Изобретение относится к области радиолокации и может быть использовано для распознавания в бортовой радиолокационной станции (БРЛС) направления самонаведения пущенной в переднюю полусферу по группе самолетов ракеты с радиолокационной головкой самонаведения (РГС).
Известен способ функционирования импульсно-доплеровской БРЛС, заключающийся в формировании и излучении в пространство зондирующих импульсов, приеме, усилении, преобразовании на промежуточные частоты сигналов, отраженных от воздушной цели, каковой может являться пущенная в переднюю полусферу противником ракета с РГС, селекции сигналов по дальности и доплеровской частоте, их преобразовании в цифровую форму, измерении и оценке дальности до цели, скорости сближения с нею и угловых координат с их производными [1].
Недостатком данного способа является невозможность с его помощью распознать в БРЛС направления самонаведения пущенной ракеты с РГС в переднюю полусферу по группе самолетов.
Известен способ распознавания направления самонаведения пущенной по одиночному самолету ракеты с РГС, заключающийся в измерении и оценке в БРЛС угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной  и горизонтальной
и горизонтальной  плоскостях при самонаведении ракеты в переднюю полусферу в соответствии с методом пропорционального наведения, сравнении полученных оценок
плоскостях при самонаведении ракеты в переднюю полусферу в соответствии с методом пропорционального наведения, сравнении полученных оценок  и
и  с их пороговым значением ωпор, при выполнении условия
с их пороговым значением ωпор, при выполнении условия  или
или  принимается решение о самонаведении ракеты на самолет, т.е. «на меня» в соответствующей плоскости, в противном случае - решение о не самонаведении пущенной ракеты в соответствующей плоскости, т.е. «не на меня» [2].
принимается решение о самонаведении ракеты на самолет, т.е. «на меня» в соответствующей плоскости, в противном случае - решение о не самонаведении пущенной ракеты в соответствующей плоскости, т.е. «не на меня» [2].
Недостатком данного способа является невозможность с его помощью распознать по принципу «на меня - не на меня» в БРЛС каждого самолета из состава их группы направления самонаведения пущенной ракеты в переднюю полусферу по группе самолетов, разрешаемых по угловым координатам в радиолокационной головке самонаведения ракеты.
Это обусловлено тем, что при пуске противником ракеты в переднюю полусферу в направлении группы самолетов и ее самонаведении в соответствии с методом пропорционально наведения она может быть обнаружена, измерены и оценены угловые скорости вращения линий визирования «ракета-самолет» в соответствующих плоскостях в БРЛС каждого i-го самолета (где  ; N - количество самолетов в группе) из состава их группы. При этом из-за влияния таких факторов, как различные положения самолетов в пространстве, различные их скорости, влияние турбулентности и т.д., условия
; N - количество самолетов в группе) из состава их группы. При этом из-за влияния таких факторов, как различные положения самолетов в пространстве, различные их скорости, влияние турбулентности и т.д., условия  и
и  могут быть либо выполнены, либо ошибочно не выполнены сразу в нескольких БРЛС самолетов группы. В этом случае определить однозначно, на какой же именно самолет из состава их группы осуществляется самонаведение пущенной ракеты не представляется возможным.
могут быть либо выполнены, либо ошибочно не выполнены сразу в нескольких БРЛС самолетов группы. В этом случае определить однозначно, на какой же именно самолет из состава их группы осуществляется самонаведение пущенной ракеты не представляется возможным.
Цель изобретения - распознать по принципу «на меня - не на меня» в бортовой радиолокационной станции каждого самолета группы направления самонаведения в соответствии с методом пропорционального наведения пущенной ракеты в переднюю полусферу по группе самолетов, разрешаемых по угловым координатам в ее радиолокационной головке самонаведения.
