Область техники, к которой относится изобретение
Изобретение относится к ручке управления для управления воздушным судном.
Уровень техники
Воздушные суда традиционно оборудуют рычагами управления, позволяющими пилоту приводить в действие элероны и руль высоты для регулирования высоты воздушного судна путем поворота вокруг осей тангажа и крена. Рычаг управления расположен между ногами пилота, который использует для перемещения рычага силу своих рук.
В некоторых самолетах, оборудованных электрическими органами управления полетом, рычаг управления был заменен на средства управления, называемые «джойстиком» или ручкой управления. Такую ручку управления, более компактную, чем классический рычаг управления, обычно встраивают в подлокотник кресла пилота, причем она содержит рукоятку, которую пилот приводит в действие исключительно движением кисти руки. Установка такой ручки управления позволяет освободить пространство между пилотом и приборной доской для установки в нем другого оборудования.
Кроме того, ручка управления обычно содержит комплекс пружин, позволяющих создавать возвратное усилие по каждой из осей поворота рукоятки (оси крена и оси тангажа) и возвращать рукоятку в нейтральное положение, когда пилот не прикладывает к ней никакого усилия.
Однако существующие механические конструкции ручек управления, как правило, не обеспечивают возможности развязывания возвратных усилий между двумя осями поворота рукоятки. Иначе говоря, возвратное усилие по одной из осей рукоятки зависит от углового положения рукоятки относительно второй оси.
Кроме того, такие конструкции не обеспечивают возможности создания линейных силовых возвратных усилий (то есть таких, величина которых пропорциональна угловому положению рукоятки относительно данной оси поворота).
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, состоит в предложении ручки управления, обеспечивающей возможность развязывания возвратных усилий по двум осям.
Для решения поставленной задачи в соответствии с изобретением предлагается ручка управления для воздушного судна, содержащая каркас, рукоятку, установленную с возможностью поворота относительно каркаса, и механические средства соединения рукоятки с каркасом, причем механические средства соединения содержат:
- первый соединительный элемент, установленный с возможностью перемещения относительно каркаса вокруг первой оси поворота,
- второй соединительный элемент, установленный с возможностью перемещения относительно каркаса вокруг второй оси поворота, причем вторая ось поворота образует ненулевой угол с первой осью поворота,
- третий промежуточный элемент, установленный с возможностью поворота относительно первого соединительного элемента вокруг третьей оси поворота,
- четвертый промежуточный элемент, установленный с возможностью поворота относительно второго соединительного элемента вокруг четвертой оси поворота, причем четвертая ось поворота образует ненулевой угол с третьей осью поворота,
при этом соединительные элементы или промежуточные элементы установлены с возможностью поворота относительно друг друга вокруг пятой оси поворота, образующей ненулевой угол соответственно с первой осью поворота и второй осью поворота или с третьей осью поворота и четвертой осью поворота так, чтобы обеспечить возможность изменения соответственно угла между первой осью поворота и второй осью поворота или угла между третьей осью поворота и четвертой осью поворота.
Благодаря предлагаемой конструкции ручки управления возвратные усилия, прилагаемые к первому соединительному элементу и второму соединительному элементу, могут быть полностью независимыми.
Кроме того, наличие пятой оси поворота обеспечивает возможность рассогласования между первой осью поворота и четвертой осью поворота и/или между второй осью поворота и третьей осью поворота. Данная дополнительная степень свободы обеспечивает возможность одновременного поворота рукоятки вокруг первой оси поворота и второй оси поворота, несмотря на рассогласование, возникающее между осями неподвижной системы координат, определенной каркасом (первой и второй осями поворота), и осями повернутой системы координат, определенной соединительными элементами (третьей и четвертой осями).
Ручка управления по изобретению может обладать следующими дополнительными характеристиками:
- механические соединительные средства содержат соединительный орган, содержащий внешнее кольцо и внутреннее кольцо, установленные с возможностью поворота одно относительно другого вокруг пятой оси поворота, причем каждый из соединительных элементов или, соответственно, промежуточных элементов соединен с соответствующим кольцом соединительного органа, а рукоятка скреплена с третьим промежуточным элементом и/или с четвертым промежуточным элементом,
- одно из колец соединительного органа зафиксировано относительно первого соединительного элемента, а второе кольцо зафиксировано относительно второго соединительного элемента,
- одно из колец соединительного органа зафиксировано относительно каркаса так, чтобы обеспечить возможность поворота только первого соединительного элемента или только второго соединительного элемента относительно каркаса вокруг пятой оси поворота,
- соединительный орган содержит по меньшей мере один ролик, установленный с возможностью поворота вокруг оси поворота, зафиксированной относительно каркаса, причем ролик размещен между внутренним кольцом и внешним кольцом так, что поворот одного из колец относительно каркаса вызывает одновременный поворот другого кольца относительно каркаса в противоположном направлении,
