Настоящее изобретение относится к системе управления и позиционирования для обозначения взаимного расположения сменного элемента футеровки от износа и предварительно определенного монтажного положения на поверхности, сформированной на внутренней поверхности подверженной износу стенки, например, в оборудовании, осуществляющем манипуляции с дробленой рудой или каменным материалом в соответствии с вводной частью п.1 формулы изобретения. В альтернативном исполнении данное изобретение делает возможным осуществление также такой замены футеровки от износа посредством дистанционного управления и двусторонней связи через Интернет.
Подверженная износу стенка, такая как кожух измельчающего барабана, используемого во время дробления и обогащения руды, является покрытой на подверженной износу внутренней поверхности футеровкой от износа из, например, эластомерного материала. Эта футеровка от износа обычно крепится посредством винтового соединения к поверхности цилиндрического листового металла кожуха, формирующего вращающийся барабан дробилки. Футеровка от износа измельчающего барабана является сформированной из множества элементов футеровки от износа, расположенных близ друг друга в секциях, причем элементы являются соединенными с внутренней поверхностью барабана с помощью средств соединения в форме, например, болтов, проходящих через монтажные отверстия, выполненные в листовом металле кожуха барабана. Поскольку элементы футеровки от износа являются размещенными в положении со стороны подверженной износу стенки кожуха, но крепятся через соединительные отверстия с противоположной стороны поверхности кожуха, известной как «поверхность натяжения», возникают значительные проблемы во время подгонки каждого отдельного элемента футеровки от износа так, чтобы средства соединения элемента футеровки от износа, которые в своей простейшей форме могут включать в себя обычные соединительные отверстия в элементе футеровки от износа, располагались по центру относительно каждого соединительного отверстия в кожухе до того, как элемент футеровки от износа опускается на место. Элементы футеровки от износа являются очень тяжелыми и требуют подъемных средств, таких как стрелы кранов, манипуляторы или подобное этому, для осуществления манипуляций с элементами футеровки от износа внутри барабана. Измельчающие барабаны этого типа обычно находятся в работе 24 часа в сутки, а это означает, что футеровка подвергается очень сильному износу и ее замена должна осуществляться достаточно часто. При замене футеровки элементы футеровки поднимаются в барабан с одного конца и помещаются на опорной поверхности на внутренней поверхности кожуха. Даже если оператор крана является опытным, сама подгонка элементов футеровки от износа на поверхность кожуха является затратной по времени и опасной работой, особенно, если элементы футеровки от износа принадлежат к типу, который использует элементы, известные как «сквозные болты» и гайки. Замена футеровки барабана, помимо всего прочего, является дорогой по причине того факта, что она обычно предполагает длительные остановки производства.
Известны различные типы подъемного и манипуляционного оборудования, такие как подъемные краны, предназначенные для облегчения замены футеровок барабанов. Такое манипуляционное оборудование обычно содержит подъемное устройство, такое как стрела или подъемный кран, которым можно маневрировать внутри измельчающего барабана, и которое обеспечивается на своем свободном конце захватывающим устройством, с помощью которого элемент футеровки от износа может захватываться и поддерживаться в удерживающем положении. С помощью подъемного крана захватывающее устройство и, таким образом, элемент футеровки может перемещаться по существу свободно в пространстве или с, по меньшей мере, двумя или тремя степенями свободы поступательного движения в пространстве, то есть в направлениях x, y и z, и с помощью некоторого количества вращательных степеней свободы обычно может осуществляться управление его углом наклона, например, углом бокового наклона, углом продольного наклона и углом скольжения захватывающего устройства. [Пропущенный текст: «Это может быть описано как»] первый угол α, определяемый в плоскости xy, второй угол β, определяемый в плоскости yz, и третий угол γ, определяемый в плоскости xz. Количество степеней свободы способной к маневрированию стрелы может варьироваться в зависимости от конкретного исполнения подъемного устройства. Маневрирование подъемным устройством обычно осуществляется с помощью оператора, сопровождающего подъемное устройство или присутствующего в его непосредственной близости и управляющего им с помощью блока управления.
Как было упомянуто выше, одной из основных проблем при замене футеровок барабанов является сложность позиционирования и подгонки каждого отдельного элемента футеровки от износа так, чтобы его средства соединения располагались в центре соединительных отверстий, выполненных в стенке барабана, прежде чем элемент футеровки от износа мог быть опущен на место, и соединительные элементы применены так, чтобы стало возможным присоединение футеровки от износа с помощью вспомогательного средства соединения. Упомянутое вспомогательное средство соединения обычно является представленным посредством системы болтовых соединений, посредством которых элемент футеровки от износа помещается с натяжением на внутренней поверхности измельчающего барабана через посредство винтов, вставляемых через существующие соединительные отверстия в элементах и далее выходящих из монтажных отверстий в измельчающем барабане, благодаря чему винты удерживаются на месте посредством гаек на внешней поверхности (поверхности натяжения) измельчающего барабана. [Пропущено «В»] документе SE 531 347 C2, однако, описывается новая техника монтажа, в которой элементы футеровки от износа являются оснащенными резьбовыми отверстиями с ассоциированными направляющими штифтами. Таким образом, гайки не требуются. Соединение достигается посредством болтов (таких, как винты), вставляемых через монтажные отверстия от внешней поверхности измельчающего барабана (поверхности натяжения). Во время монтажа элементов футеровки от износа обычным случаем является, когда оператор крана через радиосвязь или схожим образом находится в состоянии беспроводной связи с персоналом, находящимся вблизи от назначенного местоположения монтажа элемента футеровки от износа или от опорной поверхности на стенке. Оператор крана принимает команды и информацию относительно того, как должен быть ориентирован элемент футеровки от износа, чтобы монтажные отверстия элемента футеровки от износа были расположены на одной линии и по центру монтажных отверстий стенки. В целях обеспечения информации, требуемой для обеспечения оператору крана возможности сведения вместе вспомогательных средств соединения в монтажных отверстиях элемента футеровки от износа, персонал должен находиться в опасной близости от местоположения монтажа и, в определенных случаях, под элементом футеровки от износа, свисающим со стрелы крана. Следует осознавать, что эта операция является крайне рискованной хотя бы потому, что секции футеровки от износа, чья замена осуществляется, обычно являются очень тяжелыми.
Первой целью настоящего изобретения является обеспечение системы управления и позиционирования, решающей проблемы, описанные выше, и делающей возможным выполнение способом, являющимся более безопасным для персонала и более действенным, замены изношенных футеровок барабанов на подверженных износу стенках, в частности, для вращающихся барабанных мельниц. Особое стремление направлено на обеспечение системы управления и позиционирования, обеспечивающей персоналу отсутствие необходимости работы под стрелой крана, с которого свисают секции футеровки, как было описано выше. Это достигается через посредство системы управления и позиционирования, демонстрирующей признаки и характеристики, специфицированные в п. 1 формулы изобретения.
Второй целью настоящего изобретения является обеспечение системы, делающей возможным выполнение обновления и замены футеровок от износа без необходимости для оператора крана присутствовать на месте операции с футеровкой.
Благодаря выполнению двумерного датчика на внешней поверхности стенки, то есть на противоположной стороне стенки, видимой со стороны износа монтажной поверхности, таким способом, чтобы поле обзора датчика содержало нижнюю сторону элемента футеровки от износа, видимую через монтажные отверстия, а также благодаря выполнению датчика с возможностью излучения электрического сигнала, представляющего изображение взаимного расположения первой опорной системы Rv, представленной посредством монтажных отверстий стенки, и второй опорной системы, представленной посредством средств соединения, расположенных на нижней поверхности элемента футеровки от износа, которая может, конечно, также включать в себя обычные монтажные отверстия, возможным является определение монтажного положения элемента футеровки от износа простым и действенным способом, и, таким образом, направление элемента футеровки от износа в его местоположение монтажа на стенке.