Указанная цель достигается тем, что в способе распознавания направления самонаведения пущенной по группе самолетов ракеты с РГС, заключающемся в измерении и оценке в БРЛС одиночного самолета угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной  и горизонтальной
и горизонтальной  плоскостях при самонаведении ракеты в переднюю полусферу в соответствии с методом пропорционального наведения, параллельно измеряют и оценивают в БРЛС не на одном, а на каждом i-м самолете из состава их группы (; N - количество самолетов в группе с БРЛС с идентичными точностными характеристиками измерения и оценивания угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной и горизонтальной плоскостях) угловые скорости вращения линии визирования «ракета - i-й самолет группы» в вертикальной
плоскостях при самонаведении ракеты в переднюю полусферу в соответствии с методом пропорционального наведения, параллельно измеряют и оценивают в БРЛС не на одном, а на каждом i-м самолете из состава их группы (; N - количество самолетов в группе с БРЛС с идентичными точностными характеристиками измерения и оценивания угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной и горизонтальной плоскостях) угловые скорости вращения линии визирования «ракета - i-й самолет группы» в вертикальной  и горизонтальной
и горизонтальной  плоскостях, которые по «i-j»-м каналам связи (i,
плоскостях, которые по «i-j»-м каналам связи (i,  , j≠i) передают в БРЛС j-х самолетов группы (, j≠i), в БРЛС каждого i-го самолета группы сравнивают оцененные значения угловых скоростей вращения линий визирования
, j≠i) передают в БРЛС j-х самолетов группы (, j≠i), в БРЛС каждого i-го самолета группы сравнивают оцененные значения угловых скоростей вращения линий визирования  и
и  с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования
с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования  и
и  (j, , j≠i), если в БРЛС на i-м самолете группы выполняется хотя бы одно из условий
(j, , j≠i), если в БРЛС на i-м самолете группы выполняется хотя бы одно из условий  или
или  относительно j-х (j, , j≠i) самолетов группы, то принимают решение о самонаведении пущенной ракеты на данный i-й самолет из состава их группы соответственно в вертикальной или горизонтальной плоскости, т.е. «на меня», если ни одно из условий
относительно j-х (j, , j≠i) самолетов группы, то принимают решение о самонаведении пущенной ракеты на данный i-й самолет из состава их группы соответственно в вертикальной или горизонтальной плоскости, т.е. «на меня», если ни одно из условий  и
и  относительно j-х, (j, , j≠i) самолетов группы не выполняется, то принимают решение о том, что самонаведение пущенной ракеты не осуществляется, как в вертикальной, так и в горизонтальной плоскости на данный i-й самолет из состава их группы, т.е. «не на меня».
относительно j-х, (j, , j≠i) самолетов группы не выполняется, то принимают решение о том, что самонаведение пущенной ракеты не осуществляется, как в вертикальной, так и в горизонтальной плоскости на данный i-й самолет из состава их группы, т.е. «не на меня».
Новыми признаками, обладающими существенными отличиями, являются.
1. Параллельное измерение и оценивание с идентичными точностными характеристиками в БРЛС на каждом i-м самолете из состава их группы (; N - количество самолетов в группе с БРЛС с идентичными точностными характеристиками измерения и оценивания угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной и горизонтальной плоскостях) угловые скорости вращения линии визирования «ракета - i-й самолет группы» в вертикальной  и горизонтальной
и горизонтальной  плоскостях, которые по «i-j»-м каналам связи (i,
плоскостях, которые по «i-j»-м каналам связи (i,  , j≠i) передаются в БРЛС j-х самолетов группы (, j≠i).
, j≠i) передаются в БРЛС j-х самолетов группы (, j≠i).
2. Сравнение в БРЛС каждого i-го самолета () группы оцененных значений угловых скоростей вращения линий визирования  и с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования
и с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования  и
и  (, j≠i) и принятие в БРЛС на каждом i-м самолете решения о самонаведении пущенной противником ракеты «на меня» в случае, если выполняется хотя бы одно из условий
(, j≠i) и принятие в БРЛС на каждом i-м самолете решения о самонаведении пущенной противником ракеты «на меня» в случае, если выполняется хотя бы одно из условий  или
или  относительно j-х, (
относительно j-х, ( , j≠i) самолетов группы, в случае не выполнения хотя бы одного из данных условий - принятие решения о самонаведении ракеты «не на меня».
, j≠i) самолетов группы, в случае не выполнения хотя бы одного из данных условий - принятие решения о самонаведении ракеты «не на меня».
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков позволит распознать по принципу «на меня - не на меня» в БРЛС каждого самолета группы направления самонаведения ракеты в соответствии с методом пропорционального наведения и пущенной в переднюю полусферу по группе самолетов, разрешаемых по угловым координатам в ее РГС.
На рисунке 1 представлена кинематическая схема взаимного перемещения в горизонтальной плоскости (аналогично и в вертикальной плоскости) ракеты, пущенной в направлении группы самолетов в переднюю полусферу, на рисунке 2 - блок-схема, поясняющие предлагаемый способ.
Способ распознавания направления самонаведения пущенной по группе самолетов ракеты с РГС реализуется следующим образом. При самонаведении со скоростью Vp (рисунок 1) пущенной ракеты в направлении разрешаемых по угловым координатам в ее радиолокационной головке самонаведения N самолетов, летящих в составе группы со скоростями Vi (где ), относительно каждого i-го самолета группы будут иметь место соответствующие угловые скорости
), относительно каждого i-го самолета группы будут иметь место соответствующие угловые скорости  () вращения линии визирования «ракета - i-й самолет группы» (аналогично в вертикальной плоскости -
() вращения линии визирования «ракета - i-й самолет группы» (аналогично в вертикальной плоскости -  ) и точки встречи ТВi ракеты с i-м самолетом группы. Эта информация об угловых скоростях линий визирования в вертикальной и горизонтальной
) и точки встречи ТВi ракеты с i-м самолетом группы. Эта информация об угловых скоростях линий визирования в вертикальной и горизонтальной  плоскостях будет содержаться в отраженном от ракеты радиолокационном сигнале, который (рисунок 2) одновременно поступает на входы приемников БРЛС всех N самолетов группы, в каждом из которых он усиливается, преобразуется на промежуточные частоты, преобразуется в цифровую форму (блоки усиления и преобразования на рисунке 2 не показаны) и на промежуточной частоте с выхода усилителя промежуточной частоты (УПЧ) поступает на измеритель 1 угловой скорости вращения линии визирования «ракета - i-й самолет группы». Параллельно измеренные (с идентичными точностными характеристиками измерения) значения угловых скоростей вращения линий визирования
плоскостях будет содержаться в отраженном от ракеты радиолокационном сигнале, который (рисунок 2) одновременно поступает на входы приемников БРЛС всех N самолетов группы, в каждом из которых он усиливается, преобразуется на промежуточные частоты, преобразуется в цифровую форму (блоки усиления и преобразования на рисунке 2 не показаны) и на промежуточной частоте с выхода усилителя промежуточной частоты (УПЧ) поступает на измеритель 1 угловой скорости вращения линии визирования «ракета - i-й самолет группы». Параллельно измеренные (с идентичными точностными характеристиками измерения) значения угловых скоростей вращения линий визирования  и
и  (на рисунке 2 обозначены, как
(на рисунке 2 обозначены, как  ) поступают на входы соответствующих фильтров 2 сопровождения, на выходах которых в каждой БРЛС формируются оценки угловых скоростей
) поступают на входы соответствующих фильтров 2 сопровождения, на выходах которых в каждой БРЛС формируются оценки угловых скоростей  и
и  (с идентичными точностными характеристиками оценивания, на рисунке 2 -
(с идентичными точностными характеристиками оценивания, на рисунке 2 -  ) вращения линий визирования, которые, во-первых, по «i-j»-м каналам 3 связи (i,
) вращения линий визирования, которые, во-первых, по «i-j»-м каналам 3 связи (i,  , i≠j) передаются в БРЛС остальных j-х самолетов группы) (, j≠i) и, во-вторых, поступают на первые входы блоков 4 сравнения, на вторые входы, которых поступают оцененные значения угловых скоростей вращения линий визирования
, i≠j) передаются в БРЛС остальных j-х самолетов группы) (, j≠i) и, во-вторых, поступают на первые входы блоков 4 сравнения, на вторые входы, которых поступают оцененные значения угловых скоростей вращения линий визирования  и
и  (, Так, согласно рисунку 2, на второй вход блока 4 сравнения поступают следующие оценки угловых скоростей вращения линий визирования:
(, Так, согласно рисунку 2, на второй вход блока 4 сравнения поступают следующие оценки угловых скоростей вращения линий визирования:
в БРЛС 1-го самолета  ;
;
в БРЛС i-го самолета  ;
;
в БРЛС j-го самолета  ;
;
в БРЛС N-го самолета  .
