Настоящее изобретение относится к способу и системе пилотирования летательного аппарата с двигательным агрегатом с задним расположением.
Известно, что летательный аппарат, такой как ракета-носитель, может управляться по меньшей мере одним ориентируемым двигательным агрегатом, установленным на заднем конце аппарата. Этот двигательный агрегат расположен таким образом, чтобы создавать тягу, интенсивность и направление которой определяют траекторию полета аппарата.
Также известно, что в передней части такого летательного аппарата обычно расположен блок инерциальных измерений, одной из функций которого является определение ориентации аппарата, т.е. его ориентации относительно инерциальных осей (отсчета), заложенных в блок инерциальных измерений. В частности, исходя из этого, компьютер определяет ориентацию, которая должна быть придана двигательному агрегату с задним расположением таким образом, чтобы создаваемая им тяга позволяла аппарату стабильно двигаться по траектории полета. Эта ориентация придается двигательному агрегату с задним расположением посредством сервоконтура, алгоритм управления которым традиционно задает зависимость между направлением тягового усилия, которое двигательный агрегат должен сообщать аппарату, и ориентацией аппарата, определенной блоком инерциальных измерений.
Оснащенный таким образом летательный аппарат может в реальном времени пилотироваться в полете с возможностью регулирования и стабилизации его траектории независимо от условий полета (атмосферного, орбитального и т.д.).
Тем не менее, поскольку жесткость конструкции аппарата этого типа обычно не является бесконечной, вероятно, что она испытывает колебательные упругие деформации. Эти деформации нарушают алгоритм управления сервоконтуром аппарата вследствие напряженно-деформированных состояний на различных частотах и с различными затуханиями. Кроме того, нарушение алгоритма управления может приводить к дестабилизации аппарата.
С целью стабилизации аппарата в случае таких напряженно-деформированных состояний известно применение фильтрации управления ориентацией двигательного агрегата, которая определяется компьютером в зависимости от предшествующей ориентации аппарата, определенной блоком инерциальных измерений, в результате чего упомянутые напряженно-деформированные состояния ослабляются.
Аналогичным образом, известно применение фильтрации управления ориентацией двигательного агрегата, которая определяется компьютером, с целью, с одной стороны, препятствовать упомянутой ориентации двигательного агрегата, а с другой стороны, деформации, вызванной напряженно-деформированным состоянием на заданной частоте.
Тем не менее, эти известные методы фильтрации неприменимы, когда частоты напряженно-деформированных состояний имеют такой же порядок величины, как и полоса пропускания, предназначенная для пилотирования (например, полоса пропускания, необходимая для обеспечения стабильности аппарата). В частности, когда деформация аппарата имеет форму колебаний с первой частотой в полосе пропускания, необходимой для обеспечения стабильности, пилотирование аппарата, вероятно, невозможно, поскольку при этом требуется одновременно выполнять, с одной стороны, требования управления общим движением аппарата (далее - "жесткая" форма колебаний), а с другой стороны, требования стабильности при напряженно-деформированных состояниях (упругой деформации, поскольку летательный аппарат не является абсолютно жестким).
Соответственно, в основу настоящего изобретения положена задача создания способа пилотирования летательного аппарата с использованием двигательного устройства, которое может быть ориентировано относительно заднего конца аппарата, что позволяет направлять и стабилизировать аппарат независимо от условий полета, в том числе при воздействии на аппарат напряжений, способных упруго деформировать конструкцию аппарата посредством колебаний различных форм.
С этой целью в изобретении предложен способ пилотирования летательного аппарата посредством двигательного устройства, которое может быть ориентировано относительно заднего конца аппарата, включающий определение ориентации аппарата с помощью сервоконтура и корректировку ориентации двигательного устройства в зависимости от результатов определения ориентации таким образом, чтобы стабилизировать аппарат на траектории его полета, отличающийся тем, что ориентацию аппарата определяют вблизи его заднего конца.
Этим способом согласно изобретению управляют двигательным устройством и определяют ориентацию аппарата в точках в непосредственной близости от двигательного устройства. В результате, определяемая таким способом ориентация по меньшей мере преимущественно соответствует ориентации, которая должна быть придано аппарату и, соответственно, может непосредственно использоваться для управления двигательным устройством без необходимости адаптации ориентации, определяемой между передним и задним концами аппарата, что чревато нарушением алгоритма управления аппаратом.