Является целесообразным, чтобы двумерный датчик содержал две передающие изображения камеры, выполненные стационарно относительно первой опорной системы Rv, так чтобы линии видимости от внешней поверхности кожуха барабана этих датчиков проходили через монтажные отверстия измельчающего барабана. Компонентом системы является блок обработки изображений, причем блок осуществляет преобразование сигнала в двумерное или трехмерное представление на блоке отображения, с помощью которого оператору крана в режиме реального времени может быть представлена информация о положении так, чтобы оператор крана мог направлять и осуществлять маневрирование подъемным устройством и таким способом приводить элемент футеровки от износа в его монтажное положение на стенке. Оператор крана может таким способом видеть «поле обзора камеры» и, таким образом, через посредство приема информации в режиме реального времени может обозревать нижнюю поверхность элемента футеровки от износа на мониторе посредством использования прямой информации от блока отображения с целью точного позиционирования элемента футеровки от износа на его место на опорной поверхности внутренней поверхности измельчающего барабана так, чтобы средства соединения, присутствующие на нижней поверхности элемента футеровки от износа, располагались по центру в соответствующем монтажном отверстии в стенке.
В альтернативном исполнении, является возможным, чтобы фактическая процедура направления или позиционирования могла происходить автоматически на основе информации, принимаемой от блока обработки изображений системы, посредством чего особо ответственные операции во время замены футеровок от износа могут быть автоматизированными. Когда оператора крана удовлетворяет положение, посредством нажатия кнопки на блоке управления активируется функция позиционирования. Камера далее осуществляет захват изображения крестика на панели и вычисляет положение его центра и его расстояние с помощью лазерного пучка, посредством чего микропроцессор вычисляет известным способом требуемые данные и направляет подъемное устройство и, таким образом, также элемент футеровки от износа, на место. В одном другом исполнении является возможным, чтобы информация, касающаяся положений средств соединения относительно монтажных отверстий, в качестве дополнения к чисто визуальной информации, которую оператор крана принимает от изображений в мониторе, может быть тактильной или может быть аудиовизуальной, при которой изображение, отображаемое на мониторе, соответствует тактильной или аудиовизуальной информации.
