(1) Область техники
[1] Варианты реализации объекта изобретения, описанного в данной заявке, в основном относится к устройствам, способам и системам, а более конкретно, к устройствам, процессам, механизмам и методам для определения параметров внутренней огнеупорной футеровки металлургических сосудов.
(2) Описание предшествующего уровня техники
[2] Приемные резервуары, такие как ковш, содержат огнеупорную футеровку, выполненную с возможностью защиты от высоких температур, когда приемный резервуар содержит расплавленный металл. Однако, огнеупорная футеровка подвергается износу или действию отложений, выпадающих из расплавленного металла. Контроль огнеупорной футеровки играет важную роль для обеспечения непрерывной и безопасной эксплуатации приемного резервуара. Выполнение визуального осмотра приемного резервуара, когда он пустой, было наиболее распространенным способом контроля протекания износа и повреждения огнеупорной футеровки. По финансовым соображениям и по соображениям времени способ измерения не должен требовать охлаждения сосуда, наоборот должно быть возможным проводить измерения в сосуде, температура которого равна или приблизительно равна температуре эксплуатации. По этой причине нельзя использовать способы механического контакта с поверхностью.
[3] Измерение профиля внутренней поверхности сосудов, используемое при производстве расплавленного металла с использованием высокоскоростных сканирующих лазерных дальномеров, широко распространено в металлургической промышленности. Чугунные и стальные ковши, основные кислородные конвертеры (BOF), сосуды для аргонно-кислородного рафинирования (AOD), электродуговые печи (EAF), сосуды для плавления алюминия и меди, печи литейного цеха, чугуновозы и печи для донной продувки (Q-BOP) - все из них подвергают анализу с помощью лазерных сканеров для определения внутреннего профиля огнеупорного материала и вычисления остаточной толщины футеровки.
[4] В данной области техники для осуществления измерений в горячих огнеупорных сосудах используют лазерный сканер, имеющий излучатель лазерного луча, зеркало для отклонения лазерного луча и приемник лазерного луча для приема лазерного луча, отклоненного поверхностью огнеупорной футеровки. Время распространения между излучением и приемом лазерного луча лазерным сканером можно использовать для вычисления расстояния между огнеупорной футеровкой и лазерным сканером в направлении излучаемого лазерного луча. Изменение направления лазерного луча производит совокупность времен распространения, из которых можно получить совокупность расстояний и совокупность точек. Для перемещения массива данных из системы координат сканера в систему координат сосуда применяют преобразование координат, при этом результаты измерений можно использовать для определения толщины футеровки.
[5] Вращение зеркала вокруг первой оси вращения, а самого лазерного сканера вокруг второй оси вращения обеспечивает сканирование огнеупорной футеровки в двух взаимно перпендикулярных направлениях таким образом, чтобы получить множество точек, отображающих сканированную поверхность. Благодаря высокой точности лазерного сканера путем сравнения последовательных изображений поверхности можно определить, какая часть огнеупорной футеровки подверглась коррозии или эрозии, или росту из-за отложений. Обычные системы обеспечивают точность измерения толщины футеровки +/- 5-6 мм.
[6] Однако, из-за внутренней формы приемного резервуара, внутренних геометрических ограничений приемного резервуара, отсутствие возможности расположить лазерный сканер слишком близко к приемному резервуару, температура которого равна или приблизительно равна температуре эксплуатации, лазерный сканер может оказаться не в состоянии получить полный обзор интересующей поверхности.
[7] Для решения этой проблемы лазерный сканер можно последовательно перемещать в разных направлениях или можно изменять положение приемного резервуара относительно сканера таким образом, чтобы сканер мог получать изображение в каждом местоположении. Эти изображения объединяют в глобальное «изображение». Для объединения последовательных изображений в глобальное изображение требуются очень точные сведения о положении лазерного сканера относительно приемного резервуара в каждой точке измерений. Это повышает сложность процесса, снижает точность получаемого глобального изображения, подвергает оборудование дополнительному нагреву и увеличивает время, требуемое для завершения измерений.
[8] В WO2008109510 содержится описание устройства измерения износа огнеупорной футеровки приемного резервуара, предназначенного для расплавленного металла. Однако, устройству для выполнения функции, для которой оно предназначено, требуются два узла сканера, тем самым усложняя объединение массивов данных, генерируемых каждым узлом сканера. Кроме того, совместное поле обзора двух узлов сканера ограничено кожухом, в который помещены узлы сканера. Применительно к сферической системе координат, значения фи (углы вокруг оси вращения каждого лазерного сканера) ограничены приблизительно 180 градусами. Кроме того, значения тета (углы в пределах плоскости, ограниченной пределами поля обзора зеркала внутри узла сканера) не включают ось z.
[9] В US8072613 содержится описание системы и способа измерения износа футеровки сосуда, такого как ковш сигарообразной формы. Внутреннюю поверхность футеровки контейнера сканируют головкой сканера из первого положения в контейнере, которое расположено под углом относительно вертикальной оси контейнера. Головка сканера расположена во втором положении в контейнере под углом относительно вертикальной оси контейнера, причем из второго положения головка сканера сканирует участки внутренней поверхности футеровки контейнера, которые не были сканированы при первом положении сканирования. Износ футеровки можно измерить путем сравнения результатов измерения при сканировании футеровки из первого положения сканирования и второго положения сканирования после того как контейнер был загружен и разгружен с начальным эталонным результатом измерения футеровки. Таким образом, для системы и способа требуются два сканирования для полного измерения, а также требуется перемещать узел сканера в новое положение для выполнения второго сканирования. Применительно к полярной системе координат, допустимые значения тета (углы в пределах плоскости, ограниченной пределами поля обзора зеркала внутри узла сканера) проходят на одинаковую величину с любой стороны плоскости, перпендикулярной оси z. Проекции допустимых значений тета на внутренней поверхности сферы, в центре которой расположено зеркало, образуют на сфере экваториальную зону. Допустимые значения тета не включают ось z.