Соответственно, путем тщательного размещения средства определения ориентации более эффективно контролируется нарушение (вызванное напряженно-деформированными состояниями) алгоритма управления аппаратом.
Кроме того, следует отметить, что изобретение, в частности, обеспечивает определенную степень свободы, теряемую при стабилизации аппарата, и широкий диапазон уровня его жесткости. Тем самым могут быть ослаблены конструктивные ограничения, более точно, ограничения по жесткости аппарата и дополнительно упрощено его изготовление.
Если в соответствии с изобретением ориентация аппарата может определяться на его заднем конце, следует учесть, что с учетом упругой деформации конструкции аппарата еще более предпочтительно определять ориентацию максимально близко к точке, вокруг которой шарнирно установлено двигательное устройство.
С целью улучшения стабильности аппарата при корректировке ориентации двигательного устройства учитываются угловые и линейные деформации на заднем конце аппарата и в месте определения ориентации.
В этом случае с целью естественного контроля напряженно-деформированных состояний место определения ориентации определяется таким образом, чтобы независимо от деформации аппарата угловая деформация в месте определения ориентации и линейная деформация на заднем конце аппарата имели противоположные знаки.
В качестве альтернативы, когда при заданной деформации аппарата угловая деформация в месте определения ориентации и линейная деформация на заднем конце аппарата имеют одинаковый знак, ориентация двигательного устройства корректируется с учетом такого знака.
Определение ориентации и корректировка ориентации двигательного устройства предпочтительно осуществляются последовательно в течение очень короткого периода времени. Тем самым гарантируется, что двигательного устройства угловая деформация в месте определения ориентации и линейная деформация на заднем конце аппарата не изменят знаки за время между определением ориентации и корректировкой ориентации.
В изобретении дополнительно предложена система пилотирования летательного аппарата, содержащая двигательное устройство, которое может быть ориентировано относительно заднего конца аппарата, средство определения ориентации аппарата, а также средство корректировки ориентации двигательного устройства в зависимости от результата определения ориентации таким образом, чтобы направлять аппарат по стабильной траектории, отличающаяся тем, что средство определения ориентации летательного аппарата расположено вблизи его заднего конца.
На прилагаемых чертежах ясно проиллюстрировано, как может быть реализовано изобретение. Одинаковые элементы обозначены одинаковыми позициями на чертежах.
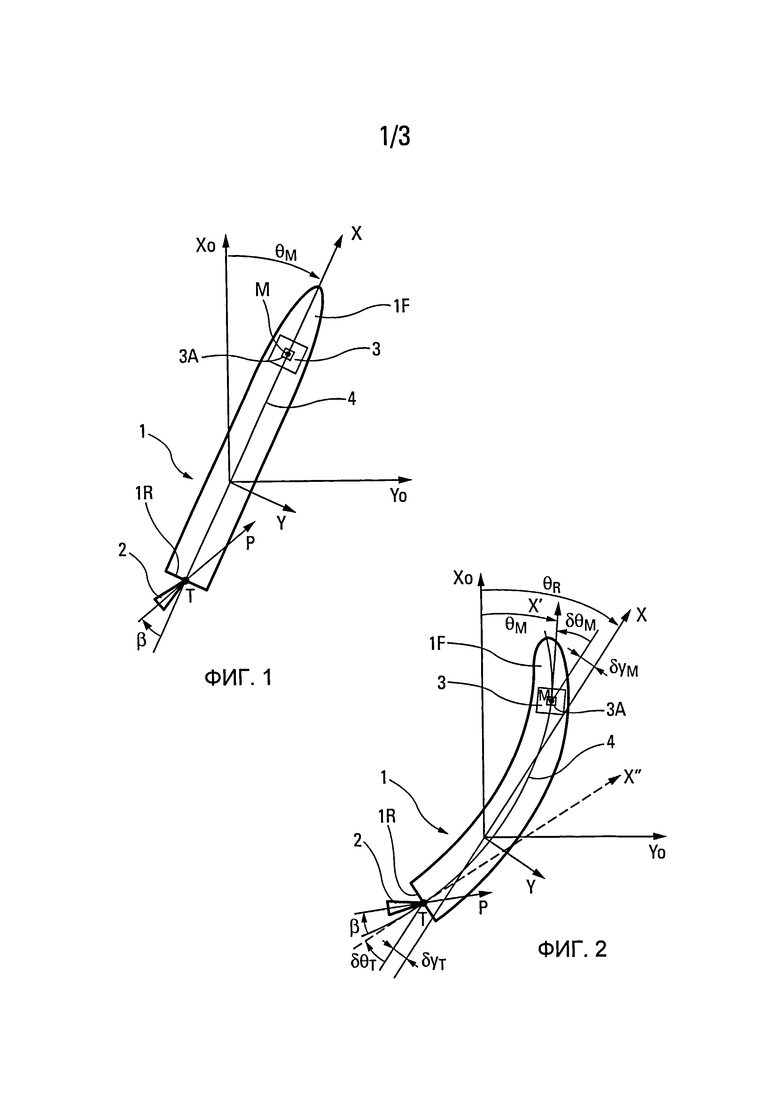
На фиг.1 показана известная система пилотирования летательного аппарата в нейтральной к тяге осевой плоскости аппарата.