- одно из колец соединительного органа зафиксировано относительно третьего промежуточного элемента, а другое кольцо зафиксировано относительно четвертого промежуточного элемента,
- одно из колец соединительного органа зафиксировано относительно рукоятки так, чтобы обеспечить возможность поворота рукоятки только относительно третьего промежуточного элемента или только относительно четвертого промежуточного элемента вокруг пятой оси поворота,
- соединительный орган содержит по меньшей мере один ролик, установленный с возможностью поворота вокруг оси поворота, зафиксированной относительно рукоятки, причем ролик размещен между внутренним кольцом и внешним кольцом так, что поворот одного из колец относительно рукоятки вызывает одновременный поворот второго кольца относительно рукоятки в противоположном направлении,
- механические средства соединения содержат соединительный орган, содержащий неподвижную часть и часть, установленную с возможностью перемещения относительно неподвижной части, при этом соединительный орган содержит по меньшей мере две гибкие пластины, и каждая из гибких пластин соединяет между собой части и является упругодеформируемой для обеспечения возможности поворота подвижной части относительно неподвижной части, причем гибкие пластины выполнены с возможностью создания возвратного момента, направленного на противодействие повороту частей относительно друг друга,
- третий промежуточный элемент или четвертый промежуточный элемент прикреплен к одной части соединительного органа, а рукоятка прикреплена к другой части соединительного органа,
- рукоятка соединена с каркасом шаровым соединением, обеспечивающим поворот рукоятки относительно каркаса вокруг трех осей поворота,
- рукоятка соединена с каркасом карданным соединением, обеспечивающим только поворот рукоятки относительно каркаса вокруг первой оси и поворот рукоятки относительно каркаса вокруг второй оси,
- рукоятка выполнена с возможностью прихода в состояние простого упора с третьим промежуточным элементом и с четвертым промежуточным элементом для осуществления поворота промежуточных элементов соответственно вокруг третьей и четвертой осей так, чтобы обеспечить возможность относительного поворота промежуточных элементов относительно рукоятки вокруг пятой оси поворота,
- один из промежуточных элементов содержит упор, выполненный так, чтобы обеспечить возможность контакта рукоятки с упором для приложения усилия к промежуточному элементу и поворота промежуточного элемента в одном направлении усилия,
- рукоятка выполнена с возможностью контакта с упором по прямой линии соприкосновения, параллельной пятой оси поворота,
- рукоятка выполнена с возможностью контакта с упором по цилиндрической поверхности соприкосновения, ось вращения которой параллельна пятой оси поворота,
- ручка управления содержит возвращающий орган, выполненный с возможностью приложения усилия к одному из промежуточных элементов соединительного органа для противодействия повороту промежуточного элемента,
- возвращающий орган содержит пружину растяжения, соединяющую первый соединительный элемент или второй соединительный элемент с промежуточным элементом, поворачиваемым под воздействием рукоятки,
- возвращающий орган содержит ленту, соединяющую пружину растяжения с промежуточным элементом, причем лента выполнена с возможностью наматывания на цилиндрический элемент и скреплена с промежуточным элементом.
Краткое описание чертежей
Другие особенности и преимущества настоящего изобретения станут ясны из нижеследующего описания, приведенного исключительно в иллюстративных целях и не накладывающего каких-либо ограничений, содержащего ссылки на прилагаемые чертежи.
На чертежах:
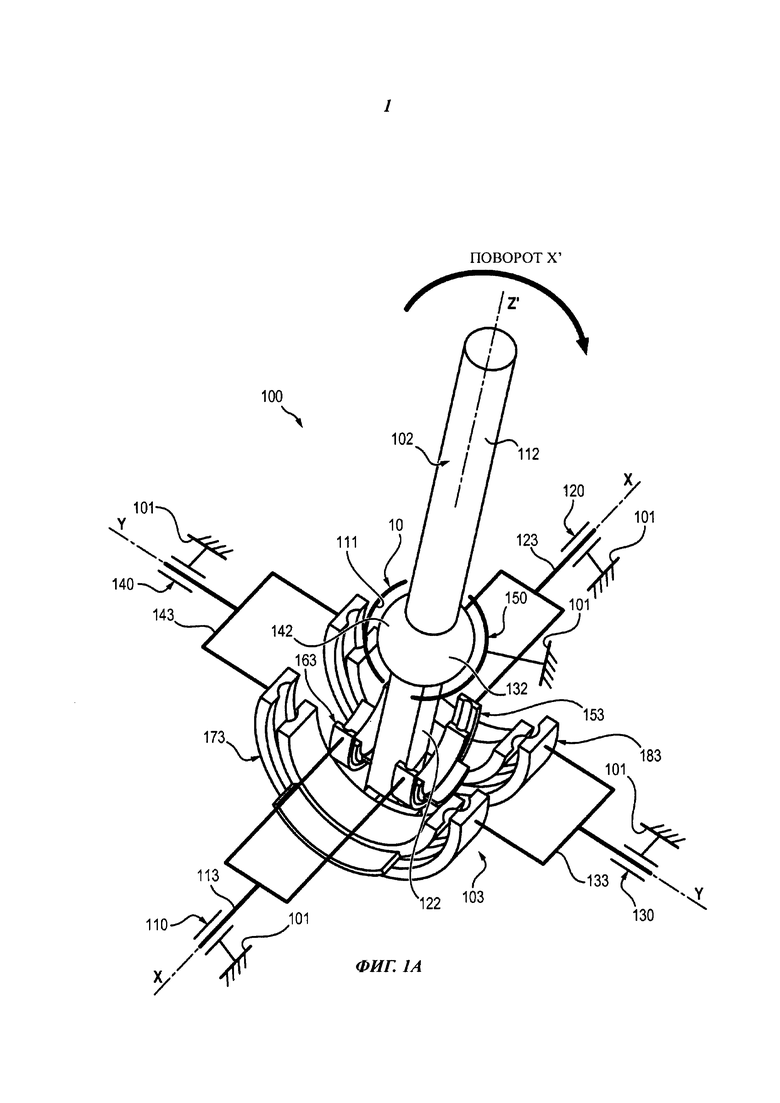
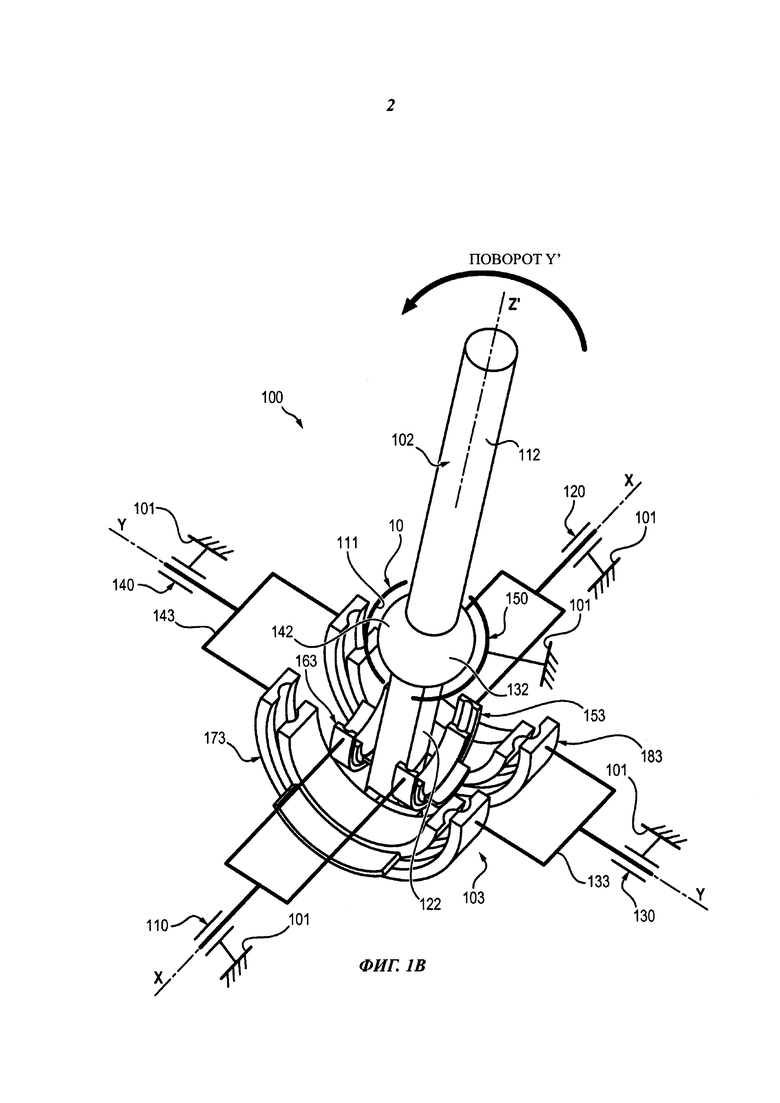
- на фиг. 1А и 1В схематически представлена ручка управления по первому варианту осуществления изобретения, снабженная направляющими,
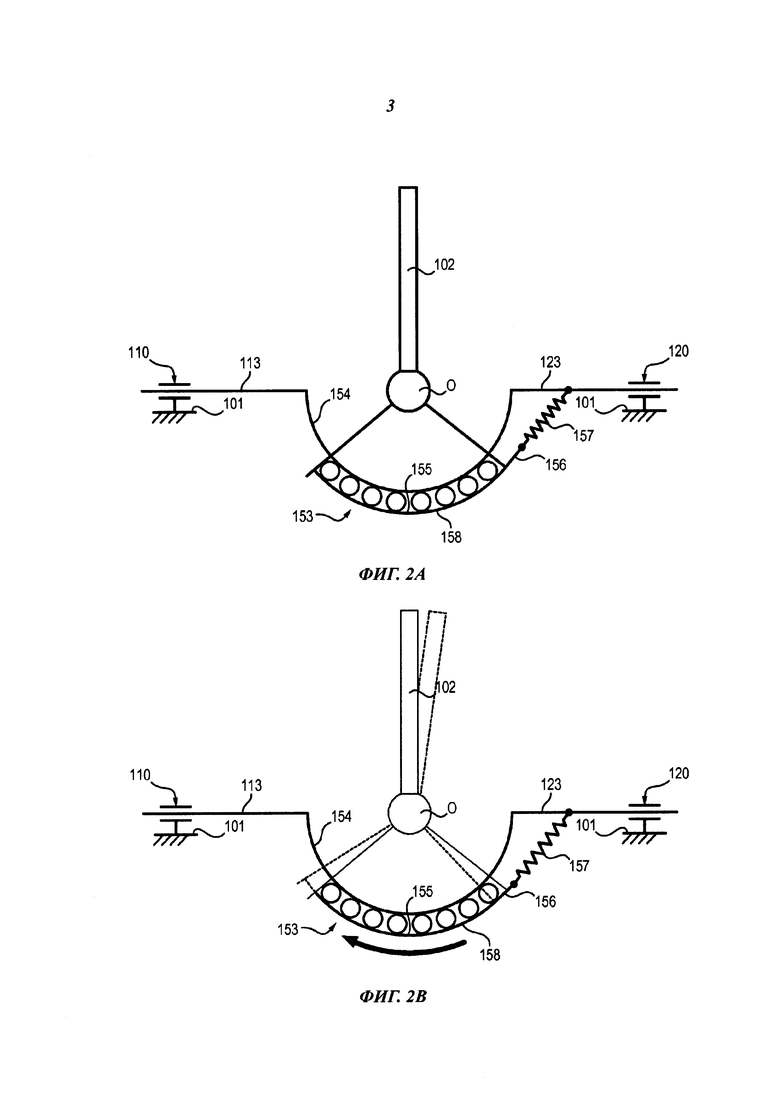
- фиг. 2А и 2В схематически иллюстрируют работу возвращающего органа на внешнем кольце направляющей ручки управления,
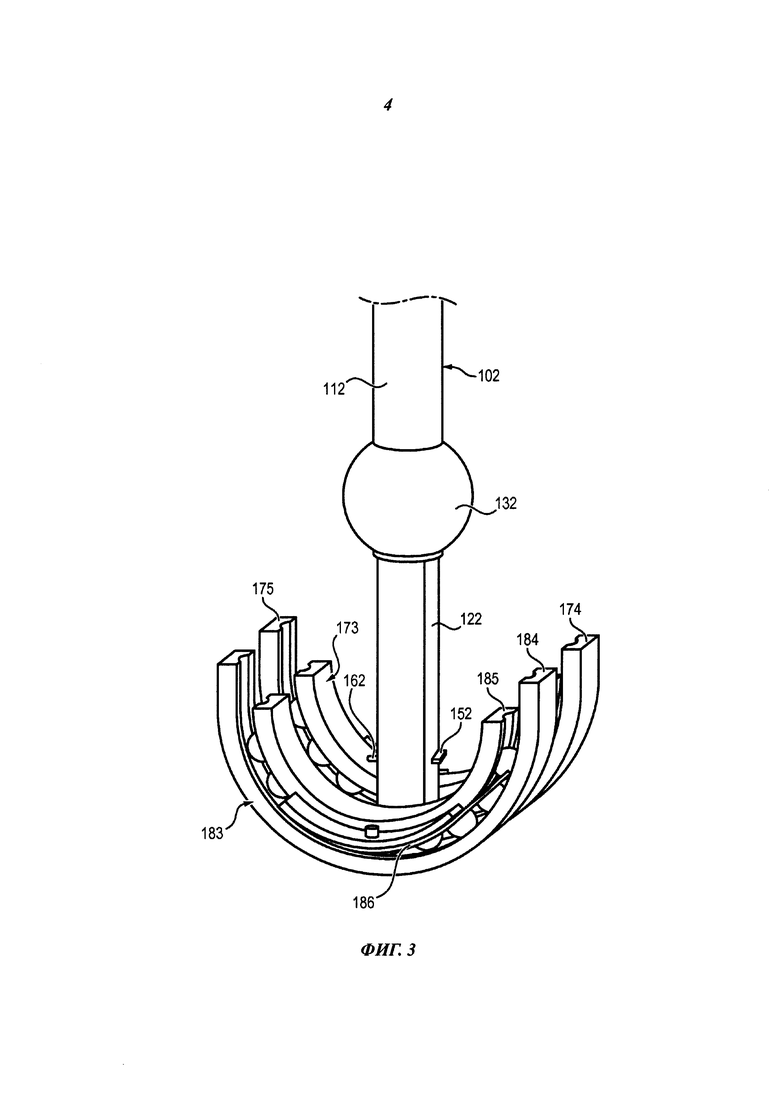
- на фиг. 3 схематически представлено устройство возвращающего органа на внутреннем кольце направляющей ручки управления,
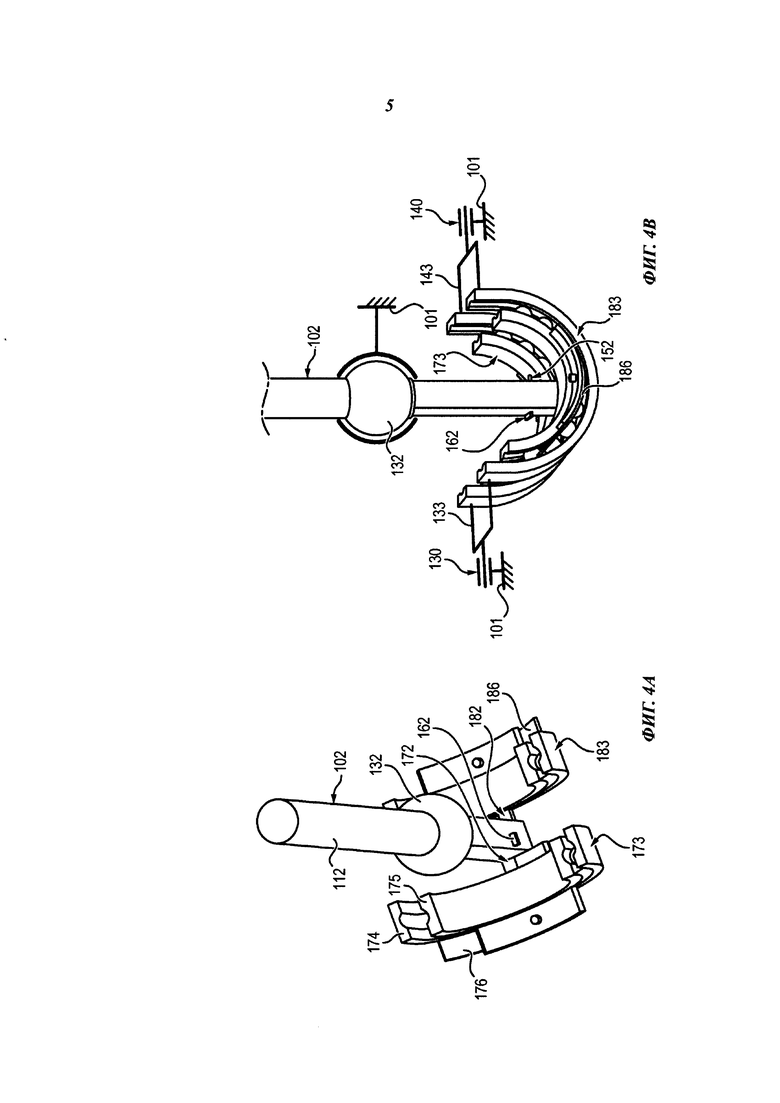
- на фиг. 4А и 4В схематически представлено устройство двух возвращающих органов на внутренних кольцах двух направляющих,
- на фиг. 5A-5D схематически представлен возвращающий орган с двойной жесткостью,
- на фиг. 6А-6С схематически представлен пример карданной системы, которая может быть использована для установки рукоятки на корпусе ручки управления,
- на фиг. 7А-7С схематически представлена ручка управления по второму варианту осуществления изобретения, снабженная подшипниками,
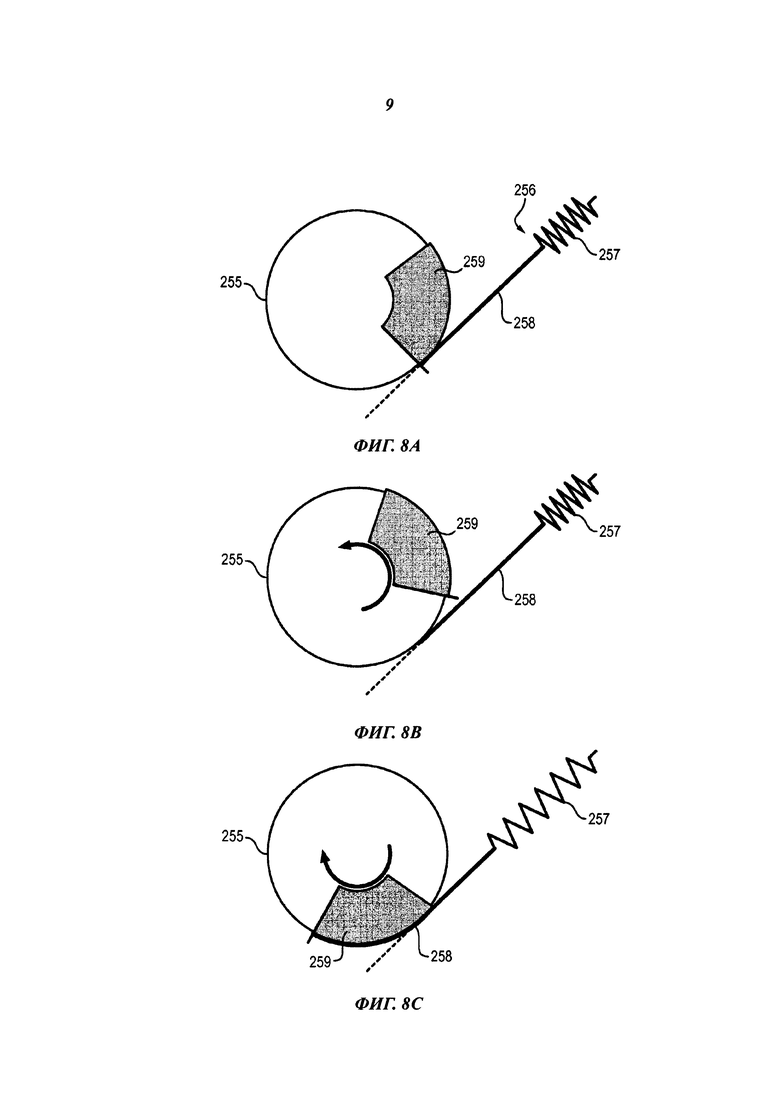
- фиг. 8А-8С схематически иллюстрируют крепление возвращающего органа к кольцу подшипника,
- на фиг. 9А и 9В схематически представлены два примера соединения между рукояткой и направляющими для создания ручки управления в варианте осуществления по фиг. 1А и 1В,
- на фиг. 10 схематически представлен первый вариант осуществления ручки управления по фиг. 7А-7С,
- на фиг. 11 схематически представлен второй вариант осуществления ручки управления по фиг. 7А-7С,
- на фиг. 12 схематически представлен третий вариант осуществления ручки управления по фиг. 7А-7С,
- на фиг. 13 схематически представлен четвертый вариант осуществления ручки управления по фиг. 7А-7С,
- на фиг. 14 схематически представлен пятый вариант осуществления ручки управления по фиг. 7А-7С,
- на фиг. 15 схематически представлен соединительный орган, который может быть использован в вариантах осуществления по фиг. 12, 13 и 14 вместо пятого подшипника.
