Изобретение относится к космической технике и может быть использовано при проектировании и управлении низкоорбитальных космических аппаратов (КА) связи типа «Гонец» в части способа и системы телеметрического контроля для их управления.
Известны способы и радиотелеметрические системы для управления КА, включающие последовательно подключенные телеметрические датчики, кодирующее устройство, радиопередатчик и радиоприемник, устройство декодирования, регистрирующее устройство (см., например, патент РФ №2134488).
Наиболее близким аналогом, выбранным в качестве прототипа заявленного изобретения, является способ управления бортовой аппаратурой, реализованный в радиотехническом комплексе КА «Гонец», включающий традиционную телеметрическую систему (см., например, патент РФ №2440677).
Недостатком известных способов и систем является неудовлетворительная оперативность управления КА, обусловленная дискретностью связи с наземным комплексом управления (НКУ), что приводит к снижению эффективности функционирования космической системы, особенно в периоды отсутствия прямой радиовидимости между КА и НКУ и при возникновении на борту отказов и нештатных ситуаций, нахождение в которых ограничено во времени.
Необходимость регулярного и обязательного привлечения наземного комплекса управления каждого КА спутниковой группировки усложняет технологичность процессов управления как отдельными КА, так и всей спутниковой группировки этих КА.
Наиболее близким аналогом в части устройства для реализации предложенного способа является бортовой комплекс управления (БКУ), предназначенный для организации внутреннего и внешнего управления КА, включая взаимодействие с НКУ при решении задач управления работой бортовых систем КА автономно или совместно с НКУ, контроля и диагностики состояния бортовых систем, обеспечения процессов управления и контроля в реальном масштабе времени. БКУ включает последовательно подключенные к командному радиоканалу НКУ бортового радиоприемника, программно-временного устройства, соединенного с исполнительными органами КА, запоминающего устройства и бортового радиопередатчика, связанного через телеметрическую радиолинию с НКУ, а также генератор временных сигналов, подключенный между выходом бортового радиоприемника и входом программно-временного устройства (см., например, Низкоорбитальная космическая система персональной спутниковой связи и передачи данных, изд. Юлис, 2011, стр. 45).
Недостатком этого аналога является низкая надежность при возникновении на борту КА нештатных ситуаций.
Задачей, решаемой предложенным изобретением, является повышение оперативности и надежности управления КА.
Решение указанной задачи обеспечивается за счет того, что на борту КА сигналы телеконтроля с выходов каждого из телеметрических датчиков сравнивают с установленными пороговыми значениями уровней сигналов ключевых элементов. При превышении каждого из сигналов телеконтроля величины установленного порогового значения уровня сигнала ключевого элемента выдается ключевой сигнал, запускающий формирование сигнала с установленной длительностью импульса, длительность которого не превышает времени поступления очередного сигнала телеконтроля, являющегося определением факта срабатывания ключевого элемента и свидетельствующего о возникновении нештатной ситуации. При совпадении ключевого сигнала и сигнала установленной длительности импульса с бортовым временным сигналом формируют общий сигнал совпадения в виде совокупности сигналов совпадения и преобразуют его в позиционный сигнал, а затем в цифровой сигнал, соответствующий номеру команды управления, поступающей на исполнительные органы КА. Цифровые сигналы номеров команд управления для контроля поступают в НКУ, от которого на борт КА поступают необходимые корректирующие сигналы управления и сигналы коррекции бортового времени.
Для реализации предложенного способа в состав бортовой системы КА, включающей бортовой радиотехнический комплекс, состоящий из последовательно подключенных к командному радиоканалу НКУ бортового радиоприемника, программно-временного устройства, соединенного с исполнительными органами, запоминающего устройства и бортового радиопередатчика, связанного через телеметрическую радиолинию с НКУ, генератор временных сигналов, подключенный между выходом бортового радиоприемника и входом программно-временного устройства, дополнительно включены последовательно подключенные к выходам телеметрических датчиков ключевые элементы, схемы И, преобразователь позиционного кода в цифровой и преобразователь цифрового кода в команду управлении, выход которого подключен к входам исполнительных органов и запоминающего устройства, выход каждого ключевого элемента через генератор длительности импульса подключен ко вторым входам схем И, к третьим входам которых подключен выход генератора временных сигналов.
Ключевые элементы и схемы И являются ключевыми элементами радиоэлектронной техники (см., например, Зубчук В.И., Сигорский В.П., Шкуро А.Н. Справочник по цифровой схемотехнике. Киев, изд. «Техника», 1990, стр. 36, 42, 53). Указанные ключевые элементы срабатывают при превышении входного сигнала установленного порогового значения на другом входе. Схемы И срабатывают при одновременном совпадении сигналов на их входах. Совокупность сигналов с выхода схем И является позиционным кодом (см., например, И. Яглом. Системы счисления. Квант. 1970, №6, стр. 2-10, Д. Поселов. Арифметические основы вычислительных машин дискретного действия. Высшая школа. 1970).
Позиционный код преобразуется в цифровой с помощью преобразователя позиционного кода в цифровой (ПК-Ц), например, матрично-диодного типа (см., например, И. Балагин. Передача дискретной информации и телеграфия. Транспорт, 1971. Стр. 352, А. Алексенко. Основы микросхемотехники. М.: Сов. Радио. – 1971. Стр. 112). Каждый цифровой сигнал соответствует определенной команде управления, вырабатываемой в преобразователе цифрового кода в команду управления (Ц-КУ), который может быть выполнен по предыдущей схеме.
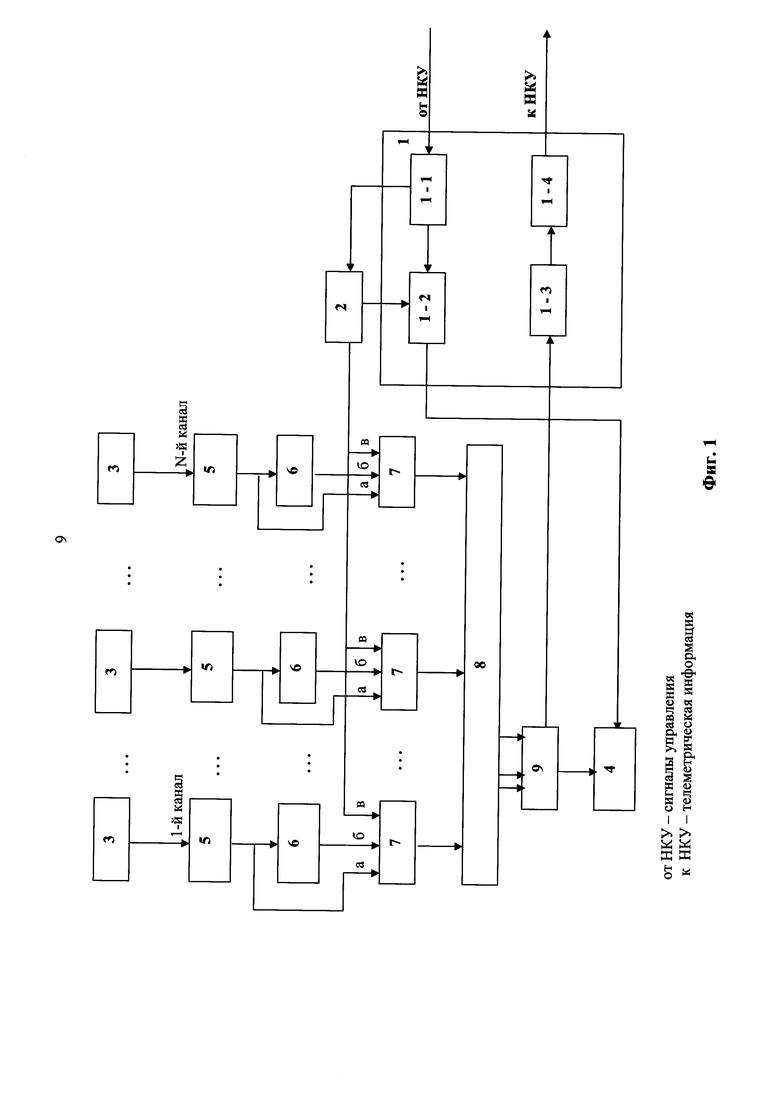
На фиг. 1 представлена схема предлагаемого устройства системы телеметрического контроля низкоорбитальных КА связи, где:
1. Бортовой радиотехнический комплекс (БРТК).
1-1. Бортовой радиоприемник (БРПМ).
1-2. Программно-временное устройство (ПВУ).
1-3. Запоминающее устройство (ЗУ).
1-4. Бортовой радиопередатчик (БРПД).
2. Генератор временных сигналов (ГВС).
3. Телеметрические датчики (ТМД).
4. Исполнительные органы (ИО).
5. Ключевые элементы (КЭ).
6. Генератор длительности импульсов (ГДИ).
7. Схемы И (И).
8. Преобразователь позиционного кода в цифровой (ПК-Ц).
9. Преобразователь цифрового кода в команду управления (Ц-КУ).
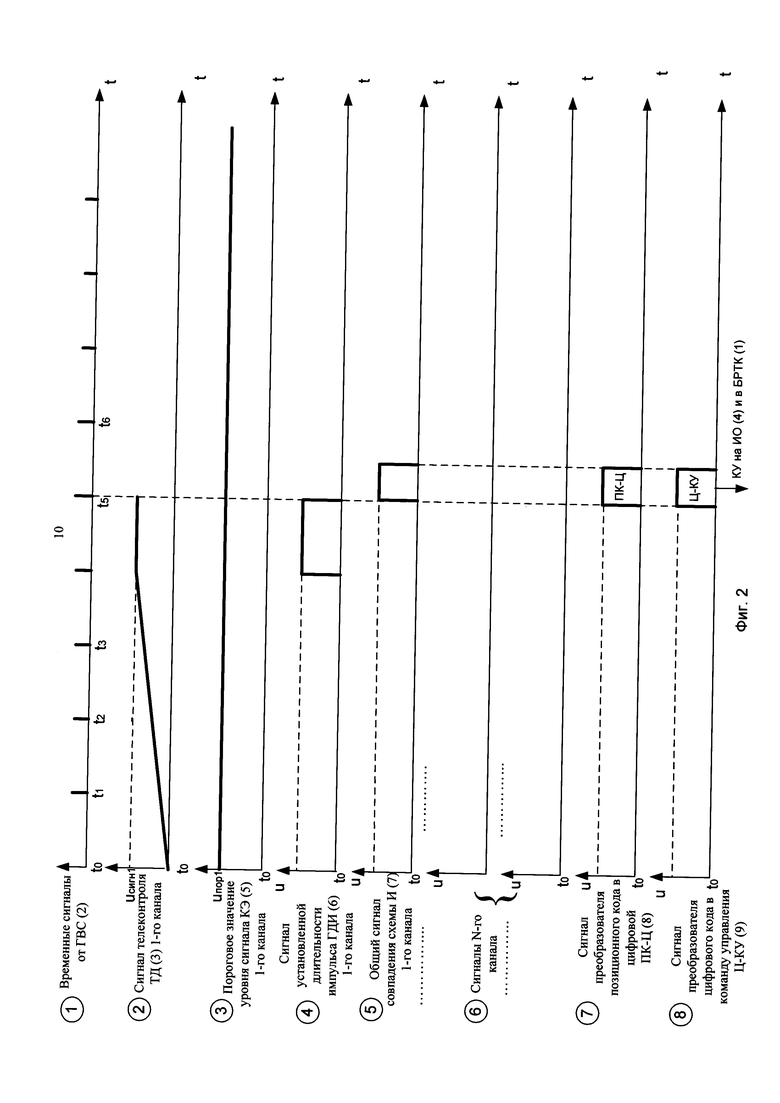
На фиг. 2 представлены эпюры сигналов, формируемых схемой представленного на фиг. 1 устройства системы телеметрического контроля низкоорбитальных КА связи, где:
 - Временные сигналы от ГВС (2);
- Временные сигналы от ГВС (2);
 - Сигнал телеконтроля ТД (3) 1-го канала;
- Сигнал телеконтроля ТД (3) 1-го канала;
 - Пороговое значение уровня сигнала КЭ (5) 1-го канала;
- Пороговое значение уровня сигнала КЭ (5) 1-го канала;
 - Сигнал установленной длительности импульса ГДИ (6) 1-го канала;
- Сигнал установленной длительности импульса ГДИ (6) 1-го канала;
 - Общий сигнал совпадения схемы И (7) 1-го канала;
- Общий сигнал совпадения схемы И (7) 1-го канала;
 - Сигналы N-го канала;
- Сигналы N-го канала;
 - Сигнал преобразователя позиционного кода в цифровой ПК-Ц (8);
- Сигнал преобразователя позиционного кода в цифровой ПК-Ц (8);
 - Сигнал преобразователя цифрового кода в команду управления Ц-КУ (9).
- Сигнал преобразователя цифрового кода в команду управления Ц-КУ (9).
Система работает следующим образом.
К выходу каждого телеметрического датчика (3) подключены ключевые элементы (5), число которых определяется количеством датчиков по каждому параметру телеконтроля. Выход каждого из ключевых элементов (5) непосредственно и через генератор длительности импульсов (6) соединен, соответственно, с первыми (а) и вторыми (б) входами схем И (7), на третьи входы (в) которых поступают временные сигналы от генератора временных сигналов (2), соединенного с бортовым радиоприемником (1-1) бортового радиотехнического комплекса (1).
После поступления сигнала телеконтроля с телеметрических датчиков (3) на ключевые элементы (5) и превышения ими порогового значения с выходов ключевых элементов (5) ключевой сигнал поступает на вход генератора длительности импульса (6), формирующего сигнал установленного уровня длительности импульса . При совпадении событий - сигнала с выходов ключевых элементов (5), сигнала установленного уровня длительности импульса (6) и ожидаемого времени события с выхода генератора временных сигналов (2) - срабатывает конкретная схема И (7), позиционный сигнал (позиционный код) , с выхода которой поступает на вход преобразователя позиционного кода в цифровой (8), с выхода которого цифровой сигнал (цифровой код) поступает на вход преобразователя цифрового кода в команду управления (9), где преобразуется в команды управления , которые поступают для отработки на исполнительные органы (4) для переключения режимов работы и комплектов бортовой аппаратуры КА, устраняя этим нештатные ситуации. На исполнительные органы (4) могут поступать (через программно-временное устройство (1-2)) и команды управления от НКУ.
Контроль осуществляется по телеметрическому каналу, по которому команды управления от преобразователя цифрового кода в команду управления (9) поступают в НКУ через блоки запоминающего устройства (1-3) и бортового радиопередатчика (1-4) бортового радиотехнического комплекса (1).
Таким образом, нештатные и технологические ситуации, возникающие на борту КА, отрабатываются автономно, а их отработка контролируется НКУ и при необходимости по каналу управления от НКУ на борт КА поступают корректирующие команды управления и сигналы коррекции бортового времени, чем и обеспечивается повышение оперативности управления КА. При этом повышается надежность и технологичность процессов управления за счет автономного выхода КА из нештатных ситуаций, возникающих, например, при нахождении КА вне зоны радиовидимости НКУ.
Предложенное изобретение реализуется в настоящее время в бортовом комплексе управления КА «Гонец-М» (ОАО «Спутниковая система «Гонец»), проходящего летные испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ многоконтурного управления космическими аппаратами связи и система для его реализации | 2017 |
|
RU2729152C2 |
| Способ передачи цифровых сигналов по каналам спутниковой связи и система для его реализации | 2017 |
|
RU2742107C2 |
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОЙ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2181527C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ В ПОЛЕТЕ И НАЗЕМНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2588178C1 |
| КОМАНДНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2692418C2 |
| Способ управления движением центра масс низкоорбитального космического аппарата | 2023 |
|
RU2837207C1 |
| Способ управления ориентацией космического аппарата | 2021 |
|
RU2760818C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2625171C2 |
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1992 |
|
RU2047908C1 |
Группа изобретений относится к космической технике и может быть использована в системе телеметрического контроля. В способе телеметрического контроля сигналы с выходов каждого из телеметрических датчиков сравнивают с установленными пороговыми значениями уровней сигналов ключевых элементов. При превышении пороговых значений выдается ключевой сигнал в генератор длительности импульса, что приводит к запуску сигнала установленной длительности импульса. При совпадении ключевого сигнала и сигнала установленной длительности импульса с бортовым временным сигналом формируют общий позиционный сигнал совпадения и преобразуют его в цифровой сигнал, соответствующий номеру команды управления. В бортовом радиотехническом комплексе к выходам телеметрических датчиков дополнительно последовательно подключены ключевые элементы, схемы И, преобразователь позиционного кода в цифровой и преобразователь цифрового кода в команду управления. Техническим результатом группы изобретений является повышение оперативности и надежности управления КА. 2 н.п. ф-лы, 2 ил.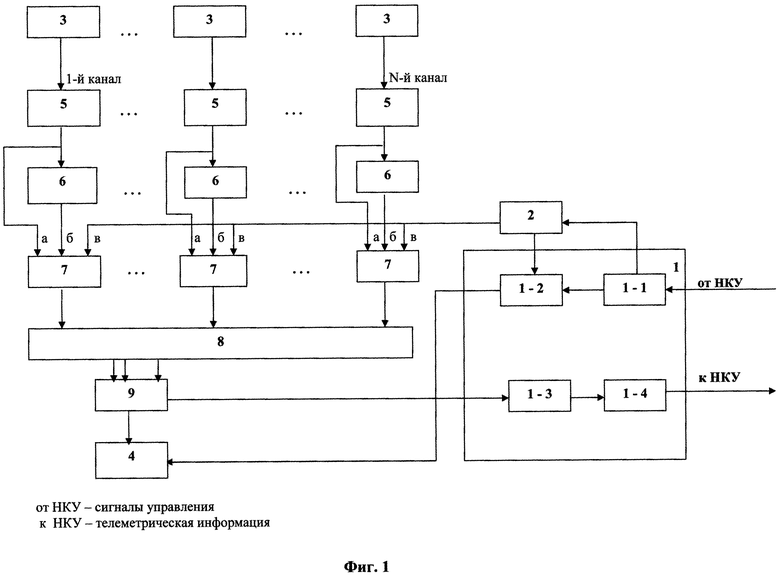
1. Способ телеметрического контроля для управления низкоорбитальными космическими аппаратами связи, при котором на борту космического аппарата формируют сигналы телеметрических датчиков и из наземного комплекса управления в бортовой комплекс управления поступают цифровые сигналы команд управления и сигналы коррекции бортового времени, отличающийся тем, что сигналы телеконтроля с выходов каждого из телеметрических датчиков сравнивают с установленными пороговыми значениями уровней сигналов соответствующих ключевых элементов, при превышении которых выдается ключевой сигнал в генератор длительности импульса и запускается сигнал установленной длительности импульса, при совпадении сигнала ключевого элемента и сигнала установленной длительности импульса с бортовым временным сигналом на выходе схем И из совокупности сигналов совпадения формируют общий сигнал совпадения, который преобразуют в позиционный сигнал, с последующим его преобразованием в цифровой сигнал, соответствующий номеру команды управления, поступающей на исполнительные органы космического аппарата, цифровые сигналы номеров команд управления поступают в наземный комплекс управления, который осуществляет контроль выполнения этих команд и передает на борт космического аппарата корректирующие сигналы управления и сигналы коррекции бортового времени.
2. Устройство для реализации способа телеметрического контроля для управления низкоорбитальными космическими аппаратами связи, включающее бортовой радиотехнический комплекс, состоящий из последовательно подключенных к командному радиоканалу от наземного комплекса управления бортового радиоприемника, программно-временного устройства с телеметрическими датчиками, связанного с исполнительными органами, запоминающего устройства и бортового радиопередатчика, связанного через телеметрическую радиолинию с наземным комплексом управления, генератор временных сигналов, подключенный между выходом бортового радиоприемника и входом программно-временного устройства, отличающееся тем, что к выходам телеметрических датчиков дополнительно последовательно подключены ключевые элементы, схемы И, преобразователь позиционного кода в цифровой и преобразователь цифрового кода в команду управления, выход которого подключен к входам исполнительных органов и запоминающего устройства, выход каждого ключевого элемента подключен к первым входам схем И и через генератор длительности импульса подключен ко вторым входам схем И, к третьим входам которых подключен выход генератора временных сигналов.
| СПОСОБ УПРАВЛЕНИЯ БОРТОВОЙ АППАРАТУРОЙ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2440677C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ РАДИОТЕЛЕМЕТРИЧЕСКИХ СИГНАЛОВ | 1994 |
|
RU2126139C1 |
| US 5187805 A1, 16.02.1993 | |||
| А.И | |||
| Галькевич и др | |||
| Низкоорбитальная космическая система персональной спутниковой связи и передачи данных | |||
| - М.: ООО "Издательство Юлис", 2011 | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |

