Изобретение относится к гидроприводам опрокидывающих механизмов саморазгружающихся транспортных средств с электрической системой управления трансмиссией.
Известен гидропривод грузоподъемного устройства, задачей которого является обеспечение подъема изделия, расположенного на транспортной единице с колесными шасси, параллельно выбранной рабочей площадке на высоту, исключающую влияние колесных шасси на устойчивость и раскачивание изделия во время работы /1/.
Недостатком гидропривода является отсутствие блокировки несанкционированного подъема изделия, которое снижает устойчивость грузоподъемного устройства и увеличивает раскачивание изделия во время работы.
Известен гидропривод транспортной машины-самосвала, задачей которого является снижение аварийных потерь рабочей жидкости в транспортных машинах-самосвалах, использующих однополостные гидроцилиндры /2/.
Недостатком гидропривода является отсутствие блокировки несанкционированного подъема платформы, которое увеличивает аварийные потери рабочей жидкости в транспортных машинах-самосвалах, использующих однополостные гидроцилиндры.
Известен гидропривод подъемного механизма, задачей которого является повышение надежности работы гидропривода и в исключении самопроизвольного перемещения штока гидроцилиндра и, как следствие, - предотвращении падения груза при разрыве любой из магистралей, сообщенных с полостями гидроцилиндров /3/.
Недостатком гидропривода является отсутствие блокировки несанкционированного подъема платформы, которое снижает надежность работы гидропривода при самопроизвольном перемещении штока гидроцилиндра и, как следствие, падении груза при разрыве любой из магистралей, сообщенных с полостями гидроцилиндров.
Известен гидропривод опрокидывающего механизма транспортного средства с электрической системой управления трансмиссией, задачей которого является повышение безопасности движения транспортного средства за счет надежного и быстрого опускания платформы /4/.
Недостатком гидропривода является отсутствие блокировки несанкционированного подъема платформы, которое снижает безопасность движения транспортного средства при самопроизвольном несанкционированном подъеме платформы.
В качестве прототипа выбран гидропривод опрокидывающего механизма транспортного средства, содержащий гидроцилиндры подъема и опускания платформы, сообщенные с насосами и масляным баком двухпозиционным распределителем с управлением от электромагнитного гидрораспределителя с электрической системой управления, содержащей датчик положения платформы с управляемым ключом, связывающим электромагнит опускания платформы с выключателем управления электроприводом транспортного средства через диоды, реле, через нормально замкнутые контакты, которого включен электромагнит подъема платформы, при этом катушка реле подключена к электромагниту опускания платформы, а параллельно электромагниту опускания платформы подключена электрическая емкость /5/.
Недостатком гидропривода является отсутствие блокировки несанкционированного подъема платформы, которое снижает безопасность движения транспортного средства при самопроизвольном несанкционированном подъеме платформы.
Цель изобретения - повышение безопасности движения транспортного средства за счет блокировки несанкционированного подъема платформы.
Поставленная цель достигается тем, что в гидроприводе опрокидывающего механизма транспортного средства, содержащем гидроцилиндры подъема и опускания платформы, сообщенные с насосами и масляным баком двухпозиционным распределителем с управлением от электромагнитного гидрораспределителя с электрической системой управления, содержащей датчик положения платформы с управляемым ключом, связывающим электромагнит опускания платформы с выключателем управления электроприводом транспортного средства через диоды, реле, через нормально замкнутые контакты которого включен электромагнит подъема платформы, при этом катушка реле подключена к электромагниту опускания платформы, а параллельно электромагниту опускания платформы подключена электрическая емкость, и в электрической системе управления электромагнитного гидрораспределителя последовательно с нормально замкнутым контактом реле включена вторая кнопка включения электромагнита подъема платформы, один из контактов которой подключен непосредственно к потенциальному выводу обмотки электромагнита, а в цепь сообщения гидроцилиндров подъема и опускания платформы с насосами и масляным баком дополнительно включен трехходовой двухпозиционный распределитель, один из ходов которого соединен с поршневыми полостями гидроцилиндров подъема и опускания платформы.