Осуществление изобретения
На фиг. 1А и 1В схематически представлена ручка 100 управления по первому варианту осуществления изобретения.
Ручка 100 управления содержит каркас 101, который может быть предназначен для встраивания, например, в подлокотник сиденья, рукоятку 102, установленную с возможностью поворота относительно каркаса, и механические средства 103 соединения рукоятки с каркасом, обеспечивающие возможность создания силовой обратной связи на рукоятке при повороте вокруг двух осей поворота.
Рукоятка 102 имеет общую форму, вытянутую в продольном направлении (вдоль оси Z'). Точнее, рукоятка 102 содержит продолговатую верхнюю часть 112, предназначенную для захвата рукой пилота, продолговатую нижнюю часть 122, выполненную с возможностью взаимодействия с механическими средствами 103 соединения, и промежуточную часть 132 со сферической внешней поверхностью 142.
Каркас 101 содержит несущую часть со сферической внутренней поверхностью 111, которая принимает промежуточную часть 132 рукоятки 102. Таким образом, рукоятка 102 соединена с рамой 101 шаровым соединением 150, образованным внешней сферической поверхностью 142 промежуточной части 132 рукоятки 102 и комплементарной ей внутренней поверхностью 111 несущей части каркаса 101.
Механические средства 103 соединения содержат две пары соединительных элементов, а именно первую пару соединительных элементов 113, 123 и вторую пару соединительных элементов 133, 143.
Каждый из соединительных элементов 113, 123 первой пары установлен с возможностью поворота относительно каркаса 101 вокруг первой оси поворота (оси X) посредством первых поворотных соединений 110 и 120.
Аналогичным образом, каждый из соединительных элементов 133, 143 второй пары установлен с возможностью поворота относительно каркаса 101 вокруг второй оси поворота (оси Y) посредством вторых поворотных соединений 130 и 140.
Когда ручка 100 управления находится в нейтральном положении (т.е. пилот не прикладывает к рукоятке 102 никакого усилия), вторая ось поворота (ось Y) перпендикулярна первой оси поворота (оси X). Кроме того, первая ось поворота и вторая ось поворота пересекаются в точке О пересечения, которая также представляет собой центр поворота рукоятки 102 относительно каркаса 101 и центр шарового соединения 150 (представленного на чертежах смещенным вдоль оси Z' исключительно с целью разнесения изображений элементов конструкции).
Механические средства 103 соединения также содержат четыре набора направляющих 153, 163, 173 и 183, а именно два первых набора направляющих 153, 163 и два вторых набора направляющих 173, 183. Каждый из наборов направляющих содержит направляющую каркаса и направляющую рукоятки.
В каждом из первых наборов направляющих 153, 163 направляющая 154, 164 каркаса скреплена с первыми соединительными элементами 113, 123 так, что поворот первых соединительных элементов 113, 123 вокруг первой оси X поворота также приводит к повороту первых наборов направляющих 153, 163. Кроме того, направляющие 155, 165 рукоятки установлены с возможностью поворота относительно направляющих 154, 164 каркаса вокруг третьей оси поворота (оси Y'), перпендикулярной первой оси поворота (оси X).
Аналогичным образом, в каждом из вторых наборов направляющих 173, 183 направляющая 174, 184 каркаса скреплена со вторыми соединительными элементами 133, 143 так, что поворот вторых соединительных элементов 133, 143 вокруг второй оси Y поворота также приводит к повороту вторых наборов направляющих 173, 183. Кроме того, направляющие 175, 185 рукоятки установлены с возможностью поворота относительно внешних направляющих 174, 184 вокруг четвертой оси поворота (оси X'), перпендикулярной второй оси поворота (оси Y).
В соответствии с описываемым первым вариантом осуществления направляющие 155, 165, 175 и 185 рукоятки образуют промежуточные элементы механических средств 103 соединения, обеспечивающие соединение соединительных элементов с рукояткой 102.
Точнее, в каждом из первых наборов направляющих 153, 163 соответствующая направляющая 155, 165 рукоятки может быть повернута относительно направляющей 154, 164 каркаса (и, следовательно, относительно первого соединительного элемента) вокруг третьей оси поворота под воздействием рукоятки 102. Как видно из фиг. 1В, поворот рукоятки 102 вокруг третьей оси (оси Y') вызывает одновременный поворот вторых наборов направляющих 173, 183 и вторых соединительных элементов 133, 143 относительно каркаса вокруг второй оси поворота (оси Y).
Аналогичным образом, в каждом из вторых наборов направляющих 173, 183 соответствующая направляющая 175, 185 рукоятки может быть повернута относительно направляющей 174, 184 каркаса (и, следовательно, относительно второго соединительного элемента) вокруг четвертой оси поворота под воздействием рукоятки 102. Как видно из фиг. 1А, поворот рукоятки 102 вокруг четвертой оси (оси X') вызывает одновременный поворот первых наборов направляющих 153, 163 и первых соединительных элементов 113, 123 относительно каркаса вокруг первой оси поворота (оси X).
Поэтому наборы направляющих 153, 163, 173, 183 образуют для рукоятки 102 системы координат, поворачивающиеся относительно неподвижной системы координат, определенной каркасом 101.
Как показано на фиг. 2А и 2В, ручка 100 управления содержит соединительный элемент 113, набор направляющих, содержащих направляющую 154 каркаса, зафиксированную относительно соединительного элемента 113, и направляющую 155 рукоятки, подвижную относительно неподвижной направляющей 154 каркаса (и, следовательно, относительно соединительного элемента), и возвращающий орган 156, проходящий от соединительного элемента 113 до подвижной направляющей 155 рукоятки. Возвращающий орган 156 выполнен с возможностью приложения возвратного момента, противодействующего повороту направляющей 155 рукоятки относительно направляющей 154 каркаса, т.е. противодействующего повороту рукоятки 102 относительно каркаса 101. Возвращающий орган 156 содержит линейную спиральную пружину 157 и ленту 158, наматываемую на участок цилиндрической поверхности направляющей 155 рукоятки.
Лента 158 имеет первый конец, прикрепленный к участку цилиндрической поверхности, и второй конец, прикрепленный ко второму концу пружины. Пружина 157 имеет первый конец, прикрепленный к соединительному элементу, и второй конец, прикрепленный ко второму концу ленты. Как показано на фиг. 2В, поворот направляющей 155 рукоятки относительно направляющей 154 каркаса приводит к намотке ленты 158 и растяжению пружины 157, причем удлинение пружины 157 пропорционально углу Θ поворота направляющей 155 рукоятки относительно направляющей 154 каркаса вокруг оси Y'. Такая конструкция позволяет обеспечить образование линейного возвращающего усилия на рукоятке 102.
На фиг. 2А и 2В направляющая 155 рукоятки представляет собой внешнюю направляющую, а направляющая 154 каркаса представляет собой внутреннюю направляющую набора направляющих 153. В связи с этим возвращающий орган 156 прикладывает возвратное усилие к внешней направляющей 155 рукоятки.
На фиг. 3, 4А и 4В представлен пример конструкции, в которой направляющая 175, 185 рукоятки представляет собой внутреннюю направляющую каждого из наборов направляющих 173, 183, а направляющая 174, 184 представляет собой его внешнюю направляющую. Возвращающий орган 176, 186 прикладывает возвратное усилие к внутренней направляющей 175, 185 рукоятки.
На этих чертежах представлены только вторые соединительные элементы 133, 134 и вторые наборы направляющих 173, 183. Однако для первых соединительных элементов 113, 123 и первых наборов направляющих 153, 163 предусмотрена аналогичная конструкция.
Как видно из фиг. 4А и 4В, нижняя часть 122 рукоятки 102 содержит четыре выступа 152, 162, 172 и 182. Кроме того, каждая из направляющих 155, 165, 175 и 185 рукоятки содержит упор. Каждый из выступов 152, 162, 172 и 182 может упираться в соответствующий упор одной из направляющих 155, 165, 175 и 185 рукоятки для поворота направляющей рукоятки.
Выступы и упоры выполнены так, что поворот рукоятки 102 вокруг четвертой оси поворота (оси X') в первом направлении вызывает поворот направляющей 175 рукоятки относительно направляющей 174 каркаса без поворота направляющей 185 рукоятки. Напротив, поворот рукоятки 102 вокруг четвертой оси поворота (оси X') во втором направлении, противоположном первому направлению, вызывает поворот направляющей 185 рукоятки относительно направляющей 184 рамы без поворота направляющей 175 рукоятки.
Поскольку каждая из направляющих 155, 165, 175, 185 рукоятки снабжена собственным возвращающим органом, могут быть предусмотрены возвращающие органы 156, 166, 176, 186, обладающие разными характеристиками, что обеспечивает разные величины возвратного усилия при повороте рукоятки вокруг оси X' и вокруг оси Y'.
Кроме того, предлагаемая конструкция позволяет обеспечить работу возвращающих органов 156, 166, 176, 186 исключительно на натяжение, что исключает потребность в каких бы то ни было направляющих устройствах и устраняет опасность коробления элементов, образующих таки возвращающие органы, а именно ленты 158 или линейной спиральной пружины 157.
Кроме того, данная конструкция обеспечивает возможность осуществления ручки 100 управления, в которой возвращающие органы 156, 166, 176, 186 установлены в заранее натянутом состоянии, т.е. каждый из возвращающих органов 156, 166, 176, 186 прикладывает к рукоятке 102 ненулевое возвратное усилие, когда рукоятка 102 находится в нейтральном положении. Это позволяет создать пороговое усилие, которое должно быть превышено для первоначального смещения рукоятки.
