Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известен способ определения истинного курса с помощью гироскопического датчика угловой скорости ( см. , например, книгу Б. И. Назарова и Г. А. Хлебникова "Гиростабилизаторы ракет" М.,1975, стр 193-196), согласно которому курсовое направление, горизонтально расположенной измерительной оси гироскопа определяют аналитически путем вычислений по результам измерений горизонтальной составляющей угловой скорости вращения Земли.
С целью повышения точности определения курса применяют методы, направленные на уменьшение влияния дрейфа гироскопа при измерении проекции горизонтальной составляющей угловой скорости Земли на измерительную ось прибора. Так, гироскопический датчик угловой скорости, измерительная ось которого расположена в плоскости горизонта, устанавливают на разные азимутальные углы и снимают на этих углах показания с гироскопа в виде электрического напряжения с эталонного сопротивления, стоящего в цепи обратной связи. С учетом того, что ряд моментов, не связанных с корпусом прибора, меняют знак при азимутальных поворотах, разработаны известные методы, которые позволяют выполнить взаимную компенсацию вредных моментов. Однако эти известные методы автокомпенсации не позволяют полностью исключить погрешность определения курса от вредных моментов. Это связано с тем, что компенсируемые моменты в разных азимутальных положениях изменяют свою величину. Так же не разработаны методы автокомпенсации моментов от разбаланса вдоль оси собственного вращения, квадратурных моментов, моментов от неравножесткости при наклонном положении плоскости осей чувствительности гироскопа.
За прототип взят способ определения истинного курса с помощью гироскопического датчика угловой скорости, основанный на его аналитическом вычислении (см. статью V.L. Budkin, S.P. Redkin "Gyrocompassing on a Movable Object by Means of Angular Rate Sensor on the Basis of Dynamically Tuned Gyro". 5th Saint Petersbury International Conference on Integrated Navigational Systems, May 25-27,1998).
В этом способе проводят гирокомпасирование с применением датчика угловой скорости на основе динамически настраиваемого гироскопа (ДУС-ДНГ) при бесплатформенной установке его на объекте. Предварительно привязывают измерительные оси гироскопа к осям, связанным с объектом, согласовывают знаки изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определяют коэффициенты модели дрейфа гироскопа, широту местоположения объекта, углы наклона плоскости измерительных осей гироскопа по тангажу и крену, измеряют напряжения с эталонных сопротивлений гироскопа, работающего в режиме датчика угловой скорости, а затем азимутальный угол объекта определяют с помощью выражения:
где U11, U12 - напряжения с эталонных сопротивлений гироскопа соответственно по первому и второму каналам,
Кн11, Кн12 - крутизна гироскопа по напряжению по первому и второму каналам,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
υ, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
ω
В известном способе производится аналитическая компенсация дрейфа гироскопа. Для этого дрейф гироскопа может быть представлен в виде математической модели. Стационарную модель дрейфа в условиях неподвижного объекта, учитывающую дрейф, не зависящий от ускорения, дрейф от разбаланса вдоль оси собственного вращения и квадратурный дрейф, можно представить в виде:
ω
ω
где ω
ω
ω
gx, gу - проекции ускорения силы тяжести g на оси, связанные с гироскопом,
gx = gsinγcosυ, gу = -gsinυ.
Для точной аналитической компенсации дрейфа необходимо точное знание коэффициентов модели дрейфа, которые определяются предварительно в результате калибровочных испытаний гироскопа. Однако при калибровочных испытаниях эти коэффициенты определяются с погрешностями, они также изменяются в процессе наработки гироскопа и выполнить их повторные калибровочные испытания без снятия с гироскопического устройства не представляется возможным. Ошибки в задании коэффициентов модели дрейфа обуславливают погрешности гирокомпасирования.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности гирокомпасирования с применением гироскопического датчика угловой скорости.