Одно из основных преимуществ настоящей системы управления и позиционирования заключается в том, что значительно облегчается выравнивание элемента футеровки от износа с монтажными отверстиями опорной поверхности, и, в частности, посредством этого исчезает необходимость для персонала присутствовать в непосредственной близости от элемента футеровки от износа во время фактической работы по выравниванию и позиционированию. Все позиционирование может осуществляться с высокой точностью на безопасном расстоянии от места монтажа. В качестве альтернативного варианта, для оператора крана может быть возможной работа с использованием дистанционного управления и блока внешней связи в системе, в которой передача данных осуществляется в двух направлениях через, например, Интернет или сеть WLAN, посредством чего является целесообразным, чтобы один единичный опытный оператор крана мог осуществлять управление одним или несколькими подъемными устройствами или манипуляторами для манипулирования элементами футеровки от износа из значительно удаленного местоположения. Снижение затрат и увеличение эффективности, которые могут быть получены в последнем случае, являются очевидными, поскольку для опытного оператора крана отсутствует необходимость перемещаться на место, такое как шахта, где, например, расположена дробилка руды, но вместо этого появляется возможность осуществлять маневрирование подъемным устройством беспроводным способом из удаленного терминала.
Ниже будет более детально описан один вариант осуществления изобретения со ссылкой на прилагаемые чертежи, в которых:
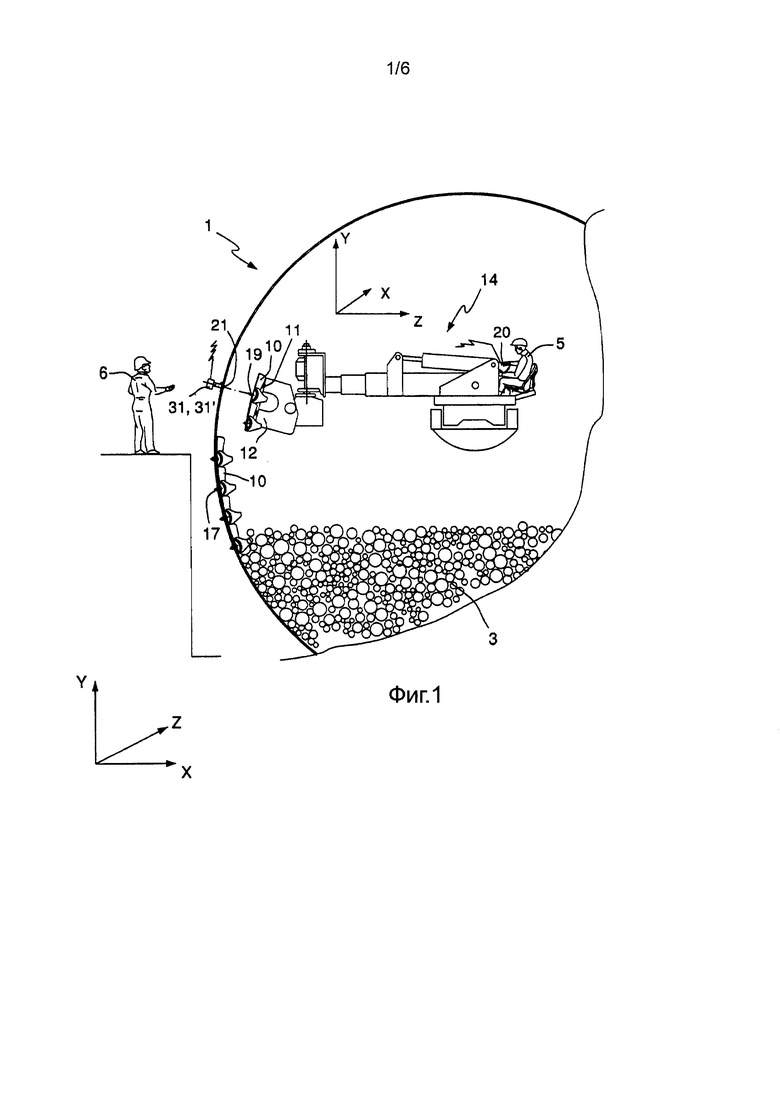
фиг. 1 демонстрирует вид в поперечном сечении части обычной дробильной установки с выполненным в этой установке подъемным устройством, причем в подъемном устройстве в целях позиционирования элемента футеровки от износа оператор использует систему управления и позиционирования в соответствии с настоящим изобретением;
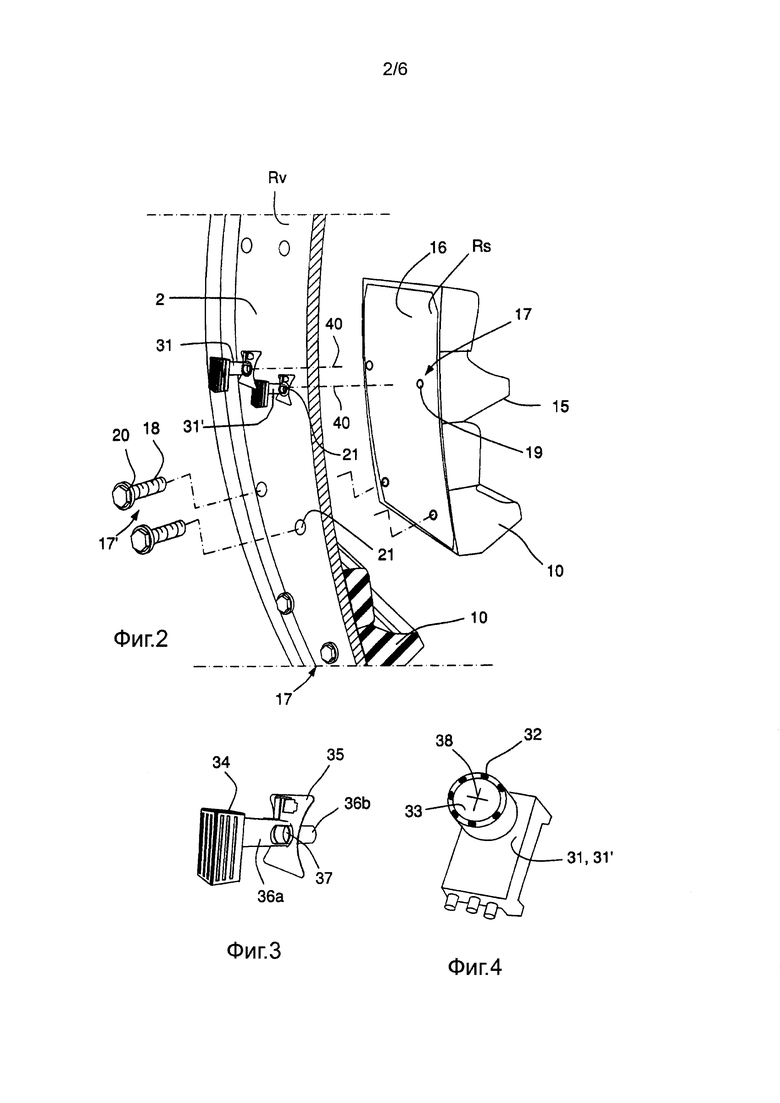
фиг. 2 демонстрирует изображение в разобранном виде в перспективе части измельчающего барабана с системой управления и позиционирования в соответствии с настоящим изобретением во время позиционирования элемента футеровки от износа на опорной поверхности внутренней поверхности барабана, то есть подверженной износу, а также монтаж элемента футеровки от износа с помощью соединительных болтов, которые, проходя через монтажные отверстия в кожухе измельчающего барабана, предназначены быть закрепленными с внешней поверхности барабана, то есть поверхности, известной как «поверхность натяжения»;
фиг. 3 демонстрирует вид в перспективе защитного корпуса для камеры для записи изображений и источника освещения, являющегося компонентом системы управления и позиционирования в соответствии с настоящим изобретением;
фиг. 4 демонстрирует вид в перспективе цифровой камеры для записи изображений с ее ассоциированным источником освещения в форме светодиодов LED, распределенных вокруг объектива камеры и являющихся компонентами системы управления и позиционирования в соответствии с настоящим изобретением;
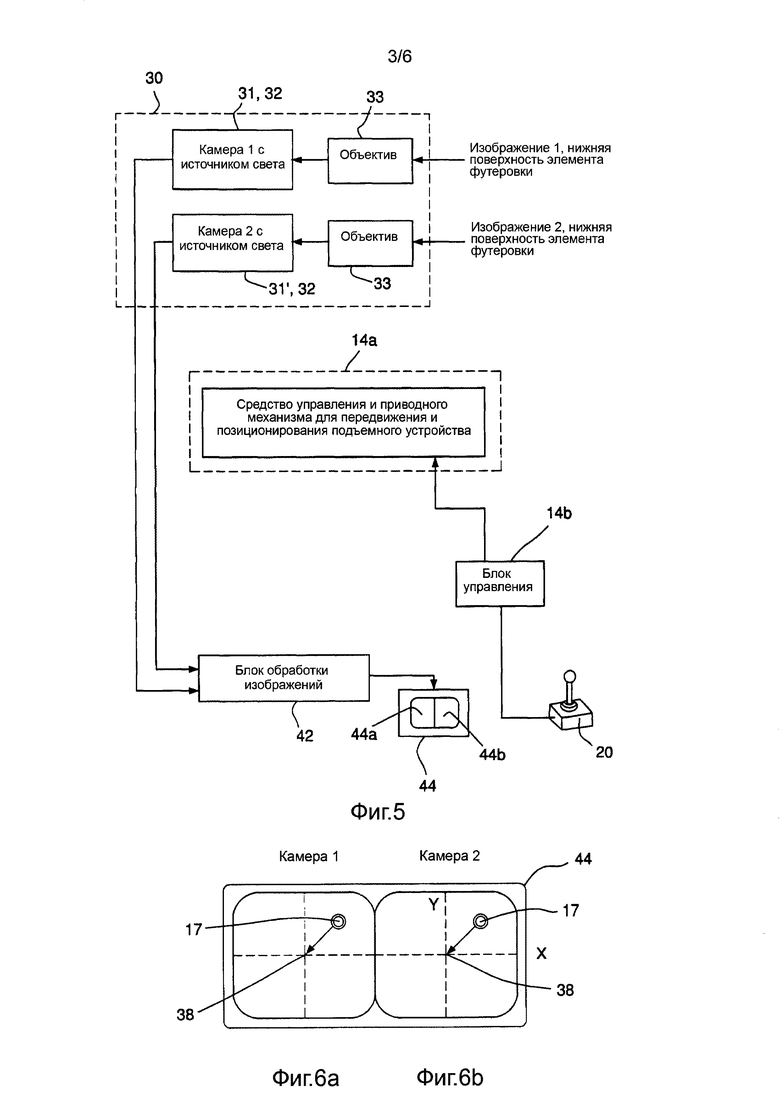