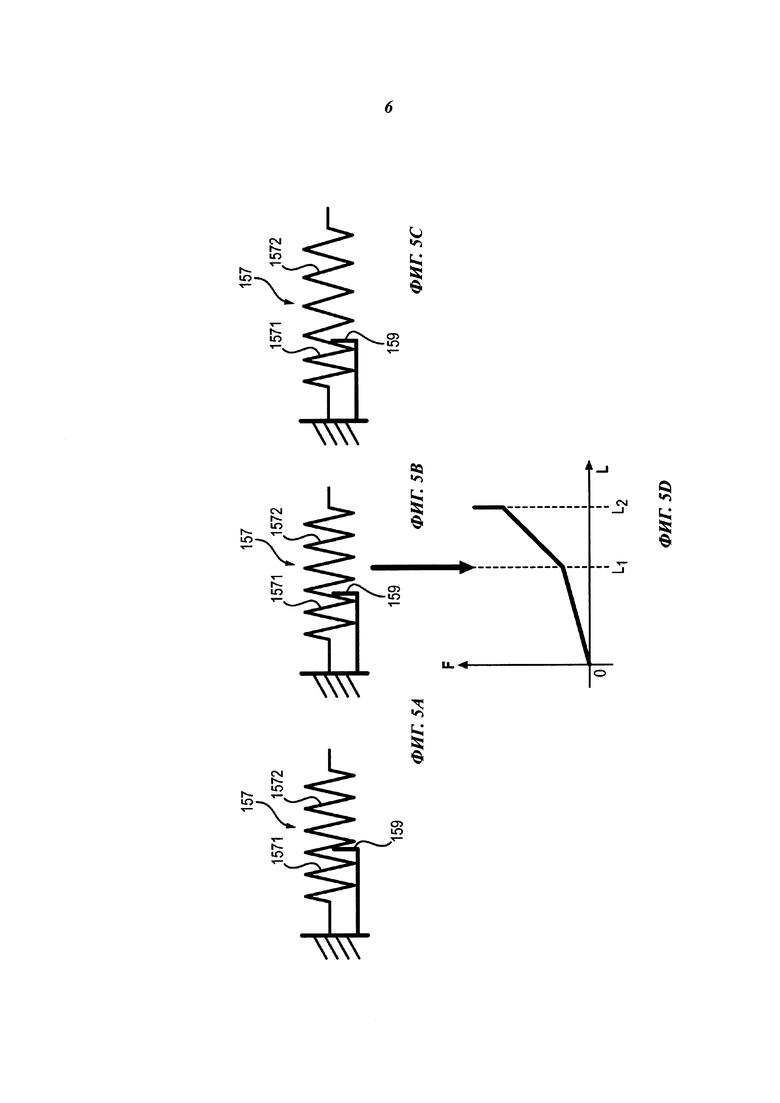
На фиг. 5А-5С схематически представлен пример возвращающего органа 156, позволяющего обеспечить двойную жесткость в направлении поворота.
Для этого возвращающий орган 156 содержит пружину 157 и упор 159. Пружина 157 имеет первый участок 1571 пружины и второй участок 1572 пружины, расположенный последовательно с первым участком 1571 пружины, причем упор 159 размещен между одним из витков первого участка 1571 пружины и одним из витков второго участка 1572 пружины.
На фиг. 5А пружина 157 представлена в исходном нейтральном состоянии, т.е. на рукоятке 102 отсутствуют какие-либо усилия со стороны пилота.
На фиг. 5В и 5С пружина 157 представлена при повороте рукоятки 102 пилотом вокруг оси Y' поворота.
На фиг. 5В представлена первая стадия, на которой пружина 157 растянута до первой длины L1. Два участка 1571 и 1572 пружины растянуты до положения, в котором виток первого участка 1571 пружины упирается в упор 159. После того как виток первого участка 1571 пружины упрется в упор 159, дальнейшее растяжение первого участка 1571 пружины невозможно.
На фиг. 5С представлена вторая стадия, на которой пружина 157 растянута до второй длины L2, большей первой длины L1, но растяжению подвержен лишь второй участок 1572 пружины, поскольку растяжение первого участка 1571 пружины остановлено упором 159.
На фиг. 5D представлена зависимость величины возвратного усилия F, создаваемого возвращающим органом 156, от удлинения L пружины 157. Видно, что зависимость изменения величины создаваемого возвратного усилия F имеет двойной наклон. На первой стадии происходит растяжение обоих участков пружины, в результате чего зависимость представляет собой линейную функцию с первым углом наклона. На второй стадии происходит растяжение только второго участка пружины, в результате чего зависимость представляет собой линейную функцию со вторым углом наклона, большим первого угла наклона.
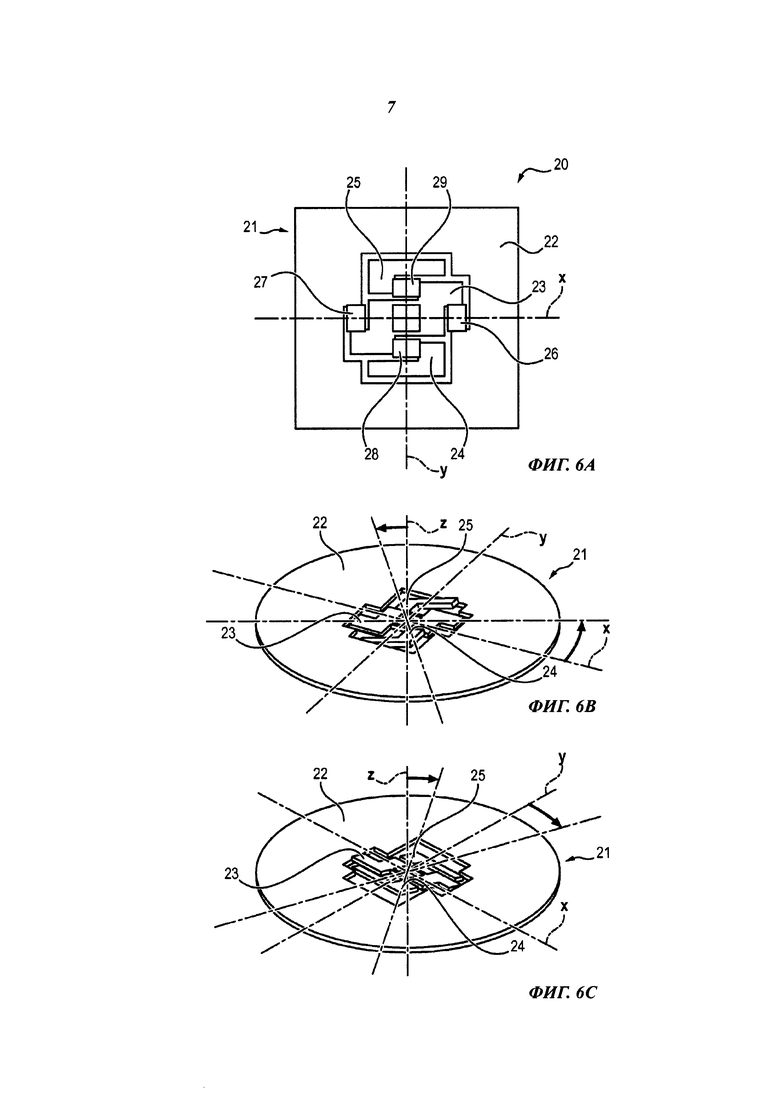
В другом варианте первого варианта осуществления вместо шарового соединения 150 между рукояткой 102 и каркасом 101 может быть использовано карданное соединение 20. На фиг. 6А-6С схематически представлен пример карданной системы 21, которая может быть использована для установки рукоятки 102 на каркасе 101 ручки 100 управления. Представленная система позволяет уменьшить силы трения и исключить всякую опасность застревания. Кроме того, плоская общая форма представленной карданной системы 21 позволяет освободить пространство, расположенное над центром 132 поворота рукоятки 102, что особенно выгодно в условиях недостатка места.
Карданная система 21, представленная на фиг. 6А-6С, содержит плоское основание 22, плоский промежуточный элемент 23 и два несущих элемента 24 и 25. Плоское основание 22 прикреплено к каркасу 101 ручки 100 управления, а рукоятка 102 прикреплена к двум несущим элементам 24 и 25.
Кроме того, карданная система 21 содержит две гибкие пластины 26, 27, соединяющие основание 22 с промежуточным элементом 23 и допускающие поворот промежуточного элемента 23 относительно плоского основания 22 вокруг первой оси поворота (ось x).
Карданная система 21 дополнительно содержит две гибкие пластины 28, 29, соединяющие промежуточный элемент 23 с несущими элементами 24, 25 и допускающие поворот несущих элементов 24, 25 относительно промежуточного элемента 23 вокруг второй оси поворота (ось y), перпендикулярной первой оси поворота. Таким образом, рукоятка 102 может быть повернута относительно корпуса вокруг обеих осей x и y поворота, причем эти оси поворота неподвижны относительно каркаса 101.
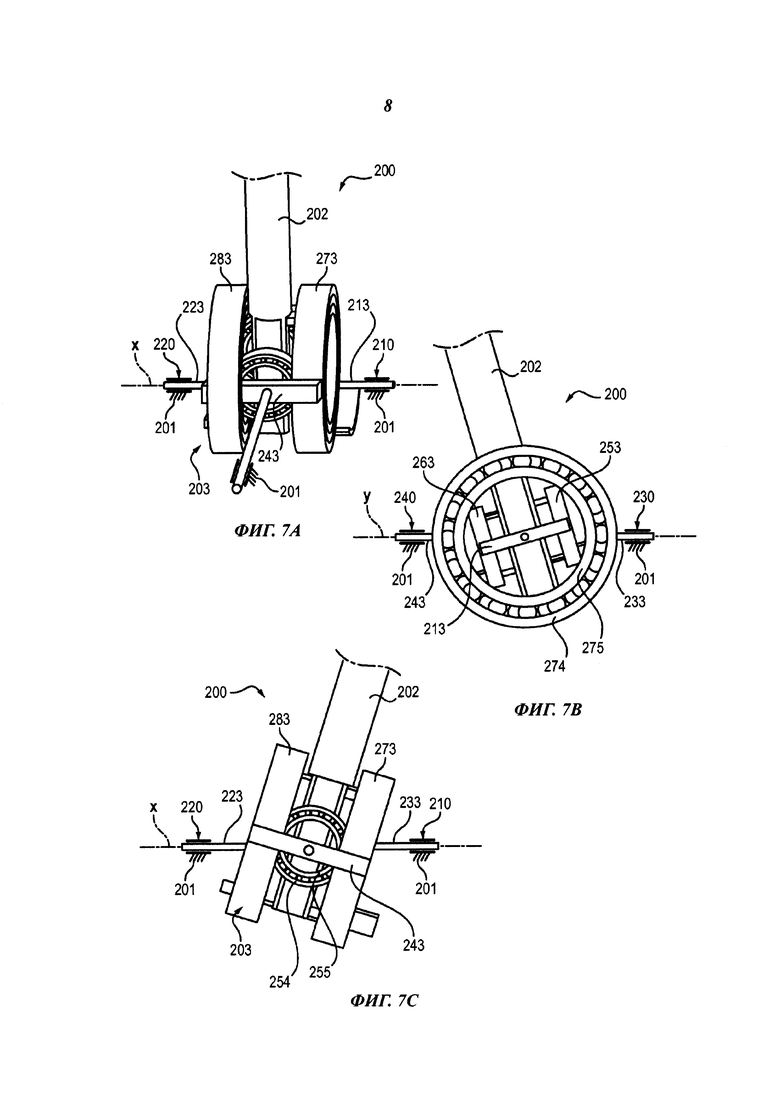
На фиг. 7А-7С схематически представлена ручка 200 управления по второму варианту осуществления изобретения.
В соответствии со вторым вариантом осуществления изобретения вместо наборов направляющих 153, 163, 173 и 183 используются шарикоподшипники 253, 263, 273, 283, причем каждый из подшипников содержит кольцо 255, 265, 275, 285 рукоятки и кольцо 254, 264, 274, 284 каркаса.
В примере, представленном на фиг. 7А-7С, ручка 200 управления содержит каркас 201, рукоятку 202, установленную с возможностью поворота относительно каркаса, и механические средства 203 соединения рукоятки с каркасом.
Механические средства 203 соединения содержат две пары соединительных элементов, включая первую пару соединительных элементов 213, 223 и вторую пару соединительных элементов 233, 243.
Каждый из соединительных элементов 213, 223 первой пары установлен с возможностью поворота относительно каркаса 201 вокруг первой оси поворота (оси X) посредством первых поворотных соединений 210 и 220.
Аналогичным образом, каждый из соединительных элементов 233, 243 второй пары установлен с возможностью поворота относительно каркаса 201 вокруг второй оси поворота (оси Y) посредством вторых поворотных соединений 230 и 240.
Кроме того, механические средства 203 соединения содержат четыре подшипника 253, 263, 273 и 283, образующих первую пару подшипников 253, 263 и вторую пару подшипников 273, 283. Каждый из подшипников содержит кольцо рукоятки и кольцо каркаса.
В каждом из подшипников 253, 263 первой пары кольца 254, 264 каркаса скреплены с первыми соединительными элементами 213, 223 так, что поворот первых соединительных элементов 213, 223 вокруг первой оси X поворота также вызывает поворот подшипников 253, 263. Кроме того, кольца 255, 265 рукоятки установлены с возможностью поворота относительно колец 254, 264 каркаса вокруг третьей оси поворота (оси Y'), перпендикулярной первой оси поворота (оси X).
Аналогичным образом, в каждом из подшипников 273, 283 второй пары кольца 254, 264 каркаса скреплены со вторыми соединительными элементами 233, 243 так, что поворот вторых соединительных элементов 233, 243 вокруг второй оси Y поворота также вызывает поворот подшипников 273, 283. Кроме того, кольца 275, 285 рукоятки установлены с возможностью поворота относительно колец 274, 284 каркаса вокруг четвертой оси поворота (оси X'), перпендикулярной второй оси поворота (оси Y).
В описываемом втором варианте осуществления кольца 255, 265, 275 и 285 рукоятки образуют промежуточные элементы механических средств 203 соединения, соединяющие соединительные элементы с рукояткой 202.
Как показано на фиг. 8А-8С, ручка 200 управления содержит возвращающий орган 256, проходящий от соединительного элемента 223 до кольца 255 рукоятки аналогично первому варианту осуществления. Возвращающий орган 256 выполнен с возможностью приложения возвратного момента, противодействующего повороту кольца 255 рукоятки относительно кольца 254 каркаса, т.е. противодействующего повороту рукоятки 202 относительно каркаса 201. Возвращающий орган 256 содержит линейную спиральную пружину 257 и ленту 258, наматываемую на участок цилиндрической поверхности 259 кольца 255 рукоятки.
Фиг. 8А иллюстрирует состояние возвращающего органа 256 во время нахождения рукоятки 202 в нейтральном положении.
Фиг. 8В иллюстрирует состояние возвращающего органа 256 при повороте рукоятки 202 вокруг оси Y' в первом направлении поворота. Кольцо 255 рукоятки, поворачиваемое рукояткой 202, не увлекает за собой ленту 258, вследствие чего не происходит ее наматывание на цилиндрический участок кольца 255 рукоятки, и растяжение пружины 257 остается неизменным.
Фиг. 8С иллюстрирует состояние возвращающего органа 256 при повороте рукоятки 202 вокруг оси Y' во втором направлении поворота, противоположном первому направлению поворота. Рукоятка 202 поворачивает кольцо 255 рукоятки, что приводит к наматыванию ленты 258 на кольцо 255 рукоятки. Лента 258 производит растяжение пружины 257, причем ее удлинение создает возвратное усилие, противодействующее повороту кольца 255 рукоятки относительно кольца 254 каркаса.
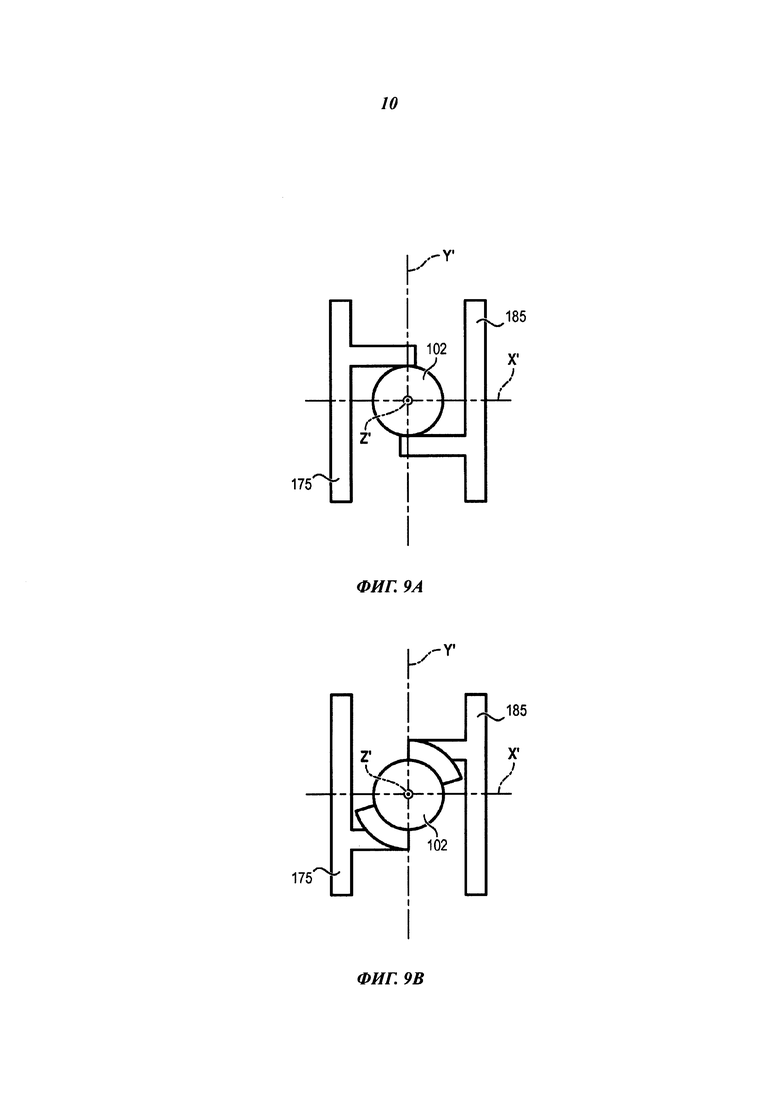
На фиг. 9А и 9В схематически представлена альтернативная конструкция, позволяющая обеспечить развязывание двух направлений поворота вокруг одной и той же оси. В данной конструкции каждая из направляющих 175 и 185 рукоятки содержит упор. Нижняя часть 122 рукоятки 102 может упираться в упоры направляющих 175 и 185 рукоятки для поворота соответствующей направляющей рукоятки.
Упоры выполнены так, что поворот рукоятки 102 вокруг четвертой оси поворота (оси X') в первом направлении приводит к повороту направляющей 175 рукоятки относительно направляющей 174 каркаса без поворота направляющей 185 рукоятки. Напротив, поворот рукоятки 102 вокруг четвертой оси поворота (оси X') во втором направлении приводит к повороту направляющей 185 рукоятки относительно направляющей 184 каркаса без поворота направляющей 175 рукоятки.
На фиг. 9А рукоятка 102 соприкасается с упорами по прямой линии соприкосновения. На фиг. 9В рукоятка 202 соприкасается с упорами на цилиндрической поверхности соприкосновения. В обоих случаях контакт между рукояткой 102 и упорами обеспечивает поворот рукоятки 102 относительно направляющих 175 и 178 рукоятки вокруг оси 21 без какого бы то ни было ненамеренного поворота направляющих 175 и 178 рукоятки относительно направляющих 174 и 184 каркаса, что необходимо для исключения возможности создания взаимозависимости между осями X' и Y'.
Следует отметить, что в альтернативной конструкции по фиг. 9А и 9В должно быть предусмотрено соединение рукоятки 102 с каркасом 101, выполненное, например, в виде шарового соединения 150.
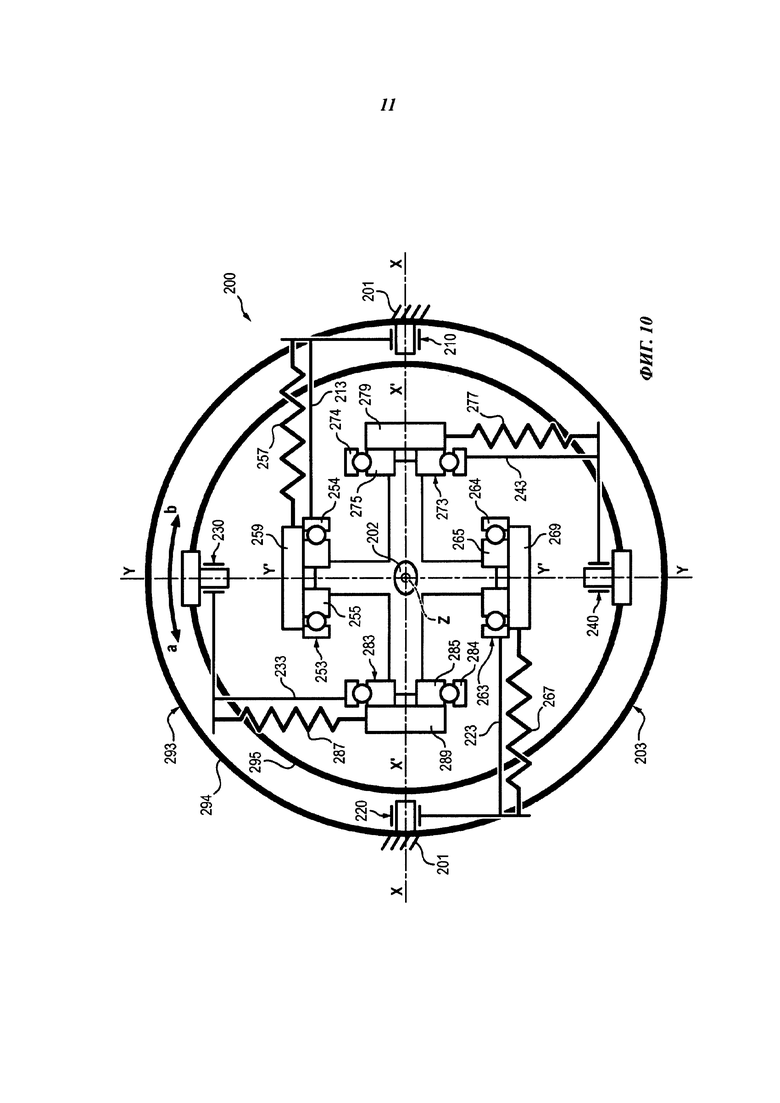
На фиг. 10 схематически представлен первый вариант ручки 200 управления по фиг. 7А-7С.
В данном первом варианте шарниры 220 и 210 прикреплены к каркасу 201, а шарниры 230 и 240 установлены с возможностью поворота относительно каркаса 201. Другими словами, вторые соединительные элементы 233 и 243 установлены с возможностью поворота относительно каркаса 201 вокруг пятой оси (оси Z), причем данная пятая ось перпендикулярна первой оси (оси X) и второй оси (оси Y) и проходит через центр О поворота рукоятки 202.
Для этого механические средства 203 соединения содержат пятый подшипник 293, содержащий внешнее кольцо 294, зафиксированное относительно каркаса 201, и внутреннее кольцо 295, установленное с возможностью поворота относительно внешнего кольца 294 (и, следовательно, каркаса 201) вокруг оси Z. Соединительные элементы 233 и 234 установлены на внутреннем кольце 295 с возможностью поворота вокруг оси Y посредством шарниров 230 и 240.
Такая конструкция допускает поворот фиксированной системы координат (оси Y, определенной соединительными элементами 233 и 243) относительно другой фиксированной системы координат (оси X, определенной соединительными элементами 213 и 223) вокруг оси Z, причем обе оси X' и Y' поворачивающейся системы координат остаются неподвижными и взаимно ортогональными.
Такая конструкция позволяет изменять угол между первой осью X поворота и второй осью Y поворота, причем первая ось поворота остается неподвижной относительно каркаса 201.
Благодаря такой конструкции может быть получено рассогласование между второй осью Y поворота и третьей осью Y поворота. Такая дополнительная степень свободы, вызванная проекцией векторов поворота, обеспечивает возможность одновременного поворота рукоятки 202 вокруг первой оси X поворота и второй оси Y поворота.