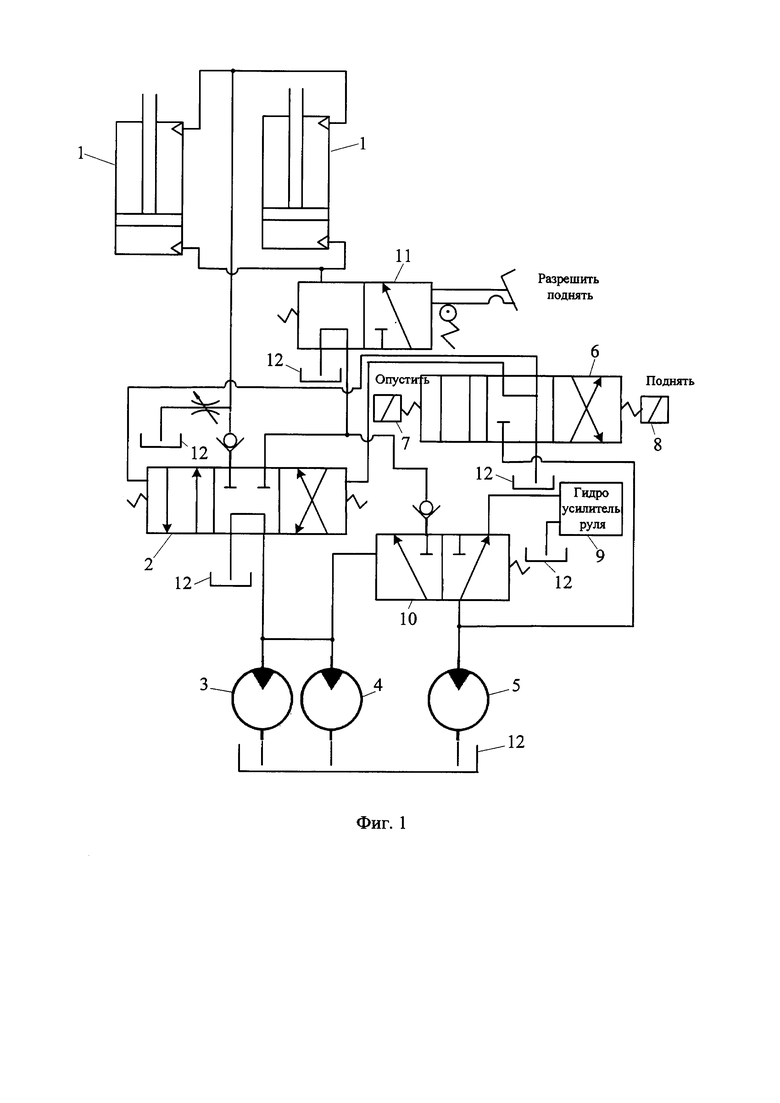
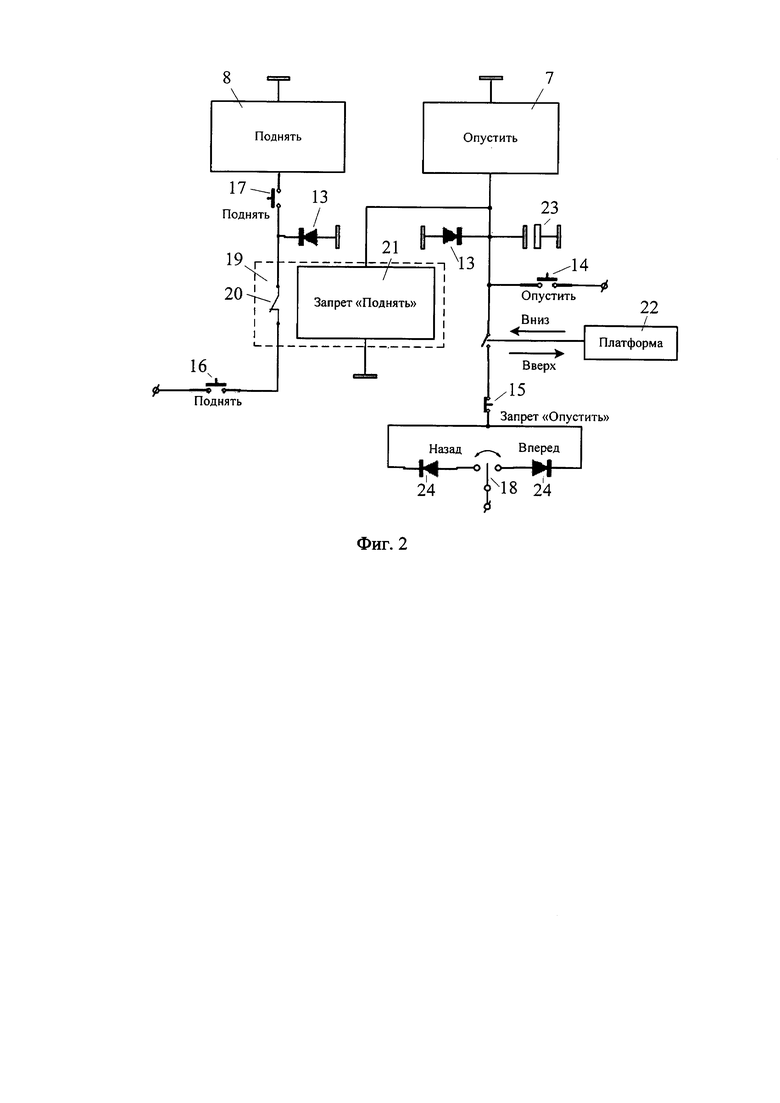
На фиг. 1 изображена схема объединенного гидропривода опрокидывающего механизма и усилителя рулевого управления транспортного средства; на фиг. 2 - электрическая схема управления объединенным гидроприводом транспортного средства с электрической трансмиссией.
Гидропривод содержит гидроцилиндры 1 подъема и опускания платформы, трехпозиционный золотниковый распределитель 2, насосы 3-5, электромагнитный распределитель 6 с электромагнитами 7 и 8, гидроусилитель 9 рулевого управления, двухпозиционный распределитель 10, трехходовой двухпозиционный распределитель 11 и масляный бак 12.
Электрическая схема управления объединенным гидроприводом содержит электромагнит 7 опускания платформы, электромагнит 8 подъема платформы, диоды 13, кнопки 14-17 управления, выключатель 18 управления электроприводом автосамосвала, реле 19 с нормально замкнутыми контактами 20 и катушкой 21, датчик положения платформы с ключом 22, электрическую емкость 23 и диоды 24.
Насосы 3 и 4 трубопроводами через трехпозиционный золотниковый распределитель 2 и трехходовой двухпозиционный распределитель 11 соединены с штоковыми и поршневыми полостями гидроцилиндров 1. Насос 5 трубопроводами соединен через двухпозиционный распределитель 10 с гидроусилителем рулевого управления 9, поршневой полостью гидроцилиндров 1 подъема и опускания платформы и электромагнитным распределителем 6. Последний трубопроводами соединен с торцовыми поверхностями трехпозиционного распределителя 2.
Электромагнит 8 электромагнитного распределителя 6, управляющий подъемом кузова, через кнопки 16 и 17 управления, контакты 20 реле 19 подключен к бортовой электросети автомобиля. Электромагнит 7 электромагнитного распределителя 6, управляющий опусканием кузова, и катушка 21 реле 19 через кнопку 14 управления подключены к бортовой электросети автомобиля, а через выключатель 18 управления электроприводом автосамосвала, диоды 24, кнопку управления 15, датчик положения платформы с ключом 22 с управлением электросхемы и движения автосамосвала.
Гидропривод работает следующим образом.
При движении автосамосвала с опущенной платформой выключатель 18 подает напряжение на один из диодов 24. Электромагниты 7 и 8 обесточены, так как кнопки 16 и 17 разомкнуты, а напряжение с выключателя 18 управления электроприводом и диодов 24 на электромагнит опускания платформы 7 не подается, так как разомкнут ключ датчика положения платформы 22.
Рабочая жидкость от насоса 5 поступает к электромагнитному распределителю 6 и через двухпозиционный распределитель 10 - к гидроусилителю 9 рулевого управления, и через сливную магистраль - в масляный бак 12. От насосов 3 и 4 через трехпозиционный золотниковый распределитель 2 гидрожидкость подается на слив в масляный бак 12.
"Штатный" режим подъема платформы при неподвижном автомобиле: напряжение на электромагнит 8 подъема платформы подается через нажатые кнопки 16 и 17 и нормально замкнутые контакты 20 реле 19.
Две кнопки 16 и 17 на подъем платформы соединены последовательно и образуют логическую схему «И». Напряжение на электромагнит 8 подъема платформы подается только при одновременном включении кнопок 16 и 17. Нажатие на одну любую из этих кнопок напряжения на электромагнит 8 подъема платформы не будет подано и платформа не поднимется. Это исключает так называемый несанкционированный подъем платформы, который может быть выполнен при случайном, непреднамеренном нажатии на кнопку 16, например. Гораздо более реальной бывает ситуация, при которой водитель (оператор), оставаясь «в трезвом здравии», кнопку на подъем платформы не нажимал, но по каким-либо причинам (снижение изоляции из-за старения, попадания воды или агрессивных сред, пожар, короткое замыкание в бортовой электросети), бортовое напряжение попадает на проводку где-то на трассировке между кнопкой 16 и потенциальным выводом обмотки электромагнита 8. В таком случае подъем платформы неизбежен, и это при том, что сопутствующие условия (потоп, пожар, агрессивная среда) вынудят водителя действовать в такой экстремальной ситуации в направлении устранения причины, либо попросту спасать себя. В такой ситуации: поднятая платформа да еще на скорости автомобиля представляет двойную габаритную угрозу и резкое снижение устойчивости автомобиля при движении. Именно поэтому вторая кнопка поднятия платформы включена одним из своих контактов непосредственно к потенциальному (незаземленному) выводу обмотки электромагнита 8.
Естественно, что вторая кнопка 17 не является панацеей и 100% гарантией от несанкционированного подъема платформы, но гарантией значительного снижения вероятности такого подъема она является.
Электромагнит 8 перемещает золотник электромагнитного гидрораспределителя 6 в крайнее левое положение. Гидрожидкость от насоса 5 подается к левой торцевой полости трехпозиционного золотникового распределителя 2 и смещает золотник распределителя в крайнее правое положение. Гидрожидкость от насосов 3 и 4 подается на двухпозиционный гидравлический распределитель 11. Трехходовой двухпозиционный распределитель 11 вместе с кнопками 16 и 17 схемы управления образует логическую схему «И». Если кнопки 16 и 17 нажаты (есть намерение поднять платформу), то для ее подъема еще необходимо нажать педаль «Разрешить поднятие» распределителя 11. При этом гидрожидкость от насосов 3 и 4 подается в поршневые полости гидроцилиндров 1. Подъем осуществляется. Если у водителя есть уверенность, что электрическая схема управления «в порядке», он может нажать педаль распределителя и оставить ее в нажатом положении на защелке. При этом несанкционированный подъем платформы обеспечивается только логической схемой «И» электрической схемы управления.
При достижении в напорной магистрали определенного давления двухпозиционный распределитель 10 перемещается в крайнее правое положение. Гидрожидкость от насоса 5 отключается от гидроусилителя рулевого управления и подключается к напорной гидролинии подъема платформы. Скорость подъема платформы увеличивается.
Гидрожидкость из штоковых полостей гидроцилиндров 1 подъема и опускания платформы вытесняется на слив в масляный бак 12. При отпускании кнопок 16 и 17 электромагнит 8 обесточен. Золотник электрогидравлического распределителя 6 занимает среднее положение, давление гидрожидкости с левой торцевой полости золотника трехпозиционного гидрораспределителя 2 падает и его золотник занимает среднее положение. Поршневая полость гидроцилиндра 1 запирается, фиксируя платформу в поднятом состоянии. Датчик положения платформы 22 включает управляемый ключ.
"Штатный" режим опускания платформы при неподвижном автомобиле: напряжение на электромагнит опускания платформы 7 подается через нажатую кнопку 14. Реле 19 размыкает контакты 20 и исключает включение электромагнита 8. Выключатель 18 разомкнут.
Электромагнит 7 перемещает золотник электромагнитного гидрораспределителя 6 в крайнее правое положение. Гидрожидкость от насоса 5 поступает в правую торцевую полость трехпозиционного гидрораспределителя 2 и смещает его золотник в крайнее левое положение. Штоковые полости гидроцилиндров 1 подъема и опускания платформы соединяются с насосами 3 и 4, а поршневые - со сливом. Происходит принудительное опускание платформы.
Движение автосамосвала с поднятой платформой
Кнопки 13 и 15 разомкнуты. Выключатель 16 управления электроприводом самосвала включен. Автосамосвал движется вперед (при одном положении выключателя 16 управления) или назад (при другом положении). Датчик положения платформы включает (замыкает) ключ 20 и напряжение с выключателя 16 управления электроприводом самосвала через диоды 22 кнопку 14 подается на электромагнит 7 опускания платформы.
Электрическая емкость 23 заряжается до напряжения питания бортовой сети. Платформа начинает опускаться. Как только платформа опускается, датчик положения платформы с ключом 22 разрывает цепь питания электромагнита 7. Если по каким-то причинам необходимо двигаться с поднятой платформой, то необходимо нажать и удерживать кнопку 15, которая разрывает цепь питания электромагнита 7 опускания платформы.
Датчик положения платформы 22 размыкает цепь питания электромагнита 7, когда между платформой и рамой автосамосвала будет определенный зазор. Чтобы разгрузить гидроцилиндры 1 и опустить платформу полностью на раму, к электромагниту 7 параллельно подключена электрическая емкость 23. При размыкании цепи питания электромагнита 7 электрическая емкость 23 поддерживает на нем некоторое время напряжение, достаточное для удержания электромагнита 7 во втянутом состоянии. За это время платформа полностью успевает опуститься на раму самосвала.
Движение автосамосвала
Режим 1
Педаль «Разрешить поднять» гидрораспределителя не нажата и снята с защелки. Платформа автосамосвала ни по каким причинам подниматься не будет. Будь то неисправности в электрической схеме управления, либо маловероятное, но принципиально возможное стечение обстоятельств, при которых случайно нажаты одновременно кнопки подъема 16 и 17. Рабочая жидкость от насосов 3 и 4 поступает в сливной бак 12.
Режим 2
Педаль «Разрешить поднять» гидрораспределителя нажата водителем или находится на защелке. Случайно нажаты кнопки 16 и 17, хотя вероятность такого нажатия при отсутствии желания на то водителя практически равна нулю или близка к нулю. Платформа начинает подниматься. При подъеме платформы датчик положения платформы подключает электромагнит 7 к выключателю управления электропривода 18, а реле 19 отключает электромагнит 8 подъема платформы. В результате этого платформа опускается. Как только платформа опустится, датчик положения платформы отключает электромагнит 7, а реле 19 подключает электромагнит 8. Платформа начинает подниматься и опускаться на некоторую небольшую величину. Электрическая схема управления начинает работать ровно так, как и в прототипе /5/. Т.е. возникает нежелательный колебательный режим с короткими временами отключения усилителя рулевого управления 9. Так как к электромагниту 7 подключена электрическая емкость 23, то время включения электромагнита 7 оказывается значительно больше времени включения электромагнита 8, в результате этого время отключения усилителя рулевого управления оказывается мало и практически не влияет на управляемость автосамосвала при включении платформы на подъем.
Но как бы ни было, время отключения усилителя рулевого управления мало. Это представляет значительную опасность: мало того, что платформа поднимается несанкционированно, да еще и движущийся самосвал на какие-то промежутки времени оказывается фактически без рулевого управления. С точки зрения безопасности движения - это катастрофическая ситуация: негабаритный объект движется без рулевого управления по проезжей части.
Так что двухкаскадное включение логических схем «И» (в электрическую схему управления за счет последовательного включения на подъем платформы двух кнопок 16 и 17; в гидравлическую схему гидравлического распределителя 11 с педалью «Разрешить подъем») полностью исключает возникновение режима колебательного режима с чередующимися подъемами и опусканиями платформы.
Режим 3
Движение самосвала с поднятой платформой. Ситуация полностью под контролем водителя: педаль «Разрешить поднять» гидравлического распределителя 11 нажата, кнопки 16 и 17 на подъем платформы нажаты, кнопка «Запрет опустить» нажата. Ситуация неординарная, почему ее и выполнить непросто (3 кнопки и педаль), но раз уж надо, так пожалуйста следуйте своим курсом с поднятой платформой и думайте ежесекундно чтобы что-либо не отпустить (одну их трех кнопок или педаль). А для этого нужен здравый смысл и трезвый ум, что и требуется по большому счету при выполнении такой ответственной и небезопасной технологии.
Диоды 13 "срезают" ЭДС-самоиндукции, возникающей при выключении электромагнитов 7 и 8, и защищают контакты от электрической эрозии.
Таким образом, предлагаемое техническое решение обеспечивает повышение безопасности движения транспортного средства за счет блокировки несанкционированного подъема платформы.
Источники информации
1. Патент RU 2049937, F15B 11/22 - аналог.
2. Патент RU 2079734, F15В 20/00 - аналог.
3. Патент RU 2138699, F15B 20/00 - аналог.
4. Авторское свидетельство SU 1829271, В60Р 1/16 - аналог.
5. Патент RU 2049690 В60Р 1/16 - прототип
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2049690C1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ | 1989 |
|
SU1829271A1 |
| Объемный гидропривод опрокидывающего механизма и усилителя рулевого управления автомобиля-самосвала | 1988 |
|
SU1512828A1 |
| ГИДРОПРИВОД ТРАНСПОРТНОЙ МАШИНЫ-САМОСВАЛА | 1994 |
|
RU2079734C1 |
| Объединенный гидропривод опрокидывающего механизма и усилителя рулевого управления саморазгружающего транспортного средства | 1990 |
|
SU1729877A1 |
| Объединенный гидропривод опрокидывающего механизма и усилителя рулевого управления автомобиля-самосвала | 1984 |
|
SU1204420A1 |
| Гидропривод затвора гидротехнического сооружения | 1989 |
|
SU1684409A1 |
| Система для автоматического опускания гидравлического подъемного механизма транспортного средства | 2022 |
|
RU2790890C1 |
| Гидравлический привод опрокидывающего механизма автомобиля-самосвала | 1989 |
|
SU1743941A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
Изобретение относится к гидроприводам опрокидывания платформы и поворота управляемых колес большегрузных автомобилей. Гидропривод опрокидывающего механизма транспортного средства содержит гидроцилиндры подъема и опускания платформы, сообщенные с насосами и масляным баком двухпозиционным распределителем с управлением от электромагнитного гидрораспределителя с электрической системой управления. Система управления содержит датчик положения платформы с управляемым ключом, связывающим электромагнит опускания платформы с выключателем управления электроприводом транспортного средства через диоды и реле. Через нормально замкнутые контакты реле включен электромагнит подъема платформы. Катушка реле подключена к электромагниту опускания платформы. Параллельно электромагниту подключена электрическая емкость. В электрической системе управления электромагнитного гидрорпспределителя последовательно с нормально замкнутым контактом реле включена вторая кнопка включения электромагнита подъема платформы. Один из контактов кнопки подключен к потенциальному выводу обмотки электромагнита. Повышается безопасность движения автомобиля. 1 з.п. ф-лы, 2 ил.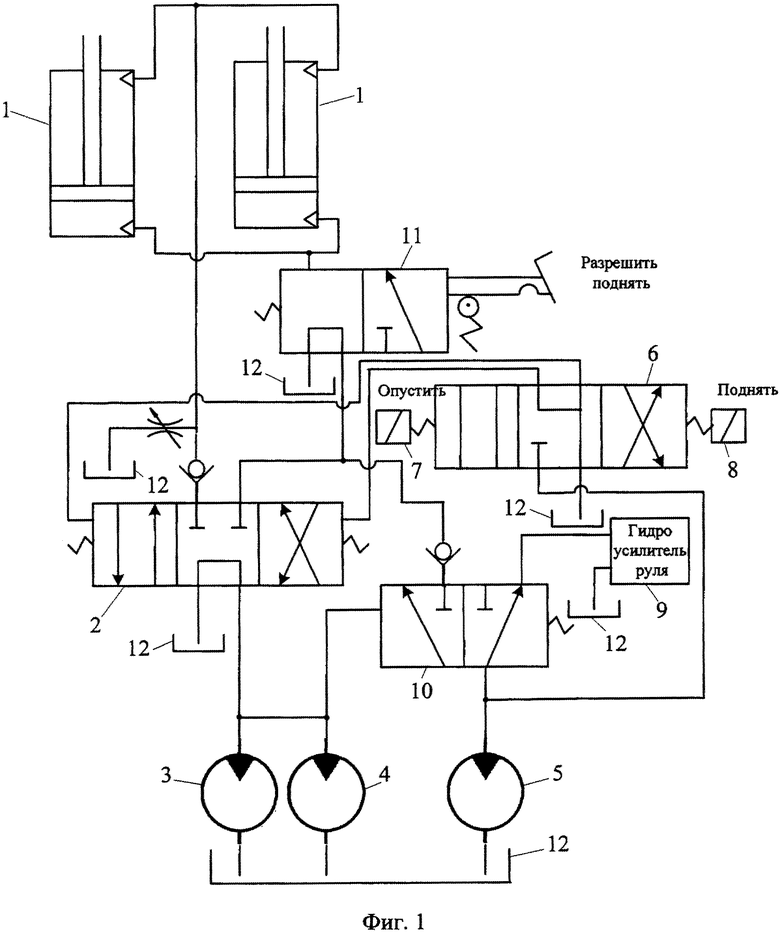
1. Гидропривод опрокидывающего механизма транспортного средства, содержащий гидроцилиндры подъема и опускания платформы, сообщенные с насосами и масляным баком двухпозиционным распределителем с управлением от электромагнитного гидрораспределителя с электрической системой управления, содержащей датчик положения платформы с управляемым ключом, связывающим электромагнит опускания платформы с выключателем управления электроприводом транспортного средства через диоды, реле, через нормально замкнутые контакты которого включен электромагнит подъема платформы, при этом катушка реле подключена к электромагниту опускания платформы, а параллельно электромагниту опускания платформы подключена электрическая емкость, отличающийся тем, что в электрической системе управления электромагнитного гидрораспределителя последовательно с нормально замкнутым контактом реле включена вторая кнопка включения электромагнита подъема платформы, один из контактов которой подключен непосредственно к потенциальному выводу обмотки электромагнита.
2. Гидропривод по п. 1, отличающийся тем, что в цепь сообщения гидроцилиндров подъема и опускания платформы с насосами и масляным баком дополнительно включен трехходовой двухпозиционный распределитель, один из ходов которого соединен с поршневыми полостями гидроцилиндров подъема и опускания платформы.
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2049690C1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ | 1989 |
|
SU1829271A1 |
| ГИДРОПРИВОД ПОДЪЕМНОГО МЕХАНИЗМА | 1998 |
|
RU2138699C1 |
| ГИДРОПРИВОД ТРАНСПОРТНОЙ МАШИНЫ-САМОСВАЛА | 1994 |
|
RU2079734C1 |
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2049937C1 |
| JP 2008285146 A, 27.11.2008 | |||
| US 5255517 A, 26.10.1993. | |||

