Область техники, к которой относится изобретение
Изобретение относится к области контроля движения дорожного транспорта, а именно к способам определения скорости движения транспортного средства на криволинейном участке автодороги.
Уровень техники
Известен способ контроля движения транспортных средств (патент РФ №2488171, МПК G08G 1/017, G08G 1/052, опубл. 20.07.2013), включающий измерение скорости транспортных средств и фиксацию номерных знаков транспортных средств при помощи видеокамеры, измерение скорости транспортных средств производят на выделенном участке дороги, при этом фиксируют номерные знаки транспортных средств с помощью одной видеокамеры, расположенной на въезде на выделенный участок дороги с одновременной регистрацией времени фиксации, и заносят их в базу движения на выделенном участке дороги, фиксируют номерные знаки транспортных средств с помощью второй видеокамеры, расположенной на выезде с выделенного участка дороги, с одновременной регистрацией времени фиксации, и заносят их в базу движения на выделенном участке дороги, вычисляют среднюю скорость движения на выделенном участке дороги каждого транспортного средства, при превышении средней скорости движения над разрешенной на выделенном участке дороги производят автоматическую фиксацию нарушений правил дорожного движения в виде нарушения скоростного режима с идентификацией конкретных нарушителей правил дорожного движения без конкретизации места выделенного участка дороги, на котором была превышена скорость, отличающийся тем, что в случае превышения средней скорости движения над разрешенной на выделенном участке дороги, имеющем несколько зон с известной длиной  каждая со своей известной различной допустимой максимальной скоростью движения
каждая со своей известной различной допустимой максимальной скоростью движения  , величину превышения скорости считают исходя из принципа максимальной лояльности к пользователю транспортного средства, то есть такой, для которой превышение скорости на одной зоне равно превышению скорости на остальных зонах и минимально по абсолютной величине, то есть
, величину превышения скорости считают исходя из принципа максимальной лояльности к пользователю транспортного средства, то есть такой, для которой превышение скорости на одной зоне равно превышению скорости на остальных зонах и минимально по абсолютной величине, то есть  при условии
при условии  , где tn - время прохождения n-й зоны, t - общее время прохождения всего участка дороги.
, где tn - время прохождения n-й зоны, t - общее время прохождения всего участка дороги.
Однако в данном способе не учитывается криволинейность участка автодороги, что приводит к увеличению вероятности пропуска нарушений скоростного режима.
Известен способ контроля нарушения правил дорожного движения автотранспортным средством, (патент ЕА №17679, МПК G08G 1/052, G06F 17/30, опубл. 28.02.2013), содержащий этапы, на которых фиксируют факт проезда автотранспортного средства по меньшей мере одним регистратором, формируют полный набор данных факта проезда и сохраняют его на регистраторе; передают полный набор данных факта проезда на сервер и обрабатывают на сервере принятый полный набор данных факта проезда, причем разделяют полный набор данных факта проезда, сохраненных на регистраторе, на набор легких данных, являющихся данными для установления факта нарушения, и набор тяжелых данных, являющихся данными для подтверждения факта нарушения; формируют пакет легких данных по меньшей мере из одного набора легких данных и передают его на сервер; устанавливают факт нарушения правил дорожного движения автотранспортным средством на основании сравнения величины, вычисленной по данным по меньшей мере одного набора легких данных, принятых по меньшей мере от одного регистратора, с предварительно определенной пороговой величиной.
Однако в данном способе не учитывается криволинейность участка автодороги, что приводит к увеличению вероятности пропуска нарушений скоростного режима.
Известные из данной области техники системы позволяют определять длину участка пути на основании двух координат как кратчайшее расстояние от точки входа до точки выхода, которым является отрезок виртуальной прямой. В случае наличия значительных отклонений формы контролируемых участков от прямолинейной (наличие поворотов, спусков, подъемов и т.д.) измеренная скорость движения автомобиля значительно отличается от фактической на участке автодороги, что существенно снижает вероятность привлечения нарушителя к административной ответственности (например, фактически водитель ехал со скоростью 90 км/ч, а зафиксировали только 60 км/ч, т.е. нарушение не выявлено). Кроме того, при определении длины участка пути следует учитывать, что реальная дорога обладает ненулевой шириной.
Поэтому возникает задача более точного измерения скорости движения транспортного средства, движущегося по участку дороги, содержащему криволинейные сегменты. Известные решения не учитывают наличия на автодороге криволинейных сегментов, что приводит к частым ошибкам регистрации фактов нарушения скоростного режима.
Раскрытие изобретения
Задачей заявляемого изобретения является регистрация нарушений скоростного режима посредством определения средней скорости движения на участке автодороги, содержащем криволинейные сегменты с минимальным количеством ошибок регистрации фактов нарушения скоростного режима транспортными средствами.
Техническим результатом, достигаемым при использовании заявленного изобретения, является снижение вероятности пропуска нарушений скоростного режима транспортным средством на участке автодороги, содержащем криволинейные сегменты, при соблюдении принципа лояльности к автомобилистам.
Снижение вероятности пропуска нарушений достигается за счет того, что средняя скорость рассчитывается на основе более точной оценки длины траектории, по которой движется транспортное средство.
Под принципом лояльности в рамках данной заявки понимается гарантированное отсутствие регистрации факта нарушения при отсутствии нарушения правил дорожного движения автомобилистом. Это достигается за счет того, что при расчете средней скорости по известной формуле:
 ,
,
где L - длина участка автодороги, a Δt - время прохождения участка, полученное значение средней скорости будет соответствовать оценке средней скорости снизу за счет использования при расчете минимальной длины пути, пройденного транспортным средством, т.е. оценке гарантированно не превышающей реальное значение средней скорости, но приближающейся к нему. Таким образом исключается риск возможного завышения реальной средней скорости и ошибочной фиксации факта нарушения.
Очевидно, что наиболее точная оценка средней скорости будет определяться на основе измерения длины пути, проходящего по линии, проведенной вдоль дорожного полотна строго по его середине, так как средняя погрешность измерений в таком случае стремится к нулю, а абсолютная погрешность измерений стремится к минимуму. Однако такая оценка может быть как выше, так и ниже реальной средней скорости автотранспортного средства, что особенно сильно будет проявляться на многополосных автодорогах.
Таким образом, хотя такой подход позволил бы более точно оценивать среднюю скорость движения автотранспортных средств и фиксировать больше фактов действительных нарушений, он привел бы к фиксации нарушений у автомобилистов, которые в действительности не нарушали скоростной режим, а просто двигались по более короткому пути, нежели тот, который измерен по средней линии дорожного полотна.
Совершенно очевидно, что при движении в повороте на 4-х полосной дороге путь, пройденный по внутреннему радиусу значительно короче пути, пройденного по внешнему радиусу, также он короче и пути, пройденного по середине дороги. Поэтому при оценке пройденного пути на основании пути, проходящего по линии, проведенной вдоль дорожного полотна строго по его середине могут быть оштрафованы водители, двигающиеся с максимальной разрешенной скоростью по самой короткой траектории.
Кроме того измерение длины пути, проходящего по линии, проведенной вдоль дорожного полотна строго по его середине, сопряжено с риском для жизни и здоровья людей, проводящих измерения, так как проводить какие-либо действия на середине автодороги или в крайней левой полосе автодороги, особенно загородной, крайне опасно. Либо это потребует остановки движения по всему участку автодороги, на котором проводятся измерения.
Поэтому для целей мониторинга транспортных потоков и выявления фактов превышения установленной скорости движения предложено определять нижнюю оценку скорости движения, т.е. определять минимальную среднюю скорость, которая гарантировано была достигнута на участке автодороги. В рамках данного изобретения требуемую оценку средней скорости транспортного средства на участке автодороги определяют на основе оценки снизу длины участка автодороги, которая получается следующим образом: участок автодороги разбивают на сегменты, которые среди прочих содержат криволинейные сегменты; определяют длины всех сегментов участка автодороги, причем для криволинейных сегментов в качестве оценки длины используют длину сегмента, измеренную по внутреннему радиусу поворота автодороги; определяют длину участка автодороги путем сложения длин всех ее сегментов.
Таким образом, требуется проводить измерения по обочине дороги, что гораздо безопаснее для людей, проводящих эти измерения, и не требует остановки транспортного потока на измеряемом участке автодороги. В крайнем случае, на время измерений можно ограничить движение по крайней правой полосе. Таким образом предложенный способ обеспечивает снижение риска получить травму при осуществлении измерений и минимизирует неудобства для автомобилистов, связанные с движением по измеряемому участку автодороги.
В одном аспекте изобретения раскрыт способ определения средней скорости движения транспортного средства на участке автодороги, содержащем криволинейные сегменты, содержащий этапы, на которых: определяют длину участка автодороги; фиксируют время въезда транспортного средства на участок автодороги и время выезда транспортного средства с участка автодороги с помощью средств регистрации факта проезда транспортного средства; определяют время движения транспортного средства на участке автодороги как разность между временем выезда и временем въезда с помощью средства обработки данных, связанного со средствами регистрации факта проезда транспортного средства; определяют среднюю скорость движения транспортного средства на участке автодороги как частное от деления определенной длины участка автодороги на определенное время движения транспортного средства с помощью средства обработки данных; причем длину участка автодороги определяют следующим образом: разбивают участок автодороги на сегменты, причем сегменты включают в себя прямолинейные сегменты и криволинейные сегменты с поворотами автодороги; измеряют длину каждого сегмента, причем длина криволинейных сегментов автодороги измеряется по внутреннему радиусу поворота автодороги; суммируют длины всех сегментов, составляющих участок автодороги.
В дополнительных аспектах раскрывается, что этап, на котором разбивают участок автодороги на сегменты, содержит этапы, на которых находят повороты на участке автодороги; определяют точки начала и конца каждого поворота, принимают эти точки соответственно за начало и конец каждого соответствующего криволинейного сегмента; принимают оставшиеся сегменты прямолинейными;
В других дополнительных аспектах раскрывается, что измеряют длину каждого криволинейного сегмента по внутреннему радиусу поворота автодороги с помощью курвиметра или иного средства, выполненного с возможностью измерять длину криволинейного сегмента; измеряют длину каждого прямолинейного сегмента с помощью лазерного дальномера или иного средства измерения длины по прямой линии; переходят на противоположную сторону дороги при смене направления поворота автодороги; причем переход осуществляют либо в любой точке прямолинейного сегмента, либо в точке начала поворота с иным направлением; переходят на середину дороги при смене направления поворота автодороги; причем переход осуществляют либо в любой точке прямолинейного сегмента, либо в точке начала криволинейного сегмента, содержащего упомянутый поворот автодороги; переходят на противоположную сторону дороги перпендикулярно автодороге, причем для определения перпендикуляра определяют самое короткое расстояние до противоположной стороны автодороги с помощью лазерного дальномера; вдоль края автодороги последовательно ставят, по меньшей мере, три метки на расстоянии L друг от друга и измеряют расстояние по прямой между крайними метками, в случае если измеренное расстояние отличается от 2L менее чем на 0,4%, сегмент считают прямолинейным, в противном случае сегмент считают криволинейным; расстояние L равно 10 м; фиксируют время въезда и время выезда транспортного средства с помощью средств регистрации факта проезда транспортного средства, имеющих временную привязку с системой глобального позиционирования; в качестве средств регистрации факта проезда транспортного средства используют по меньшей мере одно из средств видеофиксации, средств фиксации на основе RFID меток; в качестве средств видеофиксации используют регистраторы.
Краткое описание чертежей.