[10] Таким образом, на основании по меньшей мере вышеуказанных обычных методов желательно получить устройства, системы и способы, которые снизят количество сканирований и, следовательно, время измерения, необходимое для получения результатов измерения толщины огнеупорной футеровки в металлических сосудах, выполненных с возможностью транспортировки материалов с температурой выше температуры плавления металла, приведут к уменьшению воздействия на сканер внутренних условий измеряемого сосуда, и будут изменять конфигурацию поля обзора для повышения эффективности и снижения сложности процесса сканирования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[11] Одна или более вышеизложенных потребностей или других, известных в данной области техники, относятся к устройствам, способам и процессам для определения параметров огнеупорной футеровки в сосуде или контейнере. Раскрытое устройство содержит узел сканера, выполненный с возможностью установки на рычаге манипулятора сканера для размещения в непосредственной близости от отверстия в сосуде или вставки в отверстие в сосуде в указанную вогнутую внутреннюю поверхность сосуда, и для измерения расстояния от излучателя/датчика внутри узла сканера до множества точек поверхности огнеупорной футеровки для определения параметров внутренней поверхности сосуда за одно сканирование. Раскрытое устройство также содержит манипулятор сканера, имеющий рычаг манипулятора, прикрепленный к узлу сканера, причем рычаг манипулятора поддерживает узел сканера в положении измерения и позволяет излучателю/датчику сканера внутри узла сканера принимать положения, из которых излучатель/датчик сканера может измерять расстояния до множества точек на поверхности огнеупорной футеровки для определения параметров внутренней поверхности сосуда за одно сканирование. Раскрытые устройства также содержат роботизированное устройство, прикрепленное к манипулятору сканера, причем роботизированное устройство имеет систему управления, причем система управления содержит аппаратные средства и программные средства для управления положением узла сканера, ориентацией излучателя/датчика и сбором, хранением, обработкой и представлением результатов измерения, генерируемых излучателем/датчиком; причем система управления соединена с возможностью связи с узлом сканера; причем система управления определяет параметры огнеупорной футеровки путем сравнения множества расстояний, измеренных системой лазерного сканирования, с эталонной поверхностью огнеупорной футеровки.
[12] Способы и процессы для определения параметров огнеупорной футеровки в сосуде также находятся в пределах объема объекта изобретения, раскрытого в данной заявке. Такие способы включают этапы: установка роботизированного устройства в положение измерения; управление роботом посредством использования системы управления, содержащей аппаратные средства и программные средства, причем указанная система управления соединена с возможностью связи с узлом сканера; прохождение узла сканера, установленного на рычаге манипулятора, прикрепленного к роботизированному устройству, в непосредственной близости от сосуда или во внутреннюю часть сосуда; установка узла сканера; ориентирование излучателя/датчика сканера во множестве последовательных положений; измерение расстояния в каждом положении от излучателя/датчика сканера до внутренней поверхности сосуда и получение параметров огнеупорной футеровки путем сравнения множества расстояний, измеренных системой лазерного сканирования, с эталонной поверхностью огнеупорной футеровки.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
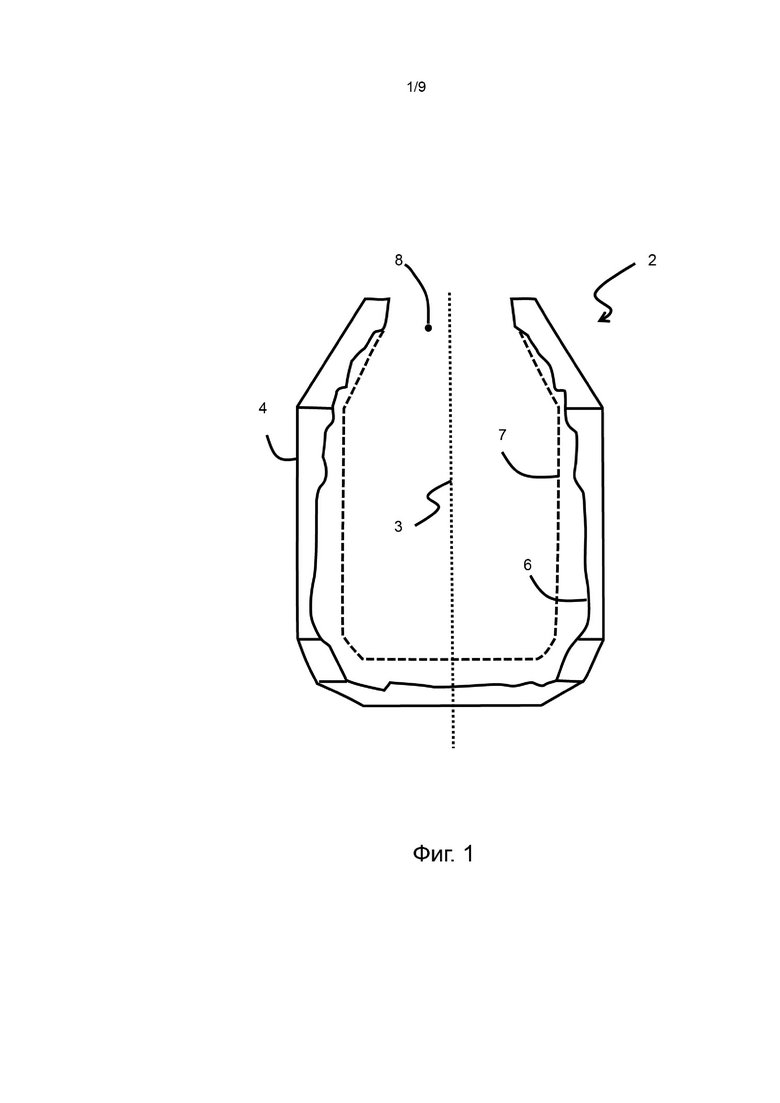
[13] На Фиг. 1 представлен вид в поперечном сечении сосуда, выполненного с возможностью удержания материалов при повышенных температурах;
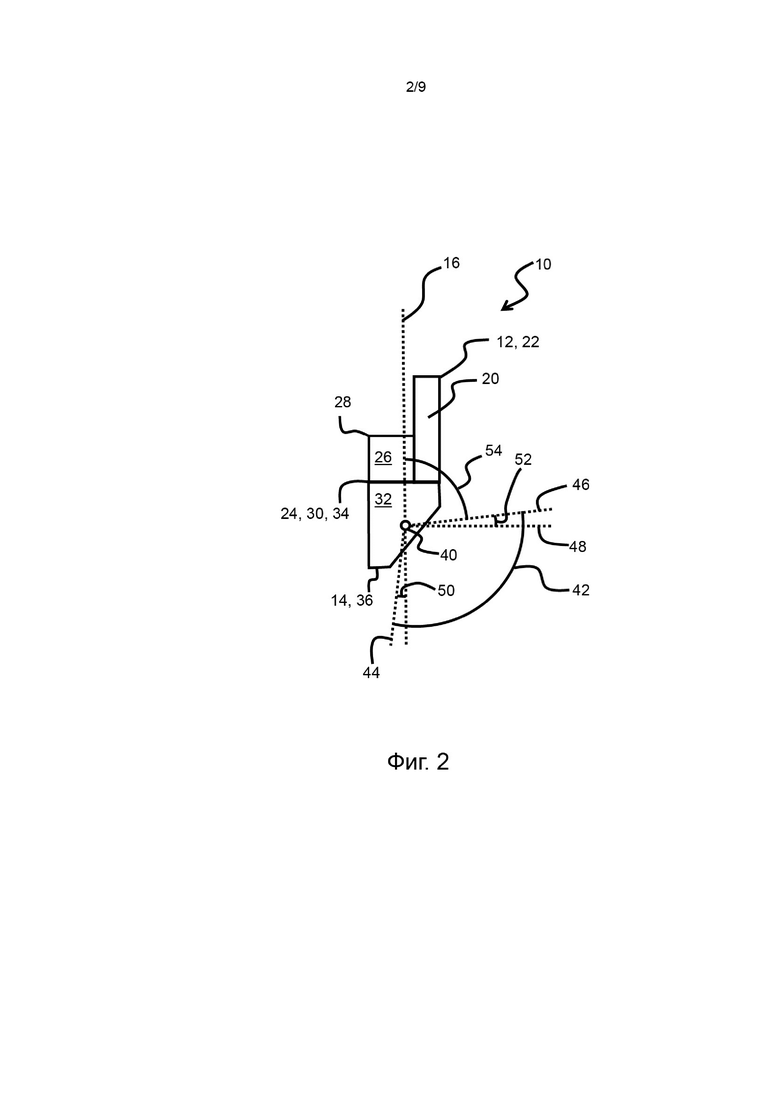
[14] на Фиг. 2 представлен схематический вид манипулятора сканера по данному изобретению;
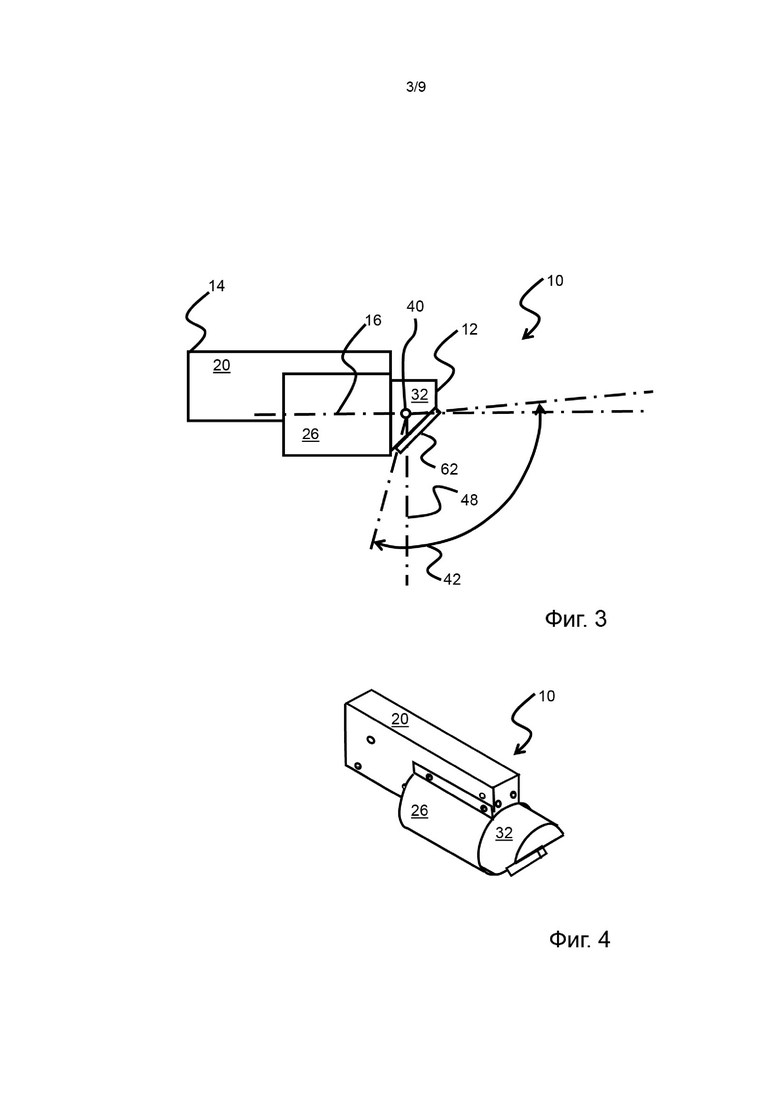
[15] на Фиг. 3 представлен вид сбоку узла сканера в соответствии с данным изобретением;
[16] на Фиг. 4 представлен вид в перспективе узла сканера в соответствии с данным изобретением;
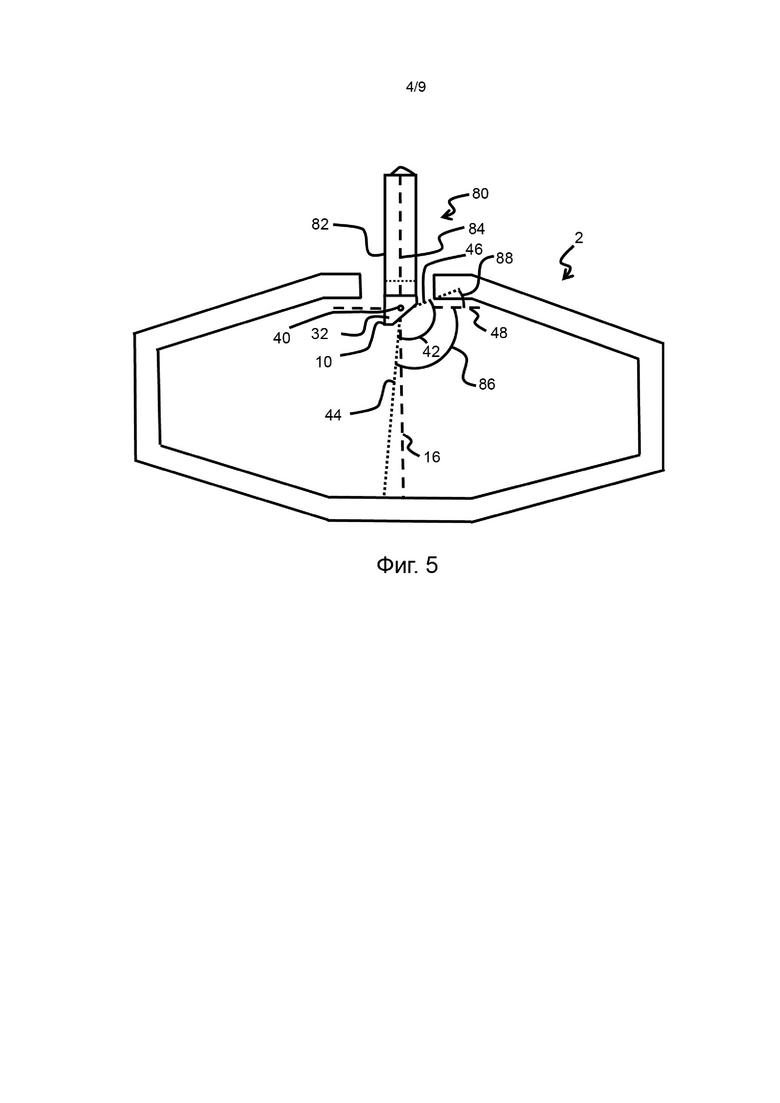
[17] на Фиг. 5 представлен вид в поперечном сечении ковша сигарообразной формы, содержащего манипулятор сканера в соответствии с данным изобретением;
[18] на Фиг. 6 представлено схематическое изображение узла сканера в соответствии с данным изобретением;
[19] на Фиг. 7 представлено схематическое изображение сферической системы координат;
[20] на Фиг. 8 представлено схематическое изображение геометрии расположения узла сканера;
[21] на Фиг. 9 представлено схематическое изображение механической части сканирующей системы в соответствии с данным изобретением;
[22] на Фиг. 10 представлено схематическое изображение механической части сканирующей системы в соответствии с данным изобретением;
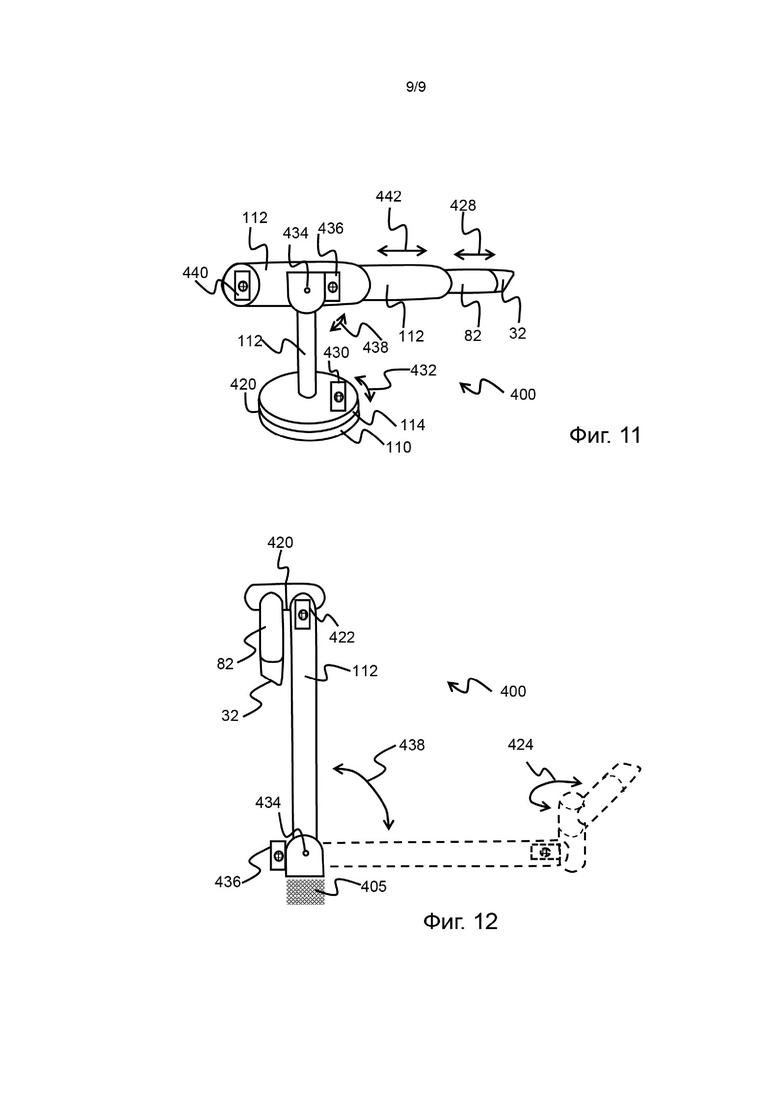
[23] на Фиг. 11 представлен вид в перспективе механической части сканирующей системы в соответствии с данным изобретением; и
[24] на Фиг. 12 представлено схематическое изображение механической части сканирующей системы в соответствии с данным изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[25] В последующем описании примеров вариантов реализации сделаны ссылки на прилагаемые графические материалы. Одинаковые ссылочные позиции на различных графических материалах обозначают одинаковые или подобные элементы. Последующее подробное описание не является ограничивающим для объема данного изобретения. Вместо этого, объем данного изобретения определяется прилагаемой формулой изобретения. Последующие варианты реализации рассматриваются, с целью упрощения, применительно к терминологии и структуре, устройств, систем или способов для автономного сканирования огнеупорной футеровки в металлургических резервуарах. Однако, рассмотренные ниже варианты реализации не ограничиваются этими установками, но могут применяться к другим устройствам, системам или способам, включая, но не ограничиваясь этим, определение параметров огнеупорных материалов в сосудах, выполненных с возможностью транспортировки веществ при температурах выше температуры плавления материала, из которого выполнен сосуд. В контексте всего данного документа термин «определять параметры», например, в выражении «определять параметры огнеупорной футеровки» означает анализировать и/или измерять внутреннюю поверхность огнеупорной футеровки с использованием автономного лазерного сканера для определения профиля внутренней поверхности огнеупорной футеровки и вычисления оставшейся толщины футеровки, чтобы, например, оценить максимально допустимый срок службы при поддержании низкой вероятности прорыва футеровки или определить, когда требуется ремонт. Определение параметров футеровки можно также использовать для определения положения вспомогательных устройств, используемых в металлургической промышленности при обработке, как например, точно заданного значения высоты над ванной жидкой стали для высоты кислородной фурмы.