Технический результат достигается тем, что в известном способе гирокомпасирования с применением гироскопического датчика угловой скорости, включающем предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, использование гироскопа в режиме обратной связи по току датчика момента, определение сигналов с эталонных сопротивлений датчика угловой скорости, согласование знаков изменения сигналов с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определение коэффициентов модели дрейфа гироскопа, а в рабочем режиме нахождение широты местоположения объекта, углов наклона плоскости измерительных осей гироскопа по тангажу и крену, алгоритмическую компенсацию дрейфа гироскопа, аналитическое определение нескорректированного угла К истинного курса объекта, дополнительно предварительно устанавливают гироскоп в положение, при котором угол истинного курса равен 0 o, плоскость измерительных осей гироскопа горизонтальна, измерительные оси Хг1,Уг1 гироскопа направлены соответственно на восток и север, выполняют аналитическое гирокомпасирование и находят погрешность гирокомпасирования Δψ01, потом устанавливают гироскоп в положение, при котором угол истинного курса равен 270 o, горизонтально расположенные измерительные оси Хг1 и Уг1 направлены соответственно на север и запад, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψ02, затем гироскоп устанавливают в положение, в котором угол истинного курса равен 0o, измерительная ось Хг1 находится в горизонте и направлена на восток, а измерительная ось Уг1 наклонена по тангажу на угол υ1, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψυ1, после этого гироскоп устанавливают в положение, в котором измерительная ось Хг1 находится в горизонте и направлена на север, а измерительная ось Уг1 наклонена по тангажу на угол υ1, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψυ2, затем гироскоп устанавливают в положение, в котором угол истинного курса равен 0o, измерительная ось Уг1 находится в горизонте и направлена на север, а измерительная ось Хг1 наклонена по крену на угол γ1, выполняют гирокомпасирование и находят погрешность гирокомпасирования Δψγ1, после этого гироскоп устанавливают в положение, в котором угол истинного курса равен 270o, измерительная ось Уг1 находится в горизонте и направлена на запад, а измерительная ось Xг1 наклонена по крену на угол γ1, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψγ2, а затем в рабочем режиме определяют алгоритмическую компенсацию погрешности гирокомпасирования в виде следующего аналитического выражения:
где
Δω
Δω
Δω
Δω
Δω
Δω
Δω
Δω
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
υ, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
g - ускорение силы тяжести.
Найдем аналитическое выражение для погрешности гирокомпасирования с применением датчика угловой скорости на основе динамически настраиваемого гироскопа. Для известного способа аналитическое гирокомпасирование выполняется с использованием выражения (1).
Представим выражение (1) в виде:
tg(ψ) = AB-1, (3)
где
B = (U11Kн11cosγ+ω
Положим, что ΔA и ΔB есть отклонения от точных значений А и В. Эти отклонения обусловят погрешность гирокомпасирования Δψ и выражение (3) будет иметь вид:
tg(ψ+Δψ) = (A+ΔA)(B+ΔB)-1. (4)
В соответствии с тригонометрической формулой сложения
tg(ψ+Δψ) = (tgψ+tgΔψ)(1-tgψtgΔψ)-1. (5)
Из выражения (4) с учетом (5) погрешность гирокомпасирования можно представить в следующем виде:
где 
ΔU11, U12 - погрешность измерения напряжения с эталонных сопротивлений гироскопа соответственно по первому и второму каналам,
ΔKН11, ΔKН12 - погрешность задания крутизны гироскопа по напряжению по первому и второму каналам,
Δϕ - погрешность задания широты местоположения объекта,
Δυ, Δγ - погрешность задания углов наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
Δω
Δω
Δω
Для изодромной обратной связи гироскопа измеряемые с эталонных сопротивлений напряжения можно представить в следующем виде:
U11 = aα11cosψ+aα12sinψ+aα13,
U12 = aα21cosψ+aα22sinψ+aα23, (7)
где aα11 = Ωcosϕcosυ•K
aα12 = 0,
aα13 = (-ω
aα21 = -Ωcosϕsinγsinυ•K
aα22 = -Ωcosϕcosγ•K
aα23 = (ω
Подставляя (7) в (6) и полагая 
после преобразований получим:
Полученное выражение (8) характеризует погрешность гирокомпасирования с применением гироскопического датчика угла. Эта погрешность обусловлена остаточным дрейфом Δω
В первом приближении в качестве угла К можно использовать угол истинного курса, который определен известным методом, так как практически погрешность его определения можно считать малой.