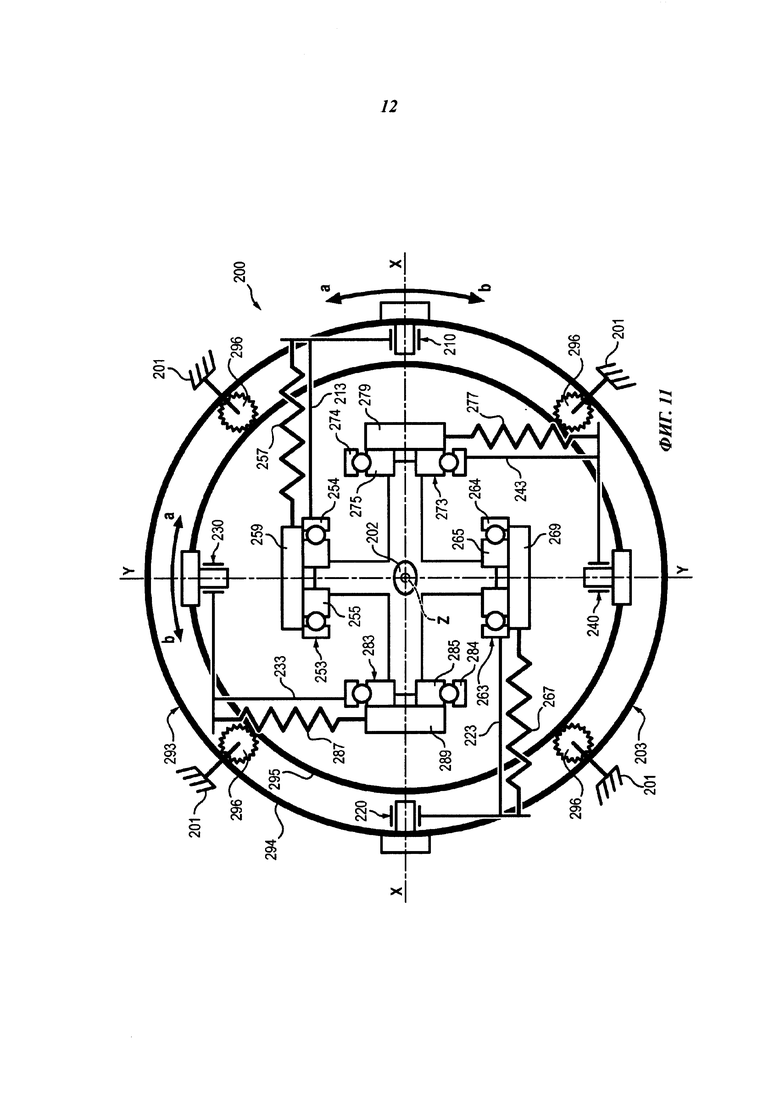
На фиг. 11 схематически представлен второй вариант ручки управления по фиг. 7А-7С, в котором первая ось X поворота и вторая ось Y поворота подвижны относительно каркаса 201.
В данном втором варианте механические средства 203 соединения содержат пятый подшипник 293, содержащий внешнее кольцо 294 и внутреннее кольцо 295, причем оба кольца 294 и 295 установлены с возможностью поворота относительно каркаса 201 вокруг оси Z. Механические средства 203 соединения также содержат несколько роликов 296, размещенных между кольцами 294 и 295 и установленных с возможностью поворота относительно каркаса 201 вокруг собственных осей, параллельных оси Z и зафиксированных относительно каркаса 201.
Ролики 296 позволяют связать поворот колец 294 и 295 так, чтобы поворот одного из колец относительно каркаса 201 в одном направлении вызывал одновременный поворот второго кольца на равный угол в противоположном направлении.
Такая конструкция обеспечивает возможность поворота фиксированных систем координат X и Y (одна из которых определена соединительными элементами 213 и 223, а другая - соединительными элементами 233 и 243) одной относительно другой вокруг оси Z, при этом обе оси X' и Y' поворачивающейся системы координат остаются неподвижными и взаимно ортогональными.
Благодаря такой конструкции может быть получено рассогласование, с одной стороны, между первой осью X поворота и четвертой осью X' поворота, а с другой стороны, - между второй осью Y поворота и третьей осью Y' поворота, причем такие рассогласования симметричны.
Кроме того, благодаря наличию дополнительной степени свободы, обеспечиваемой проекцией векторов поворота, данная конструкция обеспечивает возможность одновременного поворота рукоятки 202 вокруг первой оси X поворота и вокруг второй оси Y поворота без поворота рукоятки вокруг оси Z'.
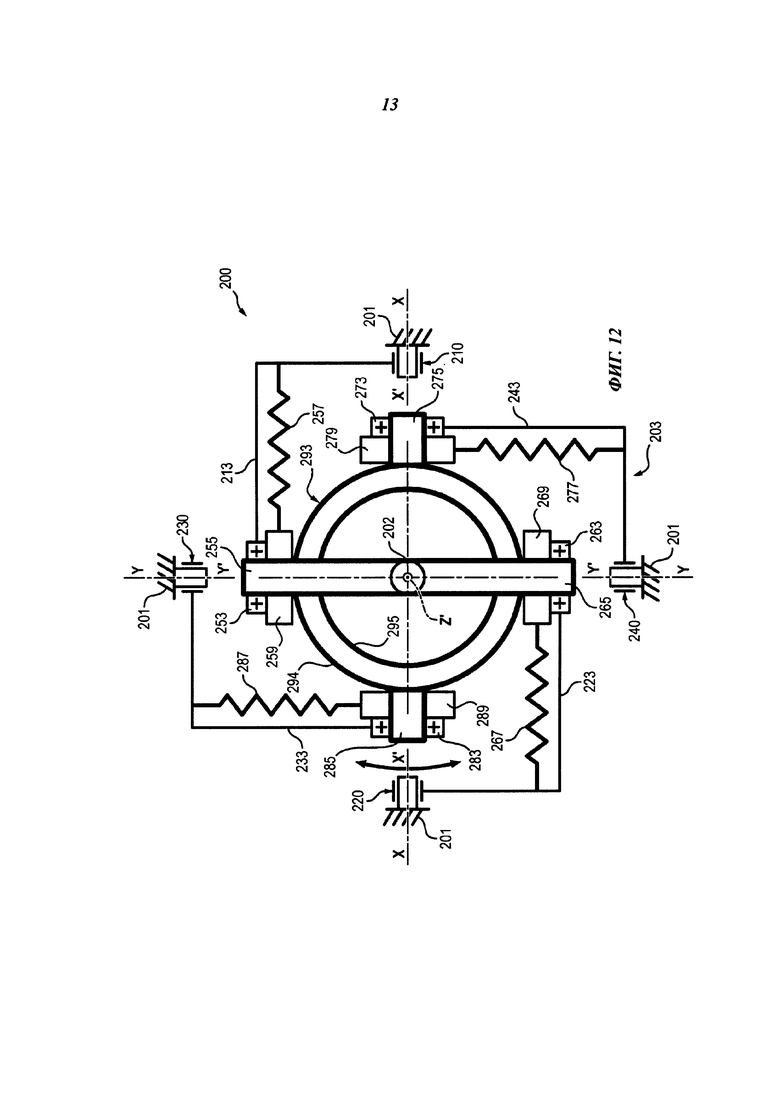
На фиг. 12 схематически представлен третий вариант осуществления ручки 200 управления по фиг. 7А-7С, в котором подшипники установлены с возможностью поворота.
В данном третьем варианте подшипники 253 и 263 зафиксированы относительно рукоятки 202, а подшипники 273 и 283 установлены с возможностью поворота относительно рукоятки 202. Другими словами, промежуточные элементы 275 и 285 (образованные подвижными кольцами подшипников 273 и 283) установлены с возможностью поворота относительно рукоятки 202 вокруг пятой оси (оси Z'), причем пятая ось перпендикулярна третьей оси (оси Y') и четвертой оси (оси X') и проходит через центр О поворота рукоятки 202.
Для этого механические средства 203 соединения содержат пятый подшипник 293, содержащий внутреннее кольцо 295, зафиксированное относительно рукоятки 202, и внешнее кольцо 294, установленное с возможностью поворота относительно внутреннего кольца 295 (и, следовательно, относительно рукоятки 202) вокруг оси Z'. Промежуточные элементы 275 и 285 прикреплены к внешнему кольцу 294 подшипника 293.
Такая конструкция обеспечивает поворот рукоятки 202 относительно поворачивающейся системы координат (определенной соединительными элементами 233 и 243) вокруг оси Z' (продольной оси рукоятки 202).
Данная конструкция позволяет изменять величину угла между третьей осью Y' поворота и четвертой осью X' поворота, причем третья ось Y' поворота неподвижна относительно рукоятки 202.
Благодаря такой конструкции может быть получено рассогласование между третьей осью Y' поворота и второй осью Y поворота. Данная дополнительная степень свободы, обеспечиваемая проекцией векторов поворота, обеспечивает возможность одновременного поворота рукоятки 202 вокруг первой оси X поворота и вокруг второй оси Y поворота.
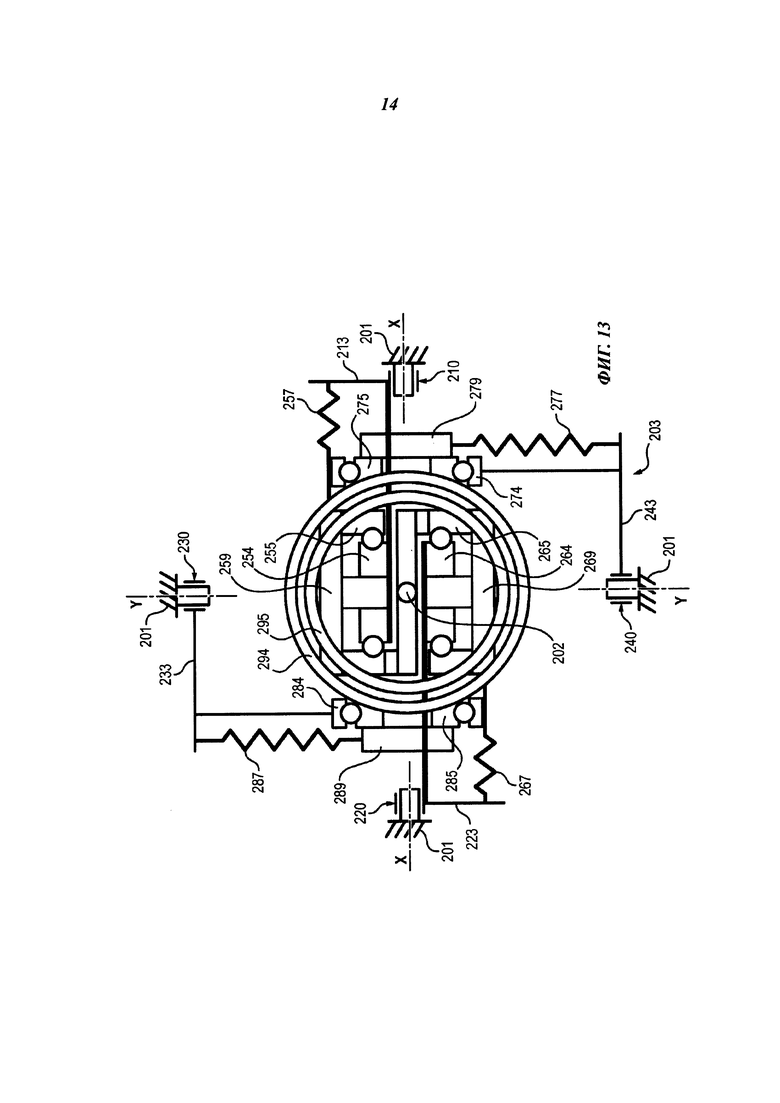
На фиг. 13 схематически представлен четвертый вариант осуществления ручки управления по фиг. 7А-7С. Данный четвертый вариант функционально аналогичен третьему варианту. В то время как третий вариант допускает использование одинаковых подшипников 253, 263, 273 и 283, четвертый вариант более компактен, поскольку в нем использованы вложенные подшипники.
В данном четвертом варианте внешнее кольцо 294 пятого подшипника 293 прикреплено к внутренним кольцам 275 и 285 рукоятки подшипников 273 и 283 второй пары.
Внутреннее кольцо 295 пятого подшипника 293 прикреплено к внешним кольцам 255 и 265 рукоятки подшипников 253 и 263 первой пары.