[26] Ссылка по всему описанию на «одну конфигурацию» или «конфигурацию» означает, что конкретный элемент, структура или характеристика, описанные в связи с конфигурацией включены по меньшей мере в одну конфигурацию раскрытого объекта изобретения. Таким образом, появление фраз «в одной конфигурации» или «в конфигурации» в различных местах по всему описанию не обязательно относится к одной и той же конфигурации. Кроме того, конкретные элементы, структуры или характеристики можно объединять любым приемлемым способом в одной или более конфигурациях.
[27] Ссылка по всему описанию на «связанный с возможностью передачи данных» означает, что два элемента соединены таким образом, что данные в электронном или лучевом виде могут проходить от по меньшей мере одного из элементов к другому из элементов. Выражение «связанный с возможностью передачи команд» означает, что команда в электронном или лучевом виде может проходить от одного из элементов к другому из элементов. Выражение «связанный с возможностью управления» означает, что один из элементов выполнен с возможностью управления движением или функцией другого из элементов посредством команд, передаваемых в электронном или лучевом виде. Выражение «подвижно соединенный» означает, что два элемента соединены таким образом, что один элемент может перемещаться относительно другого элемента, например, вдоль общей оси, вокруг оси или шарнирно, при этом оставаясь в контакте с другим элементом. Выражение «шарнирное перемещение» и слово «шарнирно» относится к перемещению, при котором движение одной из пар элементов, связанных друг с другом, ограничено вокруг оси взаимодействия относительно другого элемента. Выражение «неподвижно соединенный» означает, что два элемента соединены таким образом, что они остаются в контакте и отсутствует возможность вращения для шарнирного перемещения или поступательного перемещения относительно друг друга. Выражение «выходит за пределы полусферы» относится к форме, представленной частью сферы или частью поверхности сферы, описанной 360 градусами долготы и более 90 градусами широты относительно полюса, и включая полюс. Угол «содержит» линию, если линия проходит через вершину угла, линии в плоскости угла и лежит между сторонами угла.
[28] На Фиг. 1 показан сосуд 2, выполненный с возможностью удержания материалов при повышенных температурах. В контексте всего документа термин «контейнер» или «сосуд» используются взаимозаменяемо и в широком смысле, включая ссылку на все виды металлических или неметаллических сосудов различных размеров и форм, предназначенных для удержания материалов или газов (в случае генератора для газификации) при повышенных температурах, которые могут быть ниже, равны или выше температуры плавления материала сосуда. Примерами таких контейнеров являются используемые в таких применениях как, но не ограничиваясь этим, процессы газификации в химическом производстве и производстве электроэнергии, электродуговые печи (EAF), основные кислородные конвертеры (BOF), ковши, доменные печи, дегазаторы и печи для аргонно-кислородного рафинирования (AOD) при производстве стали. Кроме того, в контексте всего документа, термин «материал при повышенной температуре» используется в широком смысле, чтобы иметь в виду материалы, предназначенные для размещения внутри этих сосудов, имеющих достаточно высокие температуры, чтобы вызвать повреждение после того, как они подверглись этим температурам, когда целостность огнеупорных материалов, покрывающих по меньшей мере часть поверхности сосуда, как-либо повреждается таким образом, что сосуд подвергается воздействию материалов при повышенных температурах. Как показано, сосуд 2 имеет продольную ось 3 сосуда, оболочку 4, внутренний слой огнеупорного материала 6 внутри оболочки 4 и отверстие 8. Продольная ось 3 сосуда проходит через отверстие 8. Штриховая линия 7 на Фиг. 1 иллюстрирует первоначальный слой огнеупорного материала 6 до того, как сосуд был помещен для использования.
[29] На Фиг. 2 показан узел 10 сканера для измерения износа в огнеупорной футеровке. Узел сканера содержит проксимальный конец 12 узла сканера, дистальный конец 14 узла сканера и продольную ось 16 узла сканера, проходящую от проксимального конца 12 к дистальному концу 14. Установочный рычаг 20, имеющий проксимальный конец 22 установочного рычага и дистальный конец 24 установочного рычага, расположен на дистальном конце 14 узла 10 сканера. Теплозащитный экран 26, имеющий проксимальный конец 28 теплозащитного экрана и дистальный конец 30 расположены вокруг по меньшей мере части окружности дистального конца 24 установочного рычага. Головка 32, имеющая проксимальный конец 34 головки и дистальный конец 36 головки, расположена на дистальном конце 14 узла 10 сканера. Дистальный конец установочного рычага 20 присоединен с возможностью вращения к проксимальному концу головки 34. Головка 34, таким образом, может вращаться вокруг продольной оси 16 узла сканера. Установочный рычаг 20 и головка 32 могут также быть описаны как связанные, причем проксимальный конец 34 головки 32 установлен с возможностью вращения на дистальном конце 24 установочного рычага 20, на котором головка 32 может вращаться относительно установочного рычага 20 вокруг продольной оси. Связь между установочным рычагом 20 и головкой 32 может находиться в плоскости, перпендикулярной продольной оси. Излучатель/датчик 40 установлен в неподвижном положении на головке 34. Оптический центр излучателя/датчика 40 расположен на продольной оси 16 узла сканера. Поле обзора излучателя/датчика 40 является линейным в продольном направлении. Поле обзора излучателя/датчика 40 может также быть описано как находящееся в плоскости также содержащей продольную ось 16 узла сканера. В показанной конфигурации плоскость поля обзора излучателя/датчика 40 содержит часть продольной оси 16 узла сканера, проходящую в дистальном направлении от излучателя/датчика 40. Поле 42 обзора излучателя/датчика содержит дистальную границу 44 поля обзора излучателя/датчика, проходящую от дистального конца головки, и содержит проксимальную границу 46 поля обзора излучателя/датчика, расположенную напротив дистальной границы. Поле 42 обзора излучателя/датчика описывается в продольном направлении тупым углом, содержащим удлинение продольной оси 16 узла сканера от дистального конца узла сканера, и содержащим линию 48 в плоскости поля 42 обзора, проходящую от излучателя/датчика 40 в плоскости, перпендикулярной продольной оси 16.
[30] В выбранных конфигурациях острый угол 50 между дистальной границей поля обзора 44 излучателя/датчика и плоскостью, перпендикулярной продольной оси 16 узла сканера и проходящей через излучатель/датчик 40, может иметь значение от 1 градуса включительно до 10 градусов включительно. В выбранных конфигурациях острый угол 52 между проксимальной границей 46 поля обзора 42 излучателя/датчика и продольной осью 16 узла сканера может иметь значение от 70 градусов включительно до 88 градусов включительно.
[31] Излучатель/датчик 40 обычно содержит лазер, оптическую систему, фотоприемник и электронные схемы приемника (не показаны). Такие устройства излучателя/датчика выполнены с возможностью излучать с высокой частотой импульсы света на поверхность цели, некоторые до 500000 импульсов в секунду. Датчик излучателя/датчика 40 выполнен с возможностью измерения количества времени, требуемого для каждого импульса, чтобы вернуться от поверхности цели к сканеру через данное поле обзора. Свет движется с постоянной и известной скоростью так, что информацию, предоставляемую излучателем/датчиком 40 можно использовать для вычисления расстояния между излучателем/датчиком 40 и мишенью с высокой точностью. Путем повторения этого процесса в виде быстрой последовательности посредством включения ориентации излучателя/датчика 40 и положения узла 10 сканера относительно измеряемого сосуда прибор строит сложную «карту» толщины измеряемой огнеупорной поверхности. Путем вычисления и/или сравнения изменений между картами измеренной толщины внутренних поверхностей огнеупорной футеровки и эталонным измерением той же поверхности определяют изменения и оценивают возможные состояния, которые могут привести к повреждению комбинации огнеупорная футеровка/оболочка. Отдельные измерения могут быть выполнены в течение 20-30 секунд.
[32] Излучатель/датчик 40 может содержать лазерный сканер, имеющий малый (около 4 мм) диаметр луча, высокую точность (наибольшую из пиковых ошибок измерения дальности около ± 6 мм), высокие скорости сканирования (до 500000 Гц), надежную конструкцию для промышленных условий и тепловых нагрузок, вызванных при сканировании высокотемпературных поверхностей, безопасную для глаз длину волны (которая устраняет и/или существенно снижает требования техники безопасности на рабочем месте), угол сканирования в вертикальной плоскости ±55°, и угол сканирования в горизонтальной плоскости 0-360°. Такие лазерные сканеры обеспечивают сканирования внутренней части сосуда со стандартной разрешающей способностью примерно за двадцать-тридцать секунд, что приводит к меньшему времени простоя сосуда и более высокой эксплуатационной готовности. В режиме с высоким разрешением сканер может предоставить детализированные изображения сосуда, которые можно использовать для определения параметров огнеупорной футеровки, определения области вокруг летки или состояния продувочной заглушки.
[33] Поле обзора излучателя/датчика в вертикальной плоскости показано как угол 42. Поле 42 обзора излучателя/датчика в вертикальной плоскости во всех положениях вращения головки 32 включает оптическую осевую линию 16 излучателя/датчика и линию 48, которая проходит наружу от излучателя/датчика 40 в горизонтальной плоскости, которая перпендикулярна оптической осевой линии 16 излучателя/датчика.
[34] На Фиг. 3 представлен вид сбоку узла 10 сканера, расположенного таким образом, что проксимальный конец 14 и установочный рычаг 20 ориентированы влево, и таким образом, что головка 32, которая прикреплена к установочному рычагу 20 с возможностью вращения, показана справа. Дистальный конец узла 12 сканера ориентирован вправо. Продольная ось 16 узла сканера на этом виде расположена горизонтально. Показано, что поле обзора 42 излучателя/датчика включает продольную ось 16 узла сканера и линию 48, которая проходит наружу от излучателя/датчика 40 в плоскости, которая перпендикулярна продольной оси 16 узла сканера. Излучатель/датчик 40 экранирован окошком 62 излучателя/датчика. Вокруг по меньшей мере части окружности дистального конца 24 установочного рычага расположен теплозащитный экран 26.
[35] На Фиг. 4 представлен вид в перспективе узла 10 сканера. Головка 32 прикреплена к установочному рычагу 20 с возможностью вращения. Стационарный теплозащитный экран 26 расположен вокруг по меньшей мере части окружности установочного рычага 20. Установочный рычаг 20 выполнен с возможностью неподвижного прикрепления к рычагу манипулятора.