.
Результаты сравнения угловых скоростей поступают на входы решающих блоков 5 соответствующих БРЛС, в каждом из которых принимается решение о самонаведении пущенной противником ракеты «на меня» в случае, если выполняется хотя бы одно из условий  или
или  относительно j-х (, j≠i) самолетов группы, в случае не выполнения хотя бы одного из данных условий принимается решение о самонаведении ракеты «не на меня».
относительно j-х (, j≠i) самолетов группы, в случае не выполнения хотя бы одного из данных условий принимается решение о самонаведении ракеты «не на меня».
Таким образом, применение предлагаемого изобретения позволит распознать по принципу «на меня - не на меня» в БРЛС каждого самолета группы направления самонаведения в соответствии с методом пропорционального наведения пущенной ракеты в переднюю полусферу по группе самолетов, разрешаемых по угловым координатам в ее радиолокационной головке самонаведения.
Источники информации
1. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, страницы 639-641 (аналог).
2. Пат. 2408031 Российская Федерация, МПК G01S 13/52 (2006.01). Способ сопровождения пилотируемой воздушной цели / Богданов А.В., Андронов А.В., Голубенко В.А., Киселев В.В., Кучин А.А., Синицын А.В., Филонов А.А., Черваков В.О. - №2009103242/09, заявл. 02.02.2009; опубл. 10.08.2010, бюл. №36 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ всеракурсного самонаведения ракеты "воздух-воздух" на заданный тип самолёта из состава их разнотипной пары | 2023 |
|
RU2805782C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары | 2021 |
|
RU2758682C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары при воздействии уводящих по скорости помех | 2022 |
|
RU2783734C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на самолёт из состава их пары по его функциональному назначению по принципу "ведущий-ведомый" | 2019 |
|
RU2695762C1 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСТРЕБИТЕЛЕМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ ЕГО БЛИЖНЕМ НАВЕДЕНИИ НА ГРУППОВУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2015 |
|
RU2593911C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта | 2019 |
|
RU2726273C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ НАВЕДЕНИЯ САМОЛЕТОВ НА НАЗЕМНЫЕ ЦЕЛИ | 2002 |
|
RU2210801C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ | 2006 |
|
RU2335730C2 |
Изобретение относится к области радиолокации и может быть использовано для распознавания в бортовой радиолокационной станции (БРЛС) направления самонаведения пущенной в переднюю полусферу по группе самолетов ракеты с радиолокационной головкой самонаведения (РГС). Достигаемый технический результат – повышение точности распознавания. Способ заключается в измерении и оценке в БРЛС на каждом i-м самолете из состава их группы ( ; N - количество самолетов в группе) угловых скоростей вращения линий визирования «ракета - i-й самолет группы» в вертикальной
; N - количество самолетов в группе) угловых скоростей вращения линий визирования «ракета - i-й самолет группы» в вертикальной  и горизонтальной
и горизонтальной  плоскостях, которые по «i-j»-м каналам связи (i,
плоскостях, которые по «i-j»-м каналам связи (i,  , j≠i) передаются в БРЛС j-х самолетов группы (, j≠i), в БРЛС каждого i-го самолета группы сравниваются оцененные значения угловых скоростей вращения линий визирования
, j≠i) передаются в БРЛС j-х самолетов группы (, j≠i), в БРЛС каждого i-го самолета группы сравниваются оцененные значения угловых скоростей вращения линий визирования  и
и  с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования
с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования  и
и  (, j≠i), если в БРЛС на i-м самолете группы выполняется хотя бы одно из условий
(, j≠i), если в БРЛС на i-м самолете группы выполняется хотя бы одно из условий  или
или  относительно j-х (, j≠i) самолетов группы, то принимают решение о самонаведении пущенной ракеты на данный i-й самолет из состава их группы соответственно в вертикальной или горизонтальной плоскости, т.е. «на меня», если ни одно из условий
относительно j-х (, j≠i) самолетов группы, то принимают решение о самонаведении пущенной ракеты на данный i-й самолет из состава их группы соответственно в вертикальной или горизонтальной плоскости, т.е. «на меня», если ни одно из условий  и
и  относительно j-х (, j≠i) самолетов группы не выполняется, то принимают решение о том, что самонаведение пущенной ракеты не осуществляется, как в вертикальной, так и в горизонтальной плоскости на данный i-й самолет из состава их группы, т.е. «не на меня». 2 ил.
относительно j-х (, j≠i) самолетов группы не выполняется, то принимают решение о том, что самонаведение пущенной ракеты не осуществляется, как в вертикальной, так и в горизонтальной плоскости на данный i-й самолет из состава их группы, т.е. «не на меня». 2 ил.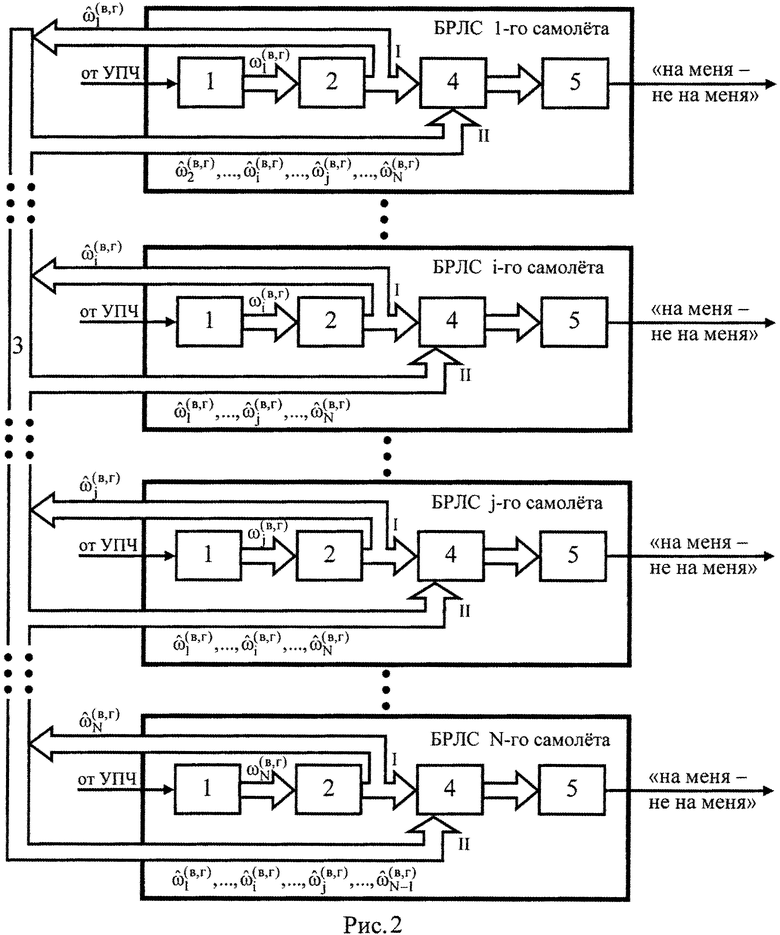
Способ распознавания направления самонаведения пущенной по группе самолетов ракеты с радиолокационной головкой самонаведения, заключающийся в измерении и оценке в бортовой радиолокационной станции одиночного самолета угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной  и горизонтальной
и горизонтальной  плоскостях при самонаведении ракеты в переднюю полусферу в соответствии с методом пропорционального наведения, отличающийся тем, что параллельно измеряют и оценивают в бортовой радиолокационной станции не на одном, а на каждом i-м, где
плоскостях при самонаведении ракеты в переднюю полусферу в соответствии с методом пропорционального наведения, отличающийся тем, что параллельно измеряют и оценивают в бортовой радиолокационной станции не на одном, а на каждом i-м, где  ; N - количество самолетов в группе с бортовыми радиолокационными станциями с идентичными точностными характеристиками измерения и оценивания угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной и горизонтальной плоскостях, самолете из состава их группы угловые скорости вращения линии визирования «ракета - i-й самолет группы» в вертикальной
; N - количество самолетов в группе с бортовыми радиолокационными станциями с идентичными точностными характеристиками измерения и оценивания угловых скоростей вращения линий визирования «ракета - самолет» в вертикальной и горизонтальной плоскостях, самолете из состава их группы угловые скорости вращения линии визирования «ракета - i-й самолет группы» в вертикальной  и горизонтальной
и горизонтальной  плоскостях, которые по «i-j»-м каналам связи, где
плоскостях, которые по «i-j»-м каналам связи, где  , j≠i, передают в бортовые радиолокационные станции j-х самолетов группы,
, j≠i, передают в бортовые радиолокационные станции j-х самолетов группы,
где  , j≠i,
, j≠i,
в бортовой радиолокационной станции каждого i-го самолета группы сравнивают оцененные значения угловых скоростей вращения линий визирования  и
и  с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования
с переданными по каналам связи оцененными значениями угловых скоростей вращения линий визирования  и
и  , где
, где  , j≠i, если в бортовой радиолокационной станции на i-м самолете группы выполняется хотя бы одно из условий
, j≠i, если в бортовой радиолокационной станции на i-м самолете группы выполняется хотя бы одно из условий  или
или  относительно j-х, где
относительно j-х, где  , j≠i, самолетов группы, то принимают решение о самонаведении пущенной ракеты на данный i-й самолет из состава их группы соответственно в вертикальной или горизонтальной плоскости, т.е. «на меня», если ни одно из условий
, j≠i, самолетов группы, то принимают решение о самонаведении пущенной ракеты на данный i-й самолет из состава их группы соответственно в вертикальной или горизонтальной плоскости, т.е. «на меня», если ни одно из условий  и
и  относительно j-х, где
относительно j-х, где  , j≠i, самолетов группы не выполняется, то принимают решение о том, что самонаведение пущенной ракеты не осуществляется, как в вертикальной, так и в горизонтальной плоскости на данный i-й самолет из состава их группы, т.е. «не на меня».
, j≠i, самолетов группы не выполняется, то принимают решение о том, что самонаведение пущенной ракеты не осуществляется, как в вертикальной, так и в горизонтальной плоскости на данный i-й самолет из состава их группы, т.е. «не на меня».
| СПОСОБ СОПРОВОЖДЕНИЯ ПИЛОТИРУЕМОЙ ВОЗДУШНОЙ ЦЕЛИ | 2009 |
|
RU2408031C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| Прибор для определения газопроницаемости пористых материалов | 1930 |
|
SU22326A1 |
| US 7961133 B2, 14.06.2011 | |||
| ПРОТЕЗ КЛАПАНА СЕРДЦА | 1999 |
|
RU2159598C1 |
| JP 2007315951 A, 06.12.2007. | |||

