Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционного средства обнаружения (СО), построенного на радиолучевом или инфракрасном принципах обнаружения, для сигнализационного прикрытия развилки дороги [1].
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Во многом успех задержания нарушителя зависит от знания силами реагирования направления его движения. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание. Наиболее часто встречаемым элементом дорожной сети является развилка дорог.
На практике для сигнализационного прикрытия участков дорожной сети широко применяются однопозиционные СО, построенные на радиоволновом или инфракрасном принципах обнаружения, характеризующихся незначительной протяженностью зоны обнаружения (25-50 метров) [1].
Известен способ сигнализационного прикрытия развилки дороги, заключающийся в развертывании на развилке дороги однопозиционного радиолучевого или инфракрасного СО таким образом, чтобы его зона обнаружения (ЗО) проходила через место разветвления дороги и фиксации сигнала тревоги при появлении нарушителя в зоне обнаружения (фиг. 1).
Недостатком данного способа является то, что он позволяет только обнаруживать нарушителя на развилке дороги без какого-либо уточнения направления его движения. В то же время любая информация, уточняющая действия нарушителя, имеет большое значение для сил реагирования, так как позволяет сузить направление его поиска [2].
В других известных способах, которые позволяют определять направление движения нарушителя через развилку дорог, необходимо развернуть два и более СО.
Целью изобретения является получение возможности уточнять направление движения нарушителя, обнаруженного на развилке дороги, с применением только одного СО.
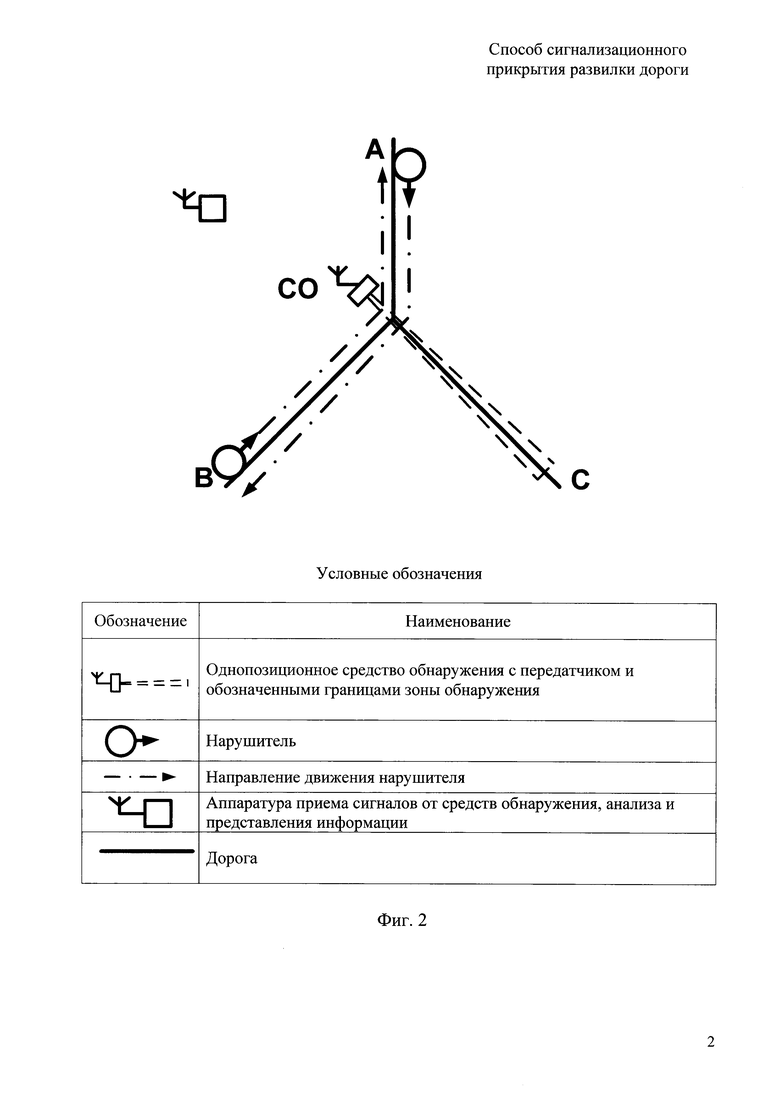
Для достижения поставленной цели разработан способ сигнализационного прикрытия развилки дороги, заключающийся в развертывании на развилке дороги однопозиционного радиолучевого или инфракрасного СО таким образом, чтобы его ЗО проходила через место разветвления дороги, ось ЗО лежала вдоль одной из двух расходящихся дорог, не менее 8/10 длины ЗО закрывала участок этой дороги, в фиксации сигнала тревоги и его длительности, определении направления движения обнаруженного нарушителя по алгоритму, устанавливающему принадлежность длительности сигнала тревоги от СО к одному из двух диапазонов временных интервалов, рассчитанных аналитически для группы из двух направлений, при движении по которым нарушитель пересекает ЗО поперек ее оси, и группы из четырех направлений, при движении по которым нарушитель пересекает ЗО вдоль ее оси, с учетом возможного диапазона скоростей нарушителя через развилку дороги, длины и ширины ЗО (фиг. 2, 3).