[36] Узел 10 сканера может содержать встроенную систему охлаждения и обширную защиту от излучения, чтобы обеспечить расположение узла 10 сканера как можно ближе (например, в диапазоне от около 2 м до около 3 м) к высокотемпературным (1700°С) поверхностям, что позволяет измерять толщину футеровки в высокотемпературных средах, которые имеют ограниченный оптический доступ, например в генераторе для газификации.
[37] На Фиг. 5 показан вид в вертикальном разрезе манипулятора 80 сканера в сосуде 2, который на этой иллюстрации представляет собой ковш сигарообразной формы. Манипулятор 80 сканера содержит узел 10 сканера, который содержит головку 32 и излучатель/датчик 40. Манипулятор сканера дополнительно содержит продолговатую форму или рычаг 82 манипулятора сканера, имеющий дистальный конец и проксимальный конец, и продольную ось 84 рычага манипулятора, которая может быть параллельна продольной оси узла 10 сканера или лежать с ней на одной прямой и проходит от дистального конца к проксимальному концу рычага манипулятора. В показанной ориентации проксимальные концы узла 10 сканера, манипулятора 80 сканера и рычага 82 манипулятора сканера представляют собой верхние концы; а дистальные концы - нижние концы. Дистальный конец рычага 82 манипулятора неподвижно прикреплен к проксимальному концу узла 10 сканера; и рычаг 82 манипулятора проходит в продольном направлении от узла 10 сканера. Рычаг 82 манипулятора и узел 10 сканера могут быть прикреплены друг к другу торцами; один из рычага 82 манипулятора и узла 10 сканера может содержать приемную часть для приема части вставки другого из рычага 82 манипулятора и узла 10 сканера; или рычаг 82 манипулятора и узел 10 сканера могут быть соединены внахлест.
[38] Манипулятор 80 сканера расположен таким образом, что при вращении головки 32 вокруг продольной оси 16 узла сканера излучатель/датчик может осуществлять обзор всей внутренней части сосуда 2.
[39] Поле обзора излучателя/датчика в продольной плоскости показано как угол 42. Угол 42 представляет собой сумму (а) тупого составляющего угла 86 дистального поля обзора в вертикальной плоскости, ограниченной (i) линией 48, которая проходит наружу от излучателя/датчика 40 в плоскости, которая перпендикулярна продольной оси узла сканера, и (ii) линией, которая проходит наружу от излучателя/датчика 40 через дистальный конец узла 10 сканера (в данном случае соответствующий дистальной границе 44 поля обзора); и (b) острого составляющего угла 88 поля обзора, лежащего в одной плоскости с составляющим углом 86 дистального поля обзора, причем угол 88 ограничен (i) линией 48, которая проходит наружу от излучателя/датчика 40 в плоскости, которая перпендикулярна продольной оси узла сканера, и (ii) линией, которая проходит наружу от излучателя/датчика 40 на противоположной стороне линии 48 от угла 86 (в данном случае соответствующей проксимальной границе 46 поля обзора). Показано, что поле обзора 42 излучателя/датчика включает продольную ось 16 узла сканера и линию 48, которая проходит наружу от излучателя/датчика 40 в плоскости, которая перпендикулярна продольной оси узла сканера, и поле обзора 42 излучателя/датчика в продольной плоскости во всех положениях вращения головки 32 включает часть продольной оси 16 узла сканера, которая проходит в дистальном направлении от излучателя/датчика 40, и часть линии 48, которая проходит наружу от излучателя/датчика 40 в горизонтальной плоскости, которая перпендикулярна продольной оси 16 узла сканера.
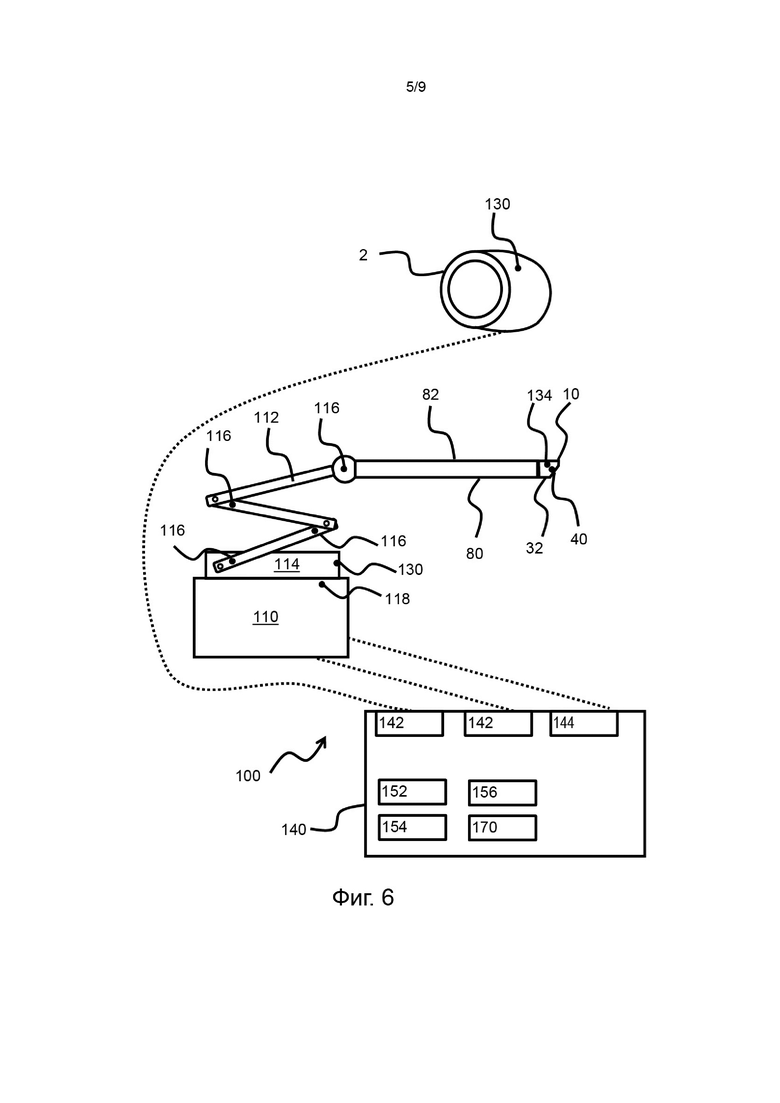
[40] На Фиг. 6 изображена система 100 сканирования для измерения внутренней огнеупорной футеровки сосуда 2. Система содержит узел 10 сканера, содержащий головку 32, в которой размещен излучатель/датчик 40. Узел 10 сканера прикреплен к рычагу 82 манипулятора с образованием манипулятора 80 сканера. Проксимальный конец рычага 82 манипулятора прикреплен к опорному основанию 110 с помощью опорного рычага 112, который выполнен с возможностью перемещения рычага 82 манипулятора в заранее определенные положения и ориентации. Проксимальный конец опорного рычага 112 может быть подвижно соединен с опорным основанием 110. Опорный рычаг 112 платформы может перемещаться, поворачиваться и/или шарнирно перемещаться относительно опорного основания 110. Опорный рычаг 112 может быть прикреплен к опорному основанию 110 посредством платформы 114 опорного основания, которая может перемещаться или вращаться относительно опорного основания 110. Приводы 116 опорного рычага расположены на шарнирных секциях опорного рычага 112 для управления относительными положениями соединенных секций или для управления ориентацией опорного рычага 112 с помощью рычага 82 манипулятора. Проксимальный конец манипулятора 80 сканера может быть подвижно или шарнирно соединен с дистальным концом опорного рычага 12. Манипулятор 80 сканера может перемещаться, вращаться или перемещаться шарнирно относительно опорного рычага 112.
[41] Комбинация опорного основания 110, платформы 114 опорного основания, опорного рычага 112 и рычага 82 манипулятора или аналогичная комбинация элементов, которая перемещает узел 10 сканера, имеет простое требование для перемещения из исходного положения в положение измерения и обратно в исходное положение. Геометрия и размеры манипулятора должны быть выбраны таким образом, чтобы узел 10 сканера можно было разместить в положении измерения для конкретного исследуемого сосуда.
[42] В других конфигурациях системы сканирования могут быть использованы различные комбинации опор, опорных рычагов, соединений и вращательных устройств для перемещения узла 10 сканера в положение измерения. Опорный рычаг 112 и рычаг 82 манипулятора могут быть объединены в узел, в котором опорный рычаг 112 и рычаг 82 манипулятора расположены под прямыми углами, и опорный рычаг 112 содержит шарнир, который связан с опорой.
[43] Датчики 130 могут быть расположены на опорном основании 110, рычаге 82 манипулятора, узле 10 сканера и/или сосуде 2 для предоставления данных для определения положения сосуда относительно независимой системы координат, той самой системы координат, к которой привязана система сканирования, обеспечивающая до шести степеней свободы. Датчики 130, расположенные на сосуде 2, могут представлять собой одноточечные лазерные дальномеры или инклинометры.
[44] Привод 134, который может быть расположен внутри узла 10 сканера, управляет вращательным движением головки 32 относительно установочного рычага узла 10 сканера. Привод 134 управляет угловым положением зеркала, отражающего свет, создаваемый или воспринимаемый излучателем/датчиком 40; причем угол находится в плоскости, включающей продольную ось узла сканера. Привод 134 может содержать микропроцессор и может иметь дополнительные функциональные возможности, используемые в процессе измерения, включая управление медленным движением двигателя сканирования головки 32 вокруг продольной оси 16 узла сканера (азимут), управление быстрым движением двигателя сканирования, устанавливающим угол, вписанный между направлением излучения/восприятия излучателя/датчика 40 и продольной осью 16 узла сканера (угол наклона), возбуждение лазера, вычисление данных о дальности и буферизацию данных, а также окончательную передачу данных о дальности на устройство 140 управления.
[45] Устройство 140 управления связано с возможностью передачи данных с датчиками 130 и излучателем/датчиком 40, расположенными на комбинации опорного основания 110, рычага 82 манипулятора и узла 10 сканера. Обмен данными может осуществляться посредством физического соединения или беспроводной передачи. В некоторых конфигурациях устройство 140 управления связано с возможностью передачи данных с одним или более датчиками 130, установленными на сосуде 2.
[46] Устройство 140 управления принимает входные данные от датчиков 130 и от излучателя/датчика 40 в комбинации из опорного основания 110, рычага 82 манипулятора и узла 10 сканера. В некоторых конфигурациях устройство 140 управления принимает входные данные от одного или более датчиков 130, установленных на сосуде 2. Данные принимаются через один или более портов 142 для входных данных.
[47] Устройство 140 управления передает команды на один или более приводов 134, расположенных в узле 10 сканера, для перемещения компонентов относительно друг друга в узле 10 сканера, на приводы 116 опорного рычага для перемещения компонентов опорного рычага 112 относительно друг друга и на привод 118 платформы опорного основания для перемещения платформы 114 опорного основания относительно остальной части опорного основания 110. Команды приводов передаются от устройства 140 управления через один или более управляющих выходных портов 144 на приводы. Устройство 140 управления выполнено с возможностью, путем передачи команд на приводы 116, 118 и 134, задействования шести степеней свободы для расположения узла 10 сканера в заранее определенном местоположении и ориентации с точностью, соизмеримой с общей погрешностью измерения. Общая точность может быть определена либо посредством передачи команд на приводы для перемещения к механическому ограничителю, причем ограничитель ограничивает дальнейшее перемещение, либо в положение, определяемое путем измерения положения рычага с использованием комбинации линейных кодеров или кодовых угломеров, в зависимости от обстоятельств. Приводы 116, 118 и 134 могут содержать серводвигатели и/или гидравлические приводы.
[48] Устройство 140 управления содержит интерфейс 152 человек/система для ввода и отображения данных, который может содержать такие устройства, как клавиатура, экран дисплея, сенсорный экран, индикаторы, а также устройства и поверхности управления.
