Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в соответствующих механизмах с индивидуальным электроприводом передвижения постоянного и переменного тока.
Известен ограничитель перекоса опор крана мостового типа, содержащий датчики положения колес относительно рельса, каждый из которых выполнен с подпружиненным рычагом, на одном конце которого смонтирован ролик, расположенный в горизонтальной плоскости, связанный с выключателем, выход которого включен в схему управления двигателями механизма перемещения крана, датчики расположены с одной стороны рельса, на уровне которого установлены ролики, выходы выключателей датчиков, расположенных по диагонали, соединены параллельно один другому и включены в схему управления двигателем соответствующего механизма перемещения крана (патент RU 2061645, опубл. 10.06.1996 г.).
Недостатками данного ограничителя являются низкая надежность механических датчиков перекоса, дискретное управление, а также невозможность коррекции поперечного смещения крана относительно подкрановых рельсов.
Известен ограничитель перекоса опор крана мостового типа, содержащий пороговые датчики перекоса, установленные на основаниях с двух концов опор крана по обе стороны головки подкранового рельса, причем упомянутые датчики по два последовательно соединены и подключены к источнику питания через катушку исполнительного реле (а.с. №998307, опубл. 23.02.1983 г., бюллетень №7).
Недостатками данного ограничителя являются дискретное управление и невозможность коррекции поперечного смещения крана относительно подкрановых рельсов.
Известно устройство для ограничения перекоса опор крана мостового типа, содержащее датчик перекоса опор крана, подключенный к входу блока управления электроприводом механизма передвижения крана и представляющий собой П-образный магнитопровод с установленными на его стержнях электрическими обмотками, расположенный над головкой подкранового рельса и закрепленный на опоре крана, и источник питания переменного напряжения (а.с. №1209576, опубл. 07.02.1986 г., бюллетень №5).
Недостатками данного устройства являются сложная конструкция датчика, необходимость предварительной настройки датчика, нечувствительность к поперечному смещению крана относительно подкрановых путей.
Известно устройство для направления движения мостового крана, содержащее бесконтактные датчики положения колес относительно рельса, вводящие резисторы в роторные цепи асинхронных электродвигателей (патент RU 2405735, опубл. 10.12.2009 г.).
Недостатками данного устройства являются низкая надежность из-за большого числа коммутационной аппаратуры, дискретное управление, необходимость применения асинхронных электродвигателей с фазным ротором, дополнительные потери энергии в резисторах, коррекция перекоса относительно только одного из рельсов подкранового пути.
Целью предлагаемого изобретения является обеспечение бесперекосного движения мостового крана, что способствует увеличению срока службы ходовой части крана, повышению коэффициента использования оборудования, сокращению расходов на его содержание и ремонт, повышению КПД механизма из-за снижения потребления электроэнергии на величину, необходимую для преодоления сил трения в точках контакта реборд с рельсами.
Технический результат достигается тем, что положение крана определяют по дифференциальным значениям, получаемым путем разности показаний бесконтактных датчиков, измеряющих расстояния от мест их установки до рельсов в соответствии с формулами:
Δ12=LД1-LД2,
Δ34=LД3-LД4,
где Δ12, Δ34 - дифференциальные значения;
LД1, LД2, LД3, LД4 - показания датчиков Д1 Д2, Д3, Д4 соответственно;
позволяющим однозначно идентифицировать перекос крана и его поперечное смещение относительно подкрановых путей, при этом с учетом направления движения крана происходит формирование сигнала коррекции, который вычитается из сигнала задания скорости одной из опор, и этим обеспечивают выравнивание крана; значение корректирующего воздействия рассчитывают пропорционально максимальной из Δ12 и Δ34 величин по формуле:
Uk=k×max(Δl2; Δ34),
где Uk - значение корректирующего воздействия;
k - коэффициент пропорциональности.
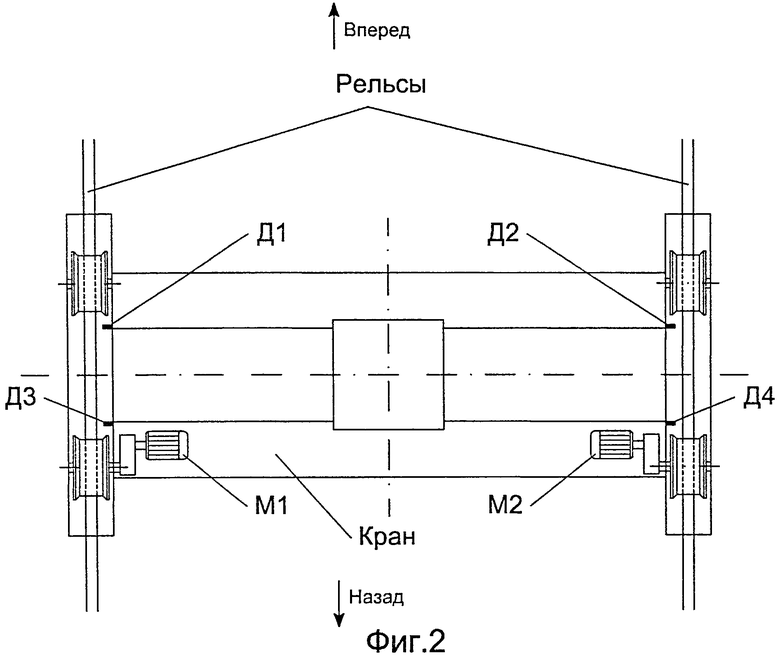
На фиг.1 представлена структурная схема системы управления электропривода передвижения мостового крана, обеспечивающей коррекцию перекоса. Здесь: М1, М2 - асинхронные электродвигатели с короткозамкнутым ротором; ПЧ - преобразователь частоты; ФП - функциональный преобразователь; PC - регулятор скорости; BR - датчик скорости; КOC - коэффициент обратной связи по скорости; ЗИ - задатчик интенсивности; Д1-Д4 - датчики расстояния; БС1-БС3 - блоки сопряжения сигналов; БКП - блок коррекции перекоса.
На фиг.2 представлен план расположения датчиков.
Система управления асинхронным электроприводом передвижения крана в данном случае представляет собой одноконтурную структуру скалярного управления скоростью (фиг.1). Сигнал обратной связи по скорости UOC1/UOC2, пропорциональный показаниям датчика скорости BR, вычитается из сигнала задания UЗC1/UЗC2. Полученный сигнал рассогласования поступает на вход регулятора скорости PC, который, в свою очередь, формирует сигнал задания частоты UЗf1/ UЗf2. Сигнал задания напряжения UЗU1/UЗU2 формируется с помощью функционального преобразователя ФП в соответствии с законом U/f=const, обеспечивающим постоянство перегрузочной способности асинхронного электродвигателя. Задатчик интенсивности ЗИ служит для плавного изменения задания скорости UЗC1/UЗC2 при ступенчатом входном сигнале UЗС, поступающем с пульта управления, что обеспечивает разгон/торможение крана с заданным предельным ускорением.
Блок коррекции перекоса БКП (фиг.1) выполняет функции вычисления Δ12 и Δ34, исходя из показаний датчиков Д1, Д2, Д3, Д4, а также формирования сигнала коррекции на основе полученных данных. Выходы датчиков подключены к БКП через блок сопряжения БС2. Сигнал sign[ω] поступает в БКП через БС3. Выходы БКП через БС1 подключены к сумматорам.
Устройство работает следующим образом. При движении крана без перекоса и поперечного смещения сигналы коррекции Uk1/Uk2, формируемые БКП, отсутствуют. Все процессы определяются в этом случае параметрами основной системы управления и заданием UЗС (фиг.1). При возникновении перекоса и/или поперечного смещения моста БКП формирует сигнал коррекции Uk1/Uk2, который вычитается из сигнала задания UЗC1/UЗC2 одной из опор, снижая ее скорость. Таким образом, происходит выравнивание крана и его смещение к центру колеи. В таком положении обе опоры располагаются на рельсах симметрично друг другу, что также позволяет свести к минимуму влияние непараллельности подкрановых путей. При формировании сигналов коррекции также учитывается текущее направление движения крана (сигнал sign[ω]), т.к. для эффективного устранения перекоса при различных направлениях движения требуются разные корректирующие воздействия. В том случае, когда кран остановлен и скорости опор равны нулю, сигналы коррекции всегда отсутствуют, независимо от того, как кран расположен на рельсах.
Вычисление сигнала коррекции происходит в два этапа. Сначала определяется та опора мостового крана, скорость которой необходимо уменьшить, т.е. определяется, какой из сигналов Uk1 и Uk2 в данный момент будет активным. Затем вычисляется значение самого корректирующего сигнала.
Алгоритм первого этапа обусловлен следующими соображениями. Каждая из величин Δ12 и Δ34 может принимать три значения: отрицательные, положительные и ноль. В случае отрицательного значения имеет место смещение соответствующей оси влево, при положительном значении наоборот - вправо. При нулевом значении Δ смещение отсутствует - колеса расположены практически симметрично относительно рельс. Всего возможно 32=9 различных таких комбинаций Δ12 и Δ34. С учетом двух возможных направлений движения крана общее число возможных комбинаций достигает 32×2=18, каждая из которых требует определенного корректирующего воздействия. При неподвижном состоянии моста сигналы коррекции отсутствуют (равны нулю) независимо от значений Δ12 и Δ34. В табл.1 представлено описание всех возможных положений крана с указанием корректирующих воздействий в зависимости от направления движения.
Значение активного корректирующего сигнала рассчитывается пропорционально максимальной величине А:
Uk=k×max(Δl2; Δ34).
Предлагаемое изобретение обеспечивает непрерывную коррекцию как перекоса мостового крана, так и его поперечного смещения.
Данное изобретение предполагает использование асинхронных электродвигателей с короткозамкнутым ротором, что повышает надежность электропривода, снижает его стоимость и эксплуатационные затраты, способствует тенденции внедрения энергосберегающих технологий. Также возможно применение электрических машин постоянного тока, но менее предпочтительно.
В качестве датчиков возможно применение различных бесконтактных измерителей расстояния (например, оптических, индуктивных). Датчики можно располагать как с внутренней стороны пролетных балок (как это показано на фиг.2), так и с внешней.
БКП представляет собой микропроцессорное устройство, например ПЛК (программируемый логический контроллер). Возможности современных ПЛК позволяют реализовать предложенный алгоритм расчета корректирующего сигнала, а также сопряжение интерфейсов без применения дополнительных специальных устройств.
движения
крана
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| Привод механизма перемещения опор мостового крана | 1985 |
|
SU1321661A1 |
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| Устройство для определения положения опоры крана относительно подкранового пути | 1981 |
|
SU971775A1 |
| Ограничитель перекоса мостового крана | 1980 |
|
SU906906A1 |
| Ограничитель перекоса опор крана мостового типа | 1981 |
|
SU998307A1 |
| Способ управления перекосом мостового или козлового крана | 2022 |
|
RU2783317C1 |
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
Изобретение относится к области мостовых кранов. При ограничениия перекоса мостового крана с асинхронным электроприводом передвижения (M1, M2), положение крана определяют по дифференциальным значениям Δ12 и Δ34, получаемым путем разности показаний бесконтактных датчиков (Д1, Д2, Д3, Д4), измеряющих расстояния от мест их установки до рельсов. С учетом направления движения крана происходит формирование сигнала коррекции (Uk1, Uk2), который вычитается из сигнала задания скорости (U3c1, U3c2) одной из опор, и этим обеспечивают выравнивание крана; значение корректирующего воздействия рассчитывают пропорционально максимальной из Δ12 и Δ34 величин по формуле: Uk=k×max(Δ12; Δ34). Достигается бесперекосное движение мостового крана. 1 табл., 2 ил.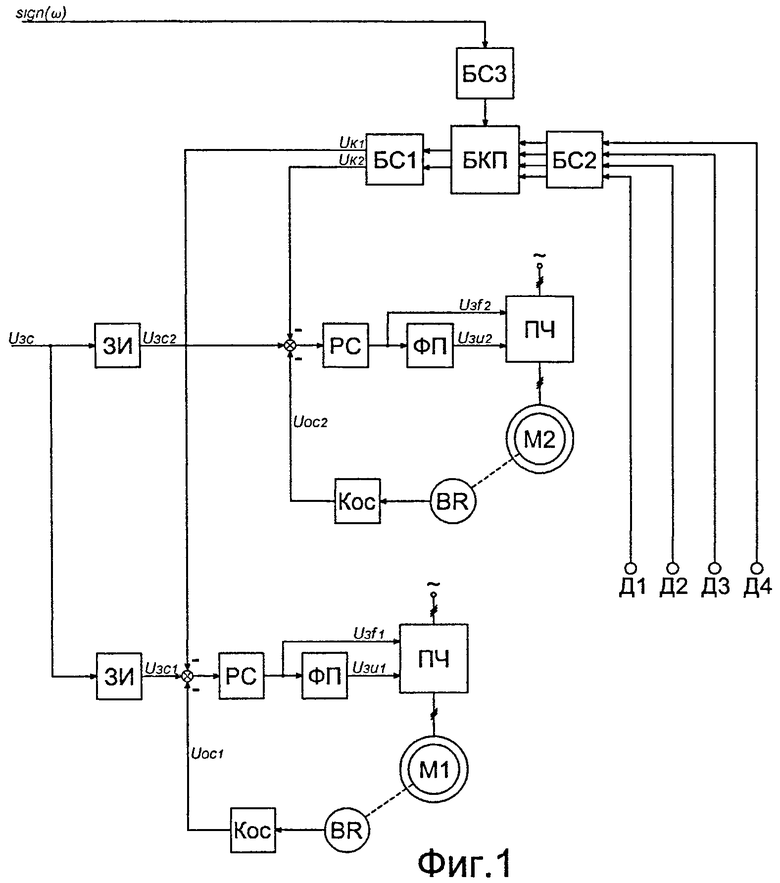
Способ ограничения перекоса мостового крана с асинхронным электроприводом передвижения, отличающийся тем, что положение крана определяют по дифференциальным значениям, получаемым путем разности показаний бесконтактных датчиков, измеряющих расстояния от мест их установки до рельсов в соответствии с формулами:
Δ12=LД1-LД2,
Δ34=LД3-LД4,
где Δ12, Δ34 - дифференциальные значения;
LД1, LД2, LД3, LД4 - показания датчиков Д1, Д2, Д3, Д4 соответственно;
позволяющим однозначно идентифицировать перекос крана и его поперечное смещение относительно подкрановых путей, при этом с учетом направления движения крана происходит формирование сигнала коррекции, который вычитается из сигнала задания скорости одной из опор, и этим обеспечивают выравнивание крана; значение корректирующего воздействия рассчитывают пропорционально максимальной из Δ12 и Δ34 величин по формуле:
Uk=k·max(Δ12; Δ34),
где Uk - значение корректирующего воздействия;
k - коэффициент пропорциональности.
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

