Изобретение относится к гидроприводам опрокидывающих механизмов саморазгружающихся транспортных средств с электрической системой управления трансмиссией.
Цель изобретения повышение безопасности движения транспортного средства за счет надежного и быстрого опускания платформы при неисправности гидропривода опрокидывающего механизма и за счет уменьшения времени отключения гидроусилителя рулевого управления.
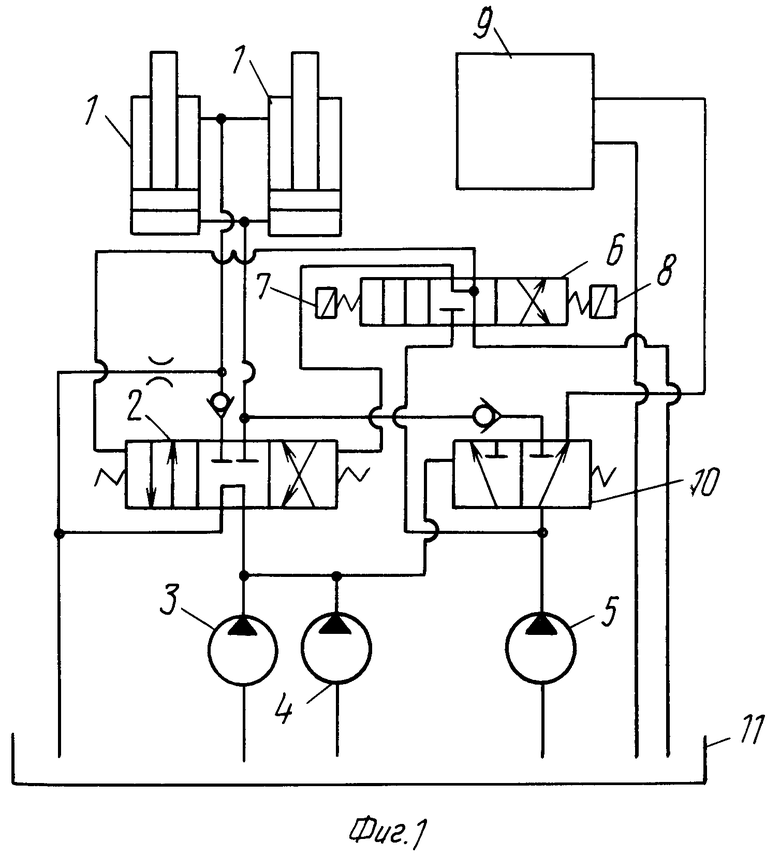
На фиг. 1 изображена схема объединенного гидропривода опрокидывающего механизма и усилителя рулевого управления транспортного средства; на фиг. 2 электрическая схема управления объединенным гидроприводом транспортного средства с электрической трансмиссией.
Гидропривод содержит гидроцилиндры 1 подъема и опускания платформы, трехпозиционный золотниковый распределитель 2, насосы 3-5, электромагнитный распределитель 6 с электромагнитами 7 и 8, гидроусилитель 9 рулевого управления, двухпозиционный распределитель 10 и масляный бак 11.
Электрическая схема управления объединенным гидроприводом содержит электромагнит 7 опускания платформы, электромагнит 8 подъема платформы, диоды 12, кнопки 13-15 управления, выключатель 16 управления электроприводом автосамосвала, реле 17 с нормально замкнутыми контактами 18 и катушкой 19, датчик положения платформы с ключом 20, электрическую емкость 21 и диоды 22.
Насосы 3 и 4 трубопроводами через трехпозиционный золотниковый распределитель 2 соединены с штоковыми и поршневыми полостями гидроцилиндров 1 и со сливом двухпозиционным распределителем 10. Насос 5 трубопроводами соединен через двухпозиционный распределитель 10 с гидроусилителем рулевого управления 9, поршневой полостью гидроцилиндров 1 подъема и опускания платформы и электромагнитным распределителем 6. Последний трубопроводами соединен с торцовыми поверхностями трехпозиционного распределителя 2 и со сливом.
Электромагнит 8 электромагнитного распределителя 6, управляющий подъемом кузова, через кнопку 15 управления, контакты 18 реле 17 подключен к бортовой электросети автомобиля. Электромагнит 7 электромагнитного распределителя 6, управляющий опусканием кузова, и катушка 19 реле 17 через кнопку 13 управления подключены к бортовой электросети автомобиля, а через выключатель 16 управления электроприводом автосамосвала, диоды 22, кнопку управления 14, датчик положения платформы с ключом 20 с управлением электросхемы и движения автосамосвала.
Гидропривод работает следующим образом.
При движении автосамосвала с опущенной платформой выключатель 16 подает напряжение на один из диодов 22. Электромагниты 7 и 8 обесточены, так как кнопка 15 разомкнута, а напряжение с выключателя 16 управления электроприводом и диодов 22 на электромагнит опускания платформы 7 не подается, так как разомкнут ключ датчика положения платформы 20.
Рабочая жидкость от насоса 5 поступает к электромагнитному распределителю 6 и через двухпозиционный распределитель 10 к гидроусилителю 9 рулевого управления и через сливную магистраль в масляный бак 11. От насосов 3 и 4 через трехпозиционный золотниковый распределитель 2 гидрожидкость подается на слив в масляный бак 11.
"Штатный" режим подъема платформы при неподвижном автомобиле: напряжение на электромагнит 8 подъема платформы подается через нажатую кнопку 15 и нормально замкнутые контакты 18 реле 17.
Электромагнит 8 перемещает золотник электромагнитного гидрораспределителя 6 в крайнее левое положение. Гидрожидкость от насосов 3 и 4 подается в поршневые полости гидроцилиндра 1. По достижении в напорной магистрали определенного давления двухпозиционный распределитель 10 перемещается в крайнее правое положение. Гидрожидкость от насоса 5 отключается от гидроусилителя 9 рулевого управления и подключается к напорной гидролинии подъема платформы. Скорость подъема платформы увеличивается. Гидрожидкость из штоковых полостей гидроцилиндров 1 подъема и опускания платформы вытесняется на слив в масляный бак 11. При отпускании кнопки 15 электромагнит 8 обесточен. Золотник электрогидравлического распределителя 6 занимает среднее положение, давление гидрожидкости с левой торцевой полости золотника трехпозиционного гидрораспределителя 2 падает и его золотник занимает среднее положение. Поршневая полость гидроцилиндра 1 запирается, фиксируя платформу в поднятом состоянии. Датчик положения платформы 20 включает управляемый ключ.
"Штатный" режим опускания платформы при неподвижном автомобиле: напряжение на электромагнит опускания платформы 7 подается через нажатую кнопку 13. Реле 17 размыкает контакты 18 и исключает включение электромагнита 8. Выключатель 16 разомкнут.
Электромагнит 7 перемещает золотник электромагнитного гидрораспределителя 6 в крайнее правое положение. Гидрожидкость от насоса 5 поступает в правую торцевую полость трехпозиционного гидрораспределителя 2 и смещает его золотник в крайнее левое положение. Штоковые полости гидроцилиндров 1 подъема и опускания платформы соединяются с насосами 3 и 4, а поршневые со сливом. Происходит принудительное опускание платформы.
Движение автосамосвала с поднятой платформой. Кнопки 13 и 15 разомкнуты. Выключатель 16 управления электроприводом самосвала включен. Автосамосвал движется вперед (при одном положении выключателя 16 управления) или назад (при другом положении). Датчик положения платформы включает (замыкает) ключ 20 и напряжение с выключателя 16 управления электроприводом самосвала через диоды 22 кнопку 14 подается на электромагнит 7 опускания платформы.
Электрическая емкость 21 заряжается до напряжения питания бортовой сети. Платформа начинает опускаться. Как только платформа опускается, датчик положения платформы с ключом 20 разрывает цепь питания электромагнита 7. Если по каким-то причинам необходимо двигаться с поднятой платформой, то необходимо нажать и удерживать кнопку 14, которая разрывает цепь питания электромагнита 7 опускания платформы.
Датчик положения платформы 20 размыкает цепь питания электромагнита 7, когда между платформой и рамой автосамосвала будет определенный зазор. Чтобы разгрузить гидроцилиндры 7 и опустить платформу полностью на раму, к электромагниту 7 параллельно подключена электрическая емкость 21. При размыкании цепи питания электромагнита 7 электрическая емкость 21 поддерживает на нем некоторое время напряжение, достаточное для удержания электромагнита 7 во втянутом состоянии. За это время платформа полностью успевает опуститься на раму самосвала.
Движение автосамосвала, когда по каким-либо причинам платформа начинает подниматься, например, из-за включения кнопки 15. При подъеме платформы датчик положения платформы подключает электромагнит 7 к выключателю управления электропривода 16, а реле 19 отключает электромагнит 8 подъема платформы. В результате этого платформа опускается. Как только платформа опустится, датчик положения платформы отключает электромагнит 7, а реле 19 подключает электромагнит 8. Платформа начинает подниматься и опускаться на некоторую небольшую величину. Так как к электромагниту 7 подключена электрическая емкость 21, то время включения электромагнита 7 оказывается значительно больше времени включения электромагнита 8, в результате этого время отключения усилителя рулевого управления оказывается мало и практически не влияет на управляемость автосамосвала при включении платформы на подъем.
Диоды 12 "срезают" ЭДС-самоиндукции, возникающей при выключении электромагнитов 7 и 8 и защищают контакты от электрической эрозии.
Таким образом, предлагаемое техническое решение обеспечивает опускание платформы при движении автосамосвала при неисправностях объединенного гидропривода, вызвавших самопроизвольный подъем платформы, и уменьшает время отключения усилителя рулевого управления, что снижает возможность возникновения аварийной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ | 1989 |
|
SU1829271A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2605802C2 |
| Объемный гидропривод опрокидывающего механизма и усилителя рулевого управления автомобиля-самосвала | 1988 |
|
SU1512828A1 |
| Объединенный гидропривод опрокидывающего механизма и усилителя рулевого управления саморазгружающего транспортного средства | 1990 |
|
SU1729877A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| Объединенный гидропривод опрокидывающего механизма и усилителя рулевого управления автомобиля-самосвала | 1984 |
|
SU1204420A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ БОЛЬШЕГРУЗНОГО АВТОМОБИЛЯ | 1990 |
|
RU2021156C1 |
| Система автоматической подачи кабеля в рабочий орган самоходного кабелеукладчика | 1988 |
|
SU1717743A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Объединненый гидропривод опрокидывающего механизма и усилителя рулевого управления | 1976 |
|
SU605045A1 |
Изобретение относится к гидроприводам опрокидывания платформы и поворота управляемых колес большегрузных карьерных автомобилей (самосвалов грузоподъемностью от 30 до 180 т и более). Цель изобретения повышение безопасности движения транспортного средства за счет надежного и быстрого опускания платформы при неисправности гидропривода опрокидывающего механизма. Объединенный гидропривод содержит гидроцилиндры подъема, и опускания платформы, трехпозиционный золотниковый распределитель, насосы, электромагнитный гидрораспределитель с электромагнитами 7 8, гидроусилитель рулевого управления, двухпозиционный распределитель, масляной бак. Электрическая схема управления объединенным гидроприводом содержит электромагнит 7 опускания платформы, электромагнит 8 подъема, диоды 12, кнопки 13 15 управления, выключатель 14 управления электроприводом, реле 17 с нормально замкнутыми контактами 18 и катушкой 19, датчик положения платформы с ключом 20, электрическую емкость 21, диоды 22. 1 з. п. ф-лы, 2 ил.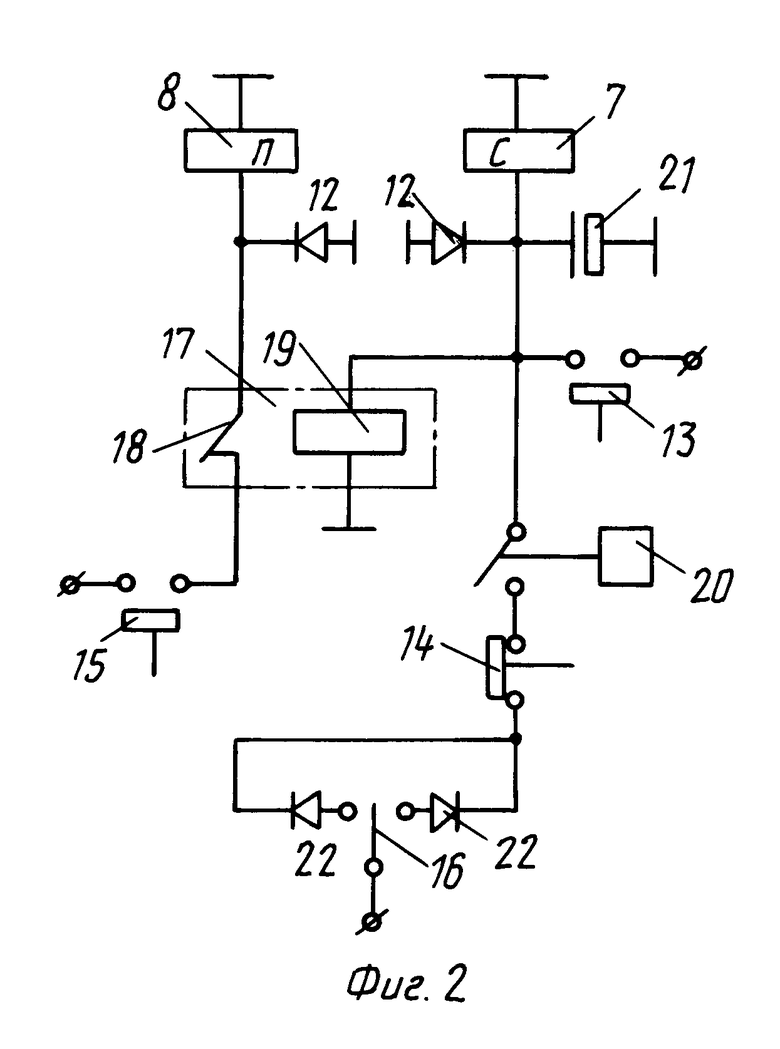
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ | 1989 |
|
SU1829271A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
