Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционного радиоволнового средства обнаружения (СО) с широкой зоной обнаружения (ЗО) для сигнализационного прикрытия места пересечения трех дорог.
Нарушитель, продвигаясь по местности, как правило, использует существующую дорожную сеть. Достоверная информация, по какой дороге, и в каком направлении двигается нарушитель, облегчает задачу силам реагирования по его задержанию. Поэтому сигнализационному прикрытию дорог уделяется значительное внимание [1]. Одним из основных элементов дорожной сети является место пересечения трех дорог [2]. Для охранного мониторинга места пересечения трех дорог могут применяться однопозиционные радиоволновые средства обнаружения с широкой зоной обнаружения (до 20-25 м). В настоящее время российские производители выпускают современные СО с рабочей частотой излучаемого сигнала 10,5 ГГц (Х-диапазон), что уменьшает влияние вибрации опоры, на которую устанавливается СО, и формирует широкую зону обнаружения (фиг. 1). [3]
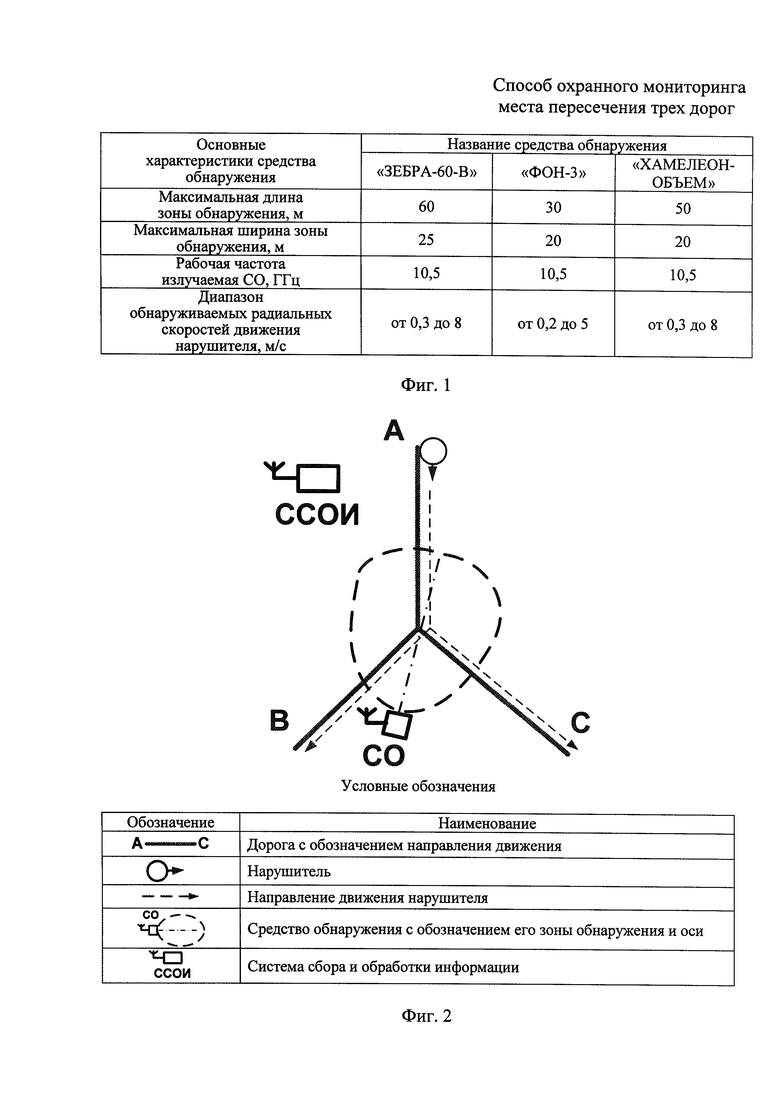
Известен способ охранного мониторинга места пересечения трех дорог, заключающийся в развертывании однопозиционного радиоволнового средства обнаружения с широкой зоной обнаружения в месте пересечения дорог, так, чтобы его зона обнаружения пересекала все три дороги; выдаче сигнала тревоги средством обнаружения в случае пересечения его зоны обнаружения нарушителем, двигающегося в пешем порядке или на транспортном средстве; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов средства обнаружения в течение всего времени нахождения нарушителя в его зоне обнаружения; последующем применении алгоритма определения факта движения нарушителя через место пересечения трех дорог по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала (фиг. 2). [4]
Главным недостатком известного способа является низкая точность указания направления движения нарушителя (устанавливается только факт движения нарушителя - к или от СО).
Целью изобретения является повышение точности указания направления движения обнаруженного нарушителя, с применением только одного однопозиционного радиоволнового средства обнаружения.
Для достижения поставленной цели разработан способ охранного мониторинга места пересечения трех дорог, заключающийся в развертывании СО в месте пересечения трех дорог, так, чтобы его ЗО пересекала все три дороги и ее ось была смещена относительно места пересечения трех дорог таким образом, чтобы отношение длин участков дорог, находящихся в зоне обнаружения было 1:5:5; выдаче сигнала тревоги СО в случае пересечения его ЗО нарушителем; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; последующем применении алгоритма определения направления движения нарушителя, в котором отраженный сигнал делится на два временных промежутка, отличающихся значением доплеровской добавки частоты и (или) ее знаком; анализируются принадлежность отношения значений доплеровской добавки частоты первого и второго промежутка отраженного сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом углов, под которыми нарушитель движется к оси ЗО, и неравномерности скорости его движения; анализируется принадлежность отношения длительностей первого и второго временных промежутков сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом отношения длин участков дорог, находящихся в ЗО, и неравномерности скорости движения нарушителя, (фиг. 3).
Известно, что частота сигнала, отраженного от движущейся цели (нарушителя), отличается от частоты зондирующего сигнала и зависит от значения и направления радиальной скорости нарушителя относительно СО. [5]
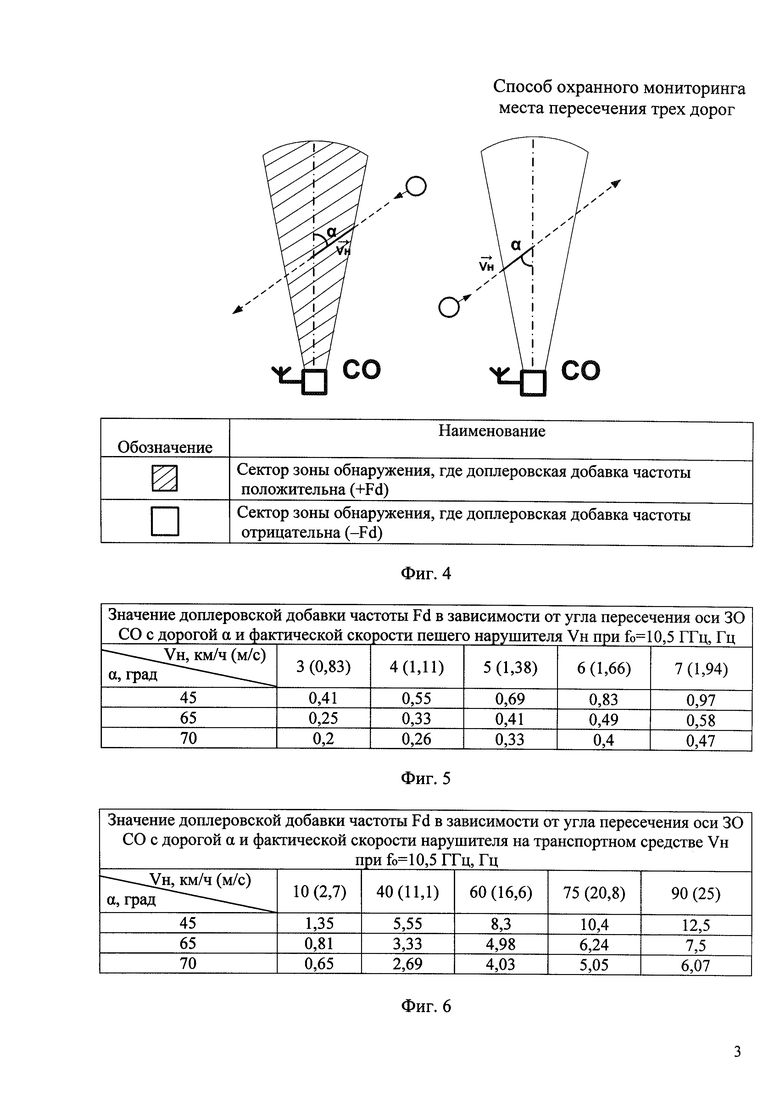
При приближении нарушителя к СО вектор радиальной скорости нарушителя направлен к СО и поэтому доплеровская добавка частоты в отраженном сигнале - положительная (фиг. 4):

где ƒc - частота отраженного сигнала от цели, Гц;
ƒo - рабочая частота излучаемого сигнала СО, Гц;
Fd - доплеровская добавка частоты, Гц.
При удалении нарушителя от СО, вектор радиальной скорости нарушителя направлен от СО и поэтому доплеровская добавка частоты в отраженном сигнале - отрицательная (фиг. 4):

Доплеровская добавка частоты определяется отношением:

где Vr - радиальная скорость движения нарушителя, м/с;
с - скорость света, м/с.
В свою очередь, радиальная скорость движения нарушителя определяется отношением:

где Vн - скорость движения нарушителя по дороге, м/с;
α - угол пересечения оси 30 СО с дорогой, град.
То есть, радиальная скорость нарушителя, а следовательно доплеровская добавка частоты отраженного сигнала зависит от угла, под которым нарушитель движется относительно к оси ЗО (фиг. 5, 6).
При движении нарушителя по дороге АО скорость нарушителя равна радиальной скорости, так как ось ЗО СО параллельна дороге (cos 0°=1), поэтому (фиг. 3):

На участке дороги ВО или СО доплеровская добавка частоты будет зависеть от угла α (фиг. 3):

где α - угол пересечения оси ЗО СО с дорогой ВО или СО, град.
Отраженный сигнал условно можно разделить на два временных промежутка: первый и второй временные промежутки, которые отличаются друг от друга значением доплеровской добавки частоты и (или) ее знаком. Отношение длительностей этих двух промежутков сигнала могут быть примерно одинаковым или отличатся в несколько раз.
Изменения значения доплеровской добавки частоты и (или) ее знака происходят после прохождения нарушителем центра пересечения дорог и обусловлены особенностью схемой развертывания СО, предусматривающей следующее отношение длин участков дорог, находящихся в ЗО (фиг. 3):

где ВО', АО', СО' - находящиеся в ЗО СО участки дорог ВО, АО, СО, соответственно, м.
Конкретная комбинация перечисленных признаков соответствует одному из шести возможных направлений движения нарушителя (АВ, АС, В А, СА, ВС, СВ) (фиг. 7):
1. При движении нарушителя в направлении АВ доплеровская добавка частоты отраженного сигнала будет положительная, при этом на участке А'О ее частота "выше" чем на участке ОВ', так как его радиальная скорость после прохождения центра пересечения дорог уменьшается. Причем длительность первого временного промежутка сигнала с большим значением доплеровской добавки в несколько раз "больше" длительности второго временного промежутка сигнала с меньшей доплеровской добавкой (фиг.7).
2. При движении нарушителя в направлении АС доплеровская добавка частоты отраженного сигнала будет положительная, при этом на участке А'О ее частота "выше" чем на участке ОС, а длительность первого временного промежутка сигнала с большим значением доплеровской добавки и второго временного промежутка сигнала с меньшей доплеровской добавкой примерно "равная" (фиг. 7).
3. При движении нарушителя в направлении ВА доплеровская добавка частоты отраженного сигнала будет отрицательная, при этом на участке В'О ее частота "ниже" чем на участке OA', причем длительность первого временного промежутка сигнала с меньшим значением доплеровской добавки в несколько раз "меньше" длительности второго временного промежутка сигнала (фиг. 7).
4. При движении нарушителя в направлении СА доплеровская добавка частоты отраженного сигнала будет отрицательная, при этом на участке СО ее частота "ниже" чем на участке OA', а длительность первого временного промежутка сигнала с меньшим значением доплеровской добавки и второго временного промежутка сигнала с большей доплеровской добавкой примерно "равная" (фиг. 7).
5. При движении нарушителя в направлении ВС доплеровская добавка частоты отраженного сигнала будет знакопеременная, при этом на участке В'О и ОС ее частота будет примерно "одинаковая", причем длительность первого временного промежутка сигнала в несколько раз "меньше" длительности второго временного промежутка сигнала (фиг. 7).
6. При движении нарушителя в направлении СВ доплеровская добавка частоты отраженного сигнала будет знакопеременная, при этом на участках СО и ОВ' ее частота будет примерно "одинаковая", а длительность первого временного промежутка сигнала в несколько раз "больше" длительности второго временного промежутка сигнала (фиг. 7).
Алгоритм определения направления движения нарушителя возможно записать с применением аппарата нечеткого вывода [6]. Для этого необходимо построить графики функции принадлежности терм-множеств (диапазонов):
- отношение значений доплеровской добавки частоты первого и второго временных промежутков отраженного сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом углов, под которыми нарушитель движется к оси ЗО, и неравномерности скорости его движения, которое может быть "ниже", "одинаковое" и "выше" (фиг. 8):

где Fd1 - доплеровская добавка частоты первого промежутка сигнала, Гц;
Fd2 - доплеровская добавка частоты второго промежутка сигнала, Гц.
- отношение длительностей первого и второго временных промежутков сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом отношения длин участков дорог, находящихся в ЗО, и неравномерности скорости движения нарушителя, как "меньше", "равное" и "больше" (фиг. 9):
где t1 - длительность первого промежутка сигнала, сек;
t2 - длительность второго промежутка сигнала, сек.
В теории, когда нарушитель пересекает перекресток дорог с равномерной скоростью, а само СО точно сориентировано относительно перекрестка дорог - отношение частот первого и второго временных промежутков сигнала будет зависеть только от угла под которым нарушитель движется к оси ЗО СО (фиг. 3, 8):
 .
.
На практике, значение рассмотренных отношений определяется не только конкретными геометрическими размерами перекрестка, но также погрешностью измерений СО и неравномерностью скорости движения нарушителя. Неравномерность скорости движения пешего нарушителя по дорожной сети не превышает 1,5 [2]:

где Vmax - верхний предел скорости движения нарушителя;
Vmin - нижний предел скорости движения нарушителя.
При движении нарушителя через место пересечения дорог, пересекая 30, он проходит не более нескольких десятков метров на таком расстоянии неравномерность скорости движения будет значительно меньше указанного предела, т.е. практически равномерной.
С учетом отмеченного, отношение значений доплеровской добавки частоты первого и второго временных промежутков отраженного сигнала μ(Fd1/Fd2) можно представить тремя диапазонами, графически в виде трех трапециевидных функций принадлежности (фиг. 8):
 ,
,

где а, b, с, d - параметры графика функции принадлежности терм-множества (диапазона) "ниже";
d, е, ƒ, g - параметры графика функции принадлежности терм-множества (диапазона) "одинаковое";
g, h, i, j - параметры графика функции принадлежности терм-множества (диапазона) "выше". "
Значения cosα / 5; 0,2 и 1 / 5cosα в формуле 12 - отклонения от средних значений отношения частот первого и второго временных промежутков сигнала (N).
Так, если поступил сигнал, отраженный от нарушителя с двумя различными доплеровскими добавками частоты Fd1 и Fd2, их необходимо разделить друг на друга, полученный результат отложить по оси абсцисс, точка пересечения с одним из графиков укажет принадлежность этого отношения к одному из диапазонов: "выше", "ниже" или "одинаковое", а также степень уверенности вывода μ (0-1) (фиг. 8).
В теории, когда нарушитель пересекает перекресток дорог с равномерной скоростью, само СО точно сориентировано относительно перекрестка дорог - отношение длительностей первого и второго временных промежутков сигнала будет зависеть от длин участков дорог находящихся в ЗО (фиг. 3, 9):
На практике, значение отношение длительностей первого и второго временных промежутков сигнала зависит также от погрешностей измерений СО и неравномерности скорости движения нарушителя (формула 11). Значения отношения μ (t1/t2) можно представить тремя диапазонами, графически в виде трех трапециевидных функций принадлежности:

где а', b', с', d' - параметры графика функции принадлежности терм-множества (диапазона) "меньше";
d', e', ƒ', g' - параметры графика функции принадлежности терм-множества (диапазона) "равное";
g', h', i', j' - параметры графика функции принадлежности терм-множества (диапазона) "больше".
Значения 0,04; 0,2 и 1 в формуле 14 - отклонения от средних значений отношения длительностей первого и второго временного промежутка сигнала (N).
Так, если поступил сигнал, отраженный от нарушителя с двумя различными доплеровскими добавками частоты Fd1 и Fd2 их временные промежутки необходимо разделить друг на друга, полученный результат отложить по оси абсцисс точка пересечения с одним из графиков укажет принадлежность этого отношения к одному из диапазонов: "меньше", "равное" или "больше", а также степень уверенности вывода μ (0-1) (фиг. 9).
В обоих случаях, для формул 12 и 14, параметры графиков функции принадлежности рассчитываются по формуле (фиг. 10):

где М - среднее значение отношения без учета неравномерности скорости движения нарушителя (доплеровских добавок частоты или длительности первого и второго временных промежутков сигнала, определяется по формулам 10, 13);
N - отклонение от среднего значения с учетом неравномерности скорости движения нарушителя;
1,5 - коэффициент неравномерности скорости движения нарушителя.
Откуда:

Цель в предлагаемом способе достигается за счет выделения и анализа расширенного признакового пространства, указывающего на направление движения нарушителя. Так, признаковое пространство включает в себя помимо ранее используемых положительной и отрицательной доплеровской добавки частоты отраженного от нарушителя сигнала еще и принадлежность отношения значений доплеровской добавки частоты первого и второго временных промежутков отраженного сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом углов, под которыми нарушитель движется к оси ЗО, и неравномерности скорости его движения, принадлежности отношения длительностей первого и второго временных промежутков сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом отношения длин участков дорог, находящихся в ЗО и неравномерности скорости движения нарушителя. В предлагаемом способе движение нарушителя в шести направлениях определяется раздельно (фиг. 7).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Развертывание СО с антенным устройством 1, передатчиком 2, приемником 3, схемой 4 обработки сигналов, анализирующим устройством 6 и выходным интерфейсом 8 по разработанной схеме (фиг. 3, 11).
2. Развертывание на местности системы сбора и обработки информации (ССОИ), включающей в себя приемопередатчик сигналов 5, решающее устройство 7 и монитор 9 (фиг. 11).
3. Запись алгоритма определения направления движения нарушителя в решающее устройство 7 ССОИ (фиг. 7).
4. Начало работы СО и ССОИ.
Основной этап начинается попаданием нарушителя в зону обнаружения СО, он включает:
1. Излучение зондирующего сигнала передатчиком 2 через антенное устройство 1 и прием отраженного от нарушителя сигнала приемником 3 (фиг. 11).
2. Регистрацию СО факта начала появления нарушителя в его 30 схемой 4 обработки сигналов (фиг. 11).
3. Началом анализа знака доплеровской добавки частоты отраженного от нарушителя сигнала анализирующим устройством 6 (фиг. 11).
4. Регистрацию изменения значения доплеровской добавки частоты и (или) ее знака анализирующим устройством 6 и фиксацию им длительности первого промежутка сигнала (фиг. 11).
5. Регистрацию изменения значения доплеровской добавки частоты и (или) ее знака анализирующим устройством 6 (фиг. 11).
6. Регистрацию СО факта выхода нарушителя из 30 схемой 4 обработки сигналов и фиксацию им длительности второго промежутка сигнала (фиг. 11).
7. Передача через выходной интерфейс 8 данных об отраженном сигнале на приемо-передатчик 5 ССОИ (длительности первого и второго промежутка сигнала и значений доплеровской добавки частоты и ее знака) (фиг. 11).
8. Анализ решающим устройством 7 принадлежности отношения значений доплеровской добавки частоты первого и второго временных промежутков отраженного сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом углов, под которыми нарушитель движется к оси зоны обнаружения, и неравномерности скорости его движения (фиг. 8).
9. Анализ решающим устройством 7 принадлежности отношения длительностей первого и второго временных промежутков сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом отношения длин участков дорог, находящихся в зоне обнаружения, и неравномерности скорости движения нарушителя (фиг. 9).
10. Определении направления движения нарушителя решающим устройством 7 по комбинации диапазонов отношения доплеровской добавкой частоты временных промежутков сигнала, отношения длительности временных промежутков сигнала и знака доплеровской добавки частоты (фиг. 7).
11. Выведение результата на монитор 9 (фиг. 11).
Сущность изобретения поясняется графическими материалами, где представлены:
- фиг. 1 - таблица основных характеристик современных однопозиционных радиоволновых средств обнаружений с широкой зоной обнаружения, выпускаемых российской промышленностью;
- фиг. 2 - схема развертывания однопозиционного радиоволнового средства обнаружения в известном способе;
- фиг. 3 - схема развертывания однопозиционного радиоволнового средства обнаружения в предлагаемом способе;
- фиг. 4 - схема, показывающая направление вектора радиальной скорости нарушителя при движении его в направлении к и от СО;
- фиг. 5 - таблица соответствия доплеровской добавки частоты в зависимости от фактической скорости пешего нарушителя и угла пересечения оси ЗО СО с дорогой;
- фиг. 6 - таблица соответствия доплеровской добавки частоты в зависимости от фактической скорости нарушителя на транспортном средстве и угла пересечения оси ЗО СО с дорогой;
- фиг. 7 - алгоритм (таблица) определения направления движения нарушителя;
- фиг. 8 - вид графика функций принадлежности (диапазона) отношения значений доплеровской добавки частоты первого и второго временных промежутков отраженного сигнала "ниже", "одинаковое" или "выше" для α>65°;
- фиг. 9 - вид графика функций принадлежности (диапазона) отношения длительностей первого и второго временных промежутков сигнала "меньше", "равное" или "больше";
- фиг. 10 - общий вид графика функции принадлежности (диапазона).
- фиг. 11 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат состоит в повышении точности указания направления движения обнаруженного нарушителя (все шесть возможных направления определяются раздельно) с применением только одного однопозиционного радиоволнового средства обнаружения (фиг. 7).
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
3. Р78.36.026-2012 Рекомендации по использованию технических средств обнаружения, основанных на различных физических принципах, для охраны огражденных территорий и открытых площадок (код: К.5.И.02.2012, шифр: «Территория»), 2012. - 358 с.
4. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КГТИ ФСБ РФ, 2004. - 135 с.
5. Финкельштейн М.И. Основы радиолокации: Учебник. - М.: Советское радио, 1973. - 495 с.
6. Леоненков А.В. Нечеткое моделирование в среде MATLAB и fuzzyTECH / А.В. Леоненков. - СПб.: БХВ - Петербург, 2005. - 736 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДОРОГ | 2016 |
|
RU2622515C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ТРЕХСТОРОННЕЙ РАЗВИЛКИ ДОРОГ | 2016 |
|
RU2620963C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДВУХ ЛЕЖАЩИХ РЯДОМ ДОРОГ | 2016 |
|
RU2621597C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДВУХ ЛЕЖАЩИХ РЯДОМ ДОРОГ | 2016 |
|
RU2634745C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2612327C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| РАДИОВОЛНОВОЙ ДОПЛЕРОВСКИЙ ОБНАРУЖИТЕЛЬ | 2015 |
|
RU2610146C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2617575C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА РАЗВИЛКИ ДОРОГ С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2648210C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2645598C1 |



Изобретение относится к области навигационного приборостроения и может найти применение в системах дистанционного охранного мониторинга местности в случаях применения однопозиционного радиоволнового средства обнаружения (СО) с широкой зоной обнаружения (ЗО) для сигнализационного прикрытия места пересечения трех дорог. Технический результат – повышение точности. Для этого способ заключается в развертывании СО в месте пересечения трех дорог так, чтобы его ЗО пересекала все три дороги и ее ось была смещена относительно места пересечения трех дорог таким образом, чтобы отношение длин участков дорог, находящихся в зоне обнаружения было 1:5:5; выдаче сигнала тревоги СО в случае пересечения его ЗО нарушителем; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; последующем применении алгоритма определения направления движения нарушителя, в котором отраженный сигнал делится на два временных промежутка, отличающихся значением доплеровской добавки частоты и (или) ее знаком; анализируется принадлежность отношения значений доплеровской добавки частоты первого и второго промежутка отраженного сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом углов, под которыми нарушитель движется к оси ЗО, и неравномерности скорости его движения; анализируется принадлежность отношения длительностей первого и второго временных промежутков сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом отношения длин участков дорог, находящихся в ЗО, и неравномерности скорости движения нарушителя. При этом способ включает подготовительный этап с развертыванием по разработанной схеме СО и основной этап, который начинается с момента попадания нарушителя в ЗО СО, в течение которого он обнаруживается и определяется направление его движения. В результате обеспечивается повышение точности указания направления движения обнаруженного нарушителя (все шесть возможных направлений определяются раздельно) с применением только одного СО. 11 ил.
Способ охранного мониторинга места пересечения трех дорог, заключающийся в развертывании однопозиционного радиоволнового средства обнаружения с широкой зоной обнаружения в месте пересечения трех дорог так, чтобы его зона обнаружения пересекала все три дороги; выдаче сигнала тревоги средством обнаружения в случае пересечения его зоны обнаружения нарушителем; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов средства обнаружения в течение всего времени нахождения нарушителя в его зоне обнаружения; последующем применении алгоритма определения направления движения нарушителя по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала с учетом схемы развертывания средства обнаружения, отличающийся тем, что в схеме развертывания средства обнаружения ось его зоны обнаружения смещена относительно места пересечения трех дорог таким образом, чтобы отношение длин участков дорог, находящихся в зоне обнаружения было 1:5:5; в алгоритме определения направления движения нарушителя отраженный сигнал делится на два временных промежутка, отличающихся значением доплеровской добавки частоты и (или) ее знаком; дополнительно анализируется принадлежность отношения значений доплеровской добавки частоты первого и второго временных промежутков отраженного сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом углов, под которыми нарушитель движется к оси зоны обнаружения, и неравномерности скорости его движения; дополнительно анализируется принадлежность отношения длительностей первого и второго временных промежутков сигнала к одному из трех диапазонов, рассчитанных аналитически с учетом отношения длин участков дорог, находящихся в зоне обнаружения, и неравномерности скорости движения нарушителя.
| Коршняков, В.Г | |||
| Сигнализационные средства охраны локальных участков: уч | |||
| пособие / В.Г | |||
| Коршняков - Калининград: КГТИ ФСБ РФ, 2004 | |||
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ ОБРЫВНЫМИ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2011 |
|
RU2485596C2 |
| Ботуз, С.П | |||
| Методы и средства отображения многомерных параметрических зависимостей | |||
| - В кн.: Информационные технологии искусственного интеллекта | |||
| Под ред | |||
| акад | |||
| Л.Н.Лупичёва | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |
| WO 2006097920 A2, 21.09.2006. | |||

