Настоящее изобретение касается системы пилотирования летательного аппарата, предназначенной, по меньшей мере, для пилотирования летательного аппарата во время автономного захода с целью осуществления посадки, в частности, в области военной авиации.
Автономный заход на посадку должен обеспечивать полет летательного аппарата без поддержки со стороны наземных навигационных средств в метеорологических условиях полета по приборам типа IMC (“Instrument Meteorological Conditions” на английском языке) до высоты принятия решения, например, 200 футов (примерно 60 метров), которая соответствует высоте принятия решения для точного захода на посадку типа ILS (“Instrument Landing System” на английском языке, то есть система посадки по приборам). Во время такого автономного захода на посадку летательным аппаратом используются исключительно бортовые средства позиционирования, в частности, спутниковая система определения положения, например, типа GPS (“Global Positioning System” на английском языке), инерциальный блок и барометрические датчики. Заход на посадку можно также осуществлять без участия диспетчера воздушного пространства. На упомянутой высоте принятия решения экипаж летательного аппарата должен визуально наблюдать полосу. Если это так, он завершает посадку в визуальном режиме при помощи ручного управления. А если на этой высоте принятия решения экипаж не видит полосу, он должен осуществить уход на второй круг для подъема летательного аппарата на заранее определенную безопасную высоту. Траектория захода на посадку, используемая для осуществления такого автономного захода, разработана заранее до полета и проложена на бумажной карте, которая находится в распоряжении экипажа во время полета. Для этого предварительно производят анализ конфигурации местности вокруг посадочной полосы и определяют запасы по отношению к препятствиям. Эта траектория захода на посадку сохраняется также в базе данных системы пилотирования летательного аппарата.
Из документа FR-2852686 известна система пилотирования летательного аппарата, предназначенная для пилотирования летательного аппарата во время неточного захода на посадку. Эту систему пилотирования в основном используют в области гражданской авиации. Такая система обычного пилотирования, которая относится к неточному заходу на посадку, представляет основную задачу, являющуюся общей и для автономного захода, как он рассматривается в рамках настоящего изобретения, то есть упомянутая система пилотирования должна быть автономной по отношению к наземным средствам навигации и должна быть способной выполнить заход на посадку в любом месте земного шара.
Такая система обычного пилотирования, предназначенная для неточного захода на посадку, как правило, содержит:
- систему управления полетом типа FMS (“Flight Management System” на английском языке), которая определяет действительное положение летательного аппарата, причем:
в номинальном случае осуществляет гибридизацию информации GPS (“Global Positioning System” на английском языке) от многорежимного посадочного радиоприемного устройства типа MMR (“Multi Mode Receiver” на английском языке) с инерциальной информацией, поступающих от инерциального блока отсчета; и
в сложных условиях осуществляет гибридизацию инерциальной информации с радионавигационнрй информацией;
- многорежимное посадочное радиоприемное устройство типа MMR, которое принимает, в частности, от упомянутой системы управления полетом действительное положение летательного аппарата и информацию, позволяющую охарактеризовать виртуальную линию захода на посадку, и которое на основании этой информации определяет боковые и вертикальные угловые отклонения между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на упомянутой виртуальной линии захода на посадку;
- бортовое вычислительное устройство наведения типа FG (“Flight Guidance” на английском языке), которое на основании угловых отклонений, получаемых от упомянутого многорежимного посадочного радиоприемного устройства, и на основании расстояния по отношению к оси посадочной полосы вычисляет линейные отклонения и которое использует эти линейные отклонения для вычисления заданных значений наведения летательного аппарата при помощи, по меньшей мере, одного правила обычного пилотирования; и
- по меньшей мере, одно устройство помощи в пилотировании, например, автопилот или командный пилотажный прибор, которое обеспечивает наведение летательного аппарата до посадки в соответствии с упомянутыми заданными значениями полета, причем либо автоматически (автопилот), либо вручную (командный пилотажный прибор).
Вместе с тем, следует отметить, что задачи автономного захода на посадку, в частности, в области военной авиации являются более масштабными, чем задачи неточного захода на посадку вышеуказанного типа в гражданской авиации. В частности, предусмотренные высоты принятия решения составляют минимум 200 футов (примерно 60 метров) для автономного захода, тогда как она составляет минимум 250 футов (примерно 75 метров) для неточного захода на посадку. Следовательно, конус безопасности, в котором должен оставаться летательный аппарат для осуществления захода на посадку, является меньшим при автономном заходе, чем при неточном заходе на посадку. Кроме того, при автономном заходе на посадку отсутствие воздушного диспетчера исключает средство контроля по сравнению с ситуацией во время неточного захода на посадку в гражданской авиации.