На фиг.2 показана проиллюстрированная на фиг.1 известная система пилотирования в ситуации, когда летательный аппарат испытывает колебательную упругую деформацию (сила которой показана преувеличенной на фиг.2).
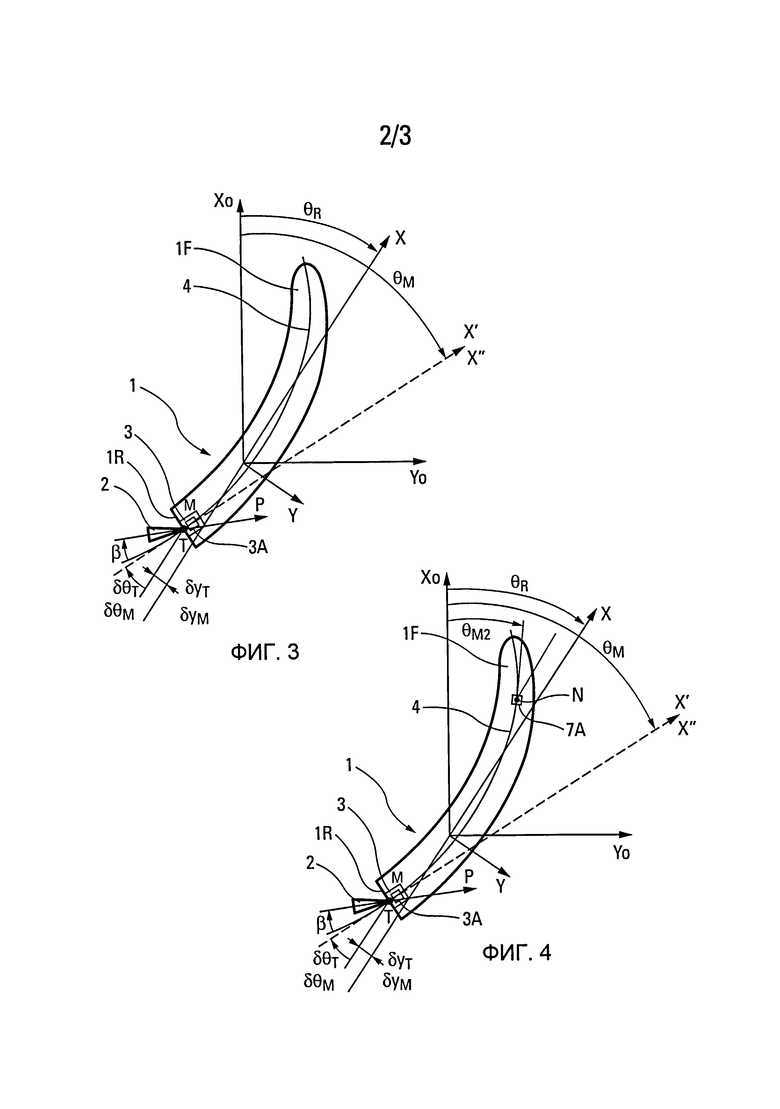
На фиг.3 показана система пилотирования согласно настоящему изобретению в такой же ситуации, которая проиллюстрирована на фиг.2.
На фиг.4 показан вид, аналогичный виду на фиг.3, иллюстрирующий одну из разновидностей системы пилотирования согласно изобретению.