фиг. 5 демонстрирует структурную диаграмму системы управления и позиционирования в соответствии с настоящим изобретением, предназначенной к использованию на подъемном устройстве для манипулирования элементами футеровки от износа в целях облегчения замены футеровки от износа в способном к вращению измельчающем барабане;
фиг. 6a и фиг. 6b демонстрируют компьютерные изображения так, как их видит оператор крана, и разделенные на сеансы с использованием системы DualScreen, в которой каждое изображение было создано соответственно посредством первой и второй камер для записи изображений, которые являются компонентами системы управления и позиционирования в соответствии с настоящим изобретением;
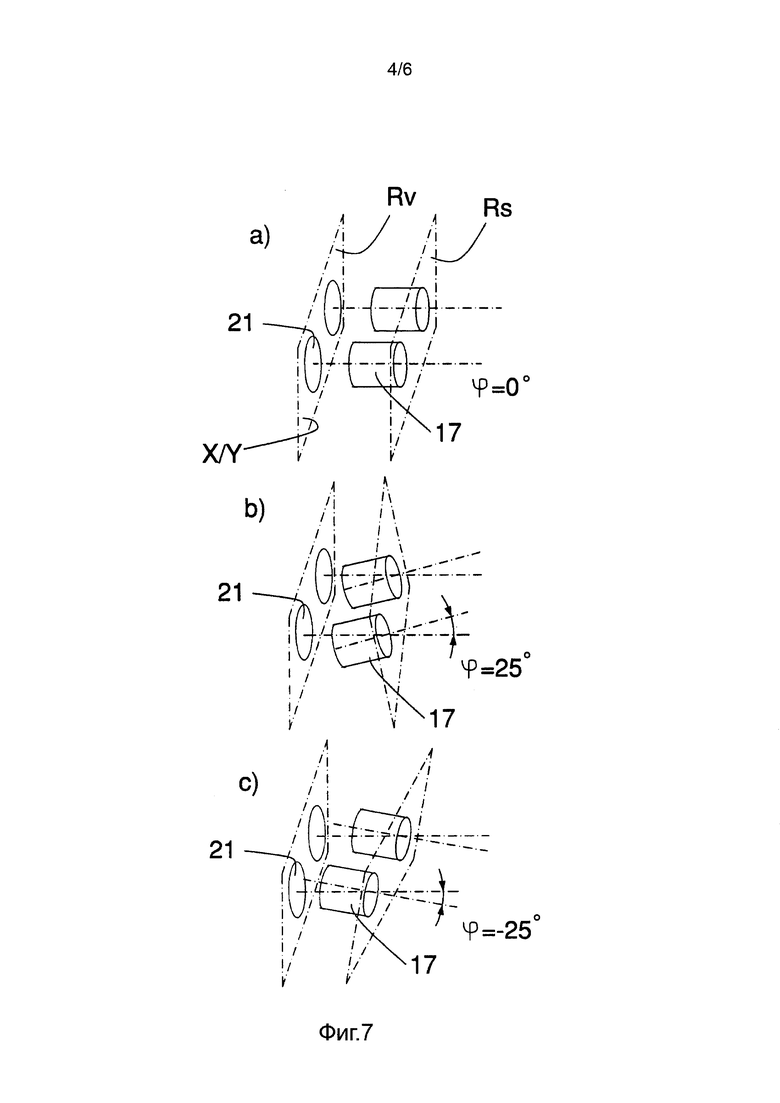
фиг. 7a по фиг. 7c схематически демонстрируют в одном примере взаимно различные угловые положения, которые могут возникать между двумя монтажными отверстиями, включенными в фиксированную первую опорную систему Rv, определяемую посредством стенки кожуха (плоскость X/Y) измельчающего барабана, и двумя средствами соединения, являющимися компонентами подвижной второй опорной системы Rs, определяемой посредством элемента футеровки от износа, над которым осуществляются манипуляции посредством подъемного устройства, посредством чего:
a) два средства соединения элемента футеровки от износа размещаются своими продольными осями перпендикулярно к плоскости X/Y,
b) два средства соединения элемента футеровки от износа размещаются своими продольными осями под углом 25° к плоскости X/Y, и
c) два средства соединения элемента футеровки от износа размещаются своими продольными осями под углом -25° к плоскости X/Y;
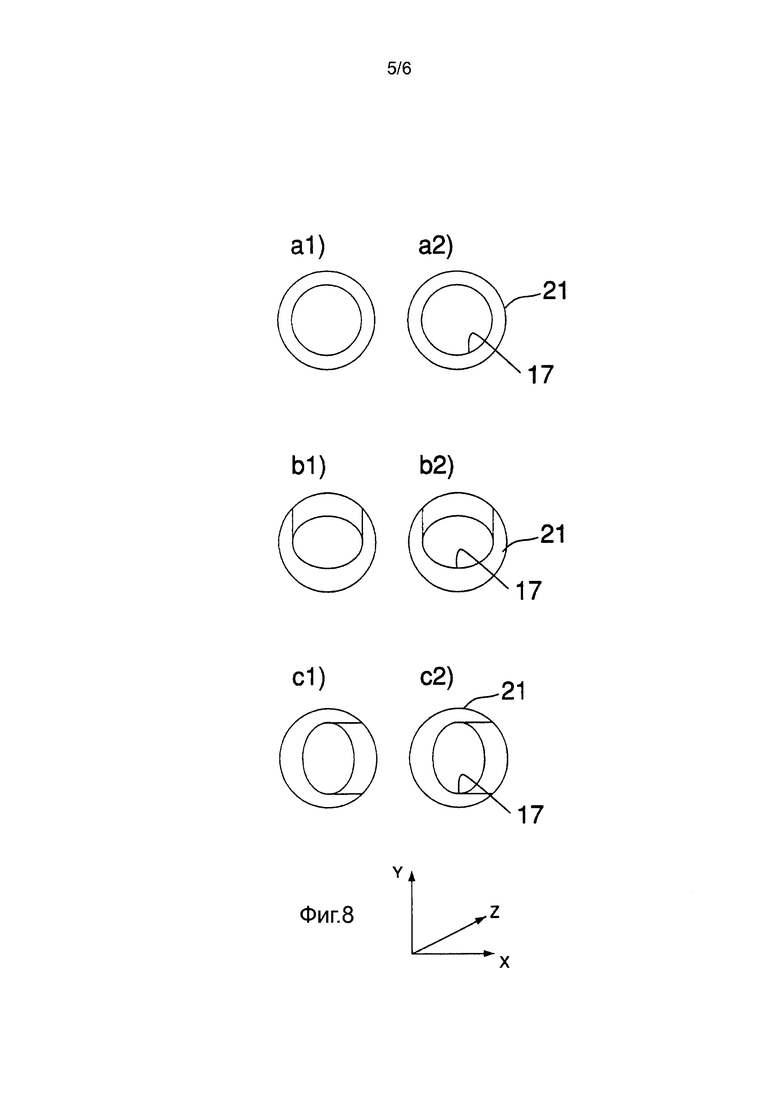
фиг. 8a по фиг. 8c схематически демонстрируют пример того, как может появляться графическое двумерное изображение, то есть сеансы со структурой DualScreen, представляемые оператору крана посредством монитора при различных условиях углового положения между двумя из монтажных отверстий стенки кожуха и двумя из противоположных средств соединения элемента футеровки от износа, соответствующих фиг. 7a по фиг. 7c, посредством чего:
a) средства соединения располагаются по центру в монтажных отверстиях, то есть средства соединения являются перпендикулярными плоскости X/Y,
b) средства соединения располагаются наклонно под углом к монтажным отверстиям, то есть средства соединения находятся под углом 25° к плоскости X/Y,
c) средства соединения располагаются наклонно под углом к монтажным отверстиям, то есть средства соединения находятся под углом -25° к плоскости X/Y;
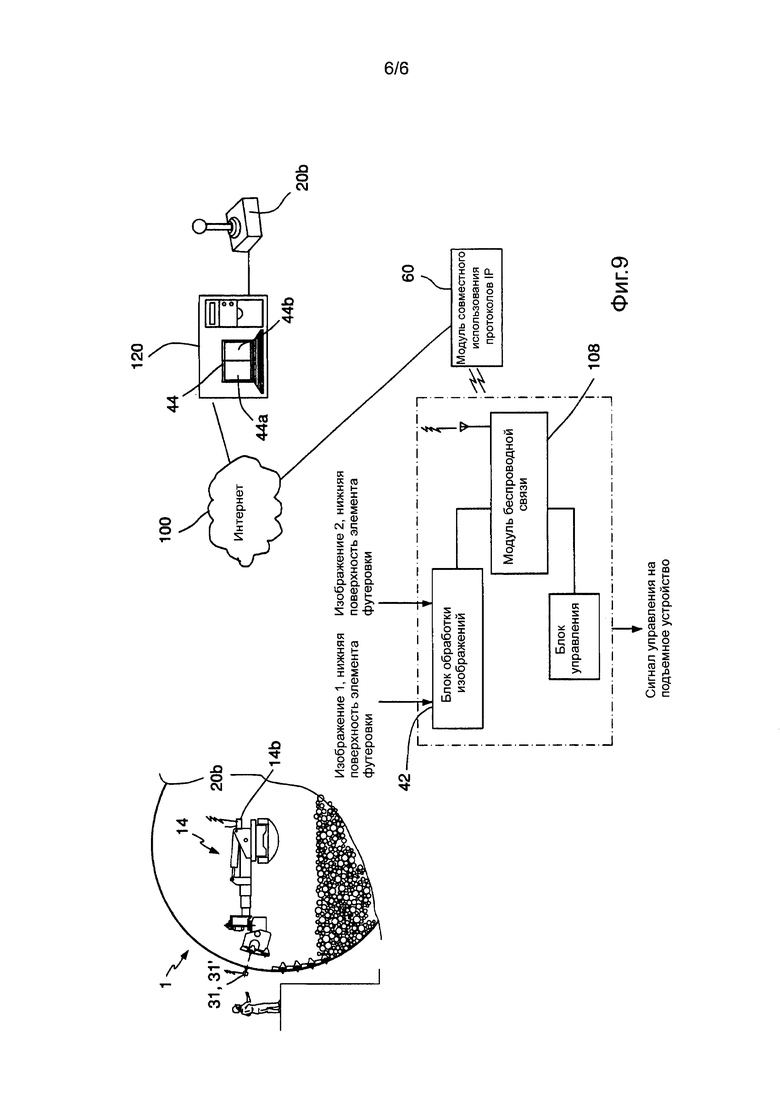
фиг. 9 демонстрирует систему для операции дистанционного управления, выполняемой крановым устройством, которая при выполнении замены футеровки от износа в дробилке использует геометрическую информацию в целях определения размера угловых положений между различными опорными системами Rv, Rs в системе управления и позиционирования в соответствии с настоящим изобретением.