[49] Устройство 140 управления содержит устройство 154 хранения данных, такое как ОЗУ или жесткий диск, в котором хранятся данные, полученные датчиками 130, излучателем/датчиком 40, хранятся данные, которые будут использоваться при выполнении вычислений, хранятся программы команд и управления для движения элементов устройства, таких как приводы 116, 118 и 134, и хранятся программы расчета для обработки полученных данных.
[50] Устройство 140 управления содержит буфер 156 данных, который временно хранит данные, полученные через порт 142 загрузки данных, до тех пор, пока они не будут размещены устройством 154 хранения данных.
[51] Устройство 140 управления содержит процессор 170, который преобразует запрограммированные инструкции в команды и обрабатывает полученные данные. Процессор 170 преобразует информацию о положении, относящуюся к местоположению сосуда 2 и относящуюся к местоположению излучателя/датчика 40, в общую систему координат.
[52] Как совокупно изображено на Фиг. 1-6, устройство 140 управления выдает команду на выполнение измерения, а привод 134 или микропроцессор внутри узла 10 сканера управляет процессом измерения, включая медленное движение двигателя сканирования головки 32 вокруг продольной оси 16 узла сканера (азимут), быстрое движение двигателя сканирования, устанавливающее угол, вписанный между направлением излучения/восприятия излучателя/датчика 40 и продольной осью 16 узла сканера (угол наклона), возбуждение лазера, вычисление данных о дальности и буферизацию данных, а также окончательную передачу данных о дальности на устройство 140 управления. В примере способа работы узел сканера может быть ориентирован по заданному азимуту, и измерения производят в диапазоне значений угла наклона. Процесс повторяется для диапазона значений азимута.
[53] Излучатель/датчик 40 представляет собой технологию дистанционного измерения, которая измеряет расстояние путем освещения цели лазером и измерения времени распространения фотонов, излучаемых лазерным источником для прохождения расстояния туда и обратно между источником и отражающей поверхностью дистального поля. Типичный трехмерный излучатель/датчик 40 содержит лазер, сканер, оптическую систему, фотодетектор и электронные схемы приемника. Специалистам в данной области техники будет понятно после обзора раскрытого в данном документе объекта изобретения, что в излучателе/датчике 40 можно использовать различные типы лазеров, включая лазеры, имеющие разные длины волн, а также разные режимы работы (например, импульсный или непрерывный типы). Точность и разрешающая способность параметров и измерения износа футеровки сосуда 2 будут зависеть от того, как лазер в излучателе/датчике 40 фокусируется посредством оптической системы, которая также будет определять поле обзора излучателя/датчика 40. Более высокая разрешающая способность может быть достигнута с помощью более коротких импульсов при условии, что приемник-детектор и электронные схемы обладают достаточной полосой пропускания, чтобы справиться с уменьшенной шириной импульса. На скорость проявления изображений влияет скорость, с которой они могут быть отсканированы в систему. Доступны различные способы сканирования для сканирования луча через требуемые углы наклона. Точное расположение зеркала влияет на точность измерения.
[54] Кроме того, устройство 140 управления системы 100 лазерного сканирования может содержать процессор 170 для обработки параметров износа и измерения температуры поверхности. Процессор 170 может быть встроен в систему 100 лазерного сканирования или соединен с ней. Типичный излучатель/датчик 40 лазерного дальномера содержит узел, состоящий из импульсного лазера, способа обнаружения события лазерного излучения, многогранного зеркала, высокоскоростного детектора для обнаружения света, отражаемого от поверхности дистального поля, и двигателя или привода для медленного вращения вышеупомянутого узла через интересующее место события. На практике лазер и детекторы работают вместе для измерения расстояния, а зеркало/двигатель направляют лазер для создания растрового изображения через место события. Кодеры с высокой разрешающей способностью обычно используют для определения углового положения вращения быстрой развертки (угол наклона) (а также оси медленной развертки с такой же разрешающей способностью).
[55] В одной конфигурации система 100 лазерного сканирования содержит излучатель/датчик 40, имеющий малый (около 3,6 мм) диаметр луча, высокую точность (наибольшую из пиковых ошибок измерения дальности около 6 мм), высокие скорости сканирования (примерно до 500000 Гц), надежную конструкцию для промышленных условий и тепловых нагрузок, вызванных при сканировании высокотемпературных поверхностей, безопасную для глаз длину волны (которая устраняет и/или существенно снижает требования техники безопасности на рабочем месте), возможность установки в узле сканера для создания диапазона углов сканирования в вертикальной плоскости от +95° до -15° и диапазона углов сканирования в горизонтальной плоскости от 0° до 360°. Такой лазерный сканер обеспечивает сканирования внутренней части сосуда со стандартной разрешающей способностью примерно за 6-10 секунд, что приводит к меньшему времени простоя сосуда и более высокой эксплуатационной готовности. В режиме с высоким разрешением сканер может предоставить детализированные изображения сосуда, которые можно использовать для обнаружения трещин, определения области вокруг летки или состояния продувочной заглушки. Датчики на приборе измеряют количество времени, которое требуется каждому лазерному импульсу, чтобы покинуть его, переместиться к поверхности дистального поля и, после отражения, вернуться от поверхности цели к сканеру. Свет движется с постоянной и известной скоростью, поэтому излучатель/датчик 40 может предоставлять данные, позволяющие с высокой точностью рассчитать расстояние между излучателем/датчиком 40 и целью. Путем повторения с небольшими интервалами прибор строит «карту» расстояний измеряемой им поверхности. Путем расчета и/или сравнения изменений между картами измеренных расстояний огнеупорного материала 6 с эталонным результатом измерения тех же поверхностей обнаруживают изменения толщины футеровки или топологии поверхности, которые могут привести к повреждению контейнера 2.
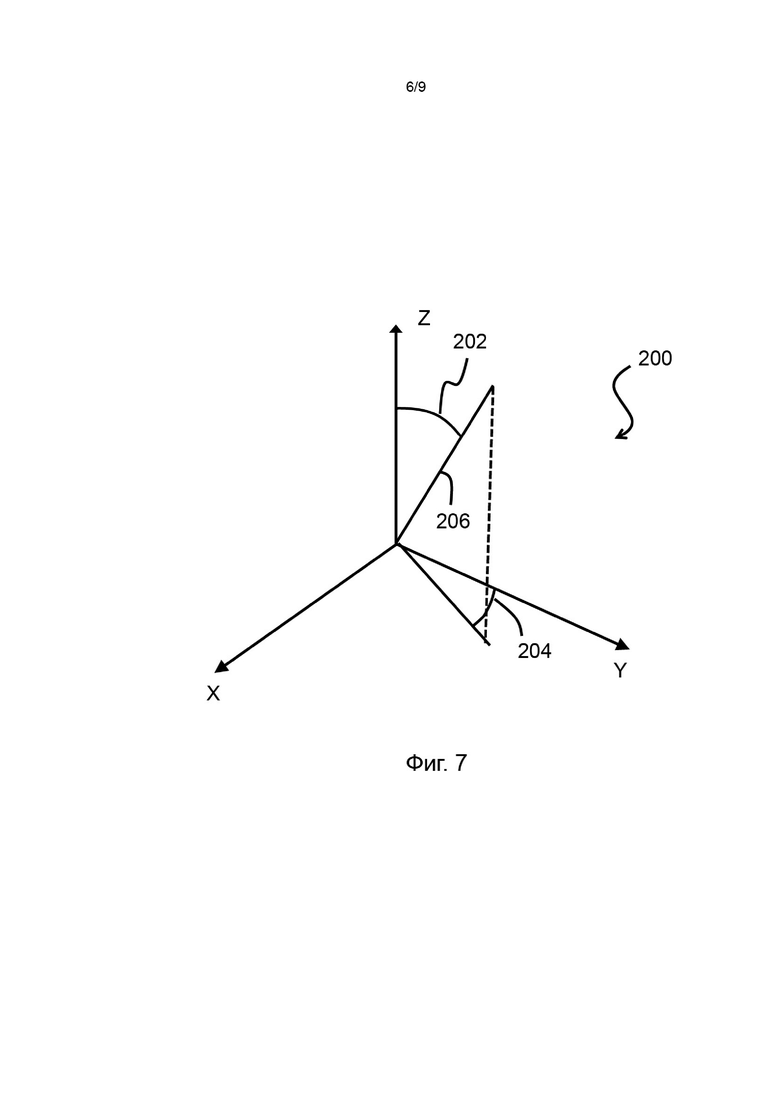
[56] На Фиг. 7 представлено схематическое изображение сферической системы 200 координат. Угол 202 представляет собой тета (θ), полярный угол, измеренный от фиксированного зенитного направления Z. Угол 204 представляет собой фи (ϕ), азимутальный угол перпендикулярной проекции полярного угла на эталонную плоскость, которая проходит через начало координат и перпендикулярна зенитному направлению, измеренному от фиксированного эталонного направления Y. Длина 206 представляет собой r, радиальное расстояние от точки до фиксированного начала системы координат.
[57] Поле обзора узла 10 сканера можно описать с точки зрения сферической системы 200 координат. Если узел 10 сканера выровнен таким образом, что дистальный конец 14 узла сканера соответствует положительному направлению оси Z, и проксимальный конец 12 узла сканера соответствует отрицательному направлению оси Z, а продольная ось 16 узла сканера расположена таким образом, чтобы соответствовать оси Z, поле обзора узла 10 сканера включает в себя все значения фи от 0 градусов до 360 градусов (т.е. сканер может свободно вращаться вокруг оси Z) и все значения тета от 0 градусов до 90 градусов, включая положительную протяженность оси Z и плоскость XY при вращении головки вокруг оси Z. Дополнительные значения тета, которые могут быть включены в поле обзора, составляют: -10°, -9°, -8°, -7°, -6°, -5°, -4°, -3°, -2°, -1°, 91°, 92°, 93°, 94°, 95°, 96°, 97°, 98°, 99°, 100°, 101°, 102°, 103°, 104° и 105°. В некоторых конфигурациях дистальная граница 44 поля обзора излучателя/датчика, проксимальная граница 46 поля обзора излучателя/датчика остаются постоянными при вращении излучателя/датчика 40 вокруг оси X.
[58] Узел 10 сканера разработан так, что имеет, наряду с дистальным концом узла сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью узла сканера, совпадающей с осью Z полярной системы координат, при вращении головки через все значения фи в полярной системе координат от 0 градусов включительно до 360 градусов включительно, поле обзора, включающее при всех значениях фи по меньшей мере все значения тета в полярной системе координат от 0 градусов включительно до 91 градуса включительно.
[59] Альтернативно, узел 10 сканера имеет, наряду с дистальным концом узла сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью узла сканера, совпадающей с осью Z полярной системы координат, при вращении головки через все значения фи в полярной системе координат от 0 градусов включительно и до 360 градусов включительно, поле обзора, которое является симметричным относительно оси Z и выходит за пределы полусферы. Поле обзора выходит за пределы полусферы в том смысле, что оно включает полусферическую часть, а также проходит от места пересечения с осью Z до значения тета, превышающего 90 градусов.
[60] Раскрытые в данном документе узел сканера и манипулятор сканера выполнены с возможностью сведения к минимуму глубины, на которую они должны быть вставлены в сосуд, внутренняя часть которого полностью вогнута в продольном и поперечном разрезах. Если все углы тета, измеренные от оси X в сферической системе координат, имеющей устье сосуда в качестве его плоскости YZ, находятся в диапазоне от 90 градусов до 270 градусов для сосуда, узел сканера можно разместить где-либо за пределами сосуда на продольной оси сосуда. Если внутренняя часть сосуда имеет углы тета менее 90 градусов или более 270 градусов, измеренные таким образом, узел сканера должен быть размещен ближе к устью сосуда, поскольку значения тета уменьшаются от 90 градусов или увеличиваются от 270 градусов.