Также система обычного пилотирования вышеуказанного типа, которая вполне подходит для пилотирования летательного аппарата во время неточного захода на посадку, не позволяет гарантировать:
- ни сохранение характеристик, требуемых для автономного захода на посадку, при этом наиболее важными характеристиками являются достоверность и точность вертикального положения летательного аппарата, а также гибкость автопилота, позволяющая улавливать сегменты незначительной длины и точно удерживать слабые и сильные наклоны;
- ни соблюдение критического характера некоторых параметров (в частности, виртуальной линии захода на посадку, по которой будут вести летательный аппарат, а также положения в трех измерениях упомянутого летательного аппарата), используемых системой пилотирования.
Задачей настоящего изобретения является устранение этих недостатков. Изобретением предлагается система пилотирования, которая позволяет осуществлять автономный заход на посадку вышеуказанного типа, обеспечивая одновременно сохранение требуемых характеристик и соблюдение критического характера некоторых используемых параметров.
В этой связи согласно изобретению упомянутая система пилотирования, содержащая, по меньшей мере:
- источники информации, которые выдают, по меньшей мере, указание положения, связанное с действительным положением в трех измерениях летательного аппарата, и информацию, позволяющую охарактеризовать виртуальную линию захода на посадку; и
- средства обработки, которые обрабатывают информацию, поступающую от упомянутых источников информации, которые выполнены с возможностью определения отклонений между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на упомянутой виртуальной линии захода на посадку, и которые используют результаты этих обработок,
отличается тем, что упомянутые средства обработки входят в состав бортового вычислительного устройства наведения, которое содержит:
- первое средство вычисления для непосредственного вычисления, при помощи упомянутого указания положения и упомянутой информации, характеризующей виртуальную линию захода на посадку, линейных (или метрических) отклонений между действительным положением летательного аппарата и упомянутой виртуальной линией захода на посадку;
- второе средство вычисления для непосредственного вычисления, при помощи упомянутого указания положения и упомянутой информации, характеризующей виртуальную линию захода на посадку, боковых и вертикальных угловых отклонений между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на упомянутой виртуальной линии захода на посадку; и
- третье средство вычисления для вычисления при помощи линейных отклонений, вычисленных упомянутым первым средством вычисления, заданных значений пилотирования летательного аппарата.
Таким образом, благодаря настоящему изобретению, система пилотирования не содержит многорежимное посадочное радиоприемное устройство в отличие от вышеуказанной системы обычного пилотирования, а бортовое вычислительное устройство наведения непосредственно вычисляет на основании указания положения и информации, характеризующей виртуальную линию захода на посадку, линейные отклонения, которые используются для вычисления заданных значений пилотирования. Это позволяет избежать преобразований угловых отклонений в линейные отклонения, которые производятся в вышеуказанной системе обычного пилотирования. Система пилотирования в соответствии с настоящим изобретением позволяет также повысить гибкость используемого средства помощи в пилотировании, в частности автопилота.
Кроме того, факт осуществления вычисления линейных отклонений и вычисления заданных значений наведения в одном и том же бортовом вычислительном устройстве наведения позволяет сократить латентные периоды.
Следовательно, благодаря системе пилотирования в соответствии с настоящим изобретением наведение оптимизируют таким образом, чтобы иметь возможность производить полет с использованием одних и тех же правил ведения полета на слабых наклонах и сильных наклонах и улавливать относительно короткие линии захода на посадку.
Кроме того, поскольку система пилотирования в соответствии с настоящим изобретением не содержит многорежимное посадочное радиоприемное устройство (в отличие от вышеуказанной известной системы обычного пилотирования), она имеет более простую архитектуру.
Кроме того, предпочтительно упомянутые источники информации содержат:
- вычислительное устройство управления полетом, которое связано с базой данных, содержащей, по меньшей мере, упомянутую информацию, позволяющую характеризовать упомянутую виртуальную линию захода на посадку; и/или
- систему позиционирования, позволяющую определять действительное положение в трех измерениях летательного аппарата только при помощи бортовых средств.
В частном варианте выполнения система пилотирования в соответствии с настоящим изобретением дополнительно содержит, по меньшей мере, одно средство помощи в пилотировании, например, автопилот или командный пилотажный прибор, которое соединено с упомянутым бортовым вычислительным устройством наведения и которое использует упомянутые заданные значения наведения для помощи в наведении самолета.
Кроме того, упомянутая система пилотирования дополнительно содержит вспомогательные средства, которые соединены с упомянутым бортовым вычислительным устройством наведения и которые используют упомянутые боковые и вертикальные угловые отклонения, а именно, в частности, систему контроля и отображения типа CDS (“Control and Display System” на английском языке), которая отображает угловые отклонения на, по меньшей мере, одном экране в кабине экипажа или система полетного контроля типа FWS (“Flight Warning System” на английском языке), которая использует упомянутые угловые отклонения для осуществления контроля.
Настоящее изобретение будет более очевидно из нижеследующего описания со ссылками на чертеж. На чертеже показана структурная схема системы пилотирования в соответствии с настоящим изобретением.
Схематично показанная на чертеже система 1 в соответствии с настоящим изобретением предназначена для пилотирования летательного аппарата, в частности военного транспортного самолета. В частности, ее задачей является, по меньшей мере, пилотирование летательного аппарата во время автономного захода (то есть в отсутствие информации, позволяющей осуществить обычный точный заход на посадку по приборам) с целью осуществления посадки на посадочной полосе (не показана).
Упомянутая система 1 пилотирования, установленная на борту упомянутого летательного аппарата (не показан), содержит:
- источники 2 информации, подробнее описанные ниже, которые выдают, по меньшей мере, одно указание положения, связанное с действительным положением в трех измерениях летательного аппарата, а также информацию, позволяющую характеризовать виртуальную линию захода, для захода на посадочную полосу. Разумеется, эта информация, рассматриваемая для автономного захода на посадку в рамках настоящего изобретения, не содержит данных, поступающих от наземных станций наведения, как в случае, например, точного захода на посадку по приборам; и
- средства 3 обработки, которые принимают вышеуказанную информацию от источников 2 информации, которые выполнены с возможностью определять отклонения между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на упомянутой виртуальной линии захода на посадку, и которые используют результаты этих обработок, что будет пояснено ниже.
В частном варианте выполнения упомянутые источники 2 информации содержат:
- вычислительное устройство 4 управления полетом типа FMS (“Flight Management System” на английском языке), которое соединено:
через соединение 5 с базой данных 6, которая содержит, по меньшей мере, упомянутую информацию, позволяющую характеризовать упомянутую виртуальную линию захода на посадку; и
через соединение 7 с упомянутыми средствами 3; и
- систему 8 позиционирования, которая соединена через соединение 9 с упомянутыми средствами 3 и которая выполнена с возможностью определения действительного текущего положения в трех измерениях (то есть по широте, долготе и высоте) летательного аппарата, причем только при помощи бортовых средств, которые будут уточнены ниже.
Согласно изобретению упомянутые средства 3 обработки входят в состав бортового вычислительного устройства 10 наведения типа FG (“Flight Guidance” на английском языке), которое содержит:
- средство 11 вычисления, которое соединено через соединение 7 с упомянутой системой 4 управления полетом и через соединение 9 с упомянутой системой 8 позиционирования, которое принимает упомянутое указание положения от упомянутой системы 8 позиционирования и информацию, характеризующую упомянутую виртуальную линию захода на посадку, от упомянутой системы 4 управления полетом (которая извлекает эту информацию из базы данных 6), и которое вычисляет непосредственно на основании всей этой информации линейные (или метрические) отклонения при помощи способа, уточненного ниже. Эти линейные отклонения представляют собой перпендикулярные линейные расстояния (выраженные, например, в метрах) между действительным положением летательного аппарата и виртуальной линией захода на посадку, при этом первое расстояние вычисляют в горизонтальной плоскости, а второе расстояние вычисляют в вертикальной плоскости;
- средство 12 вычисления, которое связано с упомянутыми соединениями 7 и 9 и которое на основании вышеуказанной информации вычисляет обычным способом боковые и вертикальные угловые отклонения между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на упомянутой виртуальной линии захода на посадку; и
- средство 13 вычисления, которое соединено через соединение 14 с упомянутым средством 11 вычисления и которое выполнено с возможностью вычисления непосредственно на основании линейных отклонений, полученных от упомянутого средства 11 вычисления, заданных значений пилотирования, при этом вычисленные таким образом заданные значения пилотирования могут быть переданы через соединение 15 в средства 16 помощи в пилотировании.
Упомянутые средства 16 используют заданные значения пилотирования, полученные от упомянутого бортового вычислительного устройства 10 наведения для обеспечения наведения летательного аппарата до его приземления, либо непосредственно (упомянутые средства 16 могут содержать для этого обычный автопилот 17), либо опосредованно (упомянутые средства 16 могут содержать в этом случае обычный командный пилотажный прибор 18 для предоставления заданных значений пилотирования пилоту, который в этом случае осуществляет наведение вручную).
В отличие от известной системы обычного пилотирования, позволяющей пилотировать летательный аппарат во время неточного захода на посадку, вертикальные и боковые угловые отклонения, обычно вычисляемые средством 12 вычисления, не используются для определения линейных отклонений (которые в рамках настоящего изобретения вычисляются непосредственно средством 11 вычисления). Вместе с тем, эти боковые и вертикальные угловые отклонения могут передаваться через соединение 19 на устройства-пользователи и, в частности:
- в систему 20 отображения и контроля, например, типа CDS (“Control and Display System” на английском языке), которая отображает упомянутые угловые отклонения, по меньшей мере, на один экран в кабине экипажа летательного аппарата; и
- в систему 21 сигнализации и контроля, например, типа FWS (“Flight Warning System” на английском языке), которая использует эти отклонения для осуществления обычных видов контроля.
Таким образом, когда во время полета летательного аппарата пилот хочет произвести автономный заход на посадку (по виртуальной линии захода) с целью посадки на полосу, он выбирает этот вариант захода на посадку при помощи интерфейса человек/машина, обычно предусмотренного в системе 4 управления полетом. В этом случае упомянутая система 4 управления полетом извлекает информацию, позволяющую охарактеризовать виртуальную линию захода на посадку, из базы данных 6, которая является базой навигационных данных летательного аппарата. Эта информация передается в режиме реального времени в бортовое вычислительное устройство 10 наведения. Система 8 позиционирования также передает в упомянутое бортовое вычислительное устройство 10 наведения в режиме реального времени действительное текущее положение в трех измерениях летательного аппарата, которое содержит положение в двух измерениях (широта, долгота) в горизонтальной плоскости, а также геометрическую высоту. При помощи упомянутой линии захода на посадку и упомянутого положения в трех измерениях бортовое вычислительное устройство 10 наведения одновременно вычисляет:
- угловые отклонения, которые отображаются на экране системы 20 отображения и контроля и которые используются для осуществления контроля системой 21 сигнализации; и
- линейные отклонения, которые упомянутое бортовое вычислительное устройство 10 наведения использует для определения заданных значений пилотирования, которые передаются через соединение 15 на средства-пользователи 16.
Отличительным признаком архитектуры системы 1 пилотирования в соответствии с настоящим изобретением (используемой для автономного захода на посадку) является вычисление линейных отклонений непосредственно в бортовом вычислительном устройстве 10 наведения, что позволяет оптимизировать канал наведения.
В частном варианте выполнения для определения действительного текущего положения в трех измерениях летательного аппарата упомянутая система 8 позиционирования содержит:
- устройство спутникового позиционирования;
- барометрические датчики; и
- инерциальные блоки летательного аппарата.
В качестве устройства спутникового позиционирования предпочтительно используют систему GPS (“Global Positioning System” на английском языке) военного типа. Вместе с тем, можно предусмотреть использование глобальной спутниковой навигационной системы типа GNSS (“Global Navigation Satellite System” на английском языке), спутниковой системы увеличения точности, типа SBAS (“Satellite Based Augmentation System” на английском языке) или спутниковую систему позиционирования типа GALILEO.
В частном варианте выполнения упомянутая система 8 позиционирования и упомянутое бортовое вычислительное устройство 10 наведения выполнены каждый на основе трех элементов, а именно - трех блоков позиционирования и трех вычислительных устройств. В этом случае каждый из трех блоков позиционирования вычисляет положение в двух измерениях и гибридную высоту, которые он направляет в три вычислительных устройства. Каждое вычислительное устройство консолидирует положение в двух измерениях и высоту на основании трех полученных данных. В зависимости от технических условий, таких, как взаимное расположение спутников, система 8 позиционирования определяет точность и уровень достоверности вычисленных положений. Если эти параметры не достигают характеристик, требуемых для автономного захода на посадку, система 8 позиционирования направляет сообщение в вычислительное устройство 4 управления полетом, которое сообщает экипажу о невозможности применения автономного захода на посадку, например, путем отображения на экране системы 20 отображения и контроля. Вышеуказанные отличительные признаки позволяют обезопасить использование положения в трех измерениях летательного аппарата при наведении. Кроме того, непосредственное использование этого положения в трех измерениях бортовым вычислительным устройством 10 наведения позволяет оптимизировать латентный период и, следовательно, точность сравнения, в частности, по отношению к известной архитектуре, для которой положение проходит гибридизацию в системе управления полетом перед использованием многорежимным посадочным радиоустройством.