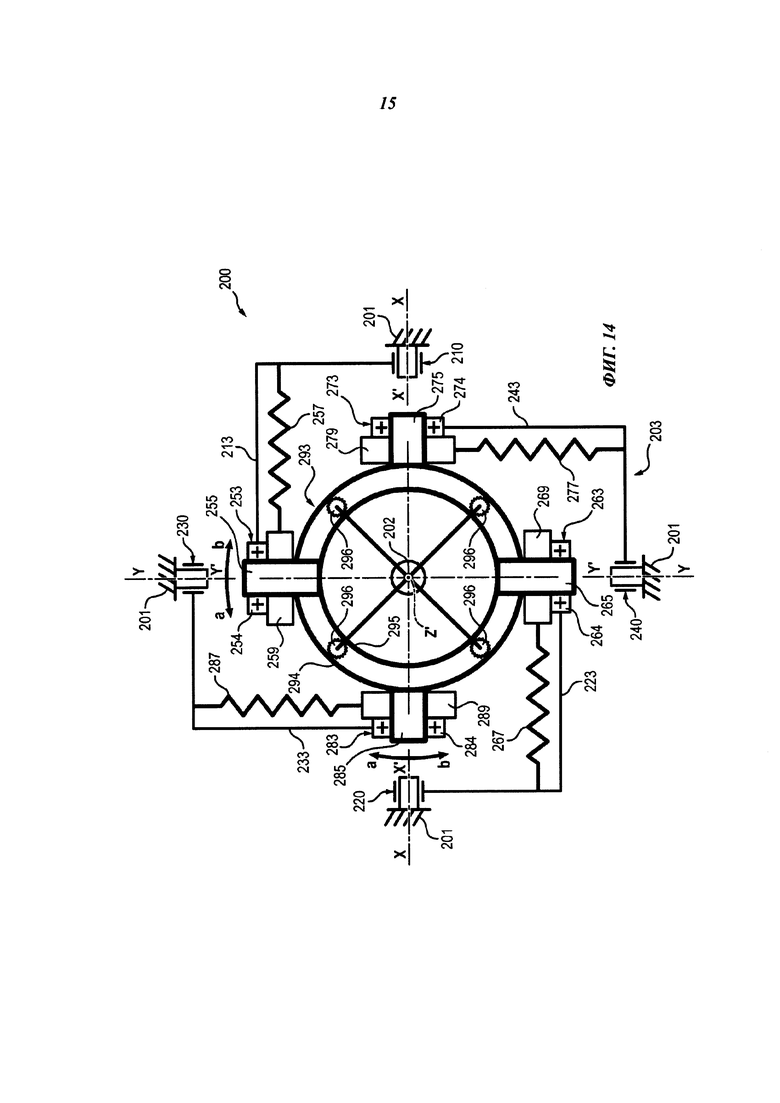
На фиг. 14 схематически представлен пятый вариант осуществления ручки управления по фиг. 7А-7С, в котором четвертая ось X' поворота и третья ось Y' поворота подвижны относительно рукоятки 202.
В данном пятом варианте механические средства 203 соединения содержат пятый подшипник 293, содержащий внешнее кольцо 294 и внутреннее кольцо 295, причем оба кольца 294 и 295 установлены с возможностью поворота относительно рукоятки 202 вокруг оси Z'. Механические средства 203 соединения также содержат несколько роликов 296, размещенных между кольцами 294 и 295 и установленных с возможностью поворота относительно рукоятки вокруг своих осей, параллельных оси Z' и зафиксированных относительно рукоятки 202.
Ролики 296 позволяют связать поворот колец 294 и 295 так, чтобы поворот одного из колец относительно рукоятки 202 в одном направлении вызывал одновременный поворот второго кольца на равный угол в противоположном направлении.
Такая конструкция обеспечивает возможность поворота рукоятки 202 относительно каждой поворачивающейся системы координат (определенных соответственно соединительными элементами 213 и 223 и соединительными элементами 233 и 243) вокруг оси Z'.
Благодаря такой конструкции может быть получено рассогласование, с одной стороны, между первой осью X поворота и четвертой осью X' поворота, а с другой стороны, - между второй осью Y поворота и третьей осью Y' поворота, причем такие рассогласования симметричны.
Кроме того, благодаря наличию дополнительной степени свободы, обеспечиваемой проекцией векторов поворота, данная конструкция обеспечивает возможность одновременного поворота рукоятки 202 вокруг первой оси X поворота и вокруг второй оси Y поворота без поворота рукоятки вокруг оси Z'.
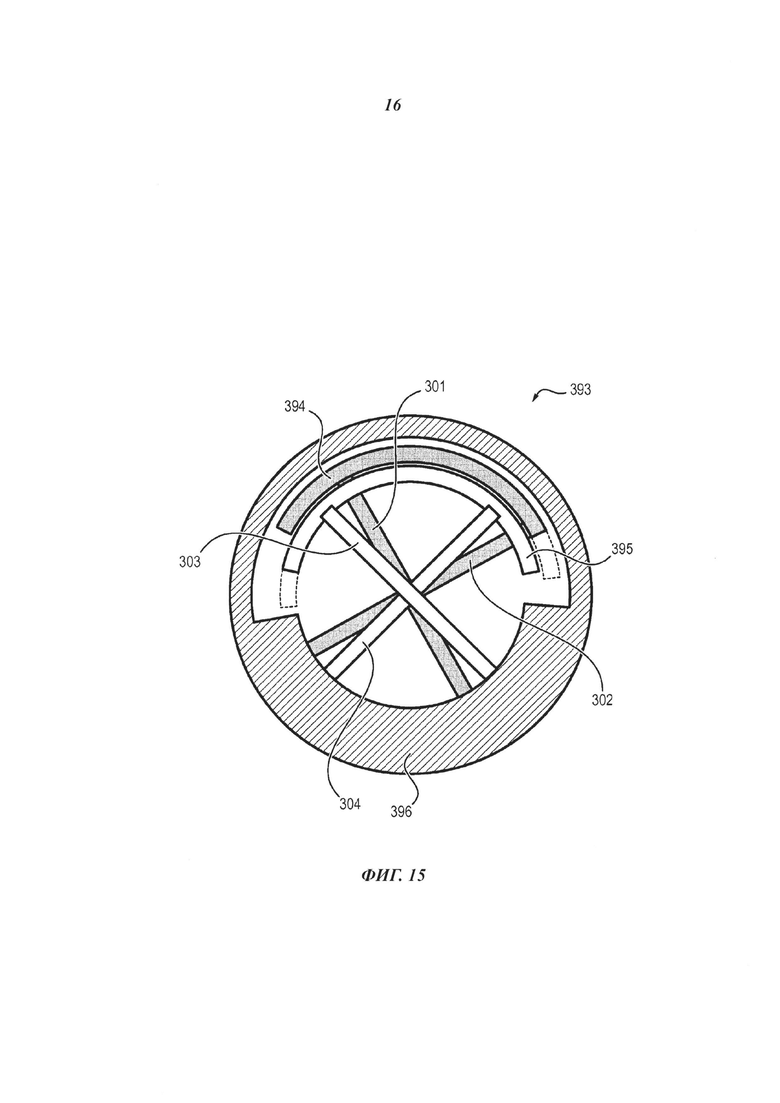
На фиг. 15 схематически представлен соединительный орган 393, который может быть использован в варианте по фиг. 14 вместо пятого подшипника 293 и нескольких соответствующих роликов 296.
Представленный соединительный орган 393 содержит первую часть 394, вторую часть 395 и третью часть 396. Первая часть 394 подвижна относительно третьей части 396. Аналогичным образом, вторая часть 395 подвижна относительно третьей части 396.
Соединительный орган 393 также содержит две пары гибких пластин 301 и 302, 303 и 304. Каждая из гибких пластин 301, 302 первой пары соединяет первую часть 394 с третьей частью 396 и является упругодеформируемой, обеспечивая возможность поворота третьей части 396 относительно первой части 394. Гибкие пластины 301 и 302 могут создавать возвратный момент, направленный на противодействие повороту одной из частей 394 и 396 относительно другой.
Аналогичным образом, каждая из гибких пластин 303, 304 второй пары соединяет вторую часть 395 с третьей частью 396 и является упругодеформируемой, обеспечивая возможность поворота третьей части 396 относительно второй части 395. Гибкие пластины 303 и 304 могут создавать возвратный момент, направленный на противодействие повороту одной из частей 395 и 396 относительно другой.
Первая часть 394 прикреплена к промежуточным элементам 275 и 285.
Вторая часть 395 прикреплена к промежуточным элементам 255 и 265.
Третья часть 396 прикреплена к рукоятке 202.
Как и в случае ручки управления по фиг. 14, данная конструкция допускает поворот рукоятки 202 относительно каждой из поворачиваемых систем координат (одна из которых определена соединительными элементами 213 и 223, а другая - соединительными элементами 233 и 243) вокруг оси Т.
Благодаря такой конструкции может быть получено рассогласование, с одной стороны, между первой осью X поворота и четвертой осью X' поворота, а с другой стороны, - между второй осью Y поворота и третьей осью Y' поворота, причем такие рассогласования симметричны.
Кроме того, благодаря наличию дополнительной степени свободы, обеспечиваемой проекцией векторов поворота, данная конструкция обеспечивает возможность одновременного поворота рукоятки 202 вокруг первой оси X поворота и вокруг второй оси Y поворота без поворота рукоятки вокруг оси Z'.