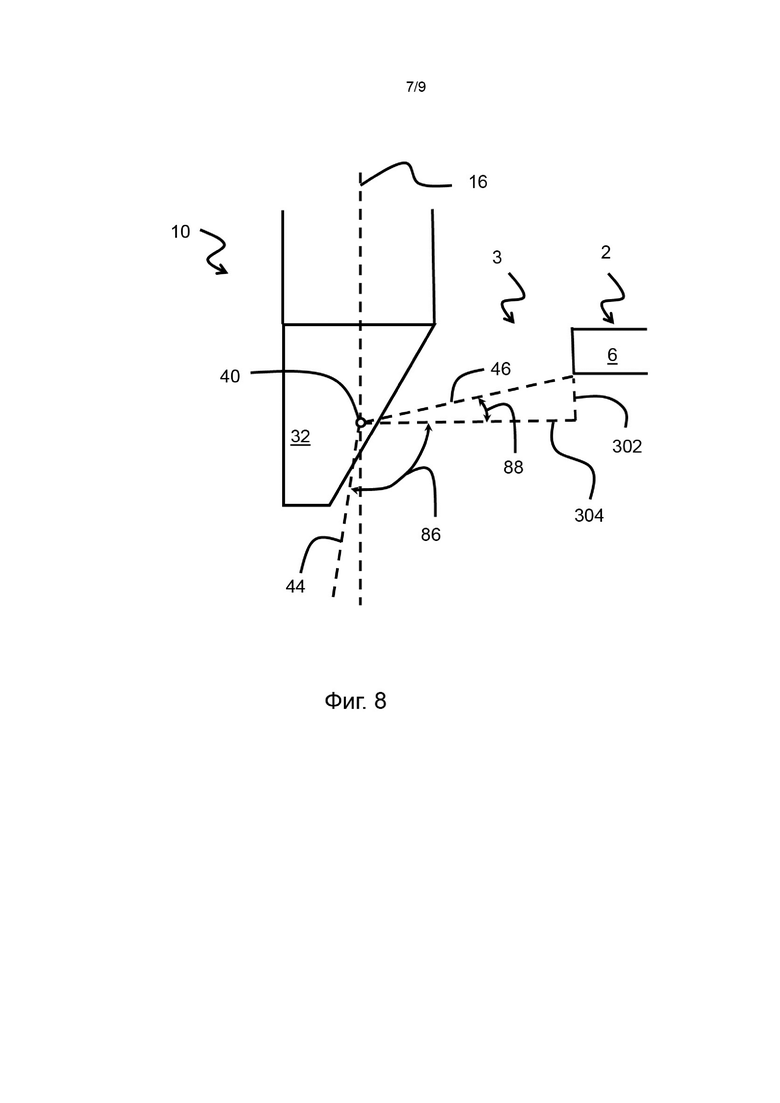
[61] Если значения угла тета для сосуда приближаются к 0 градусов или 360 градусам, узел сканера и манипулятор сканера должны быть вставлены в устье сосуда для сканирования всей внутренней части. На Фиг. 8 показан узел 10 сканера, используемый для сканирования внутренней части сосуда 2, имеющего внутренний слой 6 огнеупорного материала. Участок внутреннего слоя 6 огнеупорного материала в непосредственной близости от отверстия 3 сосуда перпендикулярен продольной оси сосуда и продольной оси 16 узла сканера. Головка 32 сканера содержит излучатель/датчик 40, имеющий дистальную границу 44 поля обзора излучателя/датчика и проксимальную границу 46 поля обзора излучателя/датчика. Угол 86 представляет собой дистальную составляющую угла поля обзора в плоскости, содержащей продольную ось 16 узла сканера. Угол 88 представляет собой проксимальную составляющую угла поля обзора в плоскости, содержащей продольную ось 16 узла сканера. Пересечение углов 86 и 88 представляет собой линию, проходящую в плоскости, перпендикулярной продольной оси 16 узла сканера.
[62] Требуемую протяженность вставки 302 излучателя/датчика 40 в сосуд 2 можно определить по углу 88 и расстоянию 304 излучателя/датчика 40 в плоскости, перпендикулярной продольной оси 16 узла сканера, от внутреннего слоя 6. В следующей формуле угол 88 представлен как альфа, расстояние 304 представлено как x, а требуемая протяженность вставки 302 представлена как z:
[63] z = x (tan α)
[64] Эти значения получены для особого случая, в сосуде, у которого внутренняя часть полностью вогнута в продольном и поперечном разрезах, в котором часть внутреннего слоя огнеупорного материала 6 в непосредственной близости от отверстия 3 сосуда имеет значения угла тета, по существу равные 0° или 360°. Для сосудов, внутренняя часть которых полностью вогнута в продольном и поперечном разрезах и в которых значения тета близки к 90° или 270°, требуемая протяженность вставки будет намного меньше.
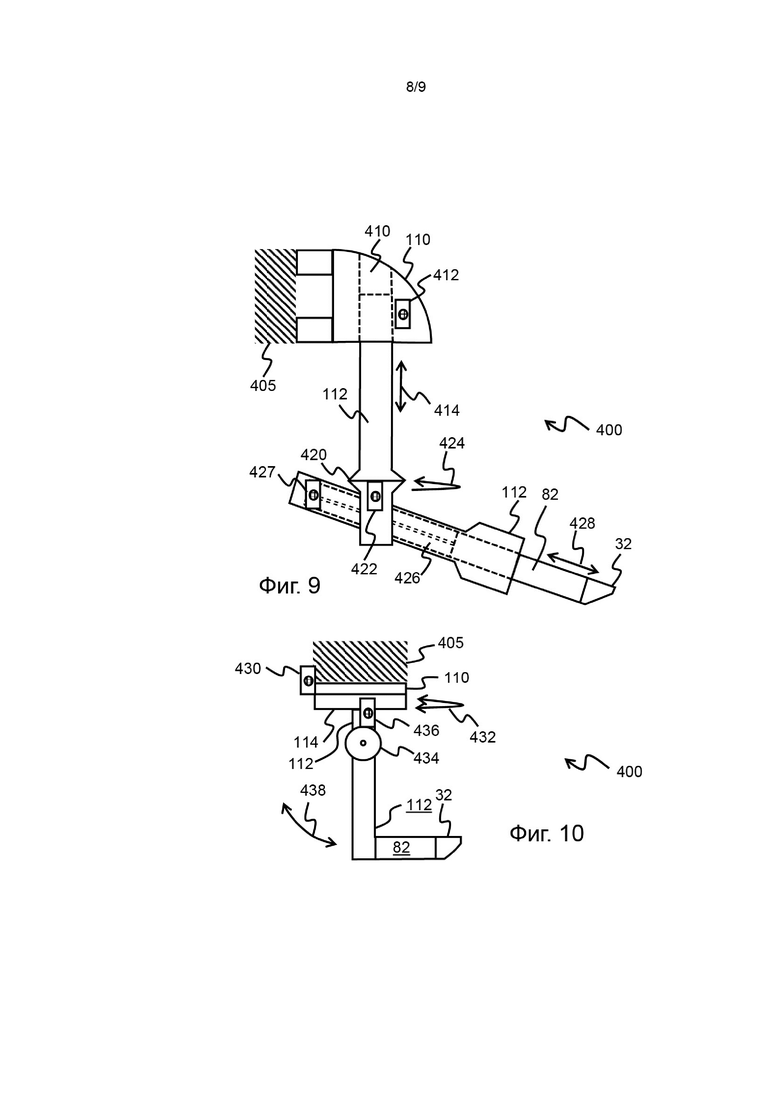
[65] На Фиг. 9 представлено схематическое изображение механической части 400 сканирующей системы в соответствии с данным изобретением. Поверхность 405 поддерживает опорное основание 110. Канал 410 опорного основания, изображенный на этом изображении вертикальным, проходит через опорное основание 110. Канал опорного основания вмещает верхний конец первого опорного рычага 112. Линейное движение первого опорного рычага 112 в канале 410 опорного основания осуществляется и создается приводом 412. Привод 412 может содержать реечную передачу или любой другой механизм, выполненный с возможностью создания относительного линейного движения первого опорного рычага 112 в канале 410 опорного основания. Стрелка 414 показывает направление движения первого опорного рычага 112 в канале 410 опорного основания.
[66] Нижний конец первого опорного рычага 112 прикреплен к верхнему концу первого опорного рычага 112 через вращаемое соединение 420. Вращение нижнего конца первого опорного рычага 112 относительно верхнего конца первого опорного рычага 112 осуществляется и создается приводом 422. Привод 422 может содержать шаговый двигатель или любой другой механизм, выполненный с возможностью создания определенного и точного вращательного движения. Стрелка 424 показывает направление вращения нижнего конца первого опорного рычага 112.
[67] Нижний конец первого опорного рычага 112 выполнен с возможностью удержания продольной поверхности второго опорного рычага 112. Как изображено, второй опорный рычаг 112 расположен таким образом, чтобы открытый конец был ниже закрытого конца. Второй опорный рычаг 112 может быть размещен в горизонтальном положении или под любым углом к горизонтальной плоскости. Второй опорный рычаг 112 содержит канал 426 опорного рычага, который вмещает манипулятор сканера, имеющий рычаг 82 манипулятора и головку 32. Привод 427 осуществляет и создает убирание рычага 82 манипулятора в канал 426 опорного рычага и выдвигание из него. Привод 427 может содержать реечную передачу или любой другой механизм, выполненный с возможностью создания относительного линейного движения. Стрелка 428 показывает направление движения рычага 82 манипулятора в канале 426 опорного рычага.
[68] На Фиг. 10 представлено схематическое изображение механической части 400 сканирующей системы в соответствии с данным изобретением. Поверхность 405 поддерживает опорное основание 110. Опорное основание 110 прикреплено к платформе 114 опорного основания через вращаемое соединение 420. Вращение платформы 114 опорного основания относительно опорного основания 110 осуществляется и создается приводом 430. Привод 430 может содержать шаговый двигатель или любой другой механизм, выполненный с возможностью создания определенного и точного вращательного движения. Стрелка 432 показывает направление вращения платформы 114 опорного основания.
[69] Первый опорный рычаг 112 проходит вниз от платформы 114 опорного основания. Первый опорный рычаг 112 соединен со вторым опорным рычагом 112 с помощью шарнира 434. Привод 436 осуществляет и создает вращательное движение второго опорного рычага 112 вокруг оси шарнира 434. Стрелка 438 показывает направление движения второго опорного рычага 112 вокруг оси 434. Второй опорный рычаг 112 присоединен к проксимальному концу рычага 82 манипулятора. Соединение второго опорного рычага 112 с проксимальным концом рычага 82 манипулятора изображено под прямым углом; оно может принимать любую форму, ускоряющую сканирование сосуда; оно может быть фиксированным или регулируемым. Второй опорный рычаг 112 и рычаг 82 манипулятора могут быть выполнены как одно целое. Второй опорный рычаг 112 может содержать дополнительный шарнир и привод для обеспечения дополнительных степеней свободы движения.
[70] В варианте механической части 400 изображенной сканирующей системы платформа 114 основания и привод 430 опущены, а второй опорный рычаг 112 напрямую связан с опорным основанием 110.
[71] На Фиг. 11 представлен вид в перспективе механической части сканирующей системы 400 в соответствии с данным изобретением, опирающейся на опорное основание 110. Опорное основание 110 прикреплено к платформе 114 опорного основания посредством вращаемого соединения 420. Вращение платформы 114 опорного основания относительно опорного основания 110 осуществляется и создается приводом 430. Привод 430 может содержать шаговый двигатель или любой другой механизм, выполненный с возможностью создания определенного и точного вращательного движения. Стрелка 432 показывает направление вращения платформы 114 опорного основания.
[72] Первый опорный рычаг 112 проходит вверх от платформы 114 опорного основания. Первый опорный рычаг 112 соединен со вторым опорным рычагом 112 с помощью шарнира 434. Привод 436 осуществляет и создает вращательное движение второго опорного рычага 112 вокруг оси шарнира 434. Стрелка 438 показывает направление движения второго опорного рычага 112 вокруг оси 434. Вращательным движением второго опорного рычага 112 вокруг оси шарнира 434 могут управлять серводвигатели и/или гидравлический привод.
[73] Второй опорный рычаг 112 имеет открытый конец и содержит внутренний канал опорного рычага, который телескопически вмещает третий опорный рычаг 112. Третий опорный рычаг 112 имеет открытый конец и содержит внутренний канал опорного рычага, который телескопически вмещает манипулятор сканера, имеющий рычаг 82 манипулятора и головку 32. Привод 440 осуществляет и создает втягивание рычага 82 манипулятора в канал опорного рычага третьего опорного рычага 112 и выдвигание из него, а также втягивание третьего опорного рычага 112 в канал опорного рычага второго опорного рычага 112 и выдвигание из него. Привод 440 может содержать реечную передачу или любой другой механизм, выполненный с возможностью создания относительного линейного движения. Стрелка 442 показывает направление движения третьего опорного рычага 112 в канал опорного рычага второго опорного рычага 112 и из него. Стрелка 428 показывает направление движения рычага 82 манипулятора в канал опорного рычага третьего опорного рычага 112 и из него.
[74] На Фиг. 12 представлено схематическое изображение механической части 400 сканирующей системы в соответствии с данным изобретением. Шарнир 434 поддерживается поверхностью 405 или на ней. Привод 436 обеспечивает вращение опорного рычага 112 на его проксимальном конце из вертикального положения (положения хранения, обозначенного сплошными линиями) в горизонтальное рабочее положение, обозначенное штриховыми линиями. Стрелка 438 показывает направление движения опорного рычага 112 между вертикальным положением и горизонтальным положением.
[75] Опорный рычаг 112 на своем дистальном конце соединен с проксимальным концом рычага 82 манипулятора, имеющего головку 32 на своем дистальном конце, посредством вращаемого соединения 420. Вращение вращаемого соединения 420 происходит вокруг оси, которая перпендикулярна продольной оси опорного рычага 112 и перпендикулярна продольной оси рычага 82 манипулятора, и осуществляется и создается приводом 422. Привод 422 может содержать шаговый двигатель или любой другой механизм, выполненный с возможностью создания определенного и точного вращательного движения. Стрелка 424 показывает направление вращения нижнего конца первого опорного рычага 112 в горизонтальном рабочем положении механической части 400 сканирующей системы.
[76] Следующий процесс используют для выполнения измерений в сосуде. Сосуд опорожняют и удаляют посторонний материал. Затем определяют положение сосуда, либо путем счисления пути (сосуд размещают в одном и том же положении при каждом измерении) или путем использования внешних датчиков. Затем сосуд ориентируют таким образом, чтобы представляющая интерес поверхность внутри сосуда могла находиться в поле обзора узла сканера, прикрепленного к манипулятору сканера. Манипулятор сканера размещают в положении измерения, обычно в положении на продольной оси сосуда, проходящей через отверстие сосуда, или вблизи нее. Головку манипулятора сканера вращают вокруг продольной оси узла сканера; выполняют измерения и генерируют профиль внутренней поверхности сосуда. Профиль внутренней поверхности сосуда сравнивают с эталонным массивом данных или с созданной трехмерной моделью сосуда. Сравнение позволяет обнаружить области, в которых наблюдается износ или где появились отложения.
[77] Способ измерения износа в огнеупорной футеровке включает:
a) опорожнение сосуда, содержащего футеровку;
b) установку сосуда в требуемое положение;
c) ориентирование сосуда таким образом, чтобы представляющая интерес поверхность футеровки внутри сосуда могла находиться в поле обзора узла сканера;
d) обеспечение наличия узла сканера, содержащего установочный рычаг; головку, прикрепленную к установочному рычагу с возможностью вращения и излучатель/датчик, расположенный внутри головки; причем узел сканера имеет, наряду с дистальным концом узла сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью узла сканера, совпадающей с осью Z полярной системы координат, при вращении головки через все значения фи в полярной системе координат от 0 градусов включительно и до 360 градусов включительно, поле обзора, которое является симметричным относительно оси Z и выходит за пределы полусферы;
e) установку узла сканера в положение измерения;
f) приведение в действие излучателя/датчика;
g) вращение головки через все значения фи в полярной системе координат;
h) получение для выбранных значений фи данных для выбранных значений тета в полярной системе координат;
i) сбор данных, предоставленных излучателем/датчиком; и
j) генерирование из собранных данных профиля внутренней поверхности сосуда.
[78] Узел сканера для измерения износа в огнеупорной футеровке содержит:
дистальный конец, проксимальный конец и продольную ось, проходящую от проксимального конца к дистальному концу;
установочный рычаг, имеющий проксимальный конец и дистальный конец, расположенный на проксимальном конце узла сканера;
головку, имеющую проксимальный конец и дистальный конец, причем дистальный конец установочного рычага присоединен с возможностью вращения к проксимальному концу головки, причем связь между установочным рычагом и головкой может находиться в плоскости, перпендикулярной продольной оси; и
излучатель/датчик, установленный в неподвижном положении в головке;
причем оптический центр излучателя/датчика расположен на продольной оси;
причем поле обзора излучателя/датчика является линейным в продольном направлении;
причем поле обзора содержит дистальную границу, проходящую от дистального конца головки, и содержит проксимальную границу, расположенную напротив дистального конца;
и причем поле обзора излучателя/датчика описывается в продольном направлении тупым углом, содержащим удлинение продольной оси узла сканера от дистального конца узла сканера, и содержащим линию в плоскости поля обзора, проходящую от излучателя/датчика в плоскости, перпендикулярной продольной оси.
Узел сканера может быть выполнен таким образом, что поворотное соединение дистального конца установочного рычага с проксимальным концом головки обеспечивает возможность вращения на 360 градусов вокруг продольной оси узла сканера. Узел сканера может быть выполнен таким образом, что поле обзора излучателя/датчика лежит в плоскости, которая содержит продольную ось излучателя/датчика. Узел сканера может содержать теплозащитный экран, который расположен над по меньшей мере частью окружности дистального конца установочного рычага. Узел сканера может содержать один излучатель/датчик; узел сканера может не включать второй излучатель/датчик; количество излучателей/датчиков в узле сканера может быть равно одному.
[79] Узел может быть выполнен таким образом, что острый угол, представленный дистальной границей поля обзора излучателя/датчика и продольной осью имеет значение от 1 градуса включительно до 10 градусов включительно. Узел сканера может быть выполнен таким образом, что острый угол, представленный проксимальной границей поля обзора излучателя/датчика и продольной осью имеет значение от 70 градусов включительно до 88 градусов включительно.
[80] Узел сканера может быть выполнен таким образом, что он не взаимодействует с устройством для нанесения огнеупорных материалов или таким образом, что он не является частью устройства, содержащего устройство для нанесения огнеупорных материалов. Устройство для нанесения огнеупорных материалов представляет собой устройство, выполненное с возможностью разбрызгивания, распыления с помощью краскопульта или подачи иным способом материала на поверхность таким образом, чтобы материал прилипал к поверхности. Узел сканера может быть выполнен таким образом, что вращение головки около установочного рычага ограничено вокруг любой оси, отличной от продольной оси узла сканера.
[81] Узел сканера может быть выполнен таким образом, что наряду с дистальным концом узла сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью узла сканера, совпадающей с осью Z полярной системы координат, в момент вращения головки через все значения фи в полярной системе координат от 0 градусов включительно и до 360 градусов включительно, узел сканера имеет поле обзора, включающее полностью все значения фи, все значения тета в полярной системе координат от 0 градусов включительно до 91 градуса включительно.
[82] Узел сканера может быть выполнен таким образом, что наряду с дистальным концом узла сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью узла сканера, совпадающей с осью Z полярной системы координат, при вращении головки через все значения фи в полярной системе координат от 0 градусов включительно и до 360 градусов включительно, узел сканера имеет поле обзора, которое является симметричным относительно оси Z и выходит за пределы полусферы.
[83] Манипулятор сканера, содержащий узел сканера по любому одному или более из описанного выше, может быть выполнен таким образом, что манипулятор сканера дополнительно содержит продолговатую форму или рычаг манипулятора сканера, имеющий дистальный конец и проксимальный конец, а также продольную ось, лежащую на одной прямой с продольной осью узла сканера и проходит от дистального конца к проксимальному концу; причем дистальный конец манипулятора сканера неподвижно прикреплен к проксимальному концу узла сканера; и причем продолговатая форма или рычаг манипулятора сканера проходит в продольном направлении от узла сканера.
[84] В раскрытых примерах вариантов реализации предложены устройства, способы и системы для автономного определения параметров огнеупорной футеровки металлургического резервуара, а также другие вышеуказанные варианты использования, кратко изложенные и понятные специалистам в соответствующих областях техники. Следует понимать, что данное описание не предназначено для ограничения объема данного изобретения. Напротив, примеры вариантов реализации предназначены для охвата альтернатив, модификаций и эквивалентов, которые включены в сущность и объем данного изобретения, как это определено прилагаемой формулой изобретения. Кроме того, в подробном описании примеров вариантов реализации, многочисленные конкретные подробности изложены в таком порядке, чтобы обеспечить всестороннее понимание заявленного изобретения. Однако, для специалиста в данной области техники будет очевидно, что различные варианты реализации могут быть реализованы на практике без таких конкретных подробностей.
[85] Хотя признаки и элементы данных примеров вариантов реализации описаны в вариантах реализации в конкретных комбинациях, каждый признак или элемент можно использовать отдельно без других признаков и элементов вариантов реализации или в различных комбинациях с другими признаками и элементами, описанными в данном документе, или без них.
[86] В данном письменном описании используются примеры объекта изобретения, описанные таким образом, чтобы позволить специалисту в данной области техники реализовать на практике такой же, включая изготовление и использование любых устройств или систем, или выполнения любых включенных в него способов. Подлежащий патентованию объем объекта изобретения определяется формулой изобретения и может включать в себя другие примеры, которые имеют место для специалистов в данной области техники. Такие другие примеры предназначены для включения в объем формулы изобретения.
[87] Хотя описанные варианты реализации объекта изобретения, описанные в данном документе, показаны на графических материалах и полностью описаны выше конкретным и подробным образом в сочетании с несколькими примерами вариантов реализации, для специалистов в данной области техники будет очевидно, что возможно множество модификаций, изменений и упущений без существенного отступления от новых идей, принципов и концепций, изложенных в данном документе, при этом преимущества объекта изобретения перечислены в прилагаемой формуле изобретения. Тем не менее, соответствующий объем раскрытых инноваций следует определять исключительно широкой интерпретацией прилагаемой формулы изобретения, чтобы охватить все такие модификации, изменения и упущения. Кроме того, порядок или последовательность этапов любого процесса или способа может быть изменена или переупорядочена в соответствии с альтернативными вариантами реализации. В заключение, в формуле изобретения любой пункт «средство плюс функция» предназначен для охвата структур, описанных в данном документе, как выполняющих перечисленную функцию, и не только структурных эквивалентов, но также и эквивалентных структур.
[88] ЭЛЕМЕНТЫ
2. Сосуд
3. Продольная ось сосуда
4. Оболочка
6. Слой огнеупорного материала
7. Первоначальный слой огнеупорного материала
8. Отверстие
10. Узел сканера
12. Проксимальный конец узла сканера
14. Дистальный конец узла сканера
16. Продольная ось узла сканера
20. Установочный рычаг
22. Проксимальный конец установочного рычага
24. Дистальный конец установочного рычага
26. Теплозащитный экран
28. Проксимальный конец теплозащитного экрана
30. Дистальный конец теплозащитного экрана
32. Головка
34. Проксимальный конец головки
36. Дистальный конец головки
40. Излучатель/датчик
42. Поле обзора излучателя/датчика
44. Дистальная граница поля обзора излучателя/датчика
46. Проксимальная граница поля обзора излучателя/датчика
48. Линия, проходящая от излучателя/датчика в плоскости, перпендикулярной продольной оси
50. Острый угол между проксимальной границей поля обзора излучателя/датчика и линией, проходящей от излучателя/датчика в плоскости, перпендикулярной продольной оси
52. Острый угол между дистальной границей поля обзора излучателя/датчика и продольной осью узла сканера
54. Острый угол между проксимальной границей поля обзора излучателя/датчика и продольной осью узла сканера
62. Окошко излучателя/датчика
80. Манипулятор сканера
82. Рычаг манипулятора
84. Продольная ось (оптическая осевая линия сканера) рычага манипулятора
86. Составляющий угол дистального поля обзора
88. Составляющий угол проксимального поля обзора
100. Сканирующая система
110. Опорное основание
112. Опорный рычаг
114. Платформа опорного основания
116. Привод опорного рычага
118. Привод платформы опорного основания
130. Датчик положения
134. Привод манипулятора
140. Устройство управления
142. Порт для входных данных
144. Управляющий выходной порт
152. Интерфейс человек/система
154. Устройство хранения данных
170. Процессор
200. Сферическая система координат
202. Угол тета (θ)
204. Угол фи (ϕ)
206. Радиальное расстояние r
302. Протяженность вставки излучателя/датчика в сосуд
304. Расстояние излучателя/датчика от горизонтальной внутренней поверхности стенки в отверстии
400. Механическая часть сканирующей системы
405. Поверхность
410. Канал опорного основания
412. Привод
414. Направление перемещения
420. Вращаемое соединение
422. Привод
424. Направление вращения
426. Канал опорного рычага
428. Направление перемещения
430. Привод
432. Направление вращения
434. Шарнир
436. Привод
438. Направление вращения
440. Привод
442. Направление перемещения.
Группа изобретений относится к устройствам, способам и системам, а более конкретно к устройствам, процессам, механизмам и методам для определения параметров внутренней огнеупорной футеровки металлургических сосудов. Узел 10 сканера, выполненный с возможностью установки на рычаге 82 манипулятора сканера для размещения в непосредственной близости от отверстия в сосуде или вставки в отверстие в сосуде, а также для измерения расстояния от излучателя/датчика 40 внутри узла 10 сканера до множества точек поверхности огнеупорной футеровки для определения параметров вогнутой внутренней поверхности сосуда за одно сканирование. Манипулятор сканера, имеющий рычаг манипулятора и прикрепленный к узлу сканера, удерживает узел сканера в положениях для измерения. Система управления управляет положением узла сканера, положением излучателя/датчика и сбором, хранением, обработкой и представлением результатов измерений, генерируемых излучателем/датчиком. Поле обзора, полученное от узла 10 сканера за одно сканирование, выходит за пределы полусферы. Технический результат – уменьшение количества сканирований и, следовательно, времени измерений, необходимого для получения результатов измерения толщины огнеупорной футеровки в металлических сосудах, выполненных с возможностью транспортировки материалов с температурой выше температуры плавления металла, что приводит к уменьшению воздействия на сканер внутренних условий измеряемого сосуда. 4 н. и 10 з.п. ф-лы, 12 ил.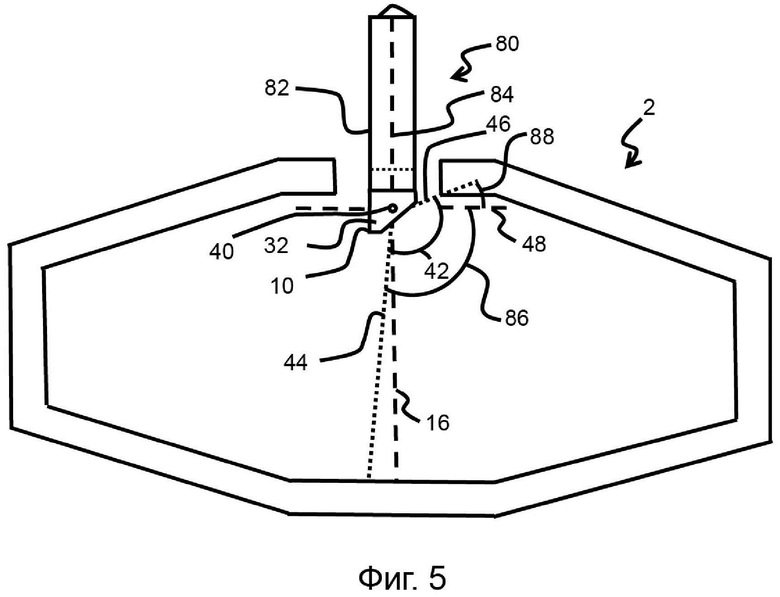
1. Узел 10 сканера для измерения износа огнеупорной футеровки, содержащий первый проксимальный конец 12, первый дистальный конец 14, и продольную ось 16, проходящую от первого проксимального конца 12 к первому дистальному концу 14;
установочный рычаг 20, имеющий второй проксимальный конец 22 и второй дистальный конец 24 и расположенный на первом дистальном конце 14 узла 10 сканера; головку 32, имеющую третий проксимальный конец 34 и третий дистальный конец 36, причем третий проксимальный конец 34 головки 32 установлен с возможностью вращения на втором дистальном конце 24 установочного рычага 20, благодаря чему головка 32 может вращаться относительно установочного рычага 20 вокруг продольной оси 16; и
излучатель/датчик 40, установленный в неподвижном положении в головке 32, причем излучатель/датчик 40 содержит оптический центр;
причем оптический центр излучателя/датчика 40 расположен на продольной оси 16;
причем поле 42 обзора излучателя/датчика 40 находится в плоскости, также содержащей продольную ось узла 16 сканера; причем поле 42 обзора содержит дистальную границу 44, проходящую от дистального конца 36 головки 32, и содержит проксимальную границу 46, расположенную напротив дистальной границы 44;
и причем поле 42 обзора излучателя/датчика 40 описывается в продольном направлении тупым углом, содержащим, во всех положениях вращения головки 32 вокруг продольной оси 16 узла сканера, удлинение продольной оси 16 от дистального конца 14 узла 10 сканера и содержащим линию 48, проходящую от излучателя/датчика 40 в плоскости, перпендикулярной продольной оси 16,
отличающийся тем, что измерение износа состоит из одного сканирования.
2. Узел 10 сканера по п. 1, отличающийся тем, что поворотное соединение дистального конца 24 установочного рычага 20 с проксимальным концом 34 головки 32 обеспечивает возможность вращения на 360 градусов вокруг продольной оси 16 узла 10 сканера.
3. Узел 10 сканера по п. 1, отличающийся тем, что теплозащитный экран 26 расположен над по меньшей мере частью окружности дистального конца 24 установочного рычага 20.
4. Узел 10 сканера по п. 1, отличающийся тем, что содержит только один излучатель/датчик 40.
5. Узел 10 сканера по п. 1, отличающийся тем, что не взаимодействует с устройством для нанесения огнеупорных материалов.
6. Узел 10 сканера по п. 1, отличающийся тем, что вращение головки 32 около установочного рычага 20 ограничено вокруг любой оси, отличной от продольной оси 16 узла 10 сканера.
7. Узел 10 сканера по п. 1, отличающийся тем, что наряду с дистальным концом 14 узла 10 сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью 16 узла сканера, совпадающей с осью Z полярной системы координат, при вращении головки 32 через все значения фи в полярной системе координат от 0 градусов включительно и до 360 градусов включительно, узел сканера имеет поле обзора, включающее полностью все значения фи, все значения тета в полярной системе координат от 0 градусов включительно до 91 градуса включительно.
8. Узел 10 сканера по п. 1, отличающийся тем, что наряду с дистальным концом 14 узла 10 сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью 16 узла сканера, совпадающей с осью Z полярной системы координат, при вращении головки 32 через все значения фи в полярной системе координат от 0 градусов включительно и до 360 градусов включительно, узел сканера имеет поле обзора, которое является симметричным относительно оси Z и выходит за пределы полусферы.
9. Манипулятор 80 сканера, содержащий узел сканера по п. 1, при этом манипулятор 80 сканера дополнительно содержит рычаг 82 манипулятора, имеющий дистальный конец и проксимальный конец, причем продольная ось 84 рычага манипулятора лежит на одной прямой с продольной осью 16 узла сканера и проходит от дистального конца к проксимальному концу; причем дистальный конец манипулятора 80 сканера неподвижно прикреплен к проксимальному концу узла 10 сканера; и причем рычаг 82 манипулятора проходит в продольном направлении от узла 10 сканера.
10. Сканирующая система 100 для измерения износа в огнеупорной футеровке, содержащая:
манипулятор 80 сканера по п. 9;
опорный рычаг 112, имеющий проксимальный конец и дистальный конец;
опорное основание 110;
устройство 140 управления системой;
по меньшей мере один датчик 130 положения сосуда, связанный с возможностью передачи данных с устройством 140 управления;
привод 134 манипулятора, связанный с манипулятором 80, причем устройство 140 управления связано с возможностью передачи команд с приводом 134 манипулятора, и причем привод 134 манипулятора связан с возможностью передачи данных с устройством 140 управления;
привод 116 опорного рычага, связанный с опорным рычагом 112, причем устройство 140 управления связано с возможностью управления с приводом 116 опорного рычага; и процессор 170, связанный с возможностью передачи данных с по меньшей мере одним датчиком 130 положения, приводом 134 манипулятора, приводом 116 опорного рычага и излучателем/датчиком 40; причем дистальный конец опорного рычага 112 соединен с проксимальным концом манипулятора 80 сканера; и
причем проксимальный конец опорного рычага 112 соединен с опорным основанием 110.
11. Сканирующая система 100 по п. 10, отличающаяся тем, что проксимальный конец манипулятора 80 сканера шарнирно соединен с дистальным концом опорного рычага 112.
12. Сканирующая система 100 по п. 10, отличающаяся тем, что проксимальный конец опорного рычага 112 подвижно соединен с опорным основанием 110.
13. Сканирующая система 100 по п. 10, отличающаяся тем, что дистальный конец опорного рычага 112 неподвижно соединен с проксимальным концом манипулятора 80 сканера.
14. Способ измерения износа в огнеупорной футеровке, включающий:
a) опорожнение сосуда 2, содержащего футеровку;
b) установку сосуда 2 в требуемое положение;
c) ориентирование сосуда 2 таким образом, чтобы представляющая интерес поверхность футеровки внутри сосуда могла находиться в поле обзора узла сканера;
d) обеспечение наличия узла 10 сканера, содержащего установочный рычаг 20; головку 32, прикрепленную к установочному рычагу 20 с возможностью вращения, и излучатель/датчик 40, расположенный внутри головки 32;
причем узел 10 сканера имеет, наряду с дистальным концом узла сканера, расположенным таким образом, чтобы соответствовать положительному направлению оси Z полярной системы координат, и наряду с продольной осью узла сканера, совпадающей с осью Z полярной системы координат, при вращении головки через все значения фи в полярной системе координат от 0 градусов включительно и до 360 градусов включительно, поле обзора, которое является симметричным относительно оси Z и выходит за пределы полусферы;
e) установку узла 10 сканера в положение измерения;
f) приведение в действие излучателя/датчика 40;
g) вращение головки 32 через все значения фи в полярной системе координат;
h) получение для выбранных значений фи данных для выбранных значений тета в полярной системе координат;
i) сбор данных, предоставленных излучателем/датчиком 40 за одно сканирование; и
j) генерирование из собранных за одно сканирование данных профиля внутренней поверхности сосуда.
| СПОСОБ ДЛЯ КОНТРОЛЯ ИЗНОСА ОГНЕУПОРНОЙ ФУТЕРОВКИ МЕТАЛЛУРГИЧЕСКОГО ПЛАВИЛЬНОГО СОСУДА | 2006 |
|
RU2445573C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОПОГРАФИИ СЛОЕВ ФУТЕРОВКИ МЕТАЛЛУРГИЧЕСКОГО АГРЕГАТА | 2007 |
|
RU2326320C1 |
| Стекловаренная ванная печь с воздушным охлаждением стен бассейна и горелок | 1950 |
|
SU91253A1 |
| Балансирный руль | 1930 |
|
SU27851A1 |
| US 8072613 B2, 06.12.2011 | |||
| WO 2005050129 A2, 02.06.2005. | |||
