длительное время. Это, конечно, способствует потере драгоценного времени, что является еще более важным, если состояние пациента, которому принадлежит биологический образец, является критическим.
С другой стороны, благодаря настоящему изобретению образец в пробирке 10, только что исследованный, с достижением преимущества возвращается оператору скорейшим образом, что позволяет оператору быстро перенести его к следующему модулю 1, в свою очередь соединенному с дополнительным модулем 6 исследования, или избавиться от него. Это предотвращает то, что происходит в уровне техники, то есть то, что образец пробирки 10 должен проделать длинный путь вдоль автоматизированной линии, чтобы достичь такого дополнительного модуля 6 исследования или вместе с множеством пробирок 10 снова достичь места загрузки/разгрузки, в котором он должен быть выгружен.
Различные изменения и вариации могут быть выполнены в настоящем изобретении и все они входят в объем изобретательского замысла.
На практике используемые материалы, а также формы и размеры могут быть любыми в соответствии с требованиями.


Настоящее изобретение относится к модулю автоматизации для ручного введения и извлечения биологических образцов, которые должны быть срочно обработаны модулем исследования для лабораторной диагностики. Автоматизированный модуль (1) для ручного введения и извлечения биологических образцов, которые должны быть срочно обработаны модулем (6) исследования для лабораторной диагностики автоматизированной системы, содержит две основные дорожки, два U-образных поворотных модуля (4) и две вторичные дорожки, по которым перемещаются транспортирующие устройства (5), каждое из которых содержит пробирку (10) для упомянутых биологических образцов. Причем первая вторичная дорожка (3) снабжена точкой (100) ввода упомянутых пробирок (10) в упомянутые транспортирующие устройства (5) и точкой (200) извлечения упомянутых пробирок из упомянутых транспортирующих устройств (5). При этом точка (200) извлечения и точка (100) ввода расположены друг за другом вдоль одной и той же первой вторичной дорожки (3), а точка (200) извлечения расположена перед точкой (100) ввода, и точка возврата от упомянутой первой вторичной дорожки (3) к первой основной дорожке (2) расположена после точки (100) ввода. Причем упомянутая последовательность выполнена с возможностью побуждать транспортирующее устройство (5) перемещаться от точки (200) извлечения к точке (100) ввода. При этом упомянутая вторая вторичная дорожка (31) непосредственно соединена с упомянутым модулем (6) исследования и является подходящей для того, чтобы служить в качестве дорожки приоритетного исследования для упомянутых транспортирующих устройств (5). Кроме того в точке (100) ввода упомянутых пробирок (10) находится первый остановочный пункт (7a), первая антенна (8a), предназначенная для обнаружения упомянутых транспортирующих устройств (5), первый датчик (9a) для обнаружения упомянутых пробирок (10) и устройство (11) вращения упомянутых транспортирующих устройств (5) для обнаружения штрихового кода, напечатанного на этикетках (12), наклеенных на упомянутых пробирках (10), с помощью средства (13) считывания штрихового кода. При этом в точке (200) извлечения упомянутых пробирок (10) находится второй остановочный пункт (7b), вторая антенна (8b), предназначенная для обнаружения упомянутых транспортирующих устройств (5), и второй датчик (9b) для обнаружения упомянутых пробирок (10).Техническим результатом является разработка модуля автоматизации, который обеспечивает быстрое и своевременное извлечение образца, а также обеспечивает быстро передать его к новому модулю исследования. 1 з.п. ф-лы, 4 ил.
1. Автоматизированный модуль (1) для ручного введения и извлечения биологических образцов, которые должны быть срочно обработаны модулем (6) исследования для лабораторной диагностики автоматизированной системы, отличающийся тем, что
упомянутый автоматизированный модуль (1) содержит первую (2) и вторую (21) основные дорожки, два U-образных поворотных модуля (4) и первую (3) и вторую (31) вторичные дорожки, по которым перемещаются транспортирующие устройства (5), каждое из которых содержит пробирку (10) для упомянутых биологических образцов,
причем первая вторичная дорожка (3) снабжена точкой (100) ввода упомянутых пробирок (10) в упомянутые транспортирующие устройства (5) и точкой (200) извлечения упомянутых пробирок из упомянутых транспортирующих устройств (5),
причем точка (200) извлечения и точка (100) ввода расположены друг за другом вдоль одной и той же первой вторичной дорожки (3),
причем точка (200) извлечения расположена перед точкой (100) ввода, и точка возврата от упомянутой первой вторичной дорожки (3) к первой основной дорожке (2) расположена после точки (100) ввода, причем упомянутая последовательность выполнена с возможностью побуждать транспортирующее устройство (5) перемещаться от точки (200) извлечения к точке (100) ввода,
причем первая (2) и вторая (21) основные дорожки и упомянутых два U-образных поворотных модуля (4), присутствующих по их концам, выполнены с возможностью поддерживать непрерывную циркуляцию упомянутых транспортирующих устройств (5) вдоль пути ожидания, чтобы направить их к вторичным дорожкам (3, 31),
причем упомянутая вторая вторичная дорожка (31) непосредственно соединена с упомянутым модулем (6) исследования и является подходящей для того, чтобы служить в качестве дорожки приоритетного исследования для упомянутых транспортирующих устройств (5),
причем упомянутые транспортирующие устройства (5),
выходящие из модуля (6) исследования, являются подходящими для постановки в очередь вдоль первой вторичной дорожки (3) в точке (200) извлечения;
в соответствии с упомянутой точкой (100) ввода упомянутых пробирок (10), содержащих упомянутые биологические образцы, в упомянутых транспортирующих устройствам (5) находятся первый остановочный пункт (7a), первая антенна (8a), предназначенная для обнаружения упомянутых транспортирующих устройств (5), первый датчик (9a) для обнаружения упомянутых пробирок (10) и устройство (11) вращения упомянутых транспортирующих устройств (5) для обнаружения штрихового кода, напечатанного на этикетках (12), наклеенных на упомянутых пробирках (10), с помощью средства (13) считывания штрихового кода;
в соответствии с упомянутой точкой (200) извлечения упомянутых пробирок (10), содержащих упомянутые биологические образцы, из упомянутых транспортирующих устройств (5) находятся второй остановочный пункт (7b), вторая антенна (8b), предназначенная для обнаружения упомянутых транспортирующих устройств (5), и второй датчик (9b) для обнаружения упомянутых пробирок (10).
2. Автоматизированный модуль (1) по п. 1, отличающийся тем, что он содержит центральный блок (50) управления для управления маршрутизацией упомянутых транспортирующих устройств (5) вдоль всего модуля (1).
| US2010300831 A1 02.12.2010 | |||
| WO9625712 A1 22.08.1996 | |||
| US2011045958 A1 24.02.2011 | |||
| Каталог продукции для профессиональной и децентрализованной диагностики ООО Рош Диагностика Рус, стр | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

