Настоящее изобретение относится к автоматической системе, подходящей для снижения скорости вращения одного или нескольких грузов на внешней подвеске, в которой упомянутое вращение предпочтительно возникает под действием канала потока, расположенного предпочтительно ниже по потоку от лопастей вертолета, где прикреплены упомянутые грузы, или по любой другой причине и механическое действие которой основано на использовании по меньшей мере одной аэродинамической поверхности, которая автоматически устанавливается так, чтобы прикладывать, через фактическое взаимодействие с этим каналом потока, аэродинамический момент, относительно центра массы этих подвешенных грузов, надлежащим образом противоположный упомянутой скорости вращения, с тем, чтобы определить замедление, а следовательно, их непрерывную стабилизацию. Автоматизация этого замедления достигается посредством использования цикла автоматического управления, который основан прежде всего на взаимодействии, получаемом с помощью процессора, между элементом, реагирующим на упомянутую скорость вращения, и приводным механизмом, выполненным с возможностью вращения упомянутой аэродинамической поверхности. Упомянутая система может быть особенно полезной в спасательных операциях, выполняемых с помощью вертолета, особенно во время этапов подъема или опускания, соответственно, подвешенного груза, состоящего главным образом из спасателя, носилок и пострадавшего, лежащего на них.
Прежде всего, в отношении настоящей заявки следует отметить, что:
- термин «угловая скорость» не следует понимать в его строгом научном смысле, который тогда может быть связан только с системой из идеально жесткого материала, а в более общем смысле, поскольку ее вектор по меньшей мере одного компонента по меньшей мере частично зависит, математически и/или физически, от вращающейся части группового движения системы точечных масс, причем упомянутая вращающаяся часть состоит из вращения вокруг по меньшей мере одной оси, которая также может изменяться во времени. Фактически, по причинам деформации конструкции и/или из-за возможных относительных перемещений между различными частями подвешенного груза, подлежащего стабилизации, предположение об идеальной жесткости этого подвешенного груза практически никогда не выполняется;
- термин «вектор» означает, как известно, математический объект, содержащий один или более компонентов, которые могут быть физическими величинами;
- каждый символ, имеющий отношение к вектору, в подробном описании будет обозначаться подчеркнутой буквой, также следует понимать, в этом случае, что этот вектор может состоять из одного компонента, а следовательно, может быть простой скалярной величиной или вектором с одним компонентом;
- термин «момент» указывает на физическое действие, предполагающее придание вращения, или в любом случае обеспечение изменения относительного углового момента и/или угловой скорости системы точечных масс, и который математически и на размерном уровне это представляет собой результат умножения силы на смещение, так что этот момент также может указывать на вращающий момент в чистом виде, инициированный системой без какой-либо результирующей силы;
- термин «груз» или «подвешенный груз» предназначен для обозначения комбинации носилок и всего того, что некоторым образом вынуждено перемещаться вместе с ними, а также спасателя и/или потерпевшего, так же как измерительных приборов, составляющих систему стабилизации, хотя следующие физико-математические понятия все еще применяются, в том числе в случае, в котором в качестве подвешенного груза рассматривают только носилки или другой груз любого вида;
- в любом случае, по отношению к объекту, на защиту которого направлена эта заявка, и в частности, содержание формулы изобретения, этот термин «груз» или «подвешенный груз» также может идентифицировать любую систему точечных масс, по меньшей мере частично сбалансированную по меньшей мере с помощью одного средства, пригодного для этой цели, в направлении действия силы гравитации, тогда упомянутая система точечных масс, возможно, может состоять из нескольких инородных тел.
При более подробном исследовании случая, в котором подвешенные грузы прикреплены к вертолету, например, с помощью железного троса, соединенного с соответствующей лебедкой, или возможно, с барицентрическим крюком, следует помнить, что для создания необходимой подъемной силы диск лопастей вертолета передает набегающему потоку, поступающему непосредственно на диск, определенные колебания скорости, из-за которых, по меньшей мере ниже по потоку от упомянутых лопастей, формируется своего рода канал потока, направленный вниз. Следовательно, любая масса, оказывающаяся в этом канале потока, подвергается физическому воздействию, возникающему вследствие определенного распределения аэродинамических нагрузок по ее поверхности, которая поэтому может изменять действие перемещения относительно по меньшей мере ее части.
В частности, это часто происходит во время этапа подъема и/или опускания в вертолетных операциях, во время которых подвешенный груз, который состоит, например, но не исключительно, из носилок, пострадавшего и спасателя, подвергается, под воздействием этого канала потока, по меньшей мере одному движению вращения, примерно вокруг поддерживающего железного троса, и которое может быть охарактеризовано посредством скорости вращения или угловой скорости, даже очень интенсивной. Упомянутое вращение может вызывать физиологическую декомпенсацию спасателя и/или пострадавшего из-за центробежной силы, которая создается внутри его тела.
Фактически, человек некоторым образом вынужден следовать за вращением носилок, и, например, при расположении в радиальном направлении относительно этого вращения, подвергаться, как известно, перемещению крови в направлении голова-ноги или наоборот, которое может быть потенциальной причиной даже очень опасной сердечной декомпенсации.
Таким образом, были проведены исследования на некоторых системах, способных обеспечивать возможность спасателю избегать этого возможного недостатка, посредством которых достигается возможность снижения угловой скорости подвешенного груза, в этом случае создаваемой носилками и всем, что по меньшей мере частично вынуждено вращаться вместе с ними.
Один из них состоит из устройства, описанного в заявке на патент FR 2922437, которое включает в себя использование извлекаемого щитка, предпочтительно из пластика, способного создавать, благодаря аэродинамическому эффекту, момент, предназначенный для вращения носилок в обратном направлении по сравнению с вращением, индуцированным каналом потока, который формируется лопастями вертолета, в дальнейшем называемым просто «канал потока». Спасатель, с этой целью, может регулировать наклон и ориентацию этого щитка в соответствии с направлением и путевым углом скорости потока воздуха относительно него, чтобы аэродинамическая сила формировалась таким образом, чтобы, например, замедлять угловое движение носилок.
Еще одна система, представленная в патентной заявке WO 2008/131081, заключается в использовании паруса, прикрепленного к носилкам так, чтобы его можно было вытягивать вверх или вниз, и обеспеченного соответствующим отверстием переменного сечения, которое собирает определенную часть потока воздуха, чтобы создавать, снова благодаря аэродинамическому эффекту, момент, действующий на подвешенный груз.
Однако такие системы требуют для работы внешнего вмешательства спасателя, которое не дает возможности, таким образом, уделять достаточное внимание другим операциям, в частности непосредственной помощи пострадавшему.
Поэтому целью настоящего изобретения является обеспечение автоматической системы стабилизации по меньшей мере одного подвешенного груза, предпочтительно для проведения спасательных операций с помощью вертолета, которое не требует какого-либо вмешательства со стороны спасателя, так что последний может уделять должное внимание медицинской помощи пострадавшему, даже во время этапа подъема к вертолету и/или спуска с него.
Другая широко распространенная система предусматривает присутствие на земле дополнительного человека, обеспеченного другим тросом, причем этот трос также соединен с носилками. Во время подъема носилок, несущих спасателя и пострадавшего, человек с тросом должен пытаться замедлять угловое движение носилок, прикладывая тяговое усилие в соответствующем направлении к упомянутому тросу.
Эта система действительно позволяет избегать вмешательства спасателя, но ее может быть не легко использовать, когда пострадавший находится в неприступных или труднодоступных областях, таких, например, как ущелья или расщелины, или в областях, так или иначе чрезвычайно крутых, таких как области, не имеющие беспрепятственной или удобной опоры для человека, который должен управлять тросом для стабилизации.
Поэтому другой целью настоящего изобретения является обеспечение автоматической системы стабилизации по меньшей мере одного подвешенного груза, предпочтительно для проведения спасательных операций с помощью вертолета, которую также можно легко использовать для спасательной операции в труднодоступных областях, таких как ущелья или расщелины, и которая, следовательно, по меньшей мере для целей работы, непосредственно предназначенной для упомянутой стабилизации, не требует вмешательства какого-либо человека.
Кроме того, полезность описанных систем в любом случае зависит от квалификации и интуиции человека, который управляет системой стабилизации, так что такие операции по стабилизации подвержены возможным ошибкам, связанным с человеческим фактором.
Поэтому еще одной целью настоящего изобретения является обеспечение системы стабилизации по меньшей мере одного подвешенного груза, предпочтительно для проведения спасательных операций с помощью вертолета, которой можно управлять автоматически таким образом, чтобы иметь возможность снизить риск возникновения возможных ошибок, связанных с человеческим фактором, которые могут влиять на успех операции стабилизации, а следовательно также, по меньшей мере частично, спасательной операции.
Еще одним устройством, нацеленным на снижение угловой скорости подвешенного груза, является устройство, описанное в японской патентной заявке JPH08113466, которое обеспечивает упомянутое уменьшение посредством нагнетательных устройств, закрепленных на упомянутом подвешенном грузе, и которое прикладывает к нему вращающий момент, зависящий от результата измерений гироскопа. Однако упомянутые устройства требуют питания от самой системы для функционирования и упомянутое питание может быть слишком дорогостоящим.
Помимо этого следует отметить, что с устройством, описанным в упомянутой заявке, невозможно избегать взаимных помех между работой компонентов, направленных на уменьшение угловой скорости подвешенного груза, и каналом потока, расположенным ниже по потоку от вертолета, по той причине, что нагнетательные устройства не извлекают преимущество из энергии самого канала потока, а должны создавать свои собственные каналы потоков, чтобы функционировать. Фактически, каждое нагнетательное устройство, описанное в упомянутой заявке, предназначено для того, чтобы создавать силу в направлении продольной оси того же самого нагнетательного устройства, потому что последнее предназначено для работы, как это уже известно, например, пропеллера, в идеальной области потока, совпадающей с тем же продольным направлением; поэтому очевидно, что при использовании системы, представленной в этой заявке, канал потока или область потока, расположенная ниже по потоку от вертолета, неизбежно вызовут наклон между продольной осью нагнетательного устройства и направлением области потока, в которой функционирует это нагнетательное устройство, так что эффективность его, а также всей системы значительно снижается, по той причине, что момент или вращающий момент, действующий на подвешенный груз, происходит именно от сил, произведенных упомянутыми нагнетательными устройствами.
Следовательно, можно сказать, что, с системой, описанной в этой заявке, канал потока, получаемый от вертолета, создает взаимные помехи с рабочей зоной каждого нагнетательного устройства, так что включает в себя негативное влияние на работу всей системы. Помимо этого, чем больше подвешенный груз приближается к вертолету, тем сильнее становятся упомянутые помехи.
Поэтому еще одной целью настоящего изобретения является обеспечение системы стабилизации по меньшей мере одного подвешенного груза, предпочтительно для операций спасения с помощью вертолета, которая требует меньшего количества энергии для работы по отношению к уже известным устройствам и имеет лучшую эффективность, также когда подвешенный груз приближается к вертолету.
Эти цели достигаются с помощью автоматической системы стабилизации, благодаря которой, на основании по меньшей мере величины по меньшей мере части по меньшей мере одного компонента угловой скорости подвешенного груза, прикрепленного к вертолету, упомянутой величины, обнаруживаемой по меньшей мере одним датчиком угловой скорости, автоматически создается физическое воздействие посредством взаимодействия между аэродинамическим средством и каналом потока, расположенным ниже по потоку от лопастей упомянутого вертолета, и посредством по меньшей мере одного процессора, при этом упомянутое воздействие является моментом или вращающим моментом, стремящимся стабилизировать и уменьшить скорость вращения упомянутого подвешенного груза.
Эта система стабилизации состоит главным образом из следующих компонентов:
- по меньшей мере одного датчика угловой скорости, в дальнейшем упоминаемого как «первичный датчик», который состоит по меньшей мере из одного элемента, чувствительного по меньшей мере к части по меньшей мере одного компонента вектора угловой скорости по меньшей мере части подвешенного груза;
- по меньшей мере одного программного обеспечения или компьютерной программы, которая координирует различные компоненты;
- по меньшей мере одного блока или средства обработки, по меньшей мере частично электрического и/или электронного и/или компьютера или процессора, которое можно рассматривать как либо аппаратное оборудование, либо процессор, либо микропроцессор, либо подобное устройство, на котором упомянутое программное обеспечение по меньшей мере частично установлено и которое поэтому обеспечивает возможность выполнения такого программного обеспечения, или функционирования, по меньшей мере частично;
- упомянутого средства обработки, именуемого в дальнейшем просто как «процессор», пригодного для цифровой обработки сигналов;
- по меньшей мере одного аэродинамического средства, предназначенного в качестве средства, способного создавать, если подвергается воздействию потока текучей среды, аэродинамическую силу, возникающую вследствие определенного распределения аэродинамических нагрузок на самом аэродинамическом средстве, при этом упомянутые нагрузки таким образом также приводят к возникновению вектора момента или вращающего момента относительно какой-либо точки пространства;
- при этом упомянутое аэродинамическое средство по меньшей мере частично закреплено на упомянутом подвешенном грузе по меньшей мере с помощью одного известного средства;
- по меньшей мере одной системы перемещения, в том смысле, что система обеспечивает возможность перемещения по меньшей мере одной системы точечных масс, и по меньшей мере частично при помощи искусственного источника энергии, такого, например, как гидравлический, электрический или пневматический, или во всяком случае не являющегося человеком;
- в некоторых случаях по меньшей мере одного другого датчика, в дальнейшем упоминаемого как «вторичный», который состоит по меньшей мере из одного элемента, чувствительного по меньшей мере к части по меньшей мере одного компонента физической величины, которая может быть векторной;
- причем последняя физическая величина по меньшей мере частично зависит физически и/или математически по меньшей мере от одного физического события в отношении по меньшей мере части упомянутого аэродинамического средства;
- при этом последняя физическая величина, предпочтительно, математически и/или физически по меньшей мере частично зависит от наклона и/или ориентации вектора скорости относительно по меньшей мере части воздуха, воздействующей по меньшей мере частично на упомянутое аэродинамическое средство, при этом упомянутый наклон и/или ориентация определяется относительно опорного направления, составляющего одно целое по меньшей мере с частью последнего;
- по меньшей мере одного устройства преобразования, связанного по меньшей мере с одним из упомянутых первичного и, если присутствует, вторичного датчиков, способного преобразовывать по меньшей мере одну физическую величину, обнаруживаемую или выявляемую этим первичным или вторичным датчиком, по меньшей мере в один соответствующий электрический и/или электронный сигнал, так что комбинация по меньшей мере одного из упомянутых датчиков с упомянутым устройством преобразования представляет собой, соответственно, первичный или вторичный преобразователь;
- по меньшей мере один из упомянутых первичного и вторичного преобразователей по меньшей мере частично закреплен на упомянутом подвешенном грузе по меньшей мере с помощью одного известного средства;
- по меньшей мере одного средства связи, по меньшей мере частично электрического и/или электронного и/или компьютерного, в том смысле, что это подходящее средство обеспечения взаимного сопряжения или взаимодействия, в смысле обмена информацией или сигналами, предпочтительно электрическое и/или электронное и/или компьютерное, после возможного аналого-цифрового преобразования или наоборот, по меньшей мере одной из следующих пар компонентов:
- упомянутого процессора и первичного преобразователя;
- упомянутого процессора и вторичного преобразователя, если последний присутствует;
- упомянутого процессора и системы перемещения.
Предпочтительно, но не исключительно, предпочтительный вариант осуществления настоящего изобретения предусматривает, что:
- упомянутое аэродинамическое средство состоит по меньшей мере частично по меньшей мере из одной аэродинамической поверхности или крыла, отличающегося по меньшей мере частично определенным аэродинамическим профилем, предпочтительно двояковыпуклым и симметричным; это аэродинамическое средство может быть образовано, также, по меньшей мере воздушным винтом с неизменяемым или изменяемым шагом, вращающимся, возможно, посредством по меньшей мере одного двигателя известного источника энергии;
- упомянутая система перемещения представляет собой приводной механизм или двигатель с известным источником энергии, по меньшей мере частично закрепленным на упомянутом крыле;
- упомянутый двигатель имеет возможность перемещать упомянутое крыло, предпочтительно поворачивая его, посредством по меньшей мере одного элемента, который может быть валом, в дальнейшем упоминаемым как «вал двигателя»;
- упомянутый элемент по меньшей мере частично закреплен по меньшей мере на одном конструктивном элементе относительно упомянутого крыла и/или по меньшей мере частично закреплен на нем;
- упомянутый конструктивный элемент, в дальнейшем упоминаемый как «вал крыла», предпочтительно является удлиненным и по меньшей мере частично находится внутри упомянутого крыла;
- упомянутое программное обеспечение функционирует по меньшей мере частично по меньшей мере с помощью одного языка программирования;
- упомянутый первичный датчик представляет собой гироскоп или подобное устройство, по меньшей мере частично закрепленное на упомянутом подвешенном грузе;
- упомянутый вторичный датчик представляет собой акселерометр или подобное устройство, по меньшей мере частично закрепленное на упомянутом подвешенном грузе;
- упомянутое средство связи состоит по меньшей мере из какого-либо аналого-цифрового или цифроаналогового преобразователя, или подобного устройства.
Кроме того, термин «процессор» предназначен для идентификации, ради простоты, набора из компьютерной программы или программного обеспечения, которое обеспечивает возможность устройству функционировать, и средства обработки, на котором упомянутое программное обеспечение установлено.
Предпочтительно, но не исключительно, предпочтительный вариант осуществления настоящего изобретения функционирует в соответствии с процедурой, которая выполняет, предпочтительно циклически и/или многократно, по меньшей мере один из следующих этап, которые могут быть по меньшей мере частично одновременными:
- первичный преобразователь обнаруживает, а в дальнейшем выявляет, по меньшей мере часть по меньшей мере одного компонента вектора угловой скорости по меньшей мере части подвешенного груза;
- последний компонент, предпочтительно относящийся к оси, является общим по меньшей мере частично и для упомянутого первичного преобразователя, и для упомянутого подвешенного груза;
- если присутствует, вторичный преобразователь обнаруживает и затем выявляет по меньшей мере часть по меньшей мере одного компонента физической величины, возможно, векторную, и по меньшей мере частично зависящую физически и/или математически по меньшей мере от одного физического события в отношении по меньшей мере части упомянутого аэродинамического средства;
- по меньшей мере часть выявления упомянутого первичного преобразователя, возможно, преобразованная по меньшей мере в один сигнал, предпочтительно аналоговый, электрический и/или электронный, посылается в процессор в качестве первичного входного сигнала;
- по меньшей мере часть выявления упомянутого вторичного преобразователя, возможно, преобразованная по меньшей мере в один сигнал, предпочтительно аналоговый, электрический и/или электронный, посылается в процессор в качестве вторичного входного сигнала;
- по меньшей мере часть по меньшей мере одного из этих входных сигналов в некоторых случаях преобразуется в цифровую форму, посредством по меньшей мере одного аналого-цифрового преобразователя;
- процессор обрабатывает, по меньшей мере математически и/или логически, по меньшей мере часть по меньшей мере одного из этих входных сигналов;
- процессор, следовательно, на основании по меньшей мере части по меньшей мере одного из упомянутых входных сигналов, посылает по меньшей мере один выходной сигнал, который может быть в цифровой форме, в систему перемещения;
- по меньшей мере часть этого выходного сигнала в некоторых случаях преобразуется в аналоговую форму, посредством по меньшей мере одного цифроаналогового преобразователя;
- на основании по меньшей мере части этого выходного сигнала упомянутое средство для перемещения перемещает, по отношению по меньшей мере к одному потоку воздуха, по меньшей мере часть аэродинамического средства, предпочтительно по меньшей мере поворачивая его;
- создается изменение по меньшей мере части аэродинамических нагрузок, действующих на упомянутое аэродинамическое средство, вследствие его перемещения, сообщаемого упомянутой системой перемещения;
- по меньшей мере часть упомянутых аэродинамических нагрузок, в результате по меньшей мере этого изменения, прикладывает, в целом, по меньшей мере один момент к подвешенному грузу, например, относительно центра массы последнего;
- упомянутый момент определяет по меньшей мере одно изменение, которое предпочтительно состоит из уменьшения, абсолютной величины по меньшей мере одного компонента вектора угловой скорости относительно по меньшей мере части этого подвешенного груза, последний компонент предпочтительно по меньшей мере частично связан, физически и/или математически, по меньшей мере с компонентом угловой скорости, изначально обнаруживаемым первичным преобразователем.
Упомянутый процесс, предпочтительно многократно и/или циклически, также может выполнять все эти этапы, предпочтительно по меньшей мере частично в представленной последовательности, или по меньшей мере два из этих этапов, предпочтительно по меньшей мере частично в представленной последовательности, при этом упомянутые два этапа также могут быть разделены по меньшей мере другим этапом, в последней последовательности, причем последний другой этап в упомянутом способе также может отсутствовать. Следует учитывать, что, предпочтительно, этапы измерения преобразователей, если присутствуют оба, и отправки соответствующих сигналов для ввода в процессор выполняются по меньшей мере частично одновременно.
Как будет пояснено в примере подробного описания, процессор, предпочтительно, но не исключительно, использует выявление вторичного датчика для определения, по меньшей мере приблизительно, по меньшей мере направления по меньшей мере части по меньшей мере одного компонента вектора скорости по меньшей мере части потока воздуха, которая воздействует по меньшей мере частично на упомянутое аэродинамическое средство.
Однако для этой процедуры использования желательно включать все упомянутые выше этапы и в представленной последовательности.
Поэтому настоящее устройство функционирует таким образом, что обнаружение угловой скорости первичным преобразователем, соответствующей вращательному движению подвешенного груза в определенном направлении, соответствует средству перемещения, которое выполняет аэродинамическое средство таким образом, что последнее претерпевает изменение относительно аэродинамических нагрузок, действующих на это аэродинамическое средство, так что вектор перемещения, прикладываемый теми же нагрузками, и возникающие вследствие этого изменения, относительно центра массы упомянутого подвешенного груза, имеют соответствующий модуль, направление и значение и, например, замедляют это угловое движение. Поэтому, в самом общем смысле, если груз вращается в направлении против часовой стрелки, относительно некоторого наблюдателя, аэродинамическое средство необходимо расположить таким образом, чтобы аэродинамические нагрузки, которые являются результатом контакта его с воздухом, могли прикладывать момент по часовой стрелке к подвешенному грузу, который, следовательно, подвергается значительному замедлению относительного вращательного движения.
Другой аспект настоящего изобретения заключается в том, что его также можно рассматривать как систему управления с обратной связью, предназначенную для стабилизации при вращении по меньшей мере одного подвешенного груза, и в частности, предпочтительно, но не исключительно, носилок со спасателем и пострадавшим, во время проведения спасательных операций с помощью вертолета. Фактически, величина угловой скорости представляет собой элемент набора данных на выходе из физической системы, которой управляют, представленной этим подвешенного груза, например, соответствующей в действительности в целом носилкам со всем, что некоторым образом по меньшей мере частично вынуждено перемещаться вместе с ними, и в свою очередь используется как элемент набора данных для ввода в процессор, который является контроллером.
Последний, также возможно на основании входного сигнала, поступающего от вторичного преобразователя, посылает выходной сигнал в систему перемещения, которая, на основании этого выходного сигнала, модифицирует расположение аэродинамического средства относительно потока воздуха таким образом, чтобы произвести соответствующее изменение вектора момента, прикладываемого упомянутым аэродинамическим средством, относительно центра массы подвешенного груза. Эта угловая скорость, непосредственно в качестве следствия последнего изменения, может измениться относительно величины, ранее измеренной первичным преобразователем, который выявит новую величину, перезапуская цикл и замыкая контур управления.
С возможностью установления, что переменная, измеренная на выходе, то есть угловая скорость, также зависит от управляющей переменной на входе, которая является физическим воздействием, прикладываемым системой перемещения к подвешенному грузу, настоящее изобретение можно рассматривать, по меньшей мере частично, как систему управления с обратной связью. Фактически, первичный преобразователь, предпочтительно, но не исключительно, всегда измеряет компонент угловой скорости вдоль определенной оси, которая, по меньшей мере приблизительно, предпочтительно остается фиксированной по отношению по меньшей мере к части подвешенного груза.
Признаки настоящего изобретения и способ, с помощью которого оно может функционировать, станут более ясными из нижеследующего подробного описания, в котором первая часть представляет собой математическое логическое объяснение возможного способа использования предпочтительного варианта осуществления настоящего изобретения, в дальнейшем просто упоминаемого как «предпочтительный вариант осуществления», а остающаяся часть представляет одно из его возможных механических функционирований, а также взаимное расположение некоторых компонентов. Это описание в любом случае дано в качестве не ограничивающего примера более общих заявленных концепций.
Описание приведено со ссылкой на прилагаемые чертежи, на которых:
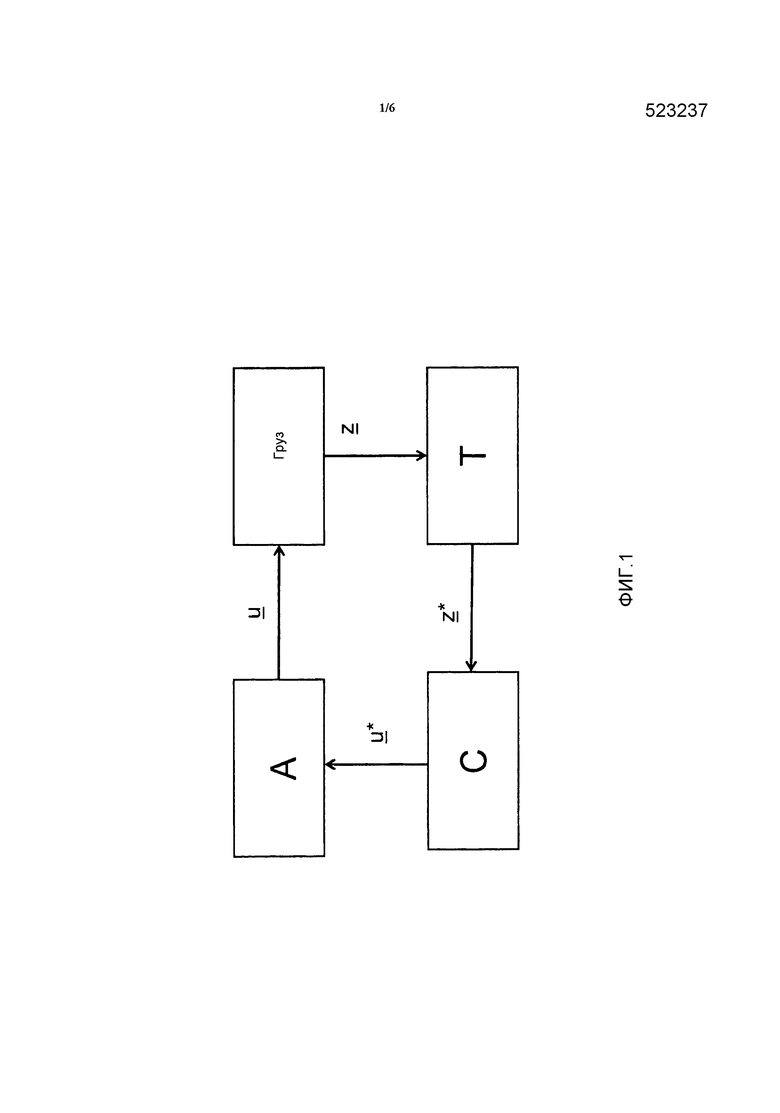
- фиг. 1 представляет схему контура управления, при помощи которого может функционировать предпочтительный вариант осуществления представленного устройства;
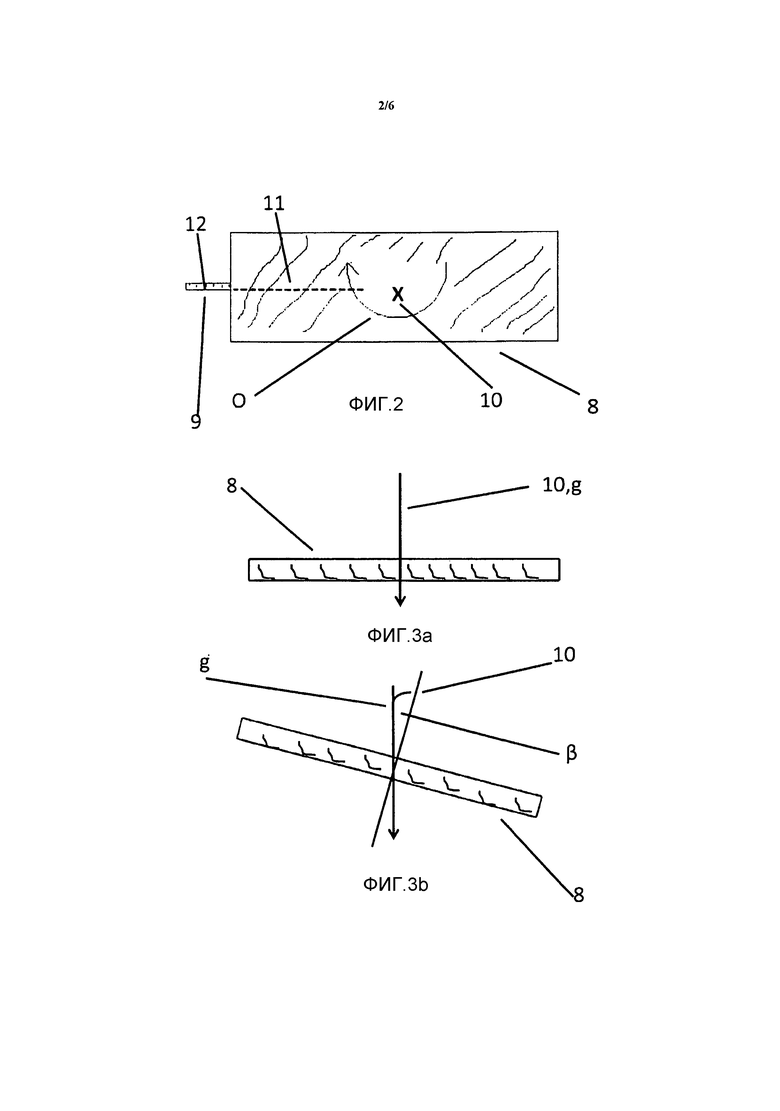
- фиг. 2 представляет перпендикулярный вид сверху вращения носилок вместе с крылом для стабилизации;
- фиг. 3a и 3b представляют два вида сбоку только носилок в двух разных физических ситуациях, соответственно, при этом каждый может быть соотнесен с видом на фиг. 2;
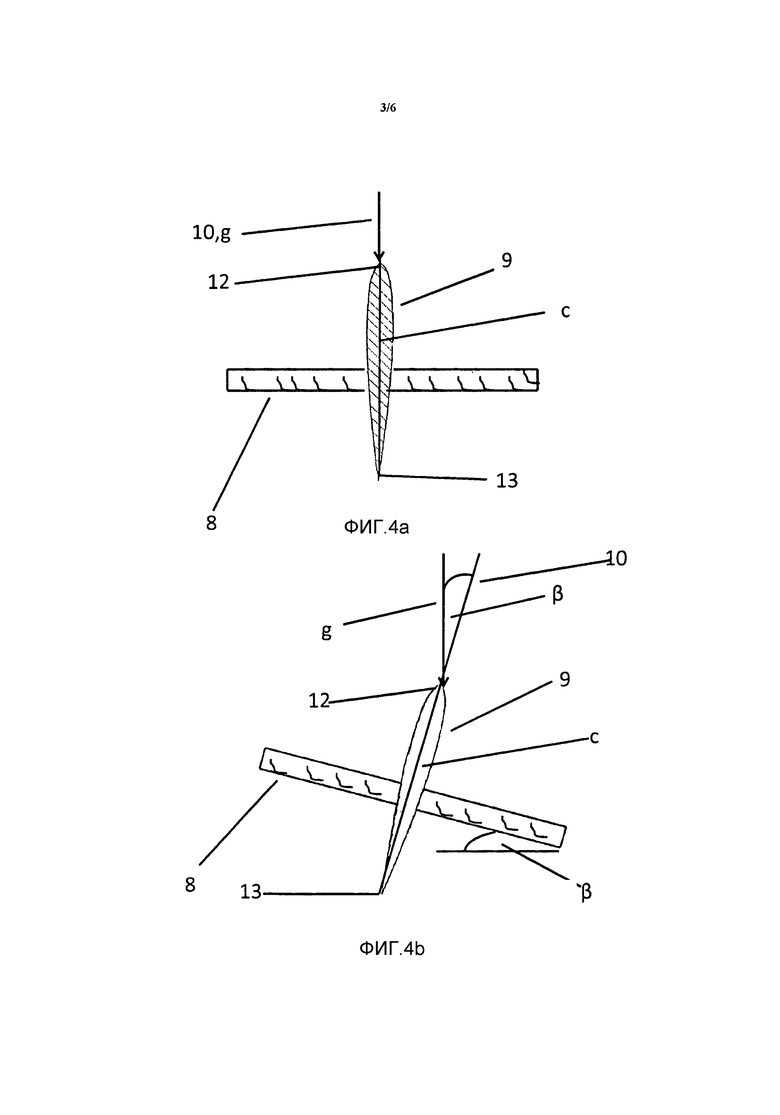
- фиг. 4a и 4b эквивалентны, соответственно, фиг. 3a и 3b, однако также иллюстрируют крыло;
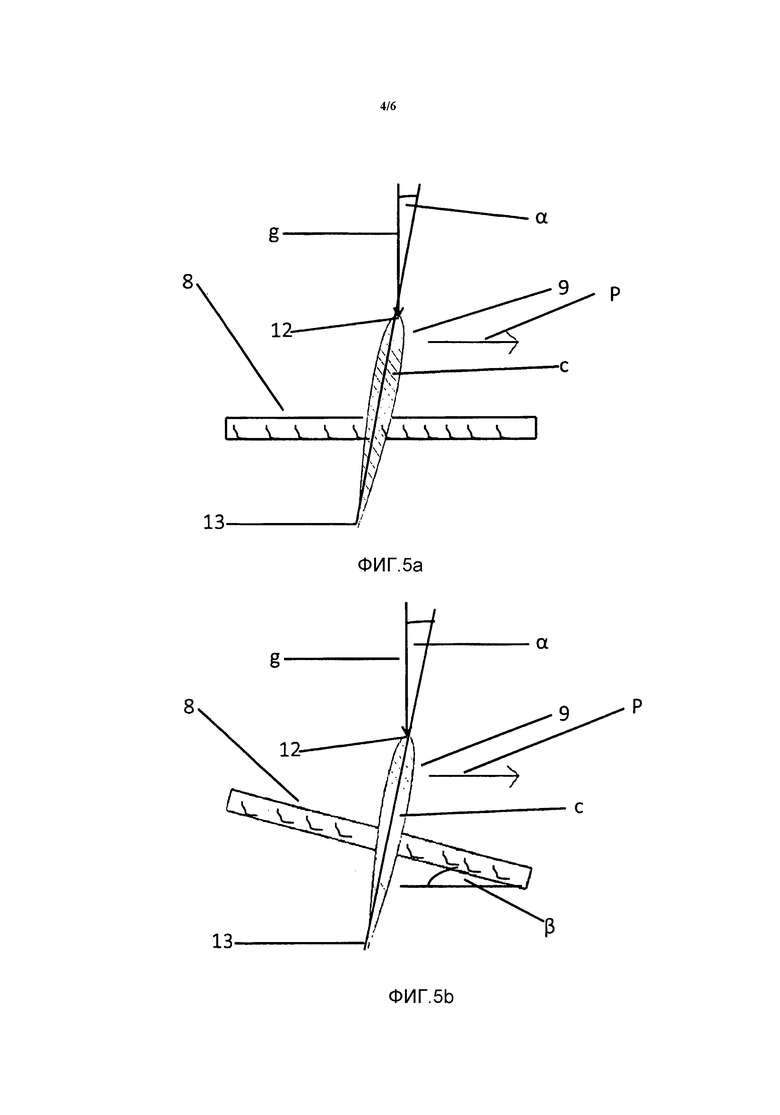
- фиг. 5a и 5b представляют два вида сбоку носилок вместе с крылом, причем последнее с модифицированным углом атаки, соответственно, по сравнению с ситуациями, показанными на фиг. 4a и 4b, в соответствии с указаниями системы стабилизации;
- фиг. 5c представляет вид сбоку носилок вместе с крылом, причем последнее с углом атаки, модифицируемым относительно ситуации, показанной на фиг. 4b, однако в этом случае без вторичного преобразователя;
- фиг. 6 показывает вид, ориентированный подобно виду на фиг. 2, при этом каждый показывает физическое воздействие упомянутой системы стабилизации;
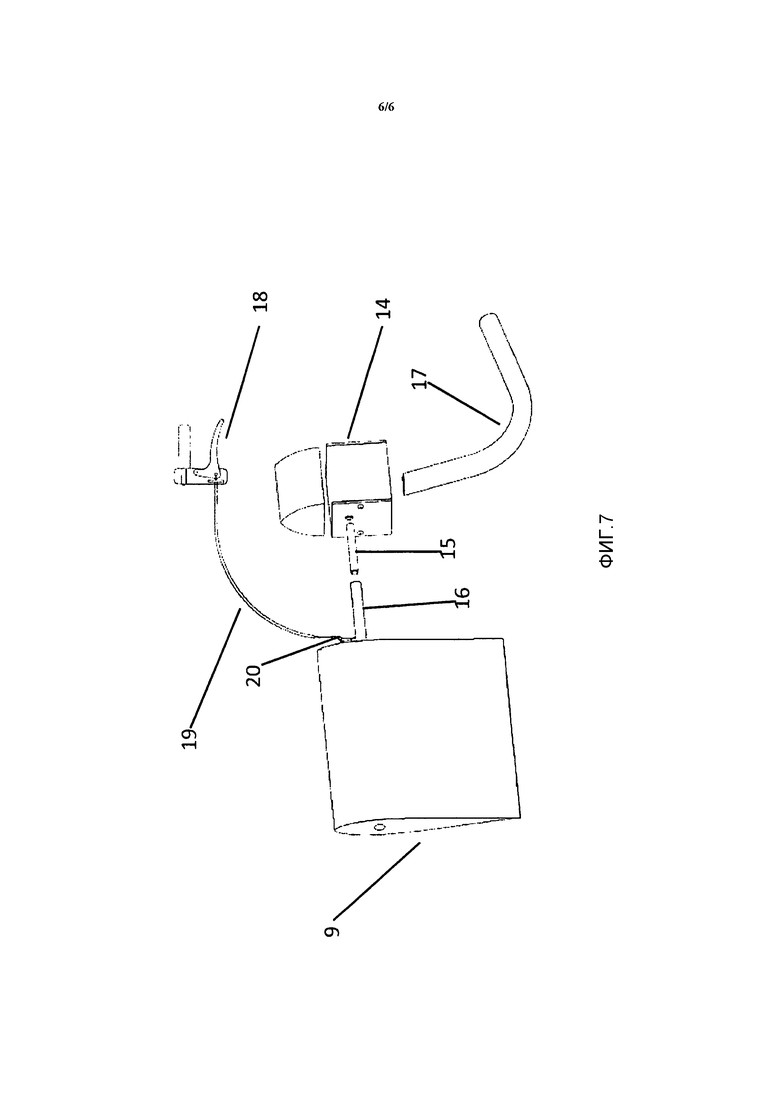
- фиг. 7 показывает вид с пространственным разделением главных конструкционных компонентов системы стабилизации.
Фиг. 1 показывает возможную блок-схему относительно системы управления с обратной связью, с помощью которой можно интерпретировать возможный способ использования предпочтительного варианта осуществления представленного устройства.
Со ссылками на фиг. 1 следует отметить, что:
- блок «груз» содержит по меньшей мере подвешенный груз, следовательно, также саму систему стабилизации;
- блок T «преобразователь» может содержать либо по меньшей мере первичный преобразователь, либо по меньшей мере первичный и вторичный преобразователи, либо по меньшей мере один единый преобразователь, который выполняет функции обоих;
- блок C «контроллер» содержит по меньшей мере процессор;
- блок A «приводной механизм» содержит по меньшей мере систему перемещения;
- z обозначает вектор выходных сигналов результатов измерения, содержащих по меньшей мере один компонент по меньшей мере одной физической величины, относящейся по меньшей мере к части подвешенного груза;
- z, по меньшей мере в смысле математической логики, выходит из нагрузки и входит в блок T;
- блок T переводит вектор выходных сигналов z измерения, по меньшей мере в смысле математической логики, в вектор z*, который содержит по меньшей мере один сигнал, предпочтительно электрический и аналоговый, и по меньшей мере частично зависит по меньшей мере от одного компонента z;
- T посылает, по меньшей мере в логическом смысле, упомянутый вектор z* в блок C;
- следовательно, упомянутый вектор z* представляет собой вектор сигналов на входе, и поэтому берется на входе, по меньшей мере одним известным средством, от C, после возможного преобразования из аналоговой формы в цифровую форму, посредством по меньшей мере одного аналого-цифрового преобразователя;
- C обрабатывает этот вектор сигналов на входе z*, выполняя по меньшей мере одну логическую и/или математическую операцию, чтобы получить вектор u*, который содержит по меньшей мере один предпочтительно цифровой сигнал;
- C посылает вектор u*, по меньшей мере в логическом смысле, в блок A, который содержит по меньшей мере систему перемещения;
- следовательно, упомянутый вектор u* представляет собой вектор сигналов на выходе из C, и поэтому берется на входе A, после возможного преобразования из цифровой формы в аналоговую форму, посредством по меньшей мере одного цифроаналогового преобразователя;
- блок A, по меньшей мере в смысле математической логики, переводит вектор сигналов на выходе u* в вектор входных сигналов u, который содержит по меньшей мере одно физическое воздействие, по меньшей мере частично зависящее по меньшей мере от одного компонента u*;
- поэтому А оказывает это физическое воздействие в соответствии с вектором u, по меньшей мере на часть аэродинамического средства, которую можно рассматривать как часть подвешенного груза;
- эта последняя часть, путем перемещения, изменяет расположение и/или ориентацию относительно потока воздуха, например, фактически в зависимости от канала потока;
- по меньшей мере одна физическая величина по отношению к вектору z, в общем, изменяется, также как следствие этого изменения в расположении и/или ориентации упомянутой по меньшей мере части аэродинамического средства;
- блок T выполняет новые измерения и перезапуски цикла.
Один из возможных способов использования предпочтительного варианта осуществления предусматривает, что:
- упомянутый вектор измерений z содержит по меньшей мере:
- по меньшей мере часть по меньшей мере одного компонента вектора, которая по меньшей мере частично зависит, математически и/или физически, по меньшей мере от одного компонента вектора угловой скорости по меньшей мере одной точки упомянутого подвешенного груза;
- по меньшей мере часть по меньшей мере одного компонента вектора, которая по меньшей мере частично зависит, математически и/или физически, по меньшей мере от одного компонента вектора ускорения по меньшей мере одной точки упомянутого подвешенного груза;
- упомянутый компонент угловой скорости относится к оси, по меньшей мере приблизительно, общей по меньшей мере с частью подвешенного груза;
- упомянутое ускорение и угловую скорость можно рассматривать, по меньшей мере приблизительно, относительно системы отсчета, которую можно считать, по меньшей мере приблизительно, инерциальной, каким может быть поворот осей, составляющий одно целое с планетой Земля;
- упомянутые компоненты вектора угловой скорости и вектора ускорения обнаруживаются, или выявляются, или измеряются, соответственно, первичным преобразователем и вторичным преобразователем;
- упомянутый вектор входных сигналов u содержит по меньшей мере одно действие вращения, или вращающий момент, или момент, который система перемещения прикладывает по меньшей мере к части упомянутого аэродинамического средства.
Для того чтобы реализовать упомянутый предпочтительный способ, предпочтительный вариант осуществления настоящего изобретения обеспечивает, предпочтительно, но не исключительно, что:
- упомянутый первичный преобразователь содержит по меньшей мере один гироскоп или подобное устройство, предпочтительно цифровое и/или с полной шкалой +/-300 градусов в секунду;
- упомянутый вторичный преобразователь содержит по меньшей мере один акселерометр или подобное устройство, предпочтительно цифровое и/или с полной шкалой +/-3 g;
- частота, с которой выводы результатов измерения отбираются, а следовательно, частота, с которой блок T приобретает по меньшей мере один элемент набора данных, относящихся по меньшей мере к одной физической величине по отношению к подвешенному грузу, предпочтительно составляет приблизительно 800 Гц, а следовательно, приблизительно 800 раз в секунду;
- в упомянутых преобразователях предпочтительно используется, по меньшей мере частично, нанотехнология;
- упомянутое аэродинамическое средство содержит по меньшей мере часть крыла, предпочтительно с профилем, который является постоянным вдоль апертуры и симметричным;
- упомянутое действие вращения, в общем, определяет изменение угла атаки по меньшей мере части крыла относительно по меньшей мере части потока воздуха, которая воздействует на него.
Помимо этого, в предпочтительном варианте осуществления изобретения упомянутый процессор использует сигнал на входе, поступающий от акселерометра, чтобы идентифицировать по меньшей мере направление выступа, по меньшей мере на одном из участков крыла, вектора скорости по меньшей мере части потока текучей среды, которая воздействует по меньшей мере на часть упомянутого крыла таким образом, чтобы учесть это направление для вычисления сигнала на выходе для отправки в систему перемещения. Фактически, угол атаки между опорным направлением, общим с крылом, которое обычно совпадает с направлением относительной скорости в случае нулевой подъемной силы, и направлением относительной скорости, также называемым углом атаки, должен заключаться в пределах определенного диапазона, например, между плюс и минус 20 градусов, во избежание явления отрыва потока воздуха от поверхности упомянутого крыла.
Фактически, в логико-математических операциях, выполняемых программным обеспечением, в этом предпочтительном варианте осуществления, и очень обобщенно, принимаются следующие предположения:
- направление действия силы, возникающей вследствие поверхностного распределения аэродинамических нагрузок на упомянутом крыле, геометрически зависят по меньшей мере частично от направления скорости потока, который воздействует на крыло;
- например, упомянутая результирующая величина ортогональна упомянутой скорости, как в случае подъема, производимого тонкими профилями с высокой эффективностью, для углов атаки, которые являются не слишком большими;
- эту результирующую силу можно рассматривать, как прикладываемую вдоль оси, проходящей через точку, называемую центром давления, относительно которой это распределение аэродинамических нагрузок прикладывает нулевой вращающий момент;
- положение этого центра давления, таким образом, определяет момент, прикладываемый этой результирующей силой, а следовательно, этим распределением нагрузок, по отношению, например, к центру массы подвешенного груза;
- существует определенная математическая зависимость между модулем этой результирующей силы и скоростью, в зависимости по меньшей мере от угла атаки;
- прежде всего, математическая зависимость между модулем упомянутой результирующей силы и модулем упомянутой скорости выведена из теории, в которой поток, как предполагается, находится в режиме безотрывного обтекания поверхности крыла, а следовательно, не подвергается явлению отрыва. Следовательно, является очевидным, что возникновение этих явлений отрыва, в результате слишком большого угла атаки, подрывает надлежащую работу системы стабилизации вследствие того, что процессор, который управляет всей системой, не учитывает этих явлений. Очевидно, ничто не препятствует тому, чтобы процессор также учитывал эти явления, а следовательно, проблемы возможных углов атаки, которые являются слишком большими, не существует, даже если, как правило, отрыв потока связан с вихревыми процессами, которые являются довольно сложными и труднопредсказуемыми, по меньшей мере были такими еще во времена вычислений, допустимых в данном случае.
Другой аспект исходит из того, что возникновение возможных отрывов потока от поверхности крыла будет непосредственно влиять на возможность того же самого крыла, на строго физическом уровне и за рамками операций, выполняемых программным обеспечением, устанавливаться таким образом, чтобы проявить силу, способную замедлять скорость вращения подвешенного груза.
Снова обращаясь к использованию процессором информации, поступающей от акселерометра, следует отметить, что:
- момент, прикладываемый крылом на подвешенном грузе, изменяется на основании по меньшей мере его угла атаки относительно потока воздуха;
- направление скорости потока текучей среды относительно крыла, которое определяет этот угол атаки, предполагается процессором, в предпочтительном варианте осуществления, как параллельное и согласующееся с действием силы гравитации;
- упомянутый угол атаки изменяется в результате наклонного положения крыла относительно опорного уровня приводного механизма, а следовательно, даже если в определенном смысле математически косвенно, также вращающего момента, прикладываемого этим приводным механизмом к этому крылу;
- упомянутый вращающий момент в свою очередь зависит от сигнала на выходе процессора.
Поэтому процессор, предпочтительно и очень обобщенно, выполняет по меньшей мере следующие этапы:
- по меньшей мере через сигнал, поступающий от акселерометра, он вычисляет наклонное положение направления действия силы гравитации, а следовательно, вектора скорости, относительно опорного уровня приводного механизма;
- исходя из угла атаки, необходимого для того, чтобы иметь желательный аэродинамический эффект, рассчитанный на основании по меньшей мере сигнала от гироскопа, он отслеживает наклонное положение, которое крыло должно принять относительно этого опорного уровня приводного механизма, чтобы это крыло приняло этот необходимый угол атаки;
- на основании этого наклонного положения он посылает определенный сигнал на выходе к приводному механизму.
В некоторых случаях по меньшей мере одно средство может присутствовать для фильтрации по меньшей мере одного сигнала на входе, последний отправляется по меньшей мере одним преобразователем в процессор и относится к ускорению или угловой скорости. Упомянутое фильтрующее средство предпочтительно является подходящим для оперирования с дискретными сигналами, и в этом случае предпочтительно включено в состав непосредственно по меньшей мере одного из двух преобразователей или возможно единого преобразователя, который выполняет функцию обоих. Упомянутое фильтрующее средство, предпочтительно размещенное непосредственно ниже по потоку по меньшей мере от одного из преобразователей, или возможно, единого преобразователя, является подходящим для устранения частот либо относительно нарушений, не представляющих интерес, либо тех, которые в любом случае должны быть устранены, например, для устранения любых проблем искажения информации. Поэтому это устранение, относительно нежелательных гармонических составляющих, происходит прежде, чем упомянутый сигнал обрабатывается процессором, чтобы логические операции, выполняемые последним, не приводили к сигналам на выходе, не соответствующим тому, что требуется получить на основании реализуемой программы.
На фиг. 2 показаны, сверху, носилки 8 с прикрепленным крылом 9, оба подвергаются воздействию возможной физической ситуации, заключающейся во вращении в направлении стрелки O, из-за аэродинамического воздействия лопастей вертолета. Последний, как предполагается, находится в неподвижном состоянии, а следовательно, в режиме висения, как обычно происходит во время операций подъема носилок 8, в то время как происходит это вращение вокруг оси 10 вращения, перпендикулярной верхней поверхности упомянутых носилок 8, которые, как предполагается исключительно ради простоты, являются идеально прямоугольными.
Упомянутая ось 10 вращения также проходит, например, через центр массы носилок 8 и обозначена символом x, в том смысле, что на фиг. 2 она входит перпендикулярно. Крыло 9 можно поворачивать, известным образом, вокруг оси 11 продольной симметрии или оси 11 вращения носилок 8. Относительно упомянутого крыла 9, видна только область передней кромки 12, в то время как ради простоты ни спасатель с пострадавшим, ни другие компоненты согласно настоящему изобретению не показаны.
Фиг. 3a и 3b показывают две различные физические ситуации, в дальнейшем обозначаемые a) и b), обе из которых, однако, могут соответствовать виду слева на фиг. 2. Фактически в обеих этих ситуациях носилки 8 вращаются вокруг оси 10, которая в обоих случаях перпендикулярна верхней поверхности тех же носилок 8, так что фиг. 2 может представлять обе эти ситуации.
Прежде всего следует отметить, что:
- на фиг. 3a-5c, ось g, ориентированная вниз, согласуется с вектором силы гравитации и параллельна ему;
- предполагается, что последний вектор, в свою очередь, параллелен вектору скорости воздуха в канале потока и согласуется с ним, как это обычно происходит с вертолетом в режиме висения и с незначительным боковым ветром относительно скорости, вызванной каналом потока, так что эта ось g также может быть определена как «ось скорости».
Эти две ситуации a) и b) отличаются тем, что:
- в первой, как можно видеть также на фиг. 3a, носилки 8, которые показаны без крыла ради ясности, перпендикулярны оси g скорости;
- во второй, вместо этого, как можно видеть на фиг. 3b, носилки 8 повернуты на угол β, вокруг соответствующей оси 11 вращения, при этом упомянутый угол может составлять, например, 15 градусов. Поэтому очевидно, что перпендикуляр к носилкам 8, вокруг которого фактически происходит вращение, наклонен, следовательно под углом β, равным 15 градусам, относительно оси g скорости. Кроме того, исключительно ради ясности, следует отметить, что этот угол β эквивалентен, как можно снова заметить на фиг. 3b, углу между плоскостью носилок 8 и горизонтальной плоскостью.
При изучении фиг. 4a и 4b, которые эквивалентны, соответственно, фиг. 3a и 3b, но с добавлением крыла 9, будет очевидно, что в обеих ситуациях a) и b) хорда c крыла 9, профиль которой, как предполагается ради простоты, является постоянным и симметричным, каким может быть, например, NACA 0012 (Ассоциация воздушных перевозчиков), выровнена с осью 10 вращения. Упомянутая хорда c, которая, как известно, является прямой линией, соединяющей переднюю кромку 12 с задней кромкой 13 профиля, является опорным уровнем, с которым нужно рассматривать угол атаки того же профиля, а следовательно, в этом случае всего крыла 9, относительно направления скорости g. На самом деле хорошо известно, что симметричные профили с нулевым углом атаки не производят подъем.
Помимо этого предполагается, вновь с единственной целью упрощения описания, что:
- ось регулирования приводного механизма или двигателя, которая является осью, относительно которой этот двигатель устанавливает наклонное положение крыла в зависимости от сигнала, принимаемого на входе, перпендикулярна верхней поверхности носилок 8, а следовательно, параллельна их оси 10 вращения;
- в обеих ситуациях 4a и 4b хорда крыла параллельна этой оси регулирования.
Таким образом, можно непосредственно заметить, что:
- в ситуации на фиг. 4a, угол атаки упомянутого крыла 9 относительно оси g скорости является нулевым по той причине, что хорда крыла совпадает с упомянутой осью g скорости;
- в ситуации на фиг. 4b угол атаки упомянутого крыла 9 относительно оси g скорости равен β по той причине, что ось 10 вращения, совпадающая с хордой c крыла, наклонена, относительно упомянутой оси g скорости, фактически под углом, равным β.
Поэтому следует отметить, что:
- в ситуации на фиг. 4a, эффективный угол атаки крыла относительно скорости соответствует наклонному положению упомянутого крыла 9 относительно оси регулирования двигателя;
- в ситуации на фиг. 4b, вместо этого, они расположены в шахматном порядке фактически под углом, равным β, а следовательно, фактически под углом 15°.
Исходя из этих физических ситуаций, первичный преобразователь, который может содержать по меньшей мере гироскоп, измеряет угловую скорость носилок и посылает относительный сигнал на вход процессора, который обрабатывает его и в свою очередь посылает сигнал на выходе в систему перемещения или двигатель. На этом этапе следует отметить, что если упомянутый сигнал на выходе является подходящим для того, чтобы заставить упомянутый двигатель установить определенный угол атаки относительно скорости, предпочтительно, что процессор принимает во внимание направление этой скорости относительно упомянутой оси регулирования, во время логически-математической обработки сигналов на входе, поступающих от преобразователей.
На этом этапе следует отметить, что:
- исходя из ситуации на фиг. 4a, в этом случае ось регулирования двигателя является параллельной оси g скорости, если процессор посылает сигнал в двигатель, соответствующий заданному наклону крыла 9, равному, например, 10°, этот двигатель, следовательно, размещает его с наклоном 10° относительно скорости, как показано на фиг. 4a, или по меньшей мере действует в этом направлении;
- исходя из ситуации 4b, вместо этого, процессор должен принять во внимание направление скорости g, по той причине, что важно получить наклон крыла 9 относительно этого направления скорости g, а не относительно оси регулирования двигателя.
Таким образом, подводя итог, отметим, что процессор через данные ускорения, которые поступают от акселерометра, отслеживает наклон силы гравитации, а следовательно, скорости, относительно оси регулирования двигателя и посылает сигнал на выходе к тому же двигателю. Упомянутый сигнал на выходе должен соответствовать определенному конечному наклонному положению крыла 9 относительно упомянутой оси регулирования, и упомянутое конечное наклонное положение должно в свою очередь соответствовать определенному углу атаки α того же крыла 9 относительно скорости воздуха.
На фиг. 5a и 5b показано крыло 9, соответственно, в ситуациях a) и b), после того, как оно было повернуто двигателем до достижения угла установки α, равного 10 градусов, относительно скорости воздуха. Следует отметить, что различие между этими двумя ситуациями заключается только в наклоне β носилок относительно горизонтальной плоскости.
Тем не менее, можно отметить следующее:
- чтобы произвести изменение от ситуации, представленной на фиг. 4a, к ситуации, представленной на фиг. 5a, двигатель поворачивает упомянутое крыло 9 на 10 градусов в направлении по часовой стрелке;
- чтобы произвести изменение от ситуации, представленной на фиг. 4b, к ситуации, представленной на фиг. 5b, двигатель поворачивает крыло 9 на 5 градусов в направлении против часовой стрелки, для достижения в любом случае одного и того же конечного результата, который заключается в наличии угла атаки крыла, равного 10°, относительно скорости g воздуха. В последнем случае, фактически, крыло начинает движение, благодаря результату ориентации носилок 8, уже от угла атаки 15°.
Как показано на фиг. 5a, 5b и 6, этот наклон α создает, в общих чертах, силу P, действующую на крыло и по меньшей мере частично также на остающуюся часть подвешенного груза, при этом упомянутое крыло по меньшей мере частично закреплено с помощью известного средства на упомянутом подвешенном грузе. Упомянутая сила P, которую можно рассматривать как прикладываемую в центре давления крыла, стремится проявлять момент, например, относительно центра массы носилок, или в любом случае всего подвешенного груза, и упомянутый момент стремится повернуть последний в направлении стрелки O' в соответствии с фиг. 6, а следовательно, в направлении, противоположном направлению вращения О, показанному на фиг. 2, таким образом определяя уменьшение угловой скорости носилок 8 или по меньшей мере части подвешенного груза. На этой фиг. 6 крыло и носилки 8 показаны сверху и заметна задняя кромка 13 крыла 9, видимая фактически благодаря наклону упомянутого крыла 9.
Если, исходя из ситуации, показанной на фиг. 4b, и в отсутствие акселерометра, процессор должен послать, только на основании сигнала от гироскопа, тот же сигнал на выходе по отношению к ситуации, показанной на фиг. 4a, упомянутый сигнал на выходе вызовет поворот крыла 9 на 10 градусов по часовой стрелке, до угла атаки α’, равного 25 градусов, как показано на фиг. 5c. Если крыло имеет критический угол атаки, например, равный 20 градусов, будет создаваться значительно меньшая сила Р, даже равная нулю, с последующей неэффективностью системы стабилизации, которая даже может иметь дестабилизирующий эффект.
Фиг. 7 показывает вид с пространственным разделением деталей некоторых компонентов системы стабилизации. Относительно крыла 9 и коробки 14, которая содержит процессор, преобразователи, какие-либо батареи и двигатель, можно отметить, что все компоненты являются известными и не показаны, потому что находятся внутри упомянутой коробки 14. Вал 15 двигателя выступает из упомянутой коробки 14 для соединения с валом крыла 16, который является неотъемлемой частью и проходит внутрь в это крыло 9. Два вала, двигателя 15 и крыла 16, по меньшей мере частично принуждаются вращаться вместе, предпочтительно посредством штифта 20, проходящего по меньшей мере частично через оба и подходящего для удерживания их по меньшей мере частично закрепленными.
Этот вариант осуществления также обеспечивает систему по меньшей мере для частичного аварийного разъединения крыла 9 с системой стабилизации, которое по меньшей мере частично закреплено известным образом на носилках, предпочтительно посредством по меньшей мере одного плеча 17 рычага. Упомянутая система разъединения состоит из рычага 18, соединенного с проводом 19, который, при соответствующем перемещении упомянутого рычага 18, передвигает упомянутый штифт 20, чтобы освободить вал 15 двигателя от вала крыла 16.
Крыло 9 на этом этапе является расфиксированным, то есть свободно поворачивается на вале 15 двигателя, теряя эффективность, но все еще способно оказывать демпфирующее или усиливающее воздействие на скорость вращения подвешенного груза. В качестве альтернативы, вал крыла 9 вместе с самим крылом 9 также может быть удален наружу соответствующей пружиной, которая функционально расположена между упомянутыми валами и которая сжата относительно положения равновесия, а также лишена возможности действовать, когда упомянутый штифт 20 находится в рабочем положении, то есть закрепляет упомянутый вал 15 двигателя на упомянутом вале крыла 16. Упомянутая пружина, получающая свободу действия, как только это аэродинамическое средство освобождается от остальной части системы стабилизации, выталкивает наружу первый из них относительно второго.
Система аварийного разъединения также может состоять, но не только, из магнитных и/или электрических соединений, также как только из физических, с возможным дистанционным управлением, также с земли или с борта вертолета, известным способом.
Могут быть сделаны изменения в отношении конструкции и/или присущие возможному способу использования, а следовательно, относительно системы управления, которые в любом случае входят в объем защиты настоящей заявки, в соответствии с тем, что выражено формулой изобретения.

Изобретение относится к автоматической системе стабилизации скорости вращения по меньшей мере одного подвешенного груза, прикрепленного к вертолету. Автоматическая система содержит по меньшей мере одно аэродинамическое средство - крыло (9), причем крыло (9) по меньшей мере частично закреплено на подвешенном грузе, по меньшей мере одну систему перемещения, выполненную с возможностью перемещения по меньшей мере части крыла (9), по меньшей мере один датчик угловой скорости, определяемый здесь как первичный датчик, по меньшей мере одно программное обеспечение или компьютерную программу и по меньшей мере один процессор, на котором по меньшей мере установлено программное обеспечение. Посредством системы, на основании по меньшей мере величины по меньшей мере части по меньшей мере одного компонента угловой скорости подвешенного груза, причем упомянутая величина является обнаруживаемой первичным датчиком, автоматически создается физическое воздействие посредством взаимодействия между аэродинамическим средством и каналом потока, расположенным ниже по потоку от лопастей вертолета, и посредством процессора. Физическое воздействие является моментом или вращающим моментом, действующим по меньшей мере на часть подвешенного груза, стремящегося стабилизировать и уменьшить скорость вращения этого подвешенного груза. Система может быть особенно полезной в спасательных операциях, выполняемых с помощью вертолета, особенно во время этапов подъема или опускания, соответственно, подвешенного груза, состоящего главным образом из спасателя, носилок и пострадавшего, лежащего на них. Технический результат: обеспечение системы стабилизации по меньшей мере одного подвешенного груза, предпочтительно для операций спасения с помощью вертолета, которая требует меньшего количества энергии для работы по отношению к уже известным устройствам и имеет лучшую эффективность, также когда подвешенный груз приближается к вертолету. 3 н. и 8 з.п. ф-лы, 11 ил.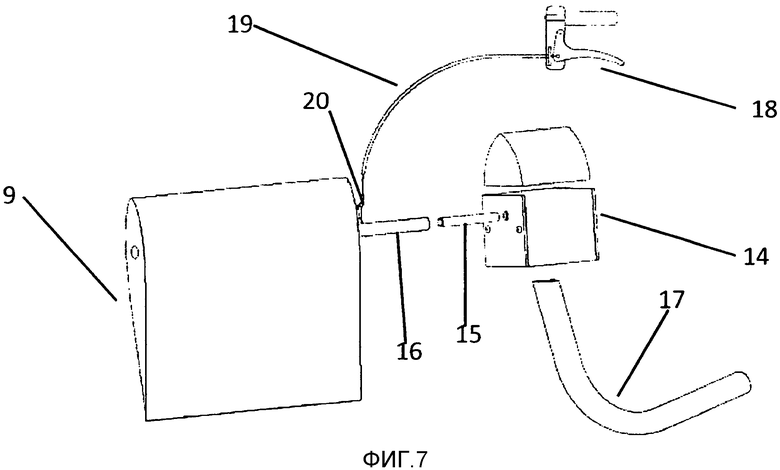
1. Автоматическая система стабилизации скорости вращения по меньшей мере одного подвешенного груза, прикрепленного к вертолету, отличающаяся тем, что
- упомянутая система содержит по меньшей мере одно аэродинамическое средство (9), причем упомянутое аэродинамическое средство (9) по меньшей мере частично закреплено на упомянутом подвешенном грузе,
- упомянутая система содержит по меньшей мере одну систему перемещения, выполненную с возможностью перемещения по меньшей мере части упомянутого аэродинамического средства (9),
- упомянутая система содержит по меньшей мере один датчик угловой скорости, определяемый здесь как первичный датчик,
- упомянутая система содержит по меньшей мере одно программное обеспечение или компьютерную программу,
- упомянутая система содержит по меньшей мере один процессор, на котором по меньшей мере частично установлено упомянутое программное обеспечение,
- посредством упомянутой системы, на основании по меньшей мере величины по меньшей мере части по меньшей мере одного компонента угловой скорости упомянутого подвешенного груза, причем упомянутая величина является обнаруживаемой упомянутым первичным датчиком, автоматически создается физическое воздействие посредством взаимодействия между упомянутым аэродинамическим средством и каналом потока, расположенным ниже по потоку от лопастей упомянутого вертолета и посредством упомянутого процессора,
- упомянутое физическое воздействие является моментом или вращающим моментом, действующим по меньшей мере на часть упомянутого подвешенного груза, стремящегося стабилизировать и уменьшить скорость вращения этого подвешенного груза.
2. Автоматическая система стабилизации вращения по меньшей мере одного подвешенного груза по п. 1,
отличающаяся тем, что упомянутая система перемещения выполнена по меньшей мере частично с искусственным источником энергии, и тем, что упомянутая система содержит по меньшей мере следующие компоненты:
- по меньшей мере одно устройство преобразования, связанное с упомянутым первичным датчиком, причем комбинация упомянутого первичного датчика и устройства преобразования составляет первичный преобразователь,
- упомянутый первичный преобразователь по меньшей мере частично закреплен на упомянутым подвешенном грузе,
- по меньшей мере одно средство связи, по меньшей мере частично электрическое и/или электронное и/или компьютерное, подходящее для обеспечения взаимного сопряжения или взаимодействия по меньшей мере одной из следующих пар компонентов:
- упомянутого процессора и первичного преобразователя,
- упомянутого процессора и системы перемещения.
3. Автоматическая система стабилизации вращения по меньшей мере одного подвешенного груза по п. 2, отличающаяся тем, что содержит по меньшей мере следующие дополнительные компоненты:
- по меньшей мере один другой датчик, определяемый здесь как вторичный датчик,
- по меньшей мере одно устройство преобразования, связанное с упомянутым вторичным датчиком, причем комбинация упомянутого вторичного датчика и устройства преобразования составляет преобразователь, определяемый здесь как вторичный, который также может быть объединен с упомянутым первичным преобразователем в единый преобразователь,
- при этом упомянутый вторичный преобразователь по меньшей мере частично закреплен на упомянутом подвешенном грузе,
- по меньшей мере одно средство связи, по меньшей мере частично электрическое и/или электронное и/или компьютерное, подходящее для обеспечения взаимодействия или сопряжения по меньшей мере между упомянутым вторичным преобразователем и системой перемещения.
4. Автоматическая система стабилизации вращения по меньшей мере одного подвешенного груза по п. 2, отличающаяся тем, что
- упомянутое аэродинамическое средство (9) состоит по меньшей мере частично по меньшей мере из одной аэродинамической поверхности или крыла (9), отличающегося по меньшей мере частично определенным аэродинамическим профилем,
- упомянутая система перемещения или двигатель способен перемещать по меньшей мере часть упомянутого крыла (9), предпочтительно поворачивая его, посредством по меньшей мере одного элемента, по меньшей мере частично закрепленного на упомянутом двигателе, который может быть валом, определяемым здесь как вал (15) двигателя,
- упомянутый элемент по меньшей мере частично закреплен по меньшей мере на одном конструктивном элементе (16), который связан с упомянутым аэродинамическим средством (9) и/или по меньшей мере частично закреплен на нем,
- упомянутое программное обеспечение функционирует по меньшей мере частично по меньшей мере с помощью одного языка программирования,
- упомянутый первичный датчик представляет собой гироскоп или подобное устройство,
- по меньшей мере одно средство связи состоит, по меньшей мере частично, из какого-либо аналого-цифрового или цифроаналогового преобразователя.
5. Автоматическая система стабилизации вращения по меньшей мере одного подвешенного груза по пп. 2 и 3, отличающаяся тем, что
- упомянутое аэродинамическое средство (9) состоит по меньшей мере частично по меньшей мере из одной аэродинамической поверхности или крыла (9), отличающегося по меньшей мере частично определенным аэродинамическим профилем,
- упомянутая система перемещения или двигатель способен перемещать по меньшей мере часть упомянутого крыла (9), предпочтительно поворачивая его, посредством по меньшей мере одного элемента, по меньшей мере частично закрепленного на упомянутом двигателе, который может быть валом, определяемым здесь как вал (15) двигателя,
- упомянутый элемент по меньшей мере частично закреплен по меньшей мере на одном конструктивном элементе (16), который связан с упомянутым аэродинамическим средством (9) и/или по меньшей мере частично закреплен на нем,
- упомянутое программное обеспечение функционирует по меньшей мере частично по меньшей мере с помощью одного языка программирования,
- упомянутый первичный датчик представляет собой гироскоп или подобное устройство,
- по меньшей мере одно средство связи состоит, по меньшей мере частично, из какого-либо аналого-цифрового или цифроаналогового преобразователя,
- упомянутый вторичный датчик представляет собой акселерометр или подобное устройство.
6. Способ использования автоматической системы стабилизации вращения по меньшей мере одного подвешенного груза по любому из пп. 2-5, отличающийся тем, что он выполняет, предпочтительно циклически и/или многократно, по меньшей мере один из следующих этапов:
- первичный преобразователь обнаруживает, а следовательно, выявляет, по меньшей мере часть по меньшей мере одного компонента вектора, которая по меньшей мере частично зависит, математически и/или физически, по меньшей мере от одного компонента вектора угловой скорости по меньшей мере части упомянутого подвешенного груза,
- по меньшей мере часть выявления упомянутого первичного преобразователя, возможно, преобразованная в сигнал, предпочтительно аналоговый, электрический и/или электронный, посылается в процессор в качестве первичного входного сигнала,
- процессор обрабатывает, по меньшей мере математически и/или логически, по меньшей мере часть упомянутого первичного входного сигнала, возможно, соответствующим образом преобразованную в цифровую форму,
- процессор, следовательно, на основании по меньшей мере части упомянутого первичного входного сигнала, посылает по меньшей мере один выходной сигнал для системы перемещения,
- на основании по меньшей мере части упомянутого выходного сигнала, возможно, соответствующим образом преобразованной в аналоговую форму, упомянутая система перемещения перемещает, относительно по меньшей мере одного потока воздуха, по меньшей мере часть этого аэродинамического средства (9), предпочтительно по меньшей мере поворачивая ее,
- создают изменение по меньшей мере части аэродинамических нагрузок, действующих на упомянутое аэродинамическое средство (9), вследствие его перемещения, сообщаемого упомянутой системой перемещения,
- по меньшей мере часть упомянутых аэродинамических нагрузок, в результате по меньшей мере этого изменения, прикладывает, в целом, по меньшей мере один момент к подвешенному грузу, например, относительно центра массы последнего,
- упомянутый момент определяет по меньшей мере одно изменение, которое предпочтительно состоит из уменьшения, абсолютной величины по меньшей мере одного компонента вектора угловой скорости по меньшей мере части этого подвешенного груза, при этом последний компонент предпочтительно по меньшей мере частично связан, физически и/или математически, по меньшей мере с компонентом угловой скорости, изначально обнаруженным первичным преобразователем,
упомянутый процесс, предпочтительно циклически и/или многократно, также способен выполнять все эти этапы, предпочтительно по меньшей мере частично в представленной последовательности, или по меньшей мере два из этих этапов, причем последние два этапа также могут быть
- по меньшей мере частично одновременными,
- и/или предпочтительно по меньшей мере частично в представленной последовательности,
- и/или также разделены другим этапом в этой последовательности, причем последний другой этап в упомянутом способе может отсутствовать.
7. Способ использования автоматической системы стабилизации вращения по меньшей мере одного подвешенного груза или по любому из пп. 3 или 5, отличающийся тем, что он выполняет, предпочтительно циклически и/или многократно, по меньшей мере один из следующих этапов:
- первичный преобразователь обнаруживает, а следовательно, выявляет, по меньшей мере, часть по меньшей мере одного компонента вектора, которая по меньшей мере частично зависит, математически и/или физически, по меньшей мере от одного компонента вектора угловой скорости по меньшей мере части упомянутого подвешенного груза,
- по меньшей мере часть выявления упомянутого первичного преобразователя, возможно, преобразованная в сигнал, предпочтительно аналоговый, электрический и/или электронный, посылают в процессор в качестве первичного входного сигнала,
- вторичный преобразователь обнаруживает, а следовательно, выявляет, по меньшей мере, часть по меньшей мере одного компонента физической величины, которая может быть векторной, которая по меньшей мере частично зависит от наклона и/или от ориентации вектора скорости по меньшей мере части воздуха, воздействующей по меньшей мере частично на упомянутое аэродинамическое средство (9), при этом упомянутый наклон и/или ориентация определяется относительно опорного направления, составляющего одно целое по меньшей мере с частью последнего, или в любом случае последняя физическая величина в состоянии по меньшей мере частично зависеть, физически и/или математически, по меньшей мере от одного физического события в отношении по меньшей мере части этого аэродинамического средства (9),
- по меньшей мере часть выявления упомянутого вторичного преобразователя, возможно, преобразованная в сигнал, предпочтительно аналоговый, электрический и/или электронный, посылают в процессор в качестве вторичного входного сигнала,
- процессор обрабатывает, по меньшей мере математически и/или логически, по меньшей мере часть упомянутых первичного и вторичного входных сигналов, возможно, соответствующим образом преобразованную в цифровую форму,
- процессор, следовательно, на основании по меньшей мере части упомянутых первичного и вторичного входных сигналов, посылает по меньшей мере один выходной сигнал, который может быть в цифровой форме, в средство перемещения,
- на основании по меньшей мере части упомянутого выходного сигнала, возможно, соответствующим образом преобразованной в аналоговую форму, упомянутая система перемещения перемещает, относительно по меньшей мере одного потока воздуха, по меньшей мере часть этого аэродинамического средства (9), предпочтительно по меньшей мере поворачивая ее,
- создают изменение по меньшей мере части аэродинамических нагрузок, действующих на упомянутое аэродинамическое средство (9), вследствие его перемещения, сообщаемого упомянутой системой перемещения,
- по меньшей мере часть упомянутых аэродинамических нагрузок, в результате по меньшей мере этого изменения, прикладывает, в целом, по меньшей мере один момент к подвешенному грузу, например, относительно центра массы последнего,
- упомянутый момент определяет по меньшей мере одно изменение, которое предпочтительно состоит из уменьшения, абсолютной величины по меньшей мере одного компонента вектора угловой скорости по меньшей мере части этого подвешенного груза, при этом последний компонент предпочтительно по меньшей мере частично связан, физически и/или математически, по меньшей мере с компонентом угловой скорости, изначально обнаруженным первичным преобразователем,
упомянутый процесс, предпочтительно циклически и/или многократно, также способен выполнять все эти этапы, предпочтительно по меньшей мере частично в представленной последовательности, или по меньшей мере два из этих этапов, причем последние два этапа также могут быть
- по меньшей мере частично одновременными,
- и/или предпочтительно по меньшей мере частично в представленной последовательности,
- и/или также разделены другим этапом в этой последовательности, причем последний другой этап в упомянутом способе может отсутствовать.
8. Способ использования автоматической системы стабилизации вращения по меньшей мере одного подвешенного груза по предыдущему п. 7, отличающийся тем, что упомянутая часть, обнаруженная вторичным преобразователем, является по меньшей мере частью по меньшей мере одного компонента вектора, который по меньшей мере частично зависит, математически и/или физически, по меньшей мере от одного компонента вектора ускорения по меньшей мере одной точки подвешенного груза.
9. Способ использования автоматической системы стабилизации вращения по меньшей мере одного подвешенного груза по п. 7, отличающийся тем, что упомянутый процессор использует обнаружение вторичного датчика для определения, по меньшей мере приблизительно, по меньшей мере направления по меньшей мере части по меньшей мере одного компонента вектора скорости по меньшей мере части потока воздуха, которая воздействует по меньшей мере на часть упомянутого аэродинамического средства (9).
10. Автоматическая система стабилизации вращения по меньшей мере одного подвешенного груза по любому из пп. 1-5, отличающаяся тем, что она содержит по меньшей мере одну систему по меньшей мере частичного аварийного разъединения упомянутого аэродинамического средства (9), способную взаимно разъединять упомянутый вал (15) двигателя и конструктивный элемент (16), и предпочтительно по меньшей мере одну пружину, функционально расположенную между упомянутым валом (15) двигателя и конструктивным элементом (16), причем упомянутая пружина выполнена с возможностью выталкивать наружу это аэродинамическое средство (9) относительно остальной части системы стабилизации и после его расцепления.
11. Автоматическая система стабилизации вращения по меньшей мере одного подвешенного груза по предыдущему п. 10, отличающаяся тем, что упомянутая система разъединения смещает соответствующим образом по меньшей мере один штифт (20) или другой элемент, эквивалентный ему, подходящий для поддерживания взаимно соединенных упомянутого вала (15) двигателя и конструктивного элемента (16), при этом упомянутый штифт (20) проходит по меньшей мере частично в оба, и тем, что упомянутая пружина сжата относительно положения равновесия и ее действие предотвращается, когда упомянутый штифт (20) взаимно удерживает упомянутый вал (15) двигателя и конструктивный элемент (16) аэродинамического средства (9).
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2209745C2 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2429166C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2350511C1 |
| US 6517131 B1, 11.02.2003. | |||