Коэффициенты модели остаточного дрейфа на основе информации о погрешностях гирокомпасирования можно определить следующим образом.
Для синуса погрешности гирокомпасирования можно записать следующее выражение:
Используя выражение (10), определим коэффициенты модели остаточного дрейфа через погрешность гирокомпасирования Δψ. Для этого введем следующие системы координат: Хд Уд Zд, Хс Zс Ус, Хг1 Уг1 Zг1. Система координат Хд Уд Zд является географической. Ось Хд направлена на север, ось Уд - вертикально вверх, а ось Zд - на восток. В системе координат Хд Уд Zд проекциями угловой скорости Земли Ω являются горизонтальная составляющая Ωcosϕ, направленная на Север, и вертикальная составляющая Ωsinϕ, где ϕ- угол широты места. С объектом связана система координат Xc Ус Zc. Ось Xc направлена вдоль продольной оси объекта, ось Ус перпендикулярна оси Ус и располагается в плоскости симметрии объекта, ось Zc - перпендикулярна этой плоскости. Система координат Xг1Уг1 Zг1 связана с гироскопом. Ось Xг1 направлена по оси
чувствительности второго канала гироскопа, ось Уг1 - по оси чувствительности первого канала, а ось Zг1 - по оси собственного вращения. Вдоль оси Zг1 направлен вектор кинетического момента Н гироскопа. Пусть привязка осей гироскопа выполнена таким образом, что они совпадают с осями объекта.
Установим гироскоп в положение 1, как показано на фиг.1. В этом положении угол истинного курса равен 0o, плоскость измерительных осей гироскопа горизонтальна, измерительные оси Xг1, Уг1 гироскопа направлены соответственно на восток и север. Выполним аналитическое гирокомпасирование известным методом и найдем погрешность гирокомпасирования Δψ01. Подставив Δψ01 у (10), в этом положении будем иметь
Δω
Установим гироскоп в положение 2, как показано на фиг.1. В этом положении угол истинного курса равен 270o, горизонтально расположенные измерительные оси Xг1,Уг1 направлены соответственно на север и запад. Проведем гирокомпасирование известным методом и определим погрешность гирокомпасирования Δψ02. Подставив Δψ02 в (10), в этом положении получим
Δω
Установим гироскоп в положение 3, как показано на фиг.1. В этом положении угол истинного курса равен 0o, измерительная ось Xг1 находится в горизонте и направлена на восток, а измерительная ось Уг1 наклонена по тангажу на угол υ1. Выполним гирокомпасирование известным методом и определим погрешность гирокомпасирования Δψυ1. Подставив Δψυ1 в (10), в этом положении получим:
Δω
Установим гироскоп в положение 4, как показано на рис. 1. В этом положении угол истинного курса равен 270o, измерительная ось Xг1 находится в горизонте и направлена на север, а измерительная ось Уг1 наклонена по тангажу на угол υ1. Проведем гирокомпасирование известным методом и найдем погрешность гирокомпасирования Δψυ2. Подставив Δψυ2 в (10), в этом положении будем иметь:
Δω
Установим гироскоп в положение 5, как показано на фиг.1. В этом положении угол истинного курса равен 0o, измерительная ось Уг1 находится в горизонте и направлена на север, а измерительная ось Xг1 наклонена по крену на угол γ1. Выполним гирокомпасирование известным методом и найдем погрешность гирокомпасирования Δψγ1. Подставив Δψγ1 в (10), в этом положении будем иметь:
Δω
Установим гироскоп в положение 6, как показано на фиг. 1. В этом положении угол истинного курса равен 270o, измерительная ось Yг1 находится в горизонте и направлена на запад, а измерительная ось Xг1 наклонена по крену на угол γ1. Проведем гирокомпасирование известным методом и найдем погрешность гирокомпасирования Δψγ2. Подставив Δψγ2 в (10), в этом положении будем иметь:
Δω
Таким образом, предлагаемый способ алгоритмической компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости имеет следующие отличия от известного способа:
- в предварительной операции находят коэффициенты модели остаточного дрейфа, обусловленного несовершенством модели дрейфа, используемого в известном способе;
- в операции гирокомпасирования вводится новое действие связанное с алгоритмической компенсацией непосредственно погрешности гирокомпасирования с использованием новой аналитической зависимости;
- коэффициенты модели остаточного дрейфа находятся новым способом на основе полученных связей между коэффициентами остаточного дрейфа и соответствующих им погрешностям гирокомпасирования.