Ссылочные обозначения
100 Ручка управления (первый вариант осуществления)
101 Каркас
102 Рукоятка
103 Механические средства соединения
110 Поворотное соединение (ось X)
111 Внутренняя сферическая поверхность
112 Верхняя часть рукоятки
113 Соединительный элемент (первая пара)
120 Поворотное соединение (ось X)
122 Нижняя часть рукоятки
123 Соединительный элемент (первая пара)
130 Поворотное соединение (ось Y)
132 Промежуточная часть рукоятки
133 Соединительный элемент (вторая пара)
140 Поворотное соединение (ось Y)
142 Внешняя сферическая поверхность
143 Соединительный элемент (вторая пара)
150 Шаровое соединение
152 Выступ
153 Набор направляющих (первые наборы)
154 Направляющая каркаса
155 Направляющая рукоятки
156 Возвращающий орган
157 Линейная спиральная пружина
158 Лента
159 Упор
162 Выступ
163 Набор направляющих (первые наборы)
164 Направляющая каркаса
165 Направляющая рукоятки
166 Возвращающий орган
172 Выступ
173 Набор направляющих (вторые наборы)
174 Направляющая каркаса
175 Направляющая рукоятки
176 Возвращающий орган
182 Выступ
183 Набор направляющих (вторые наборы)
184 Направляющая каркаса
185 Направляющая рукоятки
186 Возвращающий орган
200 Ручка управления (второй вариант осуществления)
201 Каркас
202 Рукоятка
203 Механические средства соединения
210 Поворотное соединение (ось X)
213 Соединительный элемент (первая пара)
220 Поворотное соединение (ось X)
222 Нижняя часть рукоятки
223 Соединительный элемент (первая пара)
230 Поворотное соединение (ось Y)
233 Соединительный элемент (вторая пара)
240 Поворотное соединение (ось Y)
243 Соединительный элемент (вторая пара)
253 Шарикоподшипник (первая пара)
254 Кольцо каркаса
255 Кольцо рукоятки
256 Возвращающий орган
257 Линейная спиральная пружина
258 Лента
259 Участок цилиндрической поверхности
263 Шарикоподшипник (первая пара)
264 Кольцо каркаса
265 Кольцо рукоятки
266 Возвращающий орган
267 Линейная спиральная пружина
269 Участок цилиндрической поверхности
273 Шарикоподшипник (вторая пара)
274 Кольцо каркаса
275 Кольцо рукоятки
276 Возвращающий орган
277 Линейная спиральная пружина
279 Участок цилиндрической поверхности
283 Шарикоподшипник (вторая пара)
284 Кольцо каркаса
285 Кольцо рукоятки
286 Возвращающий орган
287 Линейная спиральная пружина
289 Участок цилиндрической поверхности
293 Пятый подшипник
294 Внешнее кольцо
295 Внутреннее кольцо
296 Ролики
301 Гибкая пластина (первая пара)
302 Гибкая пластина (первая пара)
303 Гибкая пластина (вторая пара)
304 Гибкая пластина (вторая пара)
20 Карданное соединение
21 Карданная система
22 Плоское основание
23 Промежуточный элемент
24 Несущий элемент
25 Несущий элемент
26 Гибкая пластина
27 Гибкая пластина
28 Гибкая пластина
29 Гибкая пластина
393 Соединительный орган
394 Первая часть соединительного органа
395 Вторая часть соединительного органа
396 Третья часть соединительного органа
1571 Первый участок пружины
1572 Второй участок пружины
Изобретение относится к конструкциям ручных органов управления воздушным судном. Ручка (200) управления воздушным судном содержит каркас (201), рукоятку (202), установленную с возможностью поворота относительно каркаса, и механические средства (203) соединения рукоятки с каркасом. Механические средства (203) содержат первый соединительный элемент (213, 223), установленный с возможностью перемещения относительно каркаса (201) вокруг первой оси (X), второй соединительный элемент (233, 243), установленный с возможностью перемещения относительно каркаса (201) вокруг второй оси (Y), образующей отличный от нуля угол с первой осью. Третий промежуточный элемент (255, 265) установлен с возможностью поворота относительно первого элемента (213, 223) вокруг третьей оси (Y'). Четвертый промежуточный элемент (275, 285) установлен с возможностью поворота относительно второго соединительного элемента (233, 243) вокруг четвертой оси (X'), образующей отличный от нуля угол с третьей осью. Соединительные элементы (213, 223; 233, 243) или промежуточные элементы (255, 265; 275, 285) установлены с возможностью поворота относительно друг друга вокруг пятой оси (Z'). Достигается независимость возвратных усилий, действующих на рукоятку, по двум осям поворота. 18 з.п. ф-лы, 15 ил.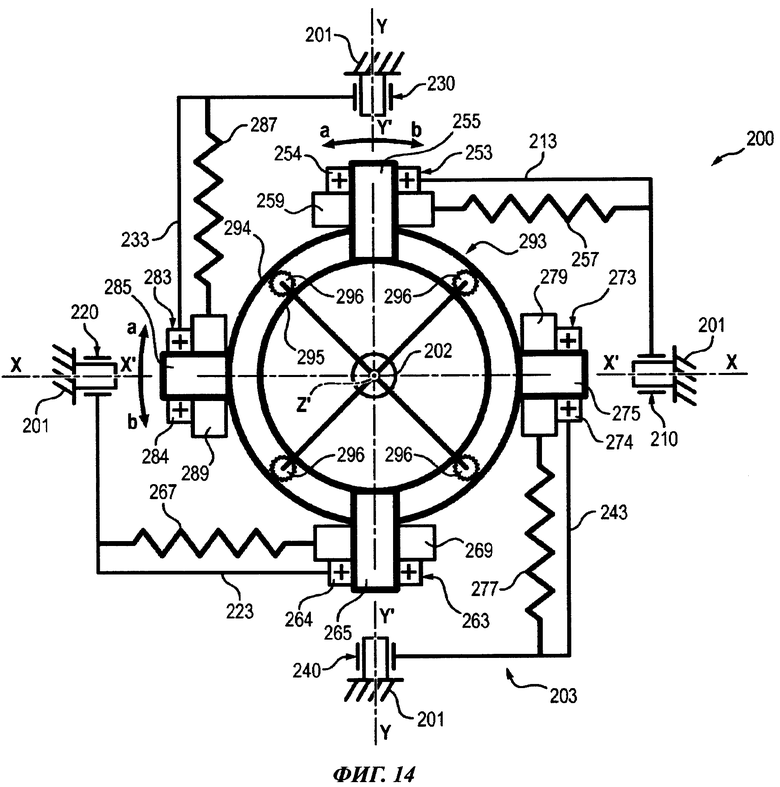
1. Ручка (100, 200) управления для управления воздушным судном, содержащая каркас (101, 201), рукоятку (102, 202), установленную с возможностью поворота относительно каркаса, и механические средства (103, 203) соединения рукоятки с каркасом, причем механические средства (103, 203) соединения содержат:
- первый соединительный элемент (113, 123, 213, 223), установленный с возможностью перемещения относительно каркаса (101, 201) вокруг первой оси (X) поворота,
- второй соединительный элемент (133, 143, 233, 243), установленный с возможностью перемещения относительно каркаса (101, 201) вокруг второй оси (Y) поворота, причем вторая ось поворота образует ненулевой угол с первой осью поворота,
- третий промежуточный элемент (155, 165, 255, 265), установленный с возможностью поворота относительно первого соединительного элемента (113, 123, 213, 223) вокруг третьей оси (Y') поворота,
- четвертый промежуточный элемент (175, 185, 275, 285), установленный с возможностью поворота относительно второго соединительного элемента (133, 143, 233, 243) вокруг четвертой оси (X') поворота, причем четвертая ось поворота образует ненулевой угол с третьей осью поворота,
при этом соединительные элементы (113, 123, 213, 223; 133, 143, 233, 243) или промежуточные элементы (155, 165, 255, 265; 175, 185, 275, 285) установлены с возможностью поворота относительно друг друга вокруг пятой оси (Z, Z') поворота, образующей ненулевой угол соответственно с первой осью (X) поворота и второй осью (Y) поворота или с третьей осью (X') поворота и четвертой осью (Y') поворота так, чтобы обеспечить возможность изменения соответственно угла между первой осью поворота и второй осью поворота или угла между третьей осью поворота и четвертой осью поворота.
2. Ручка управления по п. 1, отличающаяся тем, что механические средства (203) соединения содержат соединительный орган (293), содержащий внешнее кольцо (294) и внутреннее кольцо (295), установленные с возможностью поворота одно относительно другого вокруг пятой оси (Z, Z') поворота, причем каждый из соединительных элементов (213, 223; 233, 243) или соответственно промежуточных элементов (255, 265; 275, 285) соединен с соответствующим кольцом (294, 295) соединительного органа (293), а рукоятка (102, 202) скреплена с третьим промежуточным элементом (255, 265) и/или с четвертым промежуточным элементом (275, 285).
3. Ручка управления по п. 2, отличающаяся тем, что одно из колец (294) соединительного органа (293) зафиксировано относительно первого соединительного элемента (213, 223), а второе кольцо (295) зафиксировано относительно второго соединительного элемента (233, 243).
4. Ручка управления по п. 3, отличающаяся тем, что одно из колец (294 или 295) соединительного органа (293) зафиксировано относительно каркаса (201) так, чтобы обеспечить возможность поворота только первого соединительного элемента (213, 223) или только второго соединительного элемента (233, 243) относительно каркаса (201) вокруг пятой оси (Z) поворота.
5. Ручка управления по п. 3, отличающаяся тем, что соединительный орган (293) содержит по меньшей мере один ролик (296), установленный с возможностью поворота вокруг оси поворота, зафиксированной относительно каркаса (201), причем ролик (296) размещен между внутренним кольцом (295) и внешним кольцом (294) так, что поворот одного из колец относительно каркаса (201) вызывает одновременный поворот другого кольца относительно каркаса (201) в противоположном направлении.
6. Ручка управления по п. 2, отличающаяся тем, что одно из колец (295) соединительного органа (293) зафиксировано относительно третьего промежуточного элемента (255, 265), а другое кольцо (294) зафиксировано относительно четвертого промежуточного элемента (275, 285).
7. Ручка управления по п. 6, отличающаяся тем, что одно из колец (294 или 295) соединительного органа (293) зафиксировано относительно рукоятки (202) так, чтобы обеспечить возможность поворота рукоятки (202) только относительно третьего промежуточного элемента (255, 265) или только относительно четвертого промежуточного элемента (275, 285) вокруг пятой оси (Z') поворота.
8. Ручка управления по п. 6, отличающаяся тем, что соединительный орган (293) содержит по меньшей мере один ролик (296), установленный с возможностью поворота вокруг оси поворота, зафиксированной относительно рукоятки (202), причем ролик (296) размещен между внутренним кольцом (295) и внешним кольцом (294) так, что поворот одного из колец (294, 295) относительно рукоятки (202) вызывает одновременный поворот второго кольца (294, 295) относительно рукоятки (202) в противоположном направлении.
9. Ручка управления по п. 1, отличающаяся тем, что механические средства (203) соединения содержат соединительный орган (393), содержащий неподвижную часть (396) и часть (394, 395), установленную с возможностью перемещения относительно неподвижной части, при этом соединительный орган (393) содержит по меньшей мере две гибкие пластины (301, 302; 303, 304), и каждая из гибких пластин (301, 302; 303, 304) соединяет между собой части (394, 395, 396) и является упругодеформируемой для обеспечения возможности поворота подвижной части (394, 395) относительно неподвижной части (396), причем гибкие пластины (301, 302; 303, 304) выполнены с возможностью создания возвратного момента, направленного на противодействие повороту частей (394, 395, 396) относительно друг друга.
10. Ручка управления по п. 9, отличающаяся тем, что третий промежуточный элемент (255, 265) или четвертый промежуточный элемент (275, 285) прикреплен к одной части (394, 395) соединительного органа (393), а рукоятка (202) прикреплена к другой части (396) соединительного органа (393).
11. Ручка управления по п. 1, отличающаяся тем, что рукоятка (102, 202) соединена с каркасом (101, 201) шаровым соединением (150), обеспечивающим поворот рукоятки (102, 202) относительно каркаса (101, 201) вокруг трех осей (X, Y, Z; Z') поворота.
12. Ручка управления по п. 1, отличающаяся тем, что рукоятка (102, 202) соединена с каркасом (101, 201) карданным соединением, обеспечивающим только поворот рукоятки (102, 202) относительно каркаса (101, 201) вокруг первой оси (X) и поворот рукоятки (102, 202) относительно каркаса (101, 201) вокруг второй оси (Y).
13. Ручка управления по п. 12, отличающаяся тем, что рукоятка (102, 202) выполнена с возможностью прихода в состояние простого упора с третьим промежуточным элементом и с четвертым промежуточным элементом для осуществления поворота промежуточных элементов соответственно вокруг третьей и четвертой осей (Y', X') так, чтобы обеспечить возможность относительного поворота промежуточных элементов относительно рукоятки (102, 202) вокруг пятой оси (Z, Z') поворота.
14. Ручка управления по п. 13, отличающаяся тем, что один из промежуточных элементов содержит упор, выполненный так, чтобы обеспечить возможность контакта рукоятки (202) с упором для приложения усилия к промежуточному элементу и поворота промежуточного элемента в одном направлении усилия.
15. Ручка управления по п. 14, отличающаяся тем, что рукоятка (202) выполнена с возможностью контакта с упором по прямой линии соприкосновения, параллельной пятой оси (Z, Z') поворота.
16. Ручка управления по п. 14, отличающаяся тем, что рукоятка (202) выполнена с возможностью контакта с упором по цилиндрической поверхности соприкосновения, ось вращения которой параллельна пятой оси (Z, Z') поворота.
17. Ручка управления по п. 1, отличающаяся тем, что содержит возвращающий орган (156, 166, 176, 186, 256, 266, 276, 286), выполненный с возможностью приложения усилия к одному из промежуточных элементов (155, 165, 175, 185, 255, 265, 275, 285) соединительного органа (253, 263, 273, 283) для противодействия повороту промежуточного элемента.
18. Ручка управления по п. 17, отличающаяся тем, что возвращающий орган (156, 166, 176, 186, 256, 266, 276, 286) содержит пружину (157, 167, 177, 187, 257, 267, 277, 287) растяжения, соединяющую первый соединительный элемент (113, 123, 213, 223) или второй соединительный элемент (133, 143, 233, 243) с промежуточным элементом (155, 165, 175, 185, 255, 265, 275, 285), поворачиваемым под воздействием рукоятки (202).
19. Ручка управления по п. 18, отличающаяся тем, что возвращающий орган (156, 166, 176, 186, 256, 266, 276, 286) содержит ленту (158, 258), соединяющую пружину (157, 167, 177, 187, 257, 267, 277, 287) растяжения с промежуточным элементом (155, 165, 175, 185, 255, 265, 275, 285), причем лента выполнена с возможностью наматывания на цилиндрический элемент (259, 269, 279, 289) и скреплена с промежуточным элементом (155, 165, 175, 185, 255, 265, 275, 285).
| US 2004130530 A1, 07.07.2004 | |||
| БОКОВАЯ РУКОЯТКА УПРАВЛЕНИЯ | 1991 |
|
RU2018458C1 |
| US 6128971 A, 10.10.2000 | |||
| US 6328127 B1, 11.12.2001. | |||