Фиг. 1 демонстрирует поперечное сечение части обычного измельчающего барабана 1 с окружающей стенкой в форме кожуха 2 из листового металла, который является подверженным износу, причем использование измельчающего барабана осуществляется во время дробления и помола руды 3 в дробилке руды. Первый оператор 5, оператор крана, располагается внутри барабана, в то время как второй оператор 6 располагается снаружи барабана. Данный оператор 5 и данный оператор 6 могут осуществлять друг с другом связь беспроводным способом посредством, например, мобильного телефона или радиосвязи. Внутренняя футеровка барабана на барабанной мельнице 1 упомянутого типа формируется из множества элементов 10 футеровки от износа, известных как «пластины кожуха», расположенных рядом друг с другом. Каждый элемент 10 футеровки от износа имеет подъемные проушины 1, выполненные для взаимодействия с крюковым захватом 12, расположенным на свободном конце подъемного устройства 14, которое было вставлено в измельчающий барабан 1. Элемент 10 футеровки от износа демонстрирует верхнюю поверхность 15, обращенную внутрь в направлении центра измельчающего барабана 1, изготовленную из материала, устойчивого к износу, такого как, например, износостойкая резина, и нижнюю поверхность 16 из металла, соединенную посредством вулканизации с упомянутой износостойкой резиной.
Поскольку дробилки руды рассматриваемого типа обычно работают круглосуточно, замена элементов 10 футеровки от износа должна осуществляться с регулярными интервалами. Для этой цели элементы 10 футеровки от износа являются оснащенными средствами соединения, обычно обозначаемыми позицией 17, которые в описываемом здесь варианте осуществления содержат резьбовые отверстия 19 с ассоциированными направляющими штифтами, которые могут раскрепляться. Опорное обозначение 17' обычно используется для обозначения вспомогательных средств соединения, назначенных для монтажа, причем средства являются представленными элементами, известными как «болтовые соединения», в форме винтов 18, обеспечиваемых с головкой 20 и назначенных вставляться от внешней поверхности кожуха барабана через монтажные отверстия 21 в кожухе 2 из листового металла измельчающего барабана 1, чтобы ввинчиваться на место в резьбовых отверстиях 19 в элементе футеровки от износа. Таким образом, эта система соединения, по существу, представляет собой систему типа, известного из документа SE 531 347 C2.
Здесь следует понимать, что выражение «средства 17 соединения» используется для обозначения какого-либо любого известного типа из средств соединения, которыми может быть оснащен элемент 10 футеровки от износа, то есть не только резьбовых отверстий с ассоциированными направляющими штифтами типа, описанного в данном варианте осуществления, а также в упомянутом выше документе, но также более простых систем типа «винт-гайка», известного как «сквозные болты», посредством которых элементы футеровки от износа обеспечиваются вместе с простыми монтажными отверстиями.
Элементы 10 футеровки от износа располагаются по центру относительно монтажных отверстий 21 в кожухе 2 из листового металла, после чего они крепятся к поверхности на внутренней поверхности кожуха ввинчиванием посредством упомянутых винтов 18 от внешней поверхности кожуха 2 из листового металла, то есть от поверхности, известной как «поверхность натяжения». Этот тип элемента 10 футеровки от износа является очень тяжелым и трудным для манипулирования, и, даже если оператор крана, то есть первый оператор 5 на чертеже, является квалифицированным, существуют большие сложности в позиционировании и подгонке каждого отдельного элемента 10 футеровки от износа так, чтобы средства 17 соединения на нижней поверхности элемента 10 футеровки от износа располагались по центру относительно каждого соединительного отверстия 21, прежде чем элемент футеровки от износа мог быть опущен на место и зафиксирован посредством вспомогательных средств 17' соединения с внешней поверхности барабана вторым оператором 6, работающим снаружи измельчающего барабана 1.
На фиг. 1 продемонстрировано подъемное устройство 14 с крановым исполнением, работающее внутри измельчающего барабана 1. Захват 12, выполненный на конце подъемного устройства 14, является известным способом оснащенным штифтами или крюками (на чертежах не продемонстрированы), которые могут вставляться в подъемные проушины 11 элемента 10 футеровки от износа. Когда упомянутые крюки были вставлены в подъемные проушины 12, элемент 10 футеровки от износа может переноситься в удерживающем положении посредством подъемного устройства 14 и может этим способом свободно подвергаться манипулированию и позиционированию внутри дробилки. Движение подъемного устройства 14 управляется и отслеживается посредством средств 14а управления и приводного механизма, обычно управляемых гидравлически, таких как гидравлические цилиндры, но может в альтернативном варианте быть представленным электрическими сервоприводами. Управление средствами управления и приводным механизмом подъемного устройства 14 осуществляется посредством блока 14b управления, такого как блок вентиля управления с гидроразъемами и посредством воздействия блока 20 управления с помощью управляющих и направляющих рычагов, которые первый оператор 5, работающий внутри измельчающего барабана, перемещающийся вместе с подъемным устройством в качестве машиниста, имеет перед собой на месте управления. Первый оператор 5, работающий внутри измельчающего барабана 1, таким образом перемещается вместе с подъемным устройством 14 и таким образом осуществляет управление его различными движениями посредством блока 20 управления. Блок 20 управления является оснащенным требуемыми кнопками и ручками, которые посредством своего воздействия и установки побуждают подъемное устройство 14 выполнять желаемые движения. С помощью подъемного устройства 14 элемент футеровки может перемещаться по существу свободно в пространстве или, по меньшей мере, с двумя или тремя степенями свободы поступательного движения в пространстве, то есть в направлениях x, y и z, и с помощью некоторого количества вращательных степеней свободы также может обычно осуществляться управление его углом наклона, например углом бокового наклона, углом продольного наклона и углом скольжения захватывающего устройства. [Пропущенный текст: "Это может быть описано как"] первый угол α, определяемый в плоскости xy, второй угол β, определяемый в плоскости yz, и третий угол γ, определяемый в плоскости xz.
В целях обеспечения возможности замены изношенных футеровок барабанов во вращающихся барабанных мельницах 1 более действенным и безопасным способом система 30 управления и позиционирования в соответствии с настоящим изобретением является выполненной с возможностью работы совместно с подъемным устройством 14. Система 30 управления и позиционирования облегчает, в частности, осуществление управления и позиционирования кранового устройства 14 в режиме реального времени посредством первого оператора 5, располагающегося внутри измельчающего барабана 1 таким способом, чтобы элемент 10 футеровки от износа располагался точно в правильном месте на опорной поверхности во внутренней поверхности кожуха 2 из листового металла. Выражение «на месте» используется ниже для обозначения нижеследующего: что средства 17 соединения элемента 10 футеровки от износа, причем средства соединения являются оснащенными внутренней резьбой, располагаются по существу по центру относительно соответствующего монтажного отверстия 21 в листовом металле 2 кожуха так, что для соединения с натяжением элемента футеровки от износа вспомогательные средства 17’ соединения в форме винтов 18 могут вставляться посредством прохождения через монтажные отверстия 21 и ввинчивания в средства 17 соединения в форме резьбовых отверстий 19 элемента 10 футеровки от износа. Термин «реальное время» используется для обозначения, что первый оператор 5, управляющий подъемным устройством, принимает, по существу, без какой-либо задержки во времени, то есть моментально, информацию о положении элемента 10 футеровки от износа относительно назначенного местоположения монтажа на опорной поверхности внутренней поверхности кожуха барабана.
Фиг. 2 в соответствии с настоящим изобретением более детально демонстрирует систему 30 управления и позиционирования, посредством которой посредством монтажных отверстий 21 кожуха барабана 2 определяется первая опорная система Rv, а вторая опорная система Rs формируется посредством средств 17 соединения, расположенных на нижней поверхности элемента 10 футеровки от износа в форме отверстий 19, обеспеченных внутренними резьбами. Система 30 управления и позиционирования дополнительно содержит средство наблюдения, которое на основе двух опорных систем Rv, Rs делает для оператора крана 5, осуществляющего маневрирование подъемным устройством 14, более легким направление в сторону определенного местоположения монтажа на внутренней поверхности кожуха из листового металла. Данное средство наблюдения системы управления и позиционирования содержит двумерный датчик в форме первой и второй камер 31, 31' для записи изображений. Каждая такая камера 31, 31' для записи изображений принадлежит к типу, в котором изображения экспонируются на цифровом датчике изображений и передаются в качестве электрических сигналов, представляющих поток статических изображений или последовательностей изображений взаимного расположения первой и второй опорных систем Rv, Rs. На каждой камере 31, 31' для записи изображений в форме источника света 32 со светодиодами LED, равномерно распределенными по кругу вокруг объектива 33 камеры 31, 31’ для записи изображений (фиг. 4), является выполненным источник освещения.
Фиг. 3 более подробно демонстрирует корпус 34 камеры, который может открываться, в который могут вставляться и фиксироваться каждая из упомянутых камер 31, 31' для записи изображений и ее ассоциированный источник света 32. Средства 35 соединения присутствуют на переднем конце корпуса 34 камеры в форме магнитного соединения, с помощью которого корпус камеры может быть смонтирован способом, предоставляющим возможность ее съема, на внешней поверхности листового металла 2 кожуха измельчающего барабана 1 так, чтобы две камеры 31, 31' для записи изображений были стационарно фиксированы относительно первой опорной системы Rv способом, продемонстрированным на фиг. 2. Между корпусом 34 камеры и средством 35 соединения, расположенным на переднем конце, проходит промежуточная трубчатая часть 36a и на короткое расстояние вперед от средства 35 соединения выдается направляющая 36b в форме кольца. Объектив 33 камеры 31, 31' для записи изображений назначен проходить на короткое расстояние в заднюю часть трубчатой части 36a, посредством чего упомянутая часть формирует принимающее отделение для объектива. Трубчатая направляющая 36b, выдающаяся вперед от средства 35 соединения, получила внешний диаметр, выбранный таким образом, чтобы она могла вставляться в качестве контактного измерительного наконечника в монтажное отверстие 21 в листовом металле 2 кожуха. Трубчатая направляющая 36 прикрепляется на корпусе 34 камеры посредством штыкового затвора или схожим способом, предоставляющим возможность ее съема, посредством чего корпус камеры может просто обеспечиваться трубчатыми направляющими 36 с различными внешними диаметрами в целях обеспечения возможности их подгона к кожухам 2 барабанов с монтажными отверстиями различных внутренних диаметров.
На переднем конце трубчатой направляющей 36b корпуса 34 камеры существует отверстие 37, которое, когда трубчатая направляющая была вставлена на определенное расстояние в монтажное отверстие 21 в кожухе 2, не только предоставляет возможность приема и проецирования изображений на цифровые датчики изображений камер 31, 31' для записи изображений, находящихся внутри корпуса камеры, но также предоставляет возможность свету в форме пучков от источника света 32 исходить из корпуса камеры в целях освещения цели, представленной посредством нижней поверхности элемента 10 футеровки от износа. В то время как две камеры 31, 31' для записи изображений являются фиксированными в положении относительно первой опорной системы Rv (через посредство монтажных отверстий 21) с полем обзора, представленным посредством средств 17 соединения, расположенных на нижней поверхности элементов 10 футеровки от износа, вторая опорная система Rs для системы получается посредством подходящей обработки изображений электрического сигнала, представляющего изображение упомянутой цели, такой как, например, двумерное изображение. Это двумерное изображение делает для оператора крана возможным интерпретирование в режиме реального времени взаимного расположения двух опорных систем Rv, Rs, то есть взаимного расположения монтажных отверстий 21 листового металла 2 кожуха и средств 17 соединения, расположенных на нижней поверхности элемента 10 футеровки от износа. Через использование растеризации изображений и различных типов геометрических форм объектов, возникающих между двумя опорными системами Rv, Rs, то есть через сравнения целевых значений с фактическими значениями для проецируемых поверхностей, для квалифицированного оператора крана является возможным сделать заключения о взаимных расположениях двух опорных плоскостей (их характеристиках) и как должно осуществляться маневрирование подъемным устройством в целях расположения средств 17 соединения элемента 10 футеровки от износа и, таким образом, также опорной системы Rs по центру относительно первой опорной системы Rv. В соответствии с настоящим изобретением взаимное расположение двух опорных систем Rv, Rs определяется в присутствии потока света, производимого посредством источника света 32. Следует понимать, что с целью сделать взаимное расположение двух опорных систем Rv, Rs видимым в камере для записи изображений, могут использоваться другие подходящие источники освещения, такие как свет лазера или инфракрасный свет.
Фиг. 4 более детально демонстрирует камеру 31, 31' для записи изображений, посредством чего становится ясным, что объектив 33 содержит визирные линии 38, формирующие исходную точку в центре монтажного отверстия 21. Благодаря источнику света 32 визирные линии 38 формируют освещенную опорную точку, цель которой будет более подробно описана ниже. Каждая камера 31, 31' для записи изображений и каждый источник света 32 выполняется в корпусе 34 камеры таким образом, чтобы при средствах 35 соединения, смонтированных над одним из монтажных отверстий 21 измельчающего барабана, камера 31, 31' для записи изображений имела свои линии видимости обращенными в центр измельчающего барабана или, если выразиться иными словами, она «смотрела» внутрь в направлении центра. Источник света 32 схожим способом проецирует пучок 40 через монтажное отверстие 21, проходящий через нижнюю поверхность 16 элемента 10 футеровки от износа, подвергающегося манипулированию посредством подъемного устройства 14 внутри измельчающего барабана 1.
Фиг. 5 более подробно разъясняет, что каждая камера 31, 31' для записи изображений является соединенной посредством блока 42 обработки изображений с монитором 44, принимающим и проецирующим сигналы изображений от двух камер 31, 31' для записи изображений. Связь между упомянутыми блоками может достигаться любым подходящим способом, например через сети и беспроводные линии связи, с одной или несколькими точками доступа в форме элементов, известных как базовые радиостанции, выполненные внутри области шахты с некоторым количеством работающих дробилок. Информация об изображении может передаваться по беспроводной связи посредством Интернета или сети WLAN на очень большие расстояния, даже между различными частями света, посредством чего для одного опытного оператора крана, используя внешнюю связь, может быть возможным осуществлять дистанционное управление с оперативной базы одним или некоторым количеством подъемных устройств 14 или манипуляторов во время замены футеровок от износа на далеко расположенных объектах горнодобывающего комплекса. В описываемом здесь варианте осуществления первый оператор 5, работающий внутри измельчающего барабана 1, перемещается вместе с подъемным устройством 14 и осуществляет управление его различными движениями посредством блока 20 управления. Является преимуществом, если монитор 44 может быть адаптирован с возможностью отображения для оператора 5 стереотаксических изображений от каждой одной из двух камер 31, 31' для записи изображений, используя в то же самое время то, что известно как «разделенный экран». Выражаясь иными словами, на DualScreen формируются сеансы с изображениями 44a, 44b от первой и второй камер 31, 31' для записи изображений соответственно. Поскольку является известным, что требуются две опорные точки или опорные данные в целях направления объекта в конкретное положение на плоскости, то есть на плоскости опорной поверхности для элемента 10 футеровки от износа, которую формирует внутренняя поверхность кожуха 2 из листового металла измельчающего барабана 1, следует осознавать, что является преимуществом, если на мониторе 44 могут быть стереотаксически, то есть способом, проиллюстрированным на фиг. 6a и фиг. 6b, продемонстрированы оба изображения камеры 44a, 44b.
Опорные точки обозначаются на фиг. 6a и фиг. 6b каждая с помощью визирных линий 38, в то время как каждая цель обозначается с помощью средств 17 соединения. Как следствие стереотаксических изображений, передаваемых монитором в какой-либо любой момент через изображения 44a, 44b двух камер (фиг. 6a, фиг. 6b), получаемые на мониторе 44, интегрированном в блок 20 управления, первый оператор 5 способен быстро локализовывать точное местоположение на кожухе 2 из листового металла для элемента 10 футеровки от износа и положение, в котором две опорные системы Rv и Rs лежат по центру относительно друг друга с их плоскостями X/Y, проходящими параллельно. Выражаясь иными словами, оператор может локализовывать положение, при котором два из средств 17 соединения элемента 10 футеровки от износа располагаются по центру относительно соответствующих монтажных отверстий 21 в кожухе 2 и при котором средства 17 соединения элемента 10 футеровки от износа являются перпендикулярными к плоскости X/Y. Таким образом, визирные линии 44 формируют в мониторе 44 опорную систему, требуемую первым оператором 5, управляющим краном. Через управление рычагами и ручками блока 20 управления элемент 10 футеровки от износа, поддерживающийся посредством подъемного устройства 14, позиционируется на месте, так что два из его средств 17 соединения располагаются по центру относительно соответствующего монтажного отверстия 21 в листовом металле 2 кожуха, после чего элемент футеровки от износа опускается на место. Второй оператор 6 закрепляет элемент 10 футеровки от износа на внутренней поверхности измельчающего барабана посредством винтов 18, вставляемых через монтажные отверстия 21 и ввинчивающихся в средство 17 соединения элемента футеровки от износа с внешней поверхности (поверхности натяжения) измельчающего барабана 1.
Фиг. 7 схематически демонстрирует различные угловые положения, которые могут возникать между двумя монтажными отверстиями 21, включенными в фиксированную первую опорную систему Rv, определяемую посредством стенки 2 кожуха (плоскость X/Y) измельчающего барабана, и двумя средствами 17 соединения (схематически отображенными здесь как цилиндры), являющимися компонентами подвижной второй опорной системы Rs, определяемой посредством элемента 10 футеровки от износа, подвергающегося манипулированию посредством подъемного устройства 14. Два средства 17 соединения элемента 10 футеровки от износа на фиг. 7a размещаются продольными осями перпендикулярно к плоскости X/Y, определяемой посредством монтажных отверстий 21 пластины 2 кожуха. Два средства 17 соединения элемента 10 футеровки от износа на фиг. 7b размещаются продольными осями под углом 25° к плоскости X/Y, определяемой посредством монтажных отверстий 21 пластины 2 кожуха. Два средства 17 соединения элемента 10 футеровки от износа на фиг. 7c размещаются продольными осями под углом -25° к плоскости X/Y.
Фиг. 8 схематически демонстрирует различные угловые положения, которые могут возникать между двумя опорными системами Rv, Rs, также проиллюстрированными на фиг. 7а по фиг. 7c, но в этом случае продемонстрированными на основе поля обзора двумерного датчика 31, 31'. Таким образом, на фиг. 8a по фиг. 8c проиллюстрированы способы, которыми две камеры 31, 31' для записи изображений видят средства 17 соединения элемента 10 футеровки от износа через монтажные отверстия 21 и геометрические изображения, представляемые в форме двумерного изображения 44a, 44b оператору крана на блоке 44 отображения или монитора на месте эксплуатации подъемного устройства 14 (см. также фиг. 5). Изображения от каждой из камер 31, 31' обозначаются a1-c1 и a2-c2 соответственно. Схожим способом со способом, описанным выше, фиг. 8a демонстрирует положение, при котором два средства 17 соединения элемента 10 футеровки от износа располагаются продольными осями перпендикулярно к плоскости X/Y, определяемой посредством монтажных отверстий 21 пластины 2 кожуха. Два средства 17 соединения элемента 10 футеровки от износа на фиг. 8b размещаются продольными осями под углом 25° к плоскости X/Y, определяемой посредством монтажных отверстий 21 пластины 2 кожуха. Два средства 17 соединения элемента 10 футеровки от износа на фиг. 8c размещаются продольными осями под углом -25° к плоскости X/Y.
Как было описано выше, элемент 10 футеровки от износа может перемещаться с помощью подъемного устройства 14 по существу свободно в пространстве или, по меньшей мере, при двух или трех степенях свободы поступательного движения в пространстве, то есть в направлениях x, y и z, и с помощью некоторого количества вращательных степеней свободы также обычно может осуществляться управление его углом наклона, например углом бокового наклона, углом продольного наклона и углом скольжения. Под управлением последовательности изображений от блока 44 отображения, то есть монитора, который оператор крана 5 имеет на месте эксплуатации, оператор может направлять и маневрировать элементом футеровки от износа до его местоположения, после чего тот опускается и фиксируется на месте с внешней поверхности барабана, то есть со стороны монтажа.
Фиг. 9 демонстрирует систему, предоставляющую возможность дистанционного управления системой управления и позиционирования, которая была описана выше и которая делает возможным для опытного и квалифицированного оператора крана 5 осуществление работы с использованием дистанционного управления в системе, в которой передача данных осуществляется через, например, Интернет или сеть WLAN. Этим способом делается возможным выполнение обновления и футеровки дробилок без необходимости наличия на месте квалифицированного персонала, посредством чего опытный оператор крана может быть в состоянии с помощью настоящей системы управления и позиционирования осуществлять дистанционное управление извне одним или несколькими подъемными устройствами или манипуляторами внутри различных дробилок в различных местах мира. Система, предоставляющая возможность этого, содержит подъемное устройство 14, оснащенное блоком 14b управления, то есть блоком вентиля управления, предоставляющим возможность дистанционного управления посредством блока 20b управления, содержащего рычаги направления и управления. Гидравлические системы, предоставляющие возможность дистанционного управления, обычно включают в себя передатчики и приемники, где сигналы управления в форме инфракрасного излучения передаются в качестве электрических команд управления на управление в блоке 14b управления машины и хорошо известны в течение длительного времени, и вследствие этого не будут описываться более подробно. Настоящая система содержит, помимо всего прочего, блок 42 обработки изображений, назначенный принимать изображения от первой и второй камер 31, 31', модуль 108 беспроводной связи, беспроводное устройство 60 совместного использования протоколов IP (где «IP» является сокращением термина «Интернет-протокол»), а также удаленное рабочее место для оператора, содержащее компьютерный терминал 120, соединенный с Интернетом 100 и для которого был выделен блок 20b управления, содержащий рычаг управления (ручку управления «джойстик») для осуществления маневрирования крановым устройством 4. Сигналы изображений, выполненных двумя камерами 31, 31', посылаются на блок 42 обработки изображений и после обработки в этом блоке посылаются в качестве сигнала изображения через модуль 108 беспроводной связи и беспроводной блок 60 совместного использования протоколов IP. Модуль беспроводной связи принимает также сигналы управления от компьютерного терминала 120 и системы 20b управления для блока 14b управления и, таким образом, команды для осуществления маневрирования и направления подъемного устройства 14. Двусторонняя передача данных, таким образом, осуществляется через Интернет 100. Модуль 108 беспроводной связи может представлять собой беспроводной адаптер USB или карту беспроводной LAN, совместимую для использования с беспроводным устройством 60 совместного использования протоколов IP. Сигналы управления для блока 14s управления задаются посредством команд 120 с клавиатуры на компьютерном терминале в комбинации с командами от ручки управления «Джойстик» через рычаг 20b управления, посредством чего эти команды принимаются посредством модуля 60 совместного использования протоколов IP с целью их передачи далее в управление 14a системой через модуль 108 связи. Беспроводное устройство 60 совместного использования протоколов IP является таким образом соединенным с линией 120 Интернета с целью не только скачивания данных изображения от камер 31, 31', но также с целью передачи сигналов управления на средства 14a управления и приводного механизма подъемного устройства 14. Оператор крана 5, сидящий перед компьютерным терминалом 120, 20, будучи в то же самое время географически удаленным от места нахождения, например, дробилки 1, может таким образом посредством рычага 20b управления осуществлять управление всеми движениями подъемного устройства 14 с помощью геометрических образов между теми двумя, которые являются отображенными на мониторе 44, от каждой из двух камер 31, 31' для записи изображений и двух опорных систем Rv и Rs.
Настоящее изобретение не ограничивается до того, что было описано выше и продемонстрировано на чертежах: оно может изменяться и модифицироваться несколькими различными способами в пределах объема новаторской идеи, определенной посредством прилагаемой патентной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ОПРЕДЕЛЕНИЯ ИЗНОСА ИЗМЕЛЬЧАЮЩИХ ЭЛЕМЕНТОВ ИЗМЕЛЬЧИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2645056C2 |
| СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ И СОСТАВЛЕНИЯ КАРТЫ ПОВЕРХНОСТИ ОТНОСИТЕЛЬНО РЕПЕРА | 2005 |
|
RU2416783C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СТЕПЕНИ ИЗНОСА ИЗМЕЛЬЧАЮЩИХ ЭЛЕМЕНТОВ | 2015 |
|
RU2681173C2 |
| Манипулятор и футеровочный блок для выполнения торкретирования промышленного оборудования | 2023 |
|
RU2818700C1 |
| СПОСОБ УПРАВЛЕНИЯ СООРУЖЕНИЕМ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОГО ОБЪЕКТА | 1991 |
|
RU2034969C1 |
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ ДАТЧИКА ИЗНОСА НА ТОРМОЗНОМ РЫЧАГЕ ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2727636C2 |
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545062C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛИРОВАНИЯ РАБОЧИХ ПАРАМЕТРОВ И/ИЛИ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ИЗНОСА ТРОСА ПРИ ИСПОЛЬЗОВАНИИ В ПОДЪЕМНЫХ МЕХАНИЗМАХ | 2017 |
|
RU2729841C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗЛИЧНЫХ ПЕРЕМЕННЫХ В НОСКЕ МЕТАЛЛУРГИЧЕСКОГО КОНВЕРТЕРА | 2017 |
|
RU2766939C2 |
Изобретение относится к системе управления и позиционирования монтажного положения сменного элемента футеровки и к применению камеры системы для определения взаимного расположения сменного элемента футеровки и определенного монтажного положения элемента футеровки. Изобретение может быть использовано при замене элементов футеровки. Система содержит первую опорную систему, сформированную посредством монтажных отверстий стенки, вторую опорную систему, сформированную посредством средств соединения, расположенных на нижней поверхности элемента футеровки, двумерный датчик, выполненный с возможностью стационарного размещения на стороне стенки монтажной поверхности, противоположной подверженной износу стенке, таким способом, чтобы в поле обзора датчика входила нижняя поверхность элемента футеровки, просматриваемая через монтажные отверстия. При этом датчик выполнен с возможностью передачи электрического сигнала, представляющего изображение взаимного расположения двух опорных систем, для определения оператором крана монтажного положения элемента футеровки. Двумерный датчик может содержать две камеры для записи изображений. Применяемая в системе камера выполнена с возможностью записи изображения нижней поверхности элемента футеровки через монтажное отверстие в стенке. Система управления и позиционирования положения сменного элемента футеровки значительно повышает точность монтажных работ и одновременно облегчает их проведение. 2 н. и 9 з.п. ф-лы, 9 ил.
1. Система управления и позиционирования для обозначения монтажного положения сменного элемента (10) футеровки от износа на поверхности на стенке (2), подверженной износу, которая может быть образована, например, внутренней поверхностью вращающегося барабана (1) на дробилке руды, и где элемент футеровки от износа поддерживается на свободном конце способной к маневрированию стрелы, являющейся компонентом подъемного устройства (14), управляемого во время осуществления манипулирования элементом футеровки от износа во время осуществления оператором (5) крана операции монтажа, посредством чего обеспечивается стенка с набором монтажных отверстий (21), а элемент футеровки от износа оснащается на своей нижней поверхности средствами (17) соединения, посредством которых элемент футеровки от износа закрепляется на поверхности с помощью вспомогательных средств (17') соединения, вставляемых через монтажные отверстия, отличающаяся тем, что содержит:
первую опорную систему (Rv), образованную монтажными отверстиями (21) стенки (2),
вторую опорную систему (Rs), образованную средствами (17) соединения, расположенными на нижней поверхности элемента (10) футеровки от износа,
двумерный датчик (31, 31'), расположенный стационарно на внешней поверхности стенки (2), то есть на стороне стенки монтажной поверхности, противоположной подверженной износу стороне, таким образом, чтобы поле обзора датчика содержало нижнюю поверхность элемента (10) футеровки от износа, просматриваемую через монтажные отверстия (21), причем датчик выполнен с возможностью передачи электрического сигнала, представляющего изображение взаимного расположения двух опорных систем (Rv, Rs), и под управлением этого изображения оператором (5) крана может определяться монтажное положение элемента (10) футеровки от износа на стенке.
2. Система управления и позиционирования по п. 1, в которой двумерный датчик (31, 31') содержит две камеры для записи изображений, безопасно прикрепленные к первой опорной системе (Rv) таким способом, чтобы их поля обзора содержали средства соединения (17), расположенные на нижней поверхности элемента (10) футеровки от износа, видимые через монтажные отверстия (21).
3. Система управления и позиционирования по п. 2, содержащая блок (42) обработки изображений, преобразующий электрический сигнал от камер (31, 31') для записи изображений в графическое двумерное изображение (44a, 44b), и блок (44) отображения, с помощью которого оператору (5) крана в режиме реального времени может быть представлено изображение так, чтобы он или она могли направлять и осуществлять маневрирование подъемным устройством и таким способом приводить элемент (10) футеровки от износа в его монтажное положение на стенке (2).
4. Система управления и позиционирования по п. 1, содержащая источник освещения (32), выполненный с возможностью излучения света от внешней поверхности стенки (2) через монтажные отверстия (21) или отверстия стенки в направлении к нижней поверхности элемента (10) футеровки от износа.
5. Система управления и позиционирования по п. 1, в которой двумерный датчик (31, 31') содержит направляющую (36b) в форме кольца для вставления в качестве контактного измерительного наконечника в монтажные отверстия (21) стенки (2) для геометрического определения геометрического положения первой опорной системы (Rv).
6. Система управления и позиционирования по п. 5, содержащая корпус (34), в котором размещаются камера (31, 31') для записи изображений и источник освещения (32), и чей корпус оснащен на переднем конце направляющей (36b) в форме кольца и средством (35) соединения, предоставляющим корпусу возможность быть смонтированным на внешней поверхности стенки (2) в сочетании с монтажным отверстием (21), способом, предоставляющим возможность его съема.
7. Система управления и позиционирования по п. 6, в которой средство (35) соединения содержит магнитное соединение.
8. Система управления и позиционирования по п. 4, в которой каждая камера (31, 31') для записи изображений содержит объектив (33), на котором выполнен источник освещения (32) в качестве набора светодиодов LED, распределенных по кругу объектива (33).
9. Система управления и позиционирования по п. 1, содержащая подъемное устройство (14) типа, демонстрирующего блок (14b) управления, обеспеченный передатчиком и приемником в целях предоставления возможности дистанционного управления для средства (14a) управления и приводного механизма подъемного устройства, и где сигналы управления посылаются в качестве электрических команд управления на управление в блоке управления устройства, блок внешней связи (108, 106, 120, 44, 20b), предлагающий соединение двусторонней связи через Интернет (100) с блоком управления и блоком обработки изображений и с помощью которого оператор (5) крана, расположенного на расстоянии, может в режиме реального времени направлять и осуществлять управление взаимными расположениями опорных систем (Rv, Rs).
10. Система управления и позиционирования по п. 9, в которой блок внешней связи (108, 106, 120, 44, 20b) содержит компьютерный терминал с ассоциированным рычагом управления.
11. Применение камеры (31, 31') для записи изображений для определения взаимного расположения сменного элемента (10) футеровки от износа и определенного монтажного положения для упомянутого элемента на поверхности, сформированного на внутренней поверхности подверженной износу стенки (2) с монтажными отверстиями (21) для элемента футеровки от износа, причем камера выполнена так, чтобы она "видела" нижнюю поверхность элемента (10) футеровки от износа через монтажное отверстие в стенке.
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
| US 5148591 A, 22.09.1992 | |||
| Устройство для футеровки трубных мельниц | 1988 |
|
SU1678449A1 |
| US 3752338 A, 14.08.1973 | |||
| Устройство для монтажа в барабанной мельнице футеровочных плит с болтовым креплением | 1982 |
|
SU1085625A1 |