На фиг. 1 показаны системы координат: географическая, связанная с объектом гироскопом.
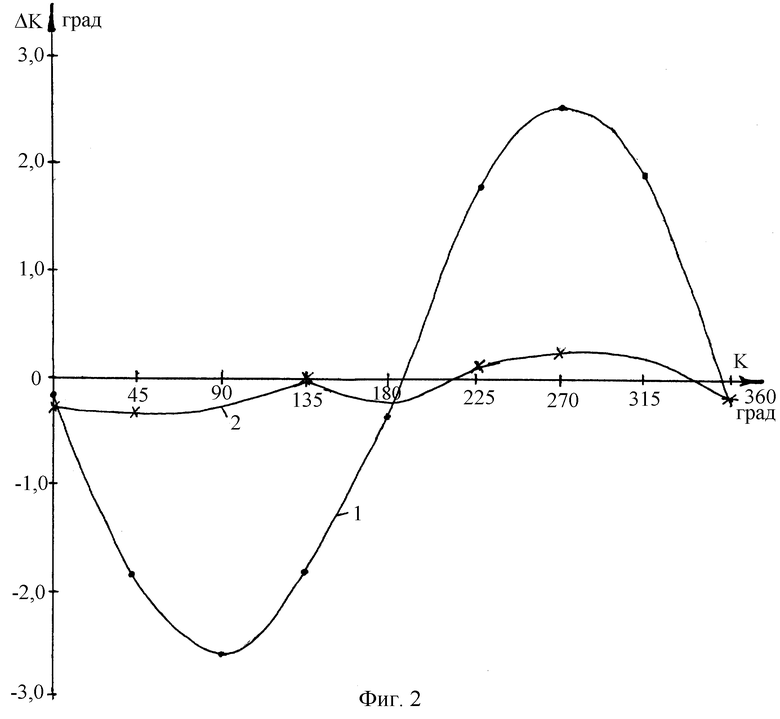
На фиг. 2 показаны экспериментальные зависимости погрешностей гирокомпасирования на разных азимутальных углах при использовании известного и предлагаемого способов.
Проводилась экспериментальная сравнительная оценка погрешностей гирокомпасирования с применением известного и предлагаемого способов.
Экспериментальные исследования проводились с помощью датчика угловой скорости на основе динамически настраиваемого гироскопа ГВК-6 392116. Предварительно в калибровочных испытаниях определялись коэффициенты модели дрейфа гироскопа. Для испытываемого гироскопа коэффициенты модели дрейфа имели следующие значения:
ω
ω
ω
ω
ω
ω
После этих калибровочных испытаний и наработки 500 ч гироскоп был установлен на платформу наклонно-поворотного стенда. Для проведения испытаний по точности гирокомпасирования с использованием ранее полученных коэффициентов и модели дрейфа плоскость измерительных осей гироскопа наклонялась на угол тангажа υ=10o и угол крена γ=10o. Известным способом выполнялось аналитическое гирокомпасирование на разных углах истинного курса и находилась погрешность гирокомпасирования. Погрешность гирокомпасирования, полученная при использовании известного способа, представлена зависимостью 1 на фиг.2.
После этого с помощью предлагаемого способа определялись коэффициенты остаточного дрейфа. При испытаниях делались наклоны по тангажу и крену на углы υ1= 10o, γ1=10o. В результате были получены следующие коэффициенты остаточного дрейфа:
Δω
Δω
Δω
Δω
Δω
Δω
На разных углах истинного курса при наклоне гироскопа по крену и тангажу на углы υ = γ =10o выполнялось гирокомпасирование с применением предлагаемой алгоритмической компенсации погрешности гирокомпасирования и скорректированное значение истинного курса определялось с помощью выражения
Kк = K-Δψ, (17)
где К - значение истинного курса, определенное известным методом;
Δψ - предлагаемая алгоритмическая компенсация погрешности гирокомпасирования, определяемая выражением (9).
Найденная погрешность гирокомпасирования с применением предлагаемой алгоритмической компенсации представлена зависимостью 2 на фиг.2.
На фиг.2 показаны экспериментальные зависимости погрешностей гирокомпасирования на разных азимутальных углах при использовании известного и предлагаемого способов. Из зависимостей, представленных на фиг.2, видно, что применение предлагаемого способа позволяет повысить точность гирокомпасирования. Так, погрешность гирокомпасирования с применением известного способа в диапазоне курсовых углов от 0 до 360o не превысила 2,6o, а при использовании предлагаемого способа погрешность в этих условиях не превысила 0,3 o. Применение предлагаемого способа позволило уменьшить погрешность гирокомпасирования в 8,7 раза.
Использование предлагаемого способа алгоритмической компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости обеспечивает по сравнению с существующим способом повышение точности гирокомпасирования. Повышение точности гирокомпасирования расширяет область применения аналитических гирокомпасных устройств, например появляется возможность применения их в геодезии, строительстве, авиации при начальной выставке по курсу бесплатформенных курсовертикалей и инерциальных систем.
Изобретение относится к области точного приборостроения и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа. Предварительно привязывают измерительные оси гироскопа к осям, связанным с объектом. Используют гироскоп в режиме обратной связи по току датчика момента. Определяют сигналы с эталонных сопротивлений датчика угловой скорости. Определяют коэффициенты модели дрейфа гироскопа. Находят погрешности гирокомпасирования в шести пространственных положениях гироскопа, когда курсовой угол равен 0 и 270 o, плоскость осей чувствительности горизонтальна, наклонена только по тангажу, наклонена только по крену. В рабочем режиме находят широту местоположения объекта, углы наклона плоскости измерительных осей гироскопа по тангажу и крену. Проводят алгоритмическую компенсацию дрейфа гироскопа. Определяют алгоритмическую компенсацию погрешности в виде аналитического выражения, использующего значения нескорректированного угла истинного курса, погрешностей гирокомпасирования в шести положениях и углов наклона при их предварительном определении, широты местоположения, углов наклона объекта при гирокомпасировании. Обеспечивается повышение точности гирокомпасирования. 2 ил.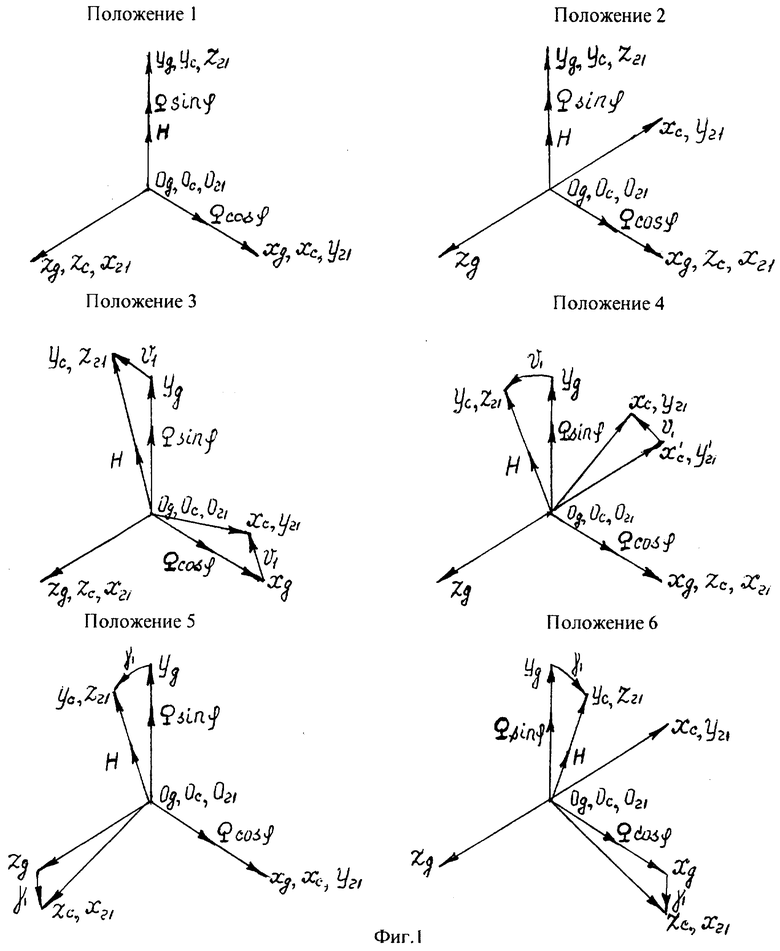
Способ алгоритмической компенсации погрешности гирокомпасирования с применением гироскопического датчика угловой скорости, включающий предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, использование гироскопа в режиме обратной связи по току датчика момента, определение сигналов с эталонных сопротивлений датчика угловой скорости, согласование знаков изменения сигналов с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определение коэффициентов модели дрейфа гироскопа, а в рабочем режиме нахождение широты местоположения объекта, углов наклона плоскости измерительных осей гироскопа по тангажу и крену, алгоритмическую компенсацию дрейфа гироскопа, аналитическое определение нескорректированного угла К истинного курса объекта, отличающийся тем, что предварительно устанавливают гироскоп в положение, при котором угол истинного курса равен 0o, плоскость измерительных осей гироскопа горизонтальна, измерительные оси Хг1, Уг1 гироскопа направлены соответственно на восток и север, выполняют аналитическое гирокомпасирование и находят погрешность гирокомпасирования Δψ01, потом устанавливают гироскоп в положение, при котором угол истинного курса равен 270o, горизонтально расположенные измерительные оси Хг1 и Уг1 направлены соответственно на север и запад, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψ02, затем гироскоп устанавливают в положение, в котором угол истинного курса равен 0o, измерительная ось Хг1 находится в горизонте и направлена на восток, а измерительная ось Уг1 наклонена по тангажу на угол υ1, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψυ1, после этого гироскоп устанавливают в положение, в котором угол истинного курса равен 270o, измерительная ось Хг1 находится в горизонте и направлена на север, а измерительная ось Уг1 наклонена по тангажу на угол υ1, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψυ2, затем гироскоп устанавливают в положение, в котором угол истинного курса равен 0o, измерительная ось Уг1 находится в горизонте и направлена на север, а измерительная ось Хг1 наклонена по крену на угол γ1, выполняют гирокомпасирование и находят погрешность гирокомпасирования Δψγ1, после этого гироскоп устанавливают в положение, в котором угол истинного курса равен 270o, измерительная ось Уг1 находится в горизонте и направлена на запад, а измерительная ось Хг1 второго канала наклонена по крену на угол γ1, проводят гирокомпасирование и находят погрешность гирокомпасирования Δψγ2, а затем в рабочем режиме определяют алгоритмическую компенсацию погрешности гирокомпасирования в виде следующего аналитического выражения
где Δω
Δω
Δω
Δω
Δω
Δω
Δω
Δω
Ω - угловая скорость вращения Земли;
ϕ - широта местоположения объекта;
υ, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену;
g - ускорение силы тяжести.
| V.L | |||
| BUDKIN, S.P.REDKIN | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| RU 2073206 C1, 10.02.1997 | |||
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |