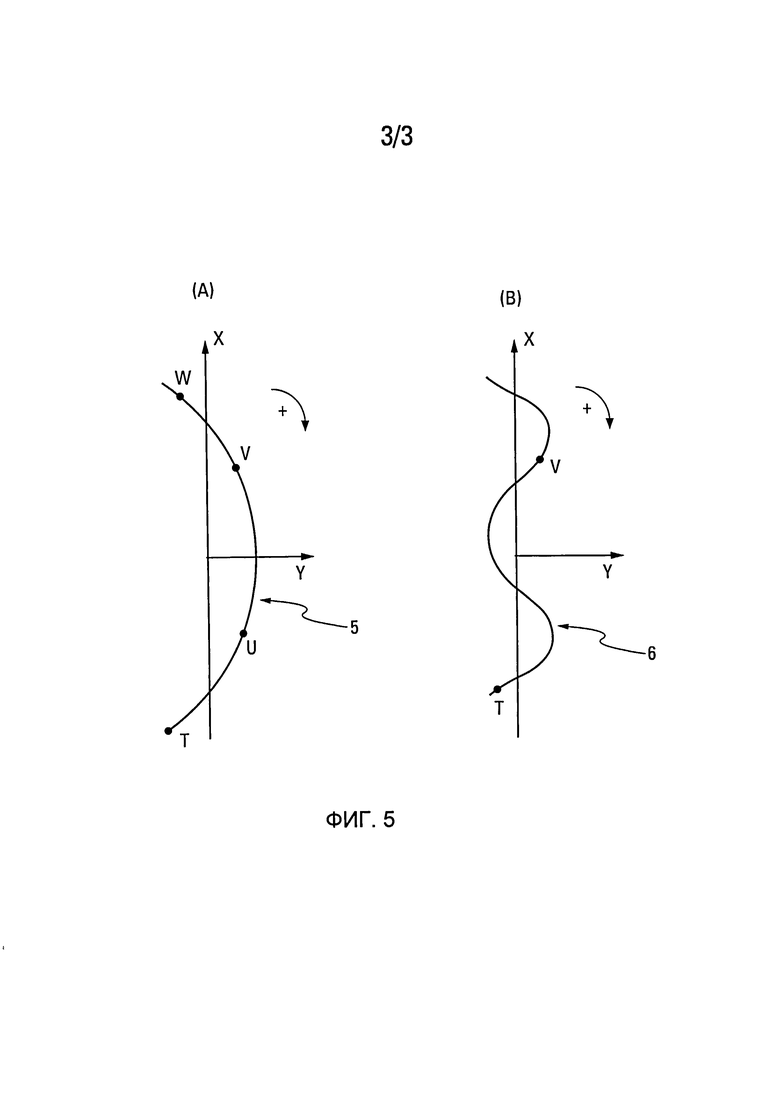
На фиг.5 показаны напряженно-деформированные состояния аппарата.
Показанный на фиг.1 летательный аппарат 1 известного типа, например ракета-носитель, оснащен двигательным устройством 2, рассчитанным на то, чтобы задавать направление тяги Р на заднем конце 1R аппарата. Это двигательное устройство 2 может быть шарнирно установлено вокруг точки Т сочленения на конце 1R аппарата таким образом, что направление тяги Р может быть задано вокруг точки Т сочленения. На фиг.1 показано, что направление тяги ориентировано под углом β относительно продольной оси X аппарата. Направление аппарата 1 по траектории (не показанной) достигается известным способом путем корректировки угла β относительно инерциальных осей Xo и Yo.
Управление траекторией аппарата 1 состоит в ориентации продольной оси Х аппарата 1 в желаемом направлении относительно инерциальных осей Хо и Yo путем воздействия на регулировку угла β.
Для управления тягой в зависимости от желаемой траектории полета необходимо в реальном времени определять положение и ориентацию аппарата 1. С этой целью аппарат 1 известным способом оснащен блоком 3 инерциальных измерений, находящимся в точке М в передней части 1F аппарата. Этот блок 3 регистрирует при запуске аппарата инерциальные осей Хо и Yo, которые служат опорными осями для блока 3. После этого в процессе движения аппарата 1 блок 3 с помощью измерительного средства 3А определяет ориентацию θM аппарата (заданную осями Х и Y аппарата в блоке 3) относительно инерциальных осей Хо и Yo, на основании чего компьютер вычисляет отклонение двигательного устройства 2 (которое задает ориентацию β тяги, прилагаемой к аппарату) таким образом, чтобы аппарат следовал по желаемой траектории полета, которая, в частности, должна являться стабильной.
Предполагается, что показанный на фиг.1 аппарат 1 имеет бесконечную жесткость, и его нейтральная ось 4 совпадает с продольной осью X. Таким образом, общий алгоритм управления, применимый к двигательному устройству 2, обычно формулируется в виде следующего уравнения (в котором θ означает разность между результатом определения ориентации θM и целевой ориентацией θR)

Тем не менее, как показано в преувеличенном виде на фиг.2, конструкция аппарата 1 не является бесконечно жесткой, она может испытывать упругую деформацию под действием колебательных напряжений. Эта деформация имеет формы колебаний с различными частотами, две их которых проиллюстрированы на фиг.5 (форма колебаний первого порядка на фиг.5А и форма колебаний более высокого порядка на фиг.5Б). Как показано на фиг.2, поскольку аппарат 1 (и его нейтральная ось 4) имеют правильную кривизну, эта форма колебаний первого порядка является основной формой деформации.
Измерения, осуществляемые измерительным средством 3А блока инерциальных измерений 3, позволяют определять ориентацию θM аппарата в данном положении, которая соответствует угловому рассогласованию между осью X’ аппарата (видимой осью аппарата в точке М измерений) и инерциальной осью Хо. На основании этих данных компьютер вычисляет ориентацию β, которая должна быть придана двигательному устройству 2 относительно оси X’’ аппарата (видимой оси аппарата в точке Т сочленения). Тем не менее, вследствие деформации аппарата видимая ось X’ (аппарата в точке М измерений измерительным средством 3А блока 3 инерциальных измерений) и видимая ось X’’ (аппарата в точке Т сочленения) не параллельны друг другу или нейтральной оси 4 аппарата.
В результате возникает:
угловая деформация δθM аппарата 1 в точке М измерений относительно нейтральной оси 4 аппарата,
линейная деформация δyM аппарата 1 в точке М измерений относительно нейтральной оси 4 аппарата,
угловая деформация δθT аппарата 1 в точке Т сочленения тяги относительно нейтральной оси 4 аппарата, и
линейная деформация δyT аппарата 1 в точке Т сочленения относительно нейтральной оси 4 аппарата.
Каждая форма колебаний деформации имеет импульс ω и коэффициент ξ затухания. Соответственно, влияние деформации конструкции аппарата при форме колебаний энного порядка может быть представлено в виде следующей системы уравнений:




При этом q является решением следующего уравнения:

путем решения которого обеспечивается новый алгоритм управления:

По сравнению с традиционным алгоритмом управления согласно Уравнению 1 этот алгоритм управления содержит дополнительный компонент 
Чтобы стабилизировать каждую форму колебаний упругой деформации, измерительное средство 3А помещают вблизи точки Т, вокруг которой шарнирно установлено двигательное устройство 2. Эта ситуация проиллюстрирована на фиг.3.
Следует отметить, что усовершенствование, проиллюстрированное в этом случае, является моделью рассогласования, содержащей принятые неправильные употребления системы обозначений (θ записывается вместе Δθ, θM вместе с ΔθM, Δβ вместе с β).
Соответственно, в таком случае характеристики ориентации аппарата 1 определяются в первую очередь следующими четырьмя уравнениями:




в которых:
θ означает ориентацию аппарата 1,
β означает ориентацию тяги Р,
θM означает ориентацию, фактически определенную измерительным средством 3А блока 3 инерциальных измерений,
h’ означает форму колебаний угловой деформации в точке М измерений,
h означает форму колебаний линейной деформации в точке Т сочленения,
q означает форму колебаний деформации (в обобщенных координатах),
Kθ означает устойчивость ориентации аппарата при разомкнутом контуре,
Kβ означает эффективность отклонения двигательного устройства 2 с точки зрения углового ускорения,
ξ означает затухание формы колебаний деформации,
ω означает импульс формы колебаний деформации,
Р означает тягу,
λθ означает коэффициент усиления ориентации системы пилотирования,
λθ’ означает коэффициент усиления скорости ориентации системы пилотирования.
Динамические характеристики, устанавливаемые замкнутым сервоконтуром, приводят к следующей корректировке системы пилотирования:


где
ωBF означает импульс жесткой формы колебаний в замкнутом контуре и
ξBF означает затухание жесткой формы колебаний в замкнутом контуре.
Без ограничения объема изобретения предполагается, что аппарат не обладает устойчивостью (т.е. Kθ=0) и форма колебаний не затухает (т.е. ξ=0). Следует отметить, что результат, аналогичный следующему результату, может быть получен без этих допущений при условии, что устойчивость Kθ изменяет лишь величину коэффициентов усиления системы пилотирования с целью достижения динамических характеристик (ωBF; ξBF), устанавливаемых замкнутым сервоконтуром. Кроме того, следует, что ненулевое затухание форм колебаний (то есть положительное, поскольку механическая система является рассеивающей) оказывает благоприятное воздействие на стабильность аппарата.
Согласно упомянутым допущениям и при условии обозначения переменной Лапласа как s, знаменатель передаточной функции замкнутого контура может быть представлен в виде следующего многочлена:

со следующим параметром ν:

Система уравнений 8-11 (и тем самым соответствующая форма колебаний деформации) является стабильной только, если корни многочленного уравнения 14 являются отрицательными действительными частями.
Для определения знака этих корней может применяться критерий Рауса-Гурвица, который позволяет определять, что корни многочленного уравнения 14 являются отрицательными действительными частями только, если следующие пять коэффициентов являются положительными:





Из членов приведенных коэффициентов ν является единственным параметром, знак которого может являться отрицательным. Соответственно, согласно критерию Рауса-Гурвица система является стабильной, если ν имеет положительную величину, т.е. система является стабильной, если произведение h.h’ имеет отрицательную величину. Из этого можно заключить, что если угловая деформация h’ в точке М измерений и линейная деформация h в точке Т сочленения имеют противоположные знаки, то независимо от корректировки замкнутого корпуса (ωBF; ξBF) системы пилотирования рассматриваемая форма колебаний деформации является стабильной.
Эта ситуация проиллюстрирована на фиг.5. На фиг.5А кривой 5 обозначена нейтральная ось аппарата 1 относительно продольной оси X, когда аппарат испытывает упругую деформацию только с формой колебаний первого порядка.
Точки Т, U, V и W приведены в качестве примеров возможных положений точки М измерений. Соответственно, ясно, что:
угловая деформация h’ и линейная деформация h в точке Т сочленения определенно имеют противоположные знаки (h’ - положительный, h - отрицательный),
угловая деформация h’ и линейная деформация h в точке U не имеют противоположных знаков (h’ и h - положительные),
угловая деформация h’ и линейная деформация h в точке V определенно имеют противоположные знаки (h’ - отрицательный, h - положительный), и
угловая деформация h’ и линейная деформация h в точке W не имеют противоположных знаков (h’ и h - отрицательные).
Соответственно, стабильность может обеспечиваться только, если определение ориентации осуществляется в точке Т или в точке V.
На фиг.5Б кривой 6 обозначена нейтральная ось аппарата 1 относительно оси X, когда аппарат испытывает упругую деформацию с формой колебаний более высокого порядка, чем форма колебаний первого порядка. В этом случае можно видеть, что:
угловая деформация h’ и линейная деформация h в точке Т всегда имеют противоположные знаки (h’ - положительный, h - отрицательный),
угловая деформация h’ и линейная деформация h в точке V больше не имеют противоположных знаков (h’ - отрицательный, h - положительный).
Соответственно, точка Т позволяет обеспечивать стабильность при формах колебаний этих двух порядков. Следует отметить, что аналогичный аргумент при формах колебаний других порядков приносит такой же результат. Таким образом, поскольку упругая деформация, испытываемая конструкцией аппарата 1, представляет собой сочетание нескольких форм колебаний 5А и 5Б, точка Т является лучшим местом для определения ориентации θM аппарата 1 таким образом, чтобы обеспечивать его стабильность при деформации всех порядков.
Тем не менее, следует учесть, что для обеспечения требуемой стабильности при деформации всех порядков точка М необязательно должна идеально совпадать с точкой Т при условии, что точка М находится по меньшей мере приблизительно вблизи заднего конца 1R аппарата 1.
Также следует учесть, что за счет стабилизации при деформации всех порядков путем простого изменения положения средства 3А определения ориентации θM аппарата 1 стабилизация происходит полностью естественным образом, т.е. без необходимости применения дополнительных средств фильтрации ориентации β с обязательным учетом погрешностей в результате остаточной деформации.
Как показано на фиг.4, помимо первого измерительного средства 3А блока 3 инерциальных измерений аппарат 1 содержит второе средство 7А определения ориентации аппарата. Это второе измерительное средство 7А, находящееся в точке N в передней части 1F аппарата (напротив заднего конца 1R аппарата), как и первое измерительное средство 3А, позволяет определять ориентацию θM2 аппарата 1 в точке N и затем выводить из нее отклонение β двигательного устройства 2 таким образом, чтобы аппарат 1 следовал по желаемой стабильной траектории (не показанной).
В этом варианте осуществления изобретения измерительные средства 3А и 7А способны действовать поочередно в зависимости от предусмотренных условий полета. В действительности, влияние напряженно-деформированных состояний обычно является значительным только в условиях атмосферного полета. Измерительное средство 3А блока 3 инерциальных измерений на заднем конце 1R аппарата может использоваться только в условиях атмосферного полета, длительность которого обычно является небольшой (две или три минуты). На протяжении остального полета, в частности космического полета и/или ориентировки в полете, предпочтительно используется второе измерительное средство 7А.
С этой целью в качестве второго измерительного средства 7А может использоваться высокоточный датчик, который позволяет с высокой точностью определять ориентацию аппарата и тем самым выполнять требования точности ориентировки. Что касается измерительного средства 3А блока 3 инерциальных измерений, он может представлять собой не такой точный датчик, как второе измерительное средство 7А.
При описании изобретения, в частности, предполагалось, что между моментом определения ориентации θM и моментом осуществления отклонения β под управлением системы пилотирования (возможно, с участием пилота) отсутствует задержка. Тем не менее, следует отметить, что значительная задержка между этими двумя моментами может приводить к изменению знака h и h’. С точки зрения пилотирования эта ситуация аналогична тому, что h и h’ имели бы одинаковый знак, что не позволяло бы обеспечивать естественную стабильность. Тем не менее, следует учесть, что основные напряженно-деформированные состояния, которые, вероятно, возникают на частотах в полосе пропускания, используемой для пилотирования, являются формами низкочастотных колебаний и, соответственно, не обладают высокой чувствительностью к порядку величины потенциальной задержки между этими двумя моментами в традиционной системе пилотирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки на приборную панель летательного аппарата резервного блока ориентации пилотажно-навигационного комплекса | 2023 |
|
RU2822083C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| Интегрированная система резервных приборов | 2019 |
|
RU2728731C1 |
| Интегрированная система резервных приборов | 2020 |
|
RU2780634C2 |
| Интегрированная система резервных приборов | 2020 |
|
RU2790217C2 |
| Способ динамической юстировки систем координат вертолета на основе их векторного согласования | 2023 |
|
RU2795354C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СИСТЕМА ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ПО МЕНЬШЕЙ МЕРЕ, ВО ВРЕМЯ АВТОНОМНОГО ЗАХОДА НА ПОСАДКУ | 2007 |
|
RU2384889C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЕКТОРА УСКОРЕНИЯ | 1995 |
|
RU2079143C1 |
Группа изобретений относится к управлению движением нежёсткого летательного аппарата (1) с помощью двигателя (2). Пилотирование осуществляется системой управления с измерительным средством (3А), расположенным вблизи заднего конца (1R) аппарата. Средство (3А) определяет ориентацию (θM) аппарата, а также измеряет угловую (δθM) и линейную (δyM) деформации аппарата в точке (М) вблизи заднего конца. С учётом последних уточняется ориентация аппарата и корректируется ориентация (β) двигателя (2). Техническим результатом является повышение точности управления, с ослаблением требований к жёсткости конструкции аппарата. 2 н. и 2 з.п. ф-лы, 5 ил.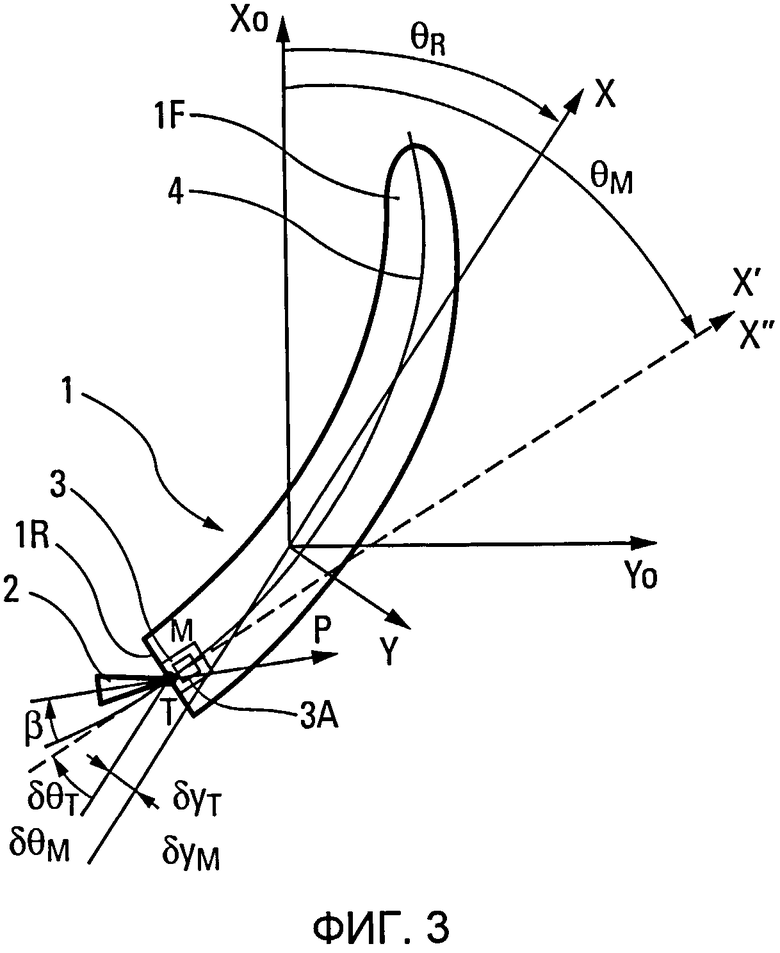
1. Способ пилотирования аппарата (1) посредством двигательного устройства (2), которое выполнено с возможностью ориентирования относительно точки (Т), расположенной на заднем конце (1R) аппарата (1), включающий использование сервоконтура для определения ориентации (θM) аппарата (1) и корректировки ориентации (β) двигательного устройства (2) в зависимости от результатов определения ориентации (θM) таким образом, чтобы стабилизировать аппарат (1) на траектории его полета, отличающийся тем, что ориентацию (θM) аппарата (1) определяют вблизи его заднего конца (1R), при этом при корректировке ориентации (β) двигательного устройства (2) учитывают угловую деформацию (δθT) и линейную деформацию (δyT) в точке (Т), расположенной на заднем конце (1R) аппарата (1), а также угловую деформацию (δθM) и линейную деформацию (δyM) в точке (М) определения ориентации (θM) аппарата (1).
2. Способ по п.1, отличающийся тем, что ориентацию определяют в точке (М) определения ориентации (θM) аппарата (1) таким образом, чтобы независимо от деформации аппарата угловая деформация (δθM) в точке (М) определения ориентации и линейная деформация (δyT) на заднем конце (1R) аппарата имели противоположные знаки относительно нейтральной оси (4) аппарата.
3. Способ по п.1, отличающийся тем, что если при заданной деформации аппарата (1) угловая деформация (δθM) в точке (М) определения ориентации и линейная деформация (δyT) на заднем конце (1R) аппарата имеют одинаковый знак относительно нейтральной оси (4) аппарата, то ориентацию (β) двигательного устройства (2) корректируют с учетом знака.
4. Система пилотирования аппарата (1), содержащая двигательное устройство (2) аппарата (1), выполненное с возможностью ориентирования относительно точки (Т), расположенной на заднем конце (1R) аппарата (1), средство (3А) определения ориентации (θM) аппарата и средство корректировки ориентации (β) двигательного устройства (2), учитывающее ориентацию (θM) аппарата (1), для стабилизации аппарата (1) на траектории его полета, отличающаяся тем, что измерительное средство (3А) расположено вблизи заднего конца (1R) аппарата (1), причем измерительное средство (3А) предназначено для измерения угловой деформации (δθM) и линейной деформации (δyM) аппарата (1), используемых при определении ориентации (θM) аппарата.
| В.П.ПЕТРОВ, А.А.СОЧИВКО | |||
| Управление ракетами | |||
| Воениздат | |||
| М., 1963, с.44-45 (рис.23), 85-88 (рис.51) | |||
| БАЛЛИСТИКА И НАВИГАЦИЯ РАКЕТ | |||
| Под ред | |||
| проф | |||
| А.А.Дмитриевского., М., Машиностроение | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| РЕГИСТРИРУЮЩИЙ МАНОМЕТРИЧЕСКИЙ ПРИБОР | 0 |
|
SU352161A1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2183817C1 |
| US 2849955 A, 02.09.1958; фиг.1-2, кол.2-3. | |||

