Изобретение относится к области точного приборостроения, преимущественно гироскопического и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известен способ определения истинного курса с помощью гироскопического датчика угловой скорости (см., например, книгу Б.И. Назарова и Г.А. Хлебникова "Гиростабилизаторы ракет". М., 1975, стр. 193-196), согласно которому курсовое направление измерительной оси гироскопа определяют аналитически по результатам измерений проекций горизонтальной составляющей угловой скорости Земли.
С целью повышения точности определения курса применяют методы, направленные на уменьшение влияния дрейфа гироскопа. Так гироскопический датчик угловой скорости, измерительная ось которого расположена в плоскости горизонта, поворачивают на разные азимутальные углы и снимают на этих углах выходную информацию с гироскопа в виде электрического напряжения с эталонного сопротивления, стоящего в цепи обратной связи.
На основе того, что ряд моментов гироскопа, не связанных с его корпусом, меняет знак при разворотах его в азимуте, разработаны известные методы, которые позволяют выполнить взаимную компенсацию вредных моментов. Однако эти известные методы автокомпенсации не позволяют полностью исключить погрешность определения курса от вредных моментов гироскопа, а также от других источников, например, невыставки осей чувствительности в горизонт.
За прототип взят способ определения истинного курса с помощью гироскопического датчика угловой скорости, основанный на его аналитическом вычислении (см. статью V.L. Budkin, S.P. Redkin "Gyrocompassing on a Movable Object by Means of Angular Rate Sensor on the Basis of Dynamically Tuned Gyro". Second International Symposium on Inertial Technology in Beijing. Beijing, China, October, 1988, pp. 143-151).
В этом способе проводят гирокомпасирование с применением датчика угловой скорости на основе динамически настраиваемого гироскопа (ДУС-ДНГ) при бесплатформенной установке его на объекте. Предварительно привязывают измерительные оси гироскопа к осям, связанным с объектом, согласовывают знаки изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определяют коэффициенты модели дрейфа гироскопа, широту местоположения объекта, углы наклона плоскости измерительных осей гироскопа по тангажу и крену, измеряют напряжения с эталонных сопротивлений гироскопа, работающего в режиме датчика угловой скорости. После этого азимутальный угол неподвижного наклонного объекта определяют с помощью выражения
где U11, U12 - напряжения с эталонных сопротивлений гироскопа соответственно по первому и второму каналам,
Кн11, Кн12 - крутизна гироскопа по напряжению по первому и второму каналам,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
υ,γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
ω
Однако в известном способе определение истинного курса производится с погрешностью, которая обусловлена ошибками задания и измерения: крутизны гироскопа по напряжению, широты местоположения, углов тангажа и крена, модели дрейфа гироскопа, напряжений с эталонных сопротивлений гироскопа.
Выражение для погрешности гирокомпасирования на неподвижном наклонном объекте с применением датчика угловой скорости на основе динамически настраиваемого гироскопа можно представить в виде

Kн11,ΔKн11,Kн12,ΔKн12 - крутизна гироскопа по напряжению и погрешность ее задания по первому и второму каналу,
ω
Ω - угловая скорость вращения Земли,
ϕ,Δϕ - широта местоположения и погрешность ее задания,
υ,Δυ - угол наклона объекта по тангажу и погрешность его задания,
γ,Δγ - угол наклона объекта по крену и погрешность его задания,
ΔU11,ΔU12 - погрешность измерения напряжений на эталонных сопротивлениях гироскопа.
В соответствии с выражением (2) была рассчитана погрешность определения курса в известном способе при параметрах, приведенных в табл.1.
На фиг. 1 показана теоретическая зависимость погрешности определения истинного курса известным способом, полученная при этих параметрах.
Таким образом, из зависимости 1, представленной на фиг.1 следует, что в известном способе определения истинного курса имеет место существенная погрешность, обусловленная параметрами гироскопа и ошибками их задания, углами наклона плоскости измерительной оси гироскопа и ошибками их задания, угловой скоростью Земли, широтой местоположения и ошибкой ее задания, погрешностью измерения напряжений с эталонных сопротивлений гироскопа. При этом погрешность определения курса имеет колебательный характер в зависимости от курсового угла.
Расчетная амплитуда изменения систематической погрешности гирокомпасирования в известном способе составила 0,5 град.
Целью настоящего изобретения является повышение точности определения истинного курса с применением гироскопического датчика угловой скорости.
Поставленная цель достигается тем, что в известном способе определения истинного курса наклонного объекта, включающем предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, согласование знаков изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определение коэффициентов модели дрейфа гироскопа, широты местоположения объекта, углов наклона плоскости измерительных осей гироскопа по тангажу и крену при операции гирокомпасирования в исходном положении гироскопа измеряют напряжения с эталонных сопротивлений его двух каналов, после этого поворачивают гироскоп вокруг оси собственного вращения в наклонной плоскости измерительных осей гироскопа против часовой стрелки на равноотстоящие друг от друга по углу положения в пределах 360 градусов, угловое расстояние между которыми выбирают таким, чтобы для него угол 90 градусов являлся кратным, при этом в каждом угловом положении измеряют угол поворота относительно исходного положения и напряжения с эталонных сопротивлений двух каналов гироскопа, а затем вычисляют значение угла истинного курса по следующей формуле
где ψi = 2π-arctgai, если bli>0, b2i>0;
ψi = π-arctgai, если bli>0, b2i<0;
ψi = π-arctgai, если bli>0, b2i<0; если bli>0, b2i>0;
если bli>0, b2i>0;
ai = blib2i -1,
ω коэффициенты модели дрейфа, пропорциональные ускорению во второй степени,
коэффициенты модели дрейфа, пропорциональные ускорению во второй степени,
U11i, U12i - напряжения с эталонных сопротивлений гироскопа соответственно по первому и второму каналу,
Кн11, Kн12 - крутизна гироскопа по напряжению по первому и второму каналу,
υ,γ - углы наклона объекта по тангажу и крену,
δi - угол поворота корпуса гироскопа вокруг оси собственного вращения относительно исходного положения,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
n - число угловых положений гироскопа при повороте вокруг оси собственного вращения в пределах 360 градусов,
i - текущий индекс, характеризующий угловое положение гироскопа при поворотах вокруг оси собственного вращения.
Погрешность гирокомпасирования в предлагаемом способе можно определить с помощью следующего выражения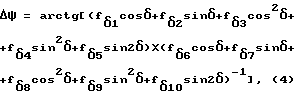

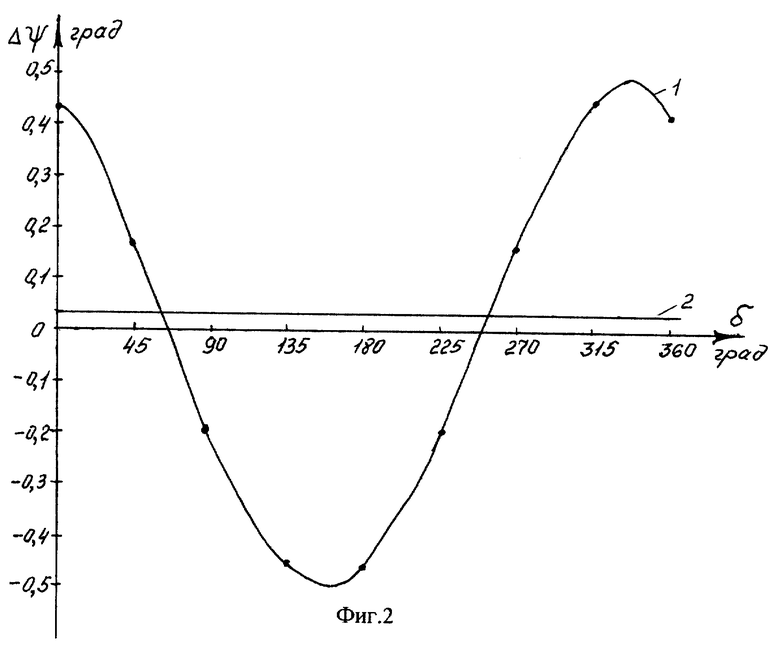
В соответствии с выражением (4) была рассчитана погрешность определения истинного курса на каждом угле δi поворота корпуса гироскопа вокруг оси собственного вращения и среднее значение погрешности для этих углов при параметрах, приведенных в табл.2.
На фиг. 2 показана теоретическая зависимость погрешности определения истинного курса на разных углах δi поворота корпуса гироскопа вокруг оси собственного вращения и расчетная зависимость 2, характеризующая среднее значение погрешности для этих углов.
Из зависимости 1, представленной на фиг.2, следует, что погрешность гирокомпасирования при вращении корпуса гироскопа вокруг оси собственного вращения имеет знакопеременный, колебательный характер с периодом 360 градусов. При этом зависимость 1 квазисимметрична относительно оси δ. В связи с этим ее среднее значение, представленное зависимостью 2, имеет величину значительно меньшую, чем погрешность гирокомпасирования в исходном состоянии при δ= 0, которая характеризует известный способ. На фиг.1 показано среднее значение погрешности в виде зависимости 2, полученной на разных азимутальных углах. Среднее значение погрешности имеет зависимость от азимутального угла колебательного характера. Однако при этом амплитуда колебаний средней погрешности на порядок меньше амплитуды колебаний погрешности, полученной в известном методе.
Таким образом, предлагаемый способ определения истинного курса наклонного объекта с применением гироскопического датчика угловой скорости имеет следующие основные отличия от известного способа:
- в операции снятия показаний с гироскопа измеряют напряжения с эталонных сопротивлений гироскопа не только в исходном положении, но и в положениях после поворота на заданные углы корпуса гироскопа вокруг оси собственного вращения в плоскости измерительных осей прибора, которая характеризует наклонную плоскость объекта,
- расчет угла истинного курса объекта производится с использованием показаний гироскопа на задаваемых углах поворота корпуса прибора вокруг оси собственного вращения с применением предлагаемых новых аналитических соотношений.
На фиг. 1 показана теоретическая зависимость погрешности определения истинного курса известным и предлагаемым способами.
На фиг. 2 показаны теоретическая зависимость погрешности определения истинного курса на разных углах поворота корпуса гироскопа вокруг оси собственного вращения и среднее значение этой погрешности.
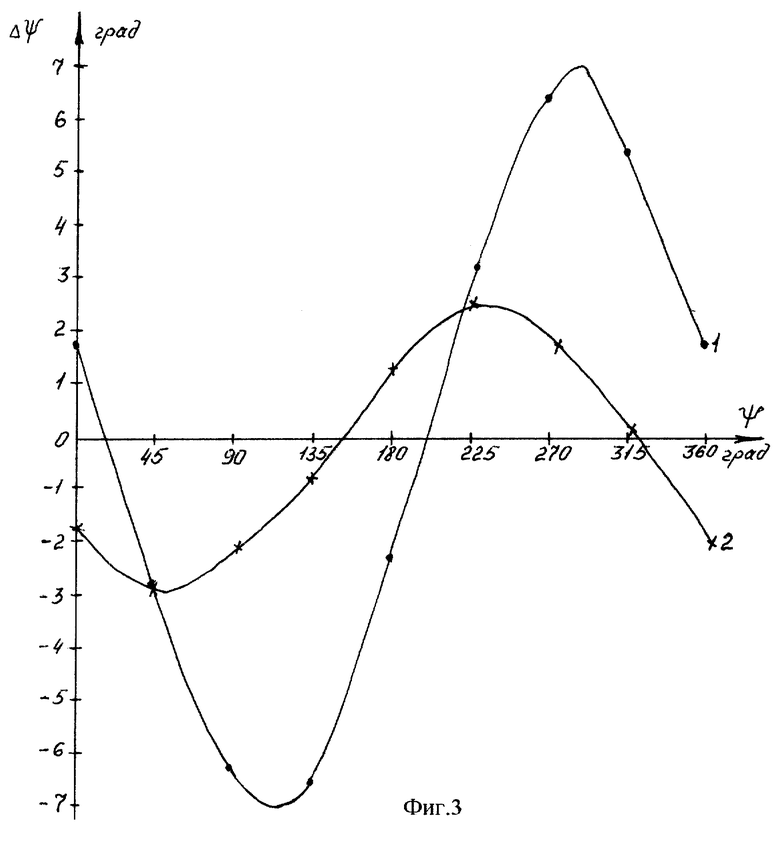
На фиг.3 показаны экспериментальные зависимости определения угла истинного курса известным и предлагаемым способами.
Проводилась экспериментальная сравнительная оценка точности определения курса с применением известного и предлагаемого способов. Экспериментальные исследования проводились с помощью датчика угловой скорости на базе динамически настраиваемого гироскопа ГВК-6. Динамически настраиваемый гироскоп устанавливался на платформу наклонно-поворотного стенда, с помощью которого осуществлялся наклон гироскопа по крену и тангажу и поворот его корпуса вокруг оси собственного вращения. Динамически настраиваемый гироскоп работал в режиме датчика угловой скорости. С эталонных сопротивлений, стоящих в цепи обратной связи гироскопа, снимались показания в виде напряжения. С помощью стенда гироскоп наклонялся на 30 градусов по крену и тангажу. Снимались показания с гироскопа в исходном положении при угле поворота вокруг оси собственного вращения δ=0. Затем гироскоп из исходного положения поворачивался против часовой стрелки вокруг оси собственного вращения на углы δ=45, 90, 135, 180, 225, 270, 315, 360 град. На каждом из этих углов снимались показания с гироскопа. Используя эти показания, определялись углы истинного курса с применением известного и предлагаемого способа.
Погрешность измерения определялась как разность измеренных и известных задаваемых курсовых углов.
На фиг. 3 показаны экспериментальные зависимости погрешностей гирокомпасирования от азимутального угла при известном способе 1 и предлагаемом способе 2.
Из сравнения этих зависимостей видно, что применение предлагаемого способа позволяет повысить точность определения истинного курса по сравнению с известным способом.
Так в известном способе и предлагаемом способе погрешность гирокомпасирования имеет колебательную зависимость от курсового угла. Однако амплитуда погрешности гирокомпасирования в предлагаемом способе в 2,3 раза меньше, чем в известном способе. Использование предлагаемого способа определения истинного курса с применением гироскопического датчика угловой скорости обеспечивает по сравнению с известным способом существенное повышение точности его нахождения в условиях наклонного основания, что обуславливает возможность расширения областей применения гирокомпасных устройств на базе датчика угловой скорости. Так на базе датчика угловой скорости с применением предлагаемого способа возможно создание двухрежимных приборов курса для наземных подвижных объектов, которые определяют курс при остановках объекта и сохраняют его при движении.
Способ относится к области точного приборостроения и может быть использован при создании гирокомпасов и курсоуказывающих устройств аналитического типа. Проводят предварительную привязку измерительных осей гироскопа к осям, связанным объектом, согласование знаков изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определение коэффициентов модели гироскопа, дрейфа широты местоположения объекта, углов наклона плоскости измерительных осей гироскопа по тангажу и крену. При гирокомпасировании в исходном положении гироскопа измеряют напряжения с эталонных сопротивлений его двух каналов. Поворачивают гироскоп вокруг оси собственного вращения в наклонной плоскости измерительных осей гироскопа против часовой стрелки на равноотстоящие друг от друга по углу положения в пределах 360o, угловое расстояние между которыми выбирают таким, чтобы для него угол 90o являлся кратным. В каждом угловом положении измеряют угол поворота относительно исходного положения и напряжения с эталонных сопротивлений двух каналов гироскопа. На основе полученных показаний аналитически определяют угол истинного курса объекта. Обеспечивается повышение точности определения истинного курса. 3 ил., 2 табл.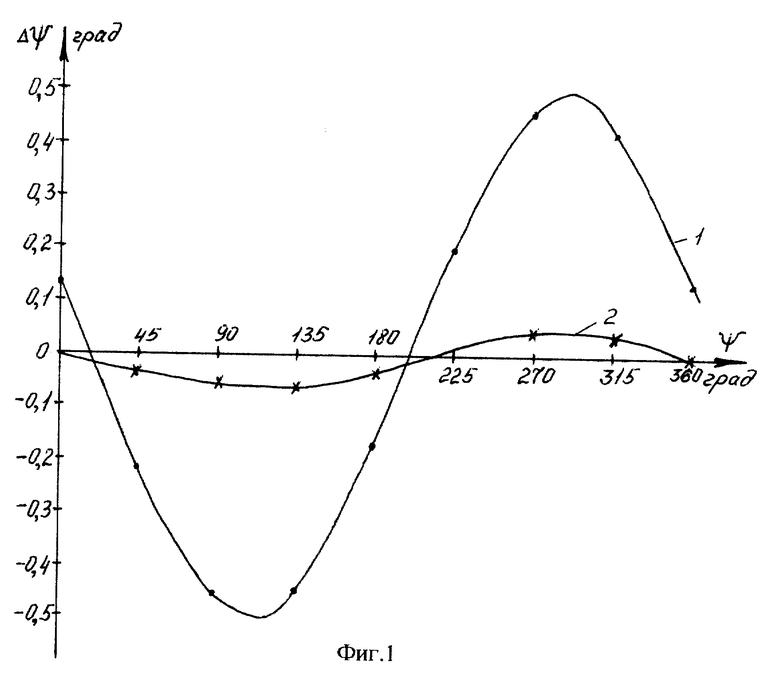
Способ определения истинного курса наклонного объекта с применением гироскопического датчика угловой скорости, включающий предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, согласование знаков изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определение коэффициентов модели дрейфа гироскопа, широты местоположения объекта, углов наклона плоскости измерительных осей гироскопа по тангажу и крену, отличающийся тем, что при гирокомпасировании в исходном положении гироскопа измеряют напряжения с эталонных сопротивлений его двух каналов, после этого поворачивают гироскоп вокруг оси собственного вращения в наклонной плоскости измерительных осей гироскопа против часовой стрелки на равноотстающие друг от друга по углу положения в пределах 360o, угловое расстояние между которыми выбирают таким, чтобы для него угол 90o являлся кратным, при этом в каждом угловом положении измеряют угол поворота относительно исходного положения и напряжения с эталонных сопротивлений двух каналов гироскопа, а затем вычисляют значение угла истинного курса по следующей формуле:
где ψi = 2π-arctg ai, если bli>0, b2i>0;
ψi = π-arctg ai, если bli>0, b2i<0;
ψi = π-arctg ai, если bli<0, b2i<0;
ψi = -arctg ai, если bli<0, b2i>0;
ai = bli b2i -1;
ω коэффициенты модели дрейфа, пропорциональные ускорению во второй степени;
коэффициенты модели дрейфа, пропорциональные ускорению во второй степени;
Ulli, Ul2i - напряжения с эталонных сопротивлений гироскопа соответственно по первому и второму каналу;
Кнll, Kн12 - крутизна гироскопа по напряжению по первому и второму каналу;
υ,γ - углы наклона объекта по тангажу и крену;
δi - угол поворота корпуса гироскопа вокруг оси собственного вращения относительно исходного положения;
Ω - угловая скорость вращения Земли;
ϕ - широта местоположения объекта;
n - число угловых положений гироскопа при повороте вокруг оси собственного вращения в пределах 360o;
i - текущий индекс, характеризующий угловое положение гироскопа при поворотах вокруг оси собственного вращения.
| V.L | |||
| Budkin, S.P | |||
| Redkin "Gyrocompassing on a Movable Object by Means of Angular Rate Sensor on the Basis of Dynamically Tuned Gyro" | |||
| Second International Symposium on Inertial Technology in Beijing | |||
| Beijing, China, October, 1988, pp 143-151 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| RU 2073206 C1, 10.02.1997 | |||
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |