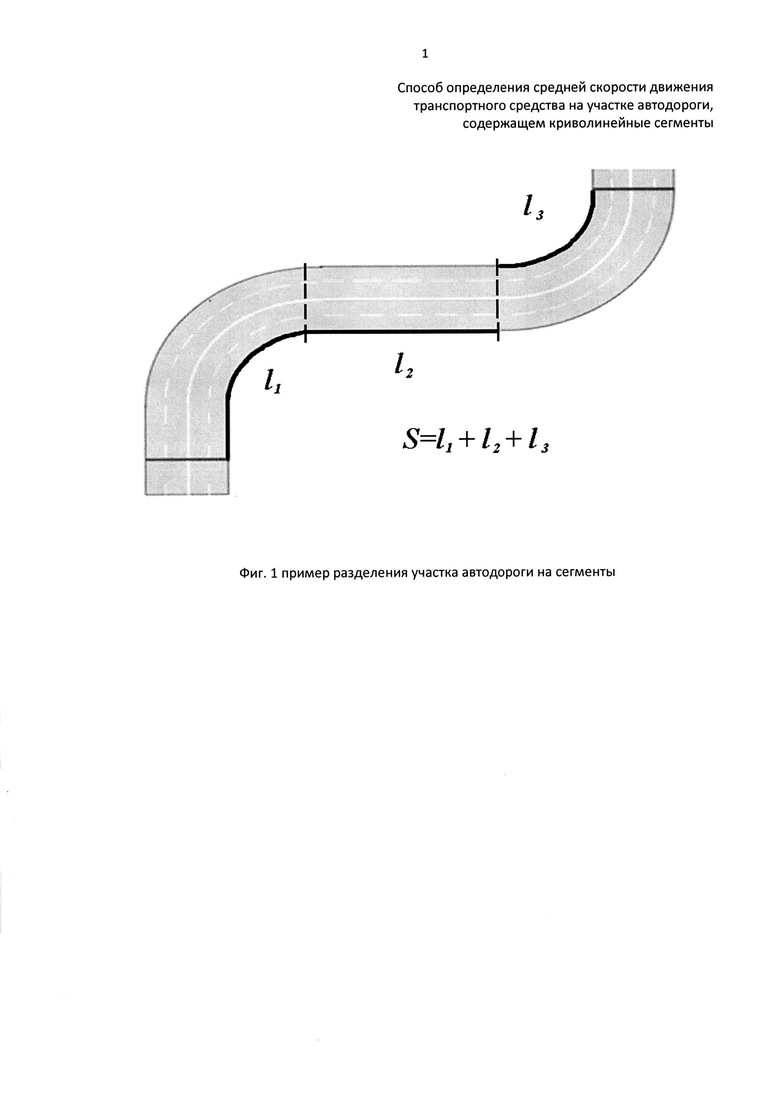
На фиг. 1 представлена схема разделения участка автодороги на сегменты.
Осуществление изобретения.
Существующие системы определения средней скорости работают следующим образом: фиксируют время въезда и время выезда транспортного средства (ТС) на контролируемый участок автодороги, используя соответствующие известные из уровня техники средства, например, видеорегистраторы, находят время движения ТС на участке между двумя видеорегистраторами как разность между временем выезда и временем въезда. Поскольку местоположение регистраторов системе известно, благодаря наличию привязки к системам глобального позиционирования, то на основании известных местоположений система может определить длину пути, пройденного ТС. Обычно эту длину находят как длину прямой между двумя регистраторами. Затем, зная длину пути и время движения ТС на контролируемом участке, находят среднюю скорость ТС как отношение определенной длины пути к измеренному времени.
Такой подход, как правило, приводит к большим погрешностям в случае существенных отличий траекторий реальных дорог от прямолинейных.
Для устранения этих погрешностей был предложен заявляемый способ, сущность которого сводится к более точной оценке пути, пройденного ТС.
Один из вариантов реализации способа заключается в следующем.
1. Выбирают участок автодороги, на котором требуется обеспечить контроль средней скорости движения.
2. Устанавливают устройства фиксации факта проезда в начале и в конце выбранного участка, в качестве которых используются, например, известные в уровне техники регистраторы.
3. Определяют минимальную длину пути, который проходит транспортное средство между началом и концом участка, для этого:
- в случае если на измеряемом участке присутствуют повороты, разбивают участок на криволинейные сегменты, содержащие повороты, и прямолинейные сегменты;
- измеряют длину криволинейных сегментов по внутреннему радиусу каждого поворота с помощью курвиметра или иного средства (например, основанного на обработке фото- или видеоизображений измеряемого сегмента), выполненного с возможностью измерения длины криволинейного сегмента, известного в уровне техники;
- измеряют длину прямолинейных сегментов с помощью одного из лазерного дальномера, рулетки или иного подходящего для этой цели средства;
- измеренные данные передают в средство обработки данных, содержащее блок вычислений;
- с помощью блока вычислений получают общую длину пройденного пути как сумму всех длин измеренных сегментов.
4. Определяют время движения транспортного средства по участку автодороги с помощью устройств фиксации факта проезда, связанных с, по меньшей мере, ГЛОНАСС/GPS-приемником и средством обработки данных, для этого:
- фиксируют время въезда транспортного средства на участок автодороги и время выезда транспортного средства с участка автодороги с помощью регистраторов;
- передают измеренные данные от регистраторов в средство обработки данных, содержащее блок вычислений;
- определяют с помощью блока вычислений время движения транспортного средства на участке автодороги как разность между временем выезда и временем въезда с помощью блока вычислений.
5. Зная время движения транспортного средства и длину пути, рассчитывают среднюю скорость транспортного средства на данном участке с помощью блока вычислений.
6. Все полученные и вычисленные данные накапливаются в средстве обработки данных, из этих данных в дальнейшем формируется база данных, которая также может быть использована для различных статистических исследований и/или анализа дорожного движения.
На фиг. 1 показано примерное разбиение участка автодороги на сегменты. Символом S обозначена длина участка автодороги, символами I1, I2, I3 обозначены сегменты, составляющие участок.
Первый сегмент представляет собой правый поворот, второй сегмент прямолинейный, третий сегмент представляет собой левый поворот.
В реальных условиях может быть сложно найти точку перехода криволинейного сегмента (поворота) в прямолинейный сегмент. Однако довольно просто определить сам факт наличия поворота в ту или иную сторону, то есть при разбитии участка автодороги на сегменты (прямолинейные и криволинейные) сложность может быть только лишь в определении точки начала и завершения поворота.
Понятно, что на фиг. 1 точка начала первого поворота - это точка начала участка автодороги, на котором ведется регистрация дорожного движения, точка конца последнего поворота - это точка конца участка автодороги, на котором ведется регистрация дорожного движения.
Точку, в которой первый поворот переходит в прямолинейный сегмент, и точку, в которой прямолинейный сегмент переходит в левый поворот, требуется определить.
Для этого предлагается использовать следующую методику.
Вдоль края дороги на расстоянии L друг от другу ставят три метки M1, M2, M3; измеряют расстояние по прямой между первой (M1) и третьей (M3) метками, в случае если измеренное расстояние между крайними метками (M1-M3) отличается от 2L менее чем на 0,4%, отрезок между метками M1-M3 считают прямолинейным, иначе считают криволинейным. Далее передвигают метку M1 по краю дороги за метку M3 на расстояние L, снова измеряют расстояние по прямой между двумя крайними метками и согласно вышеизложенной методике снова определяют, прямолинейный отрезок автодороги или криволинейный.
Когда определенный отрезок меняется с прямолинейного на криволинейный или наоборот, среднюю метку принимают за точку завершения одного сегмента и начала другого.
Таким образом могут быть найдены все точки начала и завершения сегментов.
Величина L может быть выбрана исходя из особенностей автодороги, в предпочтительном варианте осуществления L=10 м. Однако в случае протяженных прямолинейных участков или затяжных поворотов эта длина может увеличиваться.
Выбор длины L может также определяться наличием на участке автодороги подъемов и спусков, очевидно, чем меньше L относительно длины отрезка дороги с подъемом или спуском, тем выше точность определения длины этого отрезка.
Величина 0,4% может быть выбрана большей или меньшей в зависимости от внешних условий, очевидно, что чем большее отклонение допускается от величины 2L тем меньше отклонений от прямой фиксируется.
Поскольку согласно предложенному способу требуется измерять длину криволинейных сегментов автодороги по внутреннему радиусу поворота автодороги, то, очевидно, при смене направления поворота следует осуществлять переход на другую сторону дороги.
В случае наличия прямолинейного сегмента между двумя криволинейными сегментами с поворотами в разные стороны переход на другую сторону можно совершить в любой точке перпендикулярно дорожному полотну.
Поскольку может быть сложно с высокой точностью определить перпендикулярное направление на многополосной автодороге, то предложено использовать для определения перпендикуляра лазерный дальномер. Суть методики сводится к осуществлению множества измерений ширины автодороги и осуществлению перехода по траектории соответствующей измерению с наименьшим значением.
Переход на другую сторону автодороги в случае двух следующих друг за другом сегментов с поворотами в разные стороны осуществляется в точке завершения одного сегмента и начала другого, которую определили, когда участок разбивали на сегменты. В этом случае перпендикуляр к дорожному полотну также может быть определен вышеуказанным способом.
Необходимо отметить, что в одном из вариантов осуществления переход может быть осуществлен не на другую сторону дороги, а на середину дороги. Очевидно, что проще и безопаснее осуществлять измерение расстояния на обочине, а не в крайней левой полосе автодороги, однако в некоторых случаях это целесообразно (например, если имеется широкая разделительная полоса), так как повышает точность регистрации нарушений скоростного режима.
В одном из вариантов осуществления для регистрации факта проезда используются регистраторы на основе обработки визуальной информации - видеорегистраторы, однако в рамках заявленного способа возможно использование и регистраторов, работающих на основе RFID меток, закрепленных в номерах автомобилей.
Система, реализующая заявленный метод, состоит из средства обработки, например сервера, соединенного с регистраторами, установленными на контролируемом участке автодороги и связанными с системой глобального позиционирования (ГЛОНАСС или GPRS). Регистраторы фиксируют въезд ТС в начале контролируемого участка автодороги и выезд ТС в конце контролируемого участка автодороги, с помощью системы глобального позиционирования регистраторы определяют моменты времени въезда и выезда и передают эти данные на сервер. Сервер, имея данные об оценке длины пути пройденного ТС и определив время движения ТС по участку автодороги, вычисляет среднюю скорость движения ТС по участку автодороги, сравнивает с разрешенной скоростью и определяет факт нарушения скоростного режима. Далее эта информация передается в серверы соответствующих госорганов, ответственных за обеспечение безопасности дорожного движения.
В системе могут использоваться регистраторы на базе RFID меток, контроль времени въезда и выезда может осуществляться без привязки к системам глобального позиционирования, что не относится к сущности заявленного изобретения.
Варианты осуществления не ограничиваются описанными здесь вариантами осуществления, специалисту в области техники на основе информации изложенной в описании и знаний уровня техники станут очевидны и другие варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Способы, раскрытые здесь, содержат один или несколько этапов или действий для достижения описанного способа. Этапы и/или действия способа могут заменять друг друга, не выходя за пределы объема формулы изобретения. Другими словами, если не определен конкретный порядок этапов или действий, порядок и/или использование конкретных этапов и/или действий может изменяться, не выходя за пределы объема формулы изобретения.
В заявке не указано конкретное программное и аппаратное обеспечение для реализации блоков и средств, но специалисту в области техники должно быть понятно, что сущность изобретения не ограничена конкретной программной или аппаратной реализацией, и поэтому для осуществления изобретения могут быть использованы любые программные и аппаратные средства, известные в уровне техники. Так аппаратные средства могут быть реализованы в одной или нескольких специализированных интегральных схемах, цифровых сигнальных процессорах, устройствах цифровой обработки сигналов, программируемых логических устройствах, программируемых пользователем вентильных матрицах, процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных модулях, выполненных с возможностью осуществлять описанные в данном документе функции, компьютере либо комбинации вышеозначенного.
Хотя отдельно не упомянуто, но очевидно, что, когда речь идет о хранении данных, программ и т.п., подразумевается наличие машиночитаемого носителя данных, примеры машиночитаемых носителей данных включают в себя постоянное запоминающее устройство, оперативное запоминающее устройство, регистр, кэш-память, полупроводниковые запоминающие устройства, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD), а также любые другие известные в уровне техники носители данных.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать более широкое изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку различные другие модификации могут быть очевидны специалистам в соответствующей области.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СРЕДНЕЙ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606521C1 |
| УСТРОЙСТВО И СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2736930C1 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ДОРОЖНОЙ ОБСТАНОВКИ | 2020 |
|
RU2749527C1 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ОБЪЕКТОВ В ОБЛАСТИ АВТОДОРОГИ | 2021 |
|
RU2770145C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2496143C1 |
| Способ и система контроля нарушения скоростного режима автотранспортным средством на основе технологии радиочастотных меток | 2016 |
|
RU2648648C2 |
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2007 |
|
RU2384887C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486597C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОДОРОГАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2368722C2 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2488171C1 |
Изобретение относится к области контроля движения дорожного транспорта, а именно к способам определения скорости движения транспортного средства (ТС) на участке автодороги, содержащем криволинейные сегменты. Способ содержит этапы, на которых определяют длину участка автодороги, фиксируют время въезда и выезда ТС, определяют время движения ТС на участке автодороги, определяют среднюю скорость движения ТС на участке автодороги. Длина участка автодороги определяется разбиванием участка автодороги на сегменты, причем сегменты включают в себя прямолинейные сегменты и криволинейные сегменты с поворотами автодороги. Измеряют длину каждого сегмента, причем длина криволинейных сегментов автодороги измеряется по внутреннему радиусу поворота автодороги. Суммируют длины всех сегментов, составляющих участок автодороги. Достигается снижение вероятности пропуска нарушений скоростного режима транспортным средством на участке автодороги, содержащем криволинейные сегменты, при соблюдении принципа лояльности к автомобилистам. 7 з.п. ф-лы, 1 ил.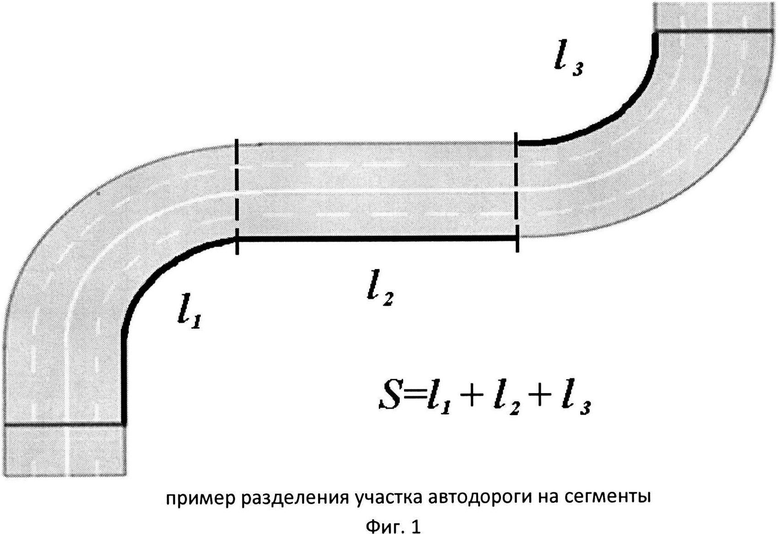
1. Способ определения средней скорости движения транспортного средства на участке автодороги, содержащем криволинейные сегменты, содержащий этапы, на которых:
- определяют длину участка автодороги;
- фиксируют время въезда транспортного средства на участок автодороги и время выезда транспортного средства с участка автодороги с помощью средств регистрации факта проезда транспортного средства;
- определяют время движения транспортного средства на участке автодороги как разность между временем выезда и временем въезда с помощью средства обработки данных, связанного со средствами регистрации факта проезда транспортного средства;
- определяют среднюю скорость движения транспортного средства на участке автодороги как частное от деления определенной длины участка автодороги на определенное время движения транспортного средства с помощью средства обработки данных;
причем длину участка автодороги определяют следующим образом:
- разбивают участок автодороги на сегменты, причем сегменты включают в себя прямолинейные сегменты и криволинейные сегменты с поворотами автодороги;
- измеряют длину каждого сегмента, причем длина криволинейных сегментов автодороги измеряется по внутреннему радиусу поворота автодороги;
- суммируют длины всех сегментов, составляющих участок автодороги,
причем этап, на котором разбивают участок автодороги на сегменты, содержит этапы, на которых
- находят повороты на участке автодороги;
- определяют точки начала и конца каждого поворота, принимают эти точки соответственно за начало и конец каждого соответствующего криволинейного сегмента;
- принимают оставшиеся сегменты прямолинейными;
причем этап, на котором определяют точки начала и конца каждого поворота, содержит этапы, на которых
вдоль края автодороги последовательно ставят по меньшей мере три метки на расстоянии L друг от друга и измеряют расстояние по прямой между крайними метками, причем в случае если измеренное расстояние отличается от 2L менее чем на 0,4%, сегмент считают прямолинейным, в противном случае сегмент считают криволинейным.
2. Способ по п. 1, в котором этап, на котором измеряют длину каждого сегмента, содержит этапы, на которых
- измеряют длину каждого криволинейного сегмента по внутреннему радиусу поворота автодороги с помощью курвиметра или иного средства, выполненного с возможностью измерять длину криволинейного сегмента;
- измеряют длину каждого прямолинейного сегмента с помощью лазерного дальномера или иного средства измерения длины по прямой линии.
3. Способ по п. 1, в котором этап, на котором измеряют длину каждого сегмента, содержит этап, на котором переходят на противоположную сторону дороги при смене направления поворота автодороги; причем переход осуществляют либо в любой точке прямолинейного сегмента, либо в точке начала поворота с иным направлением.
4. Способ по п. 1, в котором этап, на котором измеряют длину каждого сегмента содержит этап, на котором переходят на середину дороги при смене направления поворота автодороги; причем переход осуществляют либо в любой точке прямолинейного сегмента, либо в точке начала криволинейного сегмента, содержащего упомянутый поворот автодороги.
5. Способ по п. 3 или 4, в котором этап, на котором измеряют длину каждого сегмента, содержит этапы, на которых переходят на противоположную сторону дороги перпендикулярно автодороге, причем для определения перпендикуляра определяют самое короткое расстояние до противоположной стороны автодороги с помощью лазерного дальномера.
6. Способ по п. 1, в котором расстояние L равно 10 м.
7. Способ по п. 1, в котором фиксируют время въезда и время выезда транспортного средства с помощью средств регистрации факта проезда транспортного средства, имеющих временную привязку с системой глобального позиционирования.
8. Способ по п. 1, в котором в качестве средств регистрации факта проезда транспортного средства используют по меньшей мере одно из средств видеофиксации, средств фиксации на основе RFID меток.
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2488171C1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ПОВОРОТЕ | 2009 |
|
RU2407032C1 |
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| Трасса автомобильной или железной дороги | 1990 |
|
SU1838495A3 |
| ТРАССА АВТОМОБИЛЬНОЙ ДОРОГИ | 2001 |
|
RU2202022C2 |
| "Указания по разметке автомобильных дорог, ВСН 23-75", 1976 | |||
| СПОСОБ ИДЕНТИФИКАЦИИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440619C1 |
| Устройство для отбора и перевалки смеси шерсти из постели | 1948 |
|
SU75768A1 |
| EA 201101122 A1, 30.01.2013. | |||