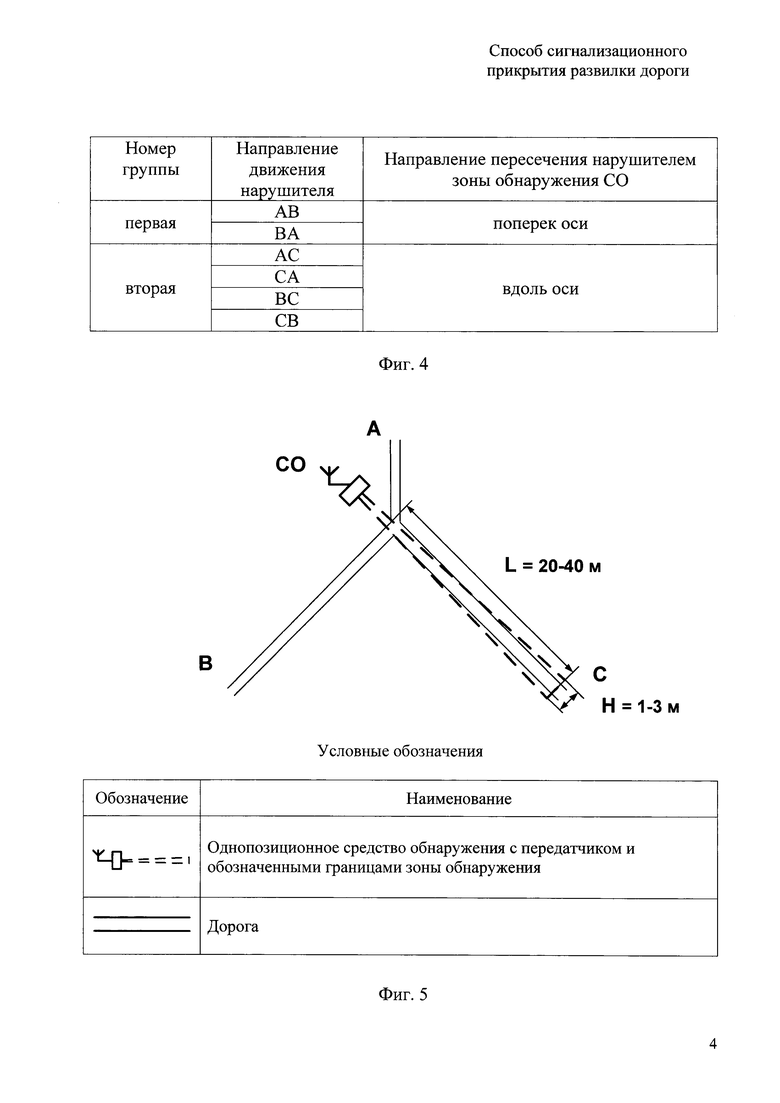
Через развилку дороги движение нарушителя возможно в шести направлениях: АВ, ВА, ВС, СВ, АС и СА. С учетом разработанной схемы ориентирования ЗО СО относительно расходящейся дороги, эти направления движения разделяются на две группы. Одна группа (первая) включает два направления (АВ, ВА), при движении по которым нарушитель пересекает ЗО только поперек ее оси (фиг. 2). Другая группа (вторая) включает четыре направления (ВС, СВ, АС и СА), при движении по которым нарушитель пересекает ЗО вдоль ее оси (фиг. 3, 4).
Согласно тактико-техническим характеристикам радиолучевых и инфракрасных СО длина их ЗО значительно превышает ширину. Так, длина ЗО до 25-50 метров, а ширина не более 2-3 метров [1]. Таким образом, время нахождения СО в режиме тревоги при пересечении нарушителем его ЗО вдоль оси будет значительно выше, чем время при его пересечении ЗО поперек оси при условии одинаковой скорости движения:

где t(L) - длительность сигнала тревоги при пересечении нарушителем ЗО СО вдоль ее оси, с.;
t(H) - длительность сигнала тревоги при пересечении нарушителем ЗО СО поперек ее оси, с.
С учетом размещения на местности, длина ЗО РЛ или ИК СО, сориентированной вдоль дороги, лежит в пределах 20-40 метров (что составляет 8/10 от всей длины зоны), ширина ЗО на максимальном удалении от средства составит 1-3 метра (фиг. 5). Время установления СО в дежурный режим (tDR) лежит в пределах 5 секунд [1].
Пеший нарушитель движется со скоростью, пределы которой зависят от состояния дороги [3, 4]. В предлагаемом способе для повышения достоверности определения места нарушения и упрощения расчетов берется расширенный диапазон скоростей: верхнее значение скорости (VMAX) принимается 9,0 км/час (2,5 м/с), нижнее значение (VMIN) - 3,0 км/час (0,83 м/с).

где VMAX, VMIN - максимально и минимально возможные скорости движения нарушителя через развилку дорог, м/с.
С учетом времени установления СО в дежурный режим (tDR) после выхода нарушителя из ЗО, максимально (VMAX) и минимально (VMIN) возможных скоростей движения нарушителя, размеров ЗО, предельные значения интервалов длительностей сигнала тревоги, сформированные СО при нахождении нарушителя в ЗО СО, находятся по формуле:

где t(H)MIN - минимальная длительность сигнала тревоги при пересечении нарушителем ЗО поперек ее оси, с;
t(H)MAX - максимальная длительность сигнала тревоги при пересечении нарушителем ЗО поперек ее оси, с;
t(L)MIN - минимальная длительность сигнала тревоги при пересечении нарушителем ЗО вдоль ее оси, с;
t(L)MAX - минимальная длительность сигнала тревоги при пересечении нарушителем ЗО вдоль ее оси, с.
В настоящее время в технике широко применяется технология нечеткого вывода [5]. Следуя ей, рассматриваемые интервалы времени можно представить графически в виде трапециевидной функции принадлежности, которая показывает, что ЗО СО пересечена нарушителем поперек ее оси или вдоль ее оси за определенный период времени, у которого есть нижнее значение (b, b’) (при максимальной скорости VMAX) и верхнее значение (с, с') (при минимальной скорости VMIN). В этих пределах уверенность в достоверности вывода ((I) о том, что нарушитель пересек ЗО СО поперек ее оси или вдоль нее максимальная и равна единице. При меньших (от (а) до (b), от (а') до (b')) или больших (от (с) до (d), от (с') до (d')) значениях времени уверенность в достоверности вывода (μ) о том, что нарушителем пересечена ЗО СО поперек ее оси или вдоль нее, меньше единицы (фиг. 6):
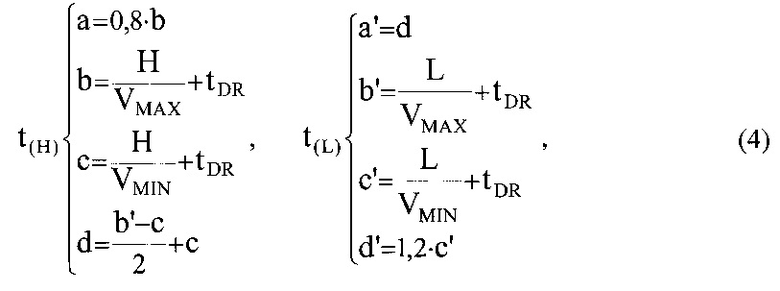
где а, b, с, d - параметры графика функции принадлежности длительности сигнала тревоги при пересечении нарушителем ЗО поперек ее оси, с;
а', b', с', d' - параметры графика функции принадлежности длительности сигнала тревоги при пересечении нарушителем ЗО вдоль ее оси, с.
Так, если поступил сигнал тревоги от СО с длительностью (t), необходимо отложить ее по оси абсцисс и через точку пересечения с одним из графиков функций принадлежности определить, двигался ли нарушитель поперек ЗО (направления АВ, ВА) или вдоль нее (направления ВС, СВ, АС, СА) (фиг. 6, 7).
Сущность изобретения поясняется чертежами, где:
- фиг. 1 - схема развертывания средства обнаружения в известном способе прикрытия развилки дороги;
- фиг. 2 - схема развертывания средства обнаружения на развилке дорог, с примерами направлений движения нарушителя при пересечении ЗО поперек ее оси;
- фиг. 3 - схема развертывания средства обнаружения на развилке дорог, с примерами направлений движения нарушителя при пересечении ЗО вдоль ее оси;
- фиг. 4 - таблица соответствия направлений движения нарушителя и направлений пересечения им зоны обнаружения;
- фиг. 5 - схема развертывания средства обнаружения в предлагаемом способе с указанием размеров;
- фиг. 6 - графики функции принадлежности временных интервалов длительности сигнала тревоги от СО направлениям движения нарушителя;
- фиг. 7 - параметры графиков функции принадлежности длительности сигнала тревоги, применяемые в алгоритме определения направления движения нарушителя;
- фиг. 8 - структурная схема взаимосвязи применяемых устройств при реализации способа.
При реализации способа применяются следующие устройства: средство 1 обнаружения с передатчиком, устройство 2 управления таймером, таймер 3, приемник 4 сигналов, решающее устройство 5, монитор 6 (фиг. 8).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание средства 1 обнаружения с передатчиком по установленной схеме (фиг. 5).
2. Развертывание на местности аппаратуры приема сигналов от средства 1 обнаружения, анализа и представления информации, включающей в себя: устройство 2 управления таймером, таймер 3, приемник 4 сигналов, решающее устройство 5, монитор 6 (фиг. 8).
3. Расчет параметров графиков функции принадлежности временных интервалов длительности сигнала тревоги направлениям движения нарушителя и загрузку их в решающее устройство 5 (фиг. 7).
Основной этап начинается при движении нарушителя через развилку дороги и включает:
1. Регистрацию приемником 4 сигнала тревоги от средства 1 обнаружения с передатчиком при пересечении нарушителем его ЗО, запуск таймера 3 устройством 2 управления таймером, начало отсчета им интервала времени и запись информации о поступлении сигнала тревоги от средства 1 обнаружения с передатчиком в решающее устройство 6 (фиг. 8).
2. С переходом средства 1 обнаружения с передатчиком в дежурный режим остановка работы таймера.
3. Запись в решающее устройство 5 значения длительности сигнала тревоги (фиг. 8).
4. Формирование вывода о направлении движения нарушителя решающим устройством 5 (фиг. 6, 7).
5. Обнуление таймера 3 устройством 2 управления таймером. Выведение результата о направлении движения нарушителя на монитор 6 (фиг. 8).
Технический результат заключается в получении возможности уточнять направление движения нарушителя, обнаруженного на развилке дороги (а именно, определяется, что он движется по одному из двух или одному из четырех заранее сгруппированных направлений движения), с применением только одного СО.
Источники информации
1. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов. - М: Горячая линия - Телеком, 2004. - 367 с.
2. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
3. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
4. Баленко, С.В. Школа выживания. - М.: 1994. - 140 с.
5. Леоненков, А.В. Нечеткое моделирование в среде MATLAB и fuzzy TECH / А.В. Леоненков. - СПб.: БХВ - Петербург, 2005. - 736 с.




Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционного средства обнаружения (СО), построенного на радиолучевом или инфракрасном принципах обнаружения, для сигнализационного прикрытия развилки дороги. Способ заключается в развертывании на развилке дороги однопозиционного радиолучевого или инфракрасного СО таким образом, чтобы его зона обнаружения (ЗО) проходила через место разветвления дороги, ось ЗО лежала вдоль одной из двух расходящихся дорог, не менее 8/10 длины ЗО закрывала участок этой дороги, в фиксации сигнала тревоги и его длительности, определении направления движения обнаруженного нарушителя по алгоритму, устанавливающему принадлежность длительности сигнала тревоги от СО к одному из двух диапазонов временных интервалов, рассчитанных аналитически для группы из двух направлений, при движении по которым нарушитель пересекает ЗО поперек ее оси, и группы из четырех направлений, при движении по которым нарушитель пересекает ЗО вдоль ее оси, с учетом возможного диапазона скоростей нарушителя через развилку дороги, длины и ширины ЗО. Способ включает подготовительный этап с развертыванием СО по установленной схеме и основной этап, который начинается с момента появления нарушителя на развилке и попадания его в ЗО СО. В ходе основного этапа направление движения определяется по разработанному алгоритму. Технический результат заключается в получении возможности уточнять направление движения нарушителя, обнаруженного на развилке дороги, с применением только одного СО. 8 ил.
Способ сигнализационного прикрытия развилки дороги, заключающийся в развертывании на развилке дороги однопозиционного радиолучевого или инфракрасного средства обнаружения таким образом, чтобы его зона обнаружения проходила через место разветвления дороги, фиксации сигнала тревоги при перемещении нарушителя через развилку, отличающийся тем, что ось зоны обнаружения средства обнаружения лежит вдоль одной из двух расходящихся дорог, не менее 8/10 длины зоны обнаружения закрывает участок этой дороги, длительность сигнала тревоги фиксируется, само направление движения обнаруженного нарушителя определяется по алгоритму, устанавливающему принадлежность длительности сигнала тревоги к одному из двух диапазонов временных интервалов, рассчитанных аналитически для группы из двух направлений, при движении по которым нарушитель пересекает зону обнаружения поперек ее оси, и группы из четырех направлений, при движении по которым нарушитель пересекает зону обнаружения вдоль ее оси, с учетом возможного диапазона скоростей нарушителя через развилку дороги, длины и ширины зоны обнаружения.
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2109344C1 |
| US 2010201561 A1, 12.08.2010 | |||
| US 3987428 A, 19.10.1976 | |||
| DE 102013107696 A1, 22.01.2015 | |||
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2468441C2 |
| С.М | |||
| Вишняков, Е.Ю | |||
| Андрианов | |||
| Радиоволновые извещатели | |||
| Выбор за инсталлятором."Мир и безопасность" | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