Изобретение относится к области управления летательными аппаратами. Система пилотирования летательного аппарата во время автономного захода на посадку содержит источники информации, которые указывают положение в трех измерениях. Система позволяет охарактеризовать виртуальную линию захода на посадку и содержит средства обработки, входящие в состав бортового вычислительного устройства, которые выполнены с возможностью определения отклонений между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на виртуальной линии захода на посадку. Достигается оптимизация ведения полета на слабых и сильных наклонах и улавливание относительно коротких линий захода на посадку. 2 н. и 4 з.п. ф-лы, 1 ил.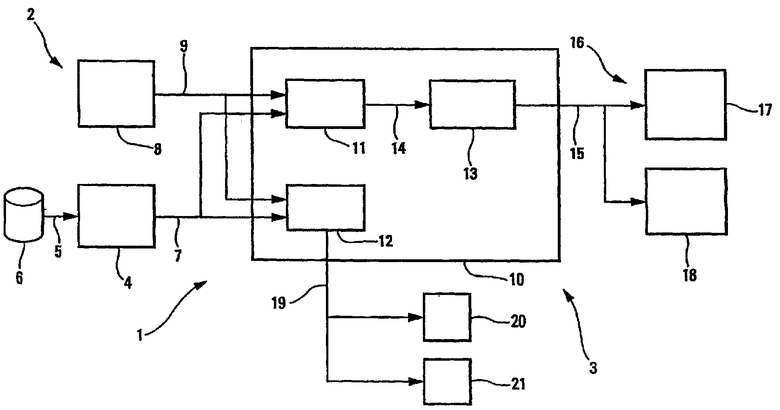
1. Система пилотирования летательного аппарата, по меньшей мере, для пилотирования летательного аппарата во время автономного захода с целью посадки, при этом упомянутая система (1) пилотирования содержит, по меньшей мере, источники (2) информации, которые обеспечивают, по меньшей мере, одно указание положения, связанное с действительным положением в трех измерениях летательного аппарата, и информацию, позволяющую охарактеризовать виртуальную линию захода на посадку, и средства (3) обработки, которые обрабатывают информацию, поступающую от упомянутых источников (2) информации, которые выполнены с возможностью определения отклонений между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на упомянутой виртуальной линии захода на посадку, и которые используют результаты этих видов обработки, отличающаяся тем, что упомянутые средства (3) обработки входят в состав бортового вычислительного устройства (10) наведения, которое содержит: первое средство (11) вычисления для вычисления непосредственно при помощи упомянутого указания положения и упомянутой информации, характеризующей виртуальную линию захода на посадку, линейных отклонений между действительным положением летательного аппарата и упомянутой виртуальной линией захода на посадку, второе средство (12) вычисления для вычисления непосредственно при помощи упомянутого указания положения и упомянутой информации, характеризующей виртуальную линию захода на посадку, боковых и вертикальных угловых отклонений между действительным положением летательного аппарата и положением, которое он занимал бы, находясь на упомянутой виртуальной линии захода на посадку, и третье средство (13) вычисления для вычисления при помощи линейных отклонений, вычисленных упомянутым первым средством (11) вычисления, заданных координат пилотирования летательного аппарата.
2. Система пилотирования по п.1, отличающаяся тем, что упомянутые источники (2) информации содержат вычислительное устройство (4) управления полетом, которое связано с базой данных (6), содержащей, по меньшей мере, упомянутую информацию, позволяющую характеризовать упомянутую виртуальную линию захода на посадку.
3. Система пилотирования по п.1, отличающаяся тем, что упомянутые источники (2) информации содержат систему (8) позиционирования, позволяющую определять действительное положение в трех измерениях летательного аппарата только при помощи бортовых средств.
4. Система пилотирования по п.1, отличающаяся тем, что дополнительно содержит, по меньшей мере, одно средство (16) помощи в пилотировании, которое соединено с упомянутым бортовым вычислительным устройством (10) наведения полета и которое использует упомянутые заданные координаты наведения для помощи в наведении самолета.
5. Система пилотирования по п.1, отличающаяся тем, что дополнительно содержит вспомогательные средства (20, 21), которые соединены с упомянутым бортовым вычислительным устройством (10) наведения и которые используют упомянутые боковые и вертикальные угловые отклонения.
6. Летательный аппарат, отличающийся тем, что содержит систему (1) пилотирования по любому из пп.1-5.
| FR 2852686 A, 24.09.2004 | |||
| ВСПОМОГАТЕЛЬНОЕ ПОСАДОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2184993C2 |
| СИСТЕМА ПОДГОТОВКИ ДАННЫХ ДЛЯ АНАЛИЗА РЕЗУЛЬТАТОВ ПИЛОТИРОВАНИЯ | 2001 |
|
RU2179744C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |

