Изобретение относится к малошумящим движителям для надводного и подводного транспорта, обладающим высоким коэффициентом полезного преобразования энергии, и может быть использовано для транспортных средств в широком диапазоне мощностей.
В настоящее время имеет место массовое применение в надводном и подводном транспорте движителей на базе гребного винта с двумя и более лопастями, которые при угле атаки лопастей 4-8 градусов преобразуют вращение вала двигателя в силу, толкающую транспортное средство вперед.
Весь путь развития и практического совершенствования гребного винта основан на работах Н.Е. Жуковского в его вихревой теории гребного винта [1].
Главным недостатком гребного винта является то, что вращающееся тело, создающее тягу в жидкой среде, неизбежно образует вихри двух видов. Первый - прямолинейный осевой вихрь, образующийся у ступицы винта, и винтовые вихри, число которых равно числу лопастей гребного винта и сходящие из кромок лопастей.
Воздействие вихрей на жидкую среду приводит к появлению местных концентраций пузырьков воздуха и пара, выделившихся из жидкой среды в местах наибольшего разрежения, имеющего место в оси вихря. А след, остающийся в жидкости в виде пузырьков воздуха и пара при работе гребного винта, говорит о том, что образовавшиеся вихри переходят в разряд самостоятельных свободных вихрей с некоторым временем жизни.
Свободные вихри уносят с собой часть высокоорганизованной энергии, вследствие чего уменьшается кпд гребного винта и появляется шум с широким диапазоном частот при схлопывании пузырьков пара и воздуха в центре вихря.
Кроме того, результатом вихревого движения жидкости являются кавитационные явления на поверхности лопастей, приводящие к их разрушению.
Таким образом, существующий способ создания тяги вращающимся гребным винтом приводит к появлению свободных вихрей, что связано с неизбежными энергетическими потерями.
Ниже приведено несколько патентов в качестве аналогов, в которых авторы пытаются частично уменьшить влияние свободных вихрей на кпд гребного винта.
Так, в [2] и [3] авторы пытаются уменьшить потери энергии лопастных вихрей за счет установленных и регулируемых торцевых гребней.
Сами гребни, будь то нерегулируемые или регулируемые, могут только частично затормозить сход свободного вихря с торца лопатки гребного винта, но не затормозить его полностью. Кроме того, появление дополнительной поверхности на торце лопатки, имеющем наибольшую скорость, существенно увеличивает потери на трение с окружающей жидкостью. Особенно значительная часть энергии расходуется на трение при расположении гребного вина во вращающейся втулке, расположенной на торцах лопастей.
Уменьшению потерь энергии, связанных с осевым вихрем, посвящен ряд патентов.
Так, в [4] предлагается разместить гребной винт в цилиндрической насадке, в которой расположены неподвижные лопатки, выполняющие роль спрямляющего аппарата. Наличие неподвижных лопастей в насадке, по утверждению авторов, способствует подавлению кавитации в зазоре между лопастями и насадками, а также за счет поворота потока, увеличивая его осевую составляющую скорости, повышают тягу винта.
Однако авторами не учтен тот факт, что спрямляющий аппарат, выравнивая поток вдоль оси гребного винта, испытывает силу, противоположную развиваемой винтом.
Спрямляющие аппараты могу только разворачивать физическое тело, но не увеличивать тягу. Этот принцип изменения направления вектора тяги широко применяется в ракетных и самолетных двигателях.
Повышение тяги винта в этом случае возможно только при увеличении подводимой мощности к винту, то есть повышении его оборотов, а повышение кпд винта возможно только частично при оптимизации его режимных и конструктивных характеристик.
Авторами косвенно это подтверждено, так как возросшая скорость поверхностей винта относительно окружающей жидкости приводит к появлению кавитационных явлений на поверхностях лопастей и как следствие к шуму, для подавления которого выходные кромки лопаток винта выполнены в виде волновой поверхности.
В патенте [5] авторами предпринята попытка подавления осевого вихря за счет применения контрвинта, расположенного за основным винтом.
Особенностью работы контрвинта является то, что внутренние участки контрвинта работают в турбинном режиме для создания крутящего момента от набегающего потока соосного с ним гребного винта и наружные участки работают в винтовом режиме для получения дополнительной тяги.
К недостаткам рассмотренного аналога следует отнести:
- кольцевой и торцевой зазоры между гребным винтом и контрвинтом составляют всего 0,005-0,01 радиуса гребного винта, что приводит к существенным потерям на трение с жидкостью,
- частота вращения контрвинта всегда меньше на 0,7-0,8 от частоты вращения основного гребного винта, поэтому возникает новый источник генерирования колебаний (эффект сирены),
- в цепочке преобразования энергии - подводимая энергия к гребному винту и образованная кинетическая энергия отбрасываемой массы жидкости, создающая тягу, - появляется дополнительное звено преобразования энергии. Это отбор части энергии от потока жидкости за гребным винтом на турбинную часть контрвинта с получением механической энергии и дальнейшим использованием этой энергии наружным участком контрвинта, работающим в винтовом режиме, для получения дополнительной тяги.
Фактически это паразитное звено, так как в конечном итоге механическая энергия, снимаемая с гребного винта и преобразованная в механическую энергию в турбинной части контрвинта, существенно ниже первичной энергии, подведенной к гребному винту.
Это очевидно, так как нужно перемножить кпд гребного винта на кпд турбинной части контрвинта.
В установке [6] представлена форсированная установка с повышенной тягой за счет двух соосно расположенных гребных винтов противоположного направления вращения.
Здесь сделана попытка повысить эффективность установки за счет устранения кавитационных явлений у ступицы первого винта, вызванных осевым вихрем. Однако при создании сопротивления раскрутки осевого вихря усиливаются винтовые вихри за счет увеличения скорости поверхностей лопастей относительно окружающей жидкости.
Следствием возросших скоростей поверхностей лопаток относительно жидкости являются прогрессирующие кавитационные явления на поверхности лопастей и возросшие шумы в широком диапазоне частот.
Таким образом, увеличение мощности представленной установки ведет к еще большим потерям в винтовых вихрях.
В [7] и [8] представлены мероприятия по уменьшению разрушительного воздействия винтовых вихрей винтов большой тяги.
Так, в [7] высокочастотные колебания, которые передаются винту от судового вала и генерируются в процессе работы лопастей, рассеиваются и гасятся материалом, обладающим высоким демпфирующим свойством и расположенным в пазах поверхности лопастей винта.
В [8] представлены мероприятия, направленные на уменьшение шума в диапазоне 1-10 кГц, возникающего за выходной кромкой лопасти как следствие образования вихревых структур.
Поставленная задача достигается специальным конструированием выходного участка лопасти винта в виде установки на нем гибких вставок.
Предложенное устройство практически не ухудшает, но и не улучшает гидродинамических характеристик винта.
Таким образом, в результате анализа рассмотренных устройств гребных винтов для создания тяги в жидкой среде можно сделать вывод.
Способ работы движителя в жидких средах, основанный на потреблении механической энергии в виде энергии вращения для специально спрофилированных лопастей, установленных с определенным шагом и углом атаки на ступице, доведен до определенной степени совершенства и дальнейшее повышение его эффективности в виде повышения кпд и снижения шумовых характеристик малоэффективен.
Это определено самой природой гидродинамических процессов, сопровождающих работу гребного винта, и связано с потерей энергии на образование, неизбежно сопутствующих, осевого и лопастных вихрей.
В винтовом движителе [9], принятом в качестве прототипа, присутствуют такие же несовершенства, как и в гребных винтах рассмотренных выше аналогов.
В представленной заявке на изобретение предложены способ работы безвихревого гребного винта и устройство движителя для жидких сред на его основе.
Ввиду того что причиной появления вихрей при работе гребного винта является его вращательное движение, в предложенном способе лопасти гребного винта совершают колебательное реверсивное движение на небольшие угловые перемещения относительно оси вращения, а сама лопасть имеет симметричную форму относительно плоскости, проходящей через ось вращения и ось лопасти, и установлена с нулевым углом атаки.
Как известно из газогидродинамики, при обтекании профиля с различной кривизной поверхностей на профиль действует сила, направленная в сторону большей кривизны поверхности профиля.
На формирование вихрей необходимо некоторое время с момента начала движения лопасти, поэтому выбираются такие угловые перемещения лопастей и их скорости, при которых вихри не успевают образоваться.
Количество лопастей, установленных на ступице, может быть две и более, а регулирование тягой движителя может осуществляться как увеличением (уменьшением) угловых перемещений лопастей, так и изменением частоты их колебаний.
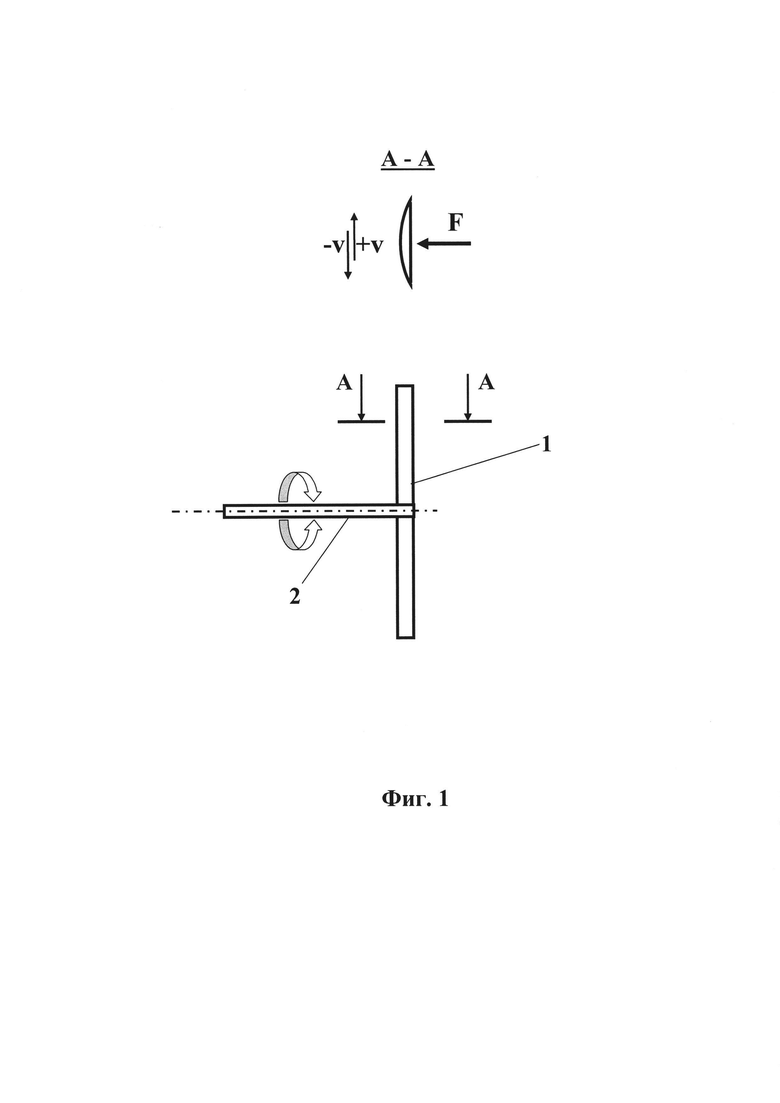
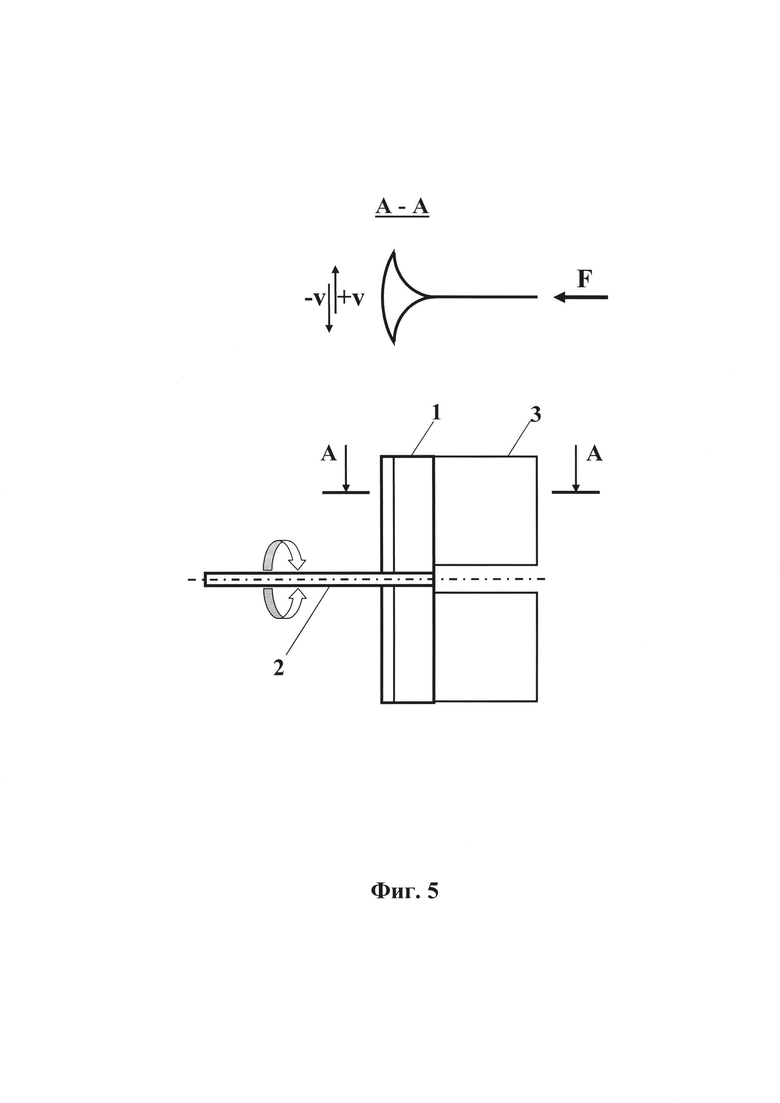
На фиг. 1-5 показано колебательное реверсивное движение в жидкости, размещенной на валу 2, лопасти 1 различных профилей и направление возникающих при этом сил, действующих на лопатку. Везде угол атаки равен нулю.
На фиг. 1 профиль лопасти с одной стороны ограничен выпуклой симметричной поверхностью с кривизной, например частью окружности, эллипса, и плоскостью с другой стороны.
При колебательном реверсивном движении со скоростью (+v) и (-v) возникает сила F, направленная в сторону выпуклой поверхности.
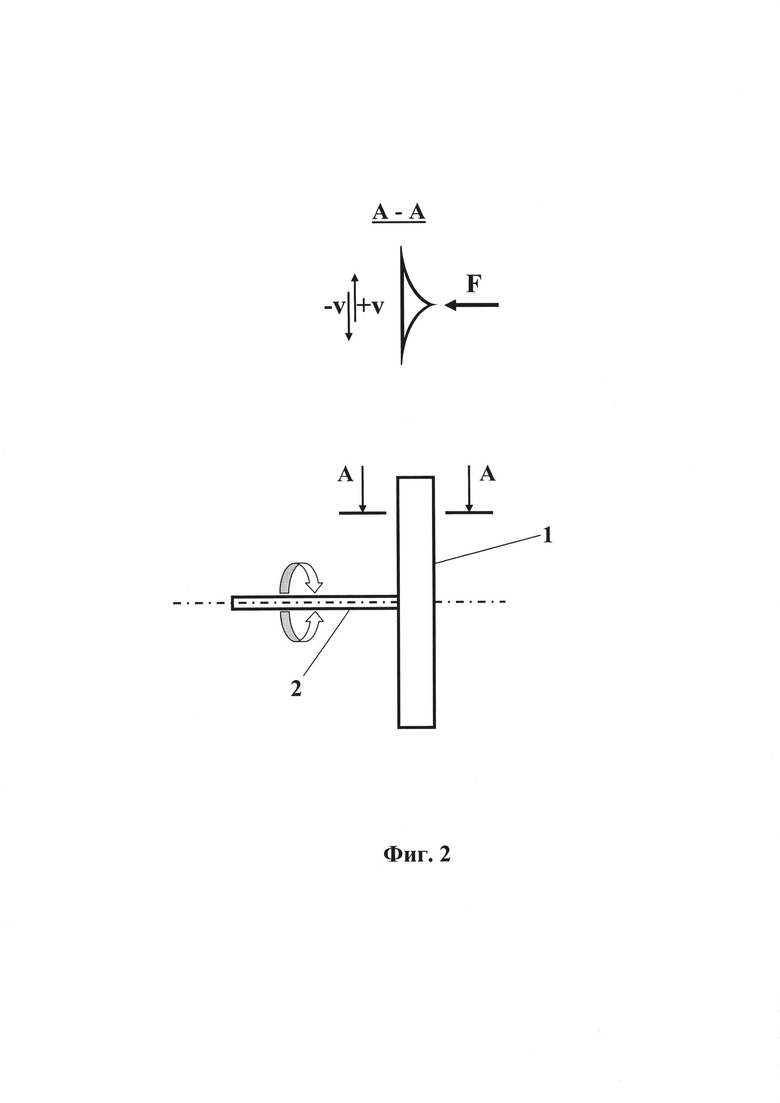
На фиг. 2 - профиль лопасти 1 с двумя вогнутыми симметричными поверхностями с кривизной, например частью окружности или эллипса, и плоскостью с другой стороны.
При колебательном реверсивном движении со скоростью (+v) и (-v) возникает сила F, направленная в сторону плоской стороны.
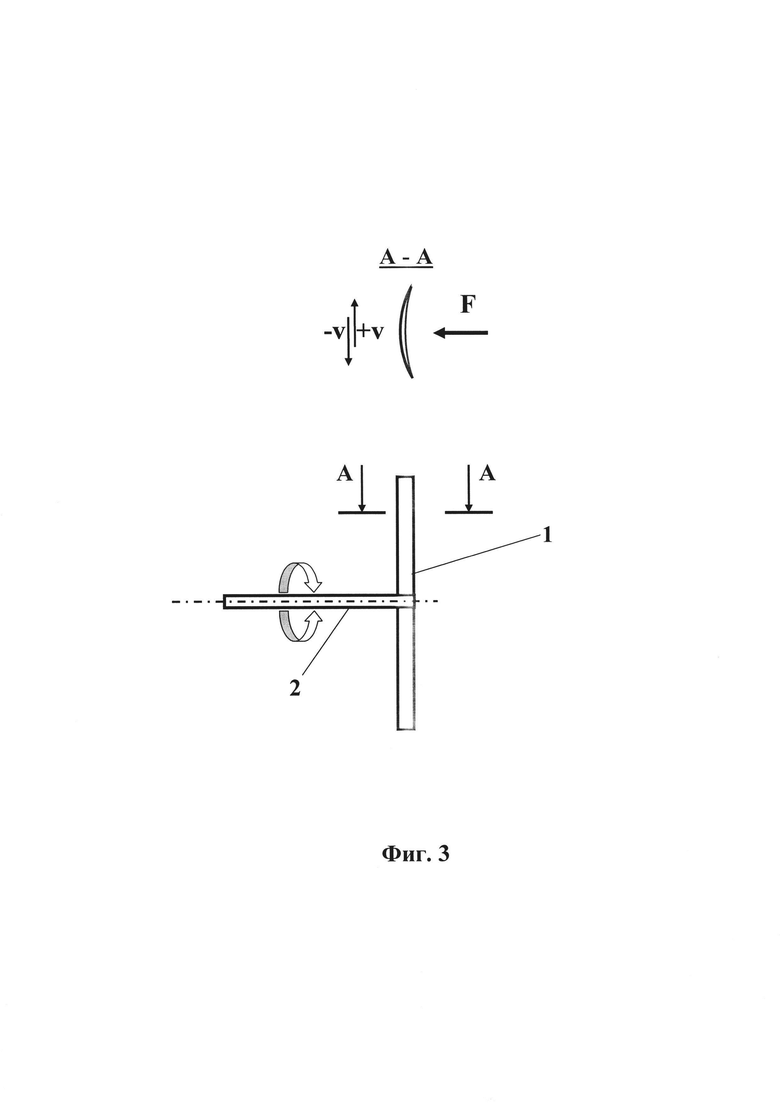
На фиг. 3 профиль лопасти 1 ограничен поверхностью с выпуклой симметричной кривизной с одной стороны, например частью окружности, эллипса, и с другой стороны - поверхностью с вогнутой симметричной кривизной стороны, например частью окружности, эллипса.
При колебательном реверсивном движении со скоростью (+v) и (-v) возникает сила F, направленная в сторону выпуклой поверхности.
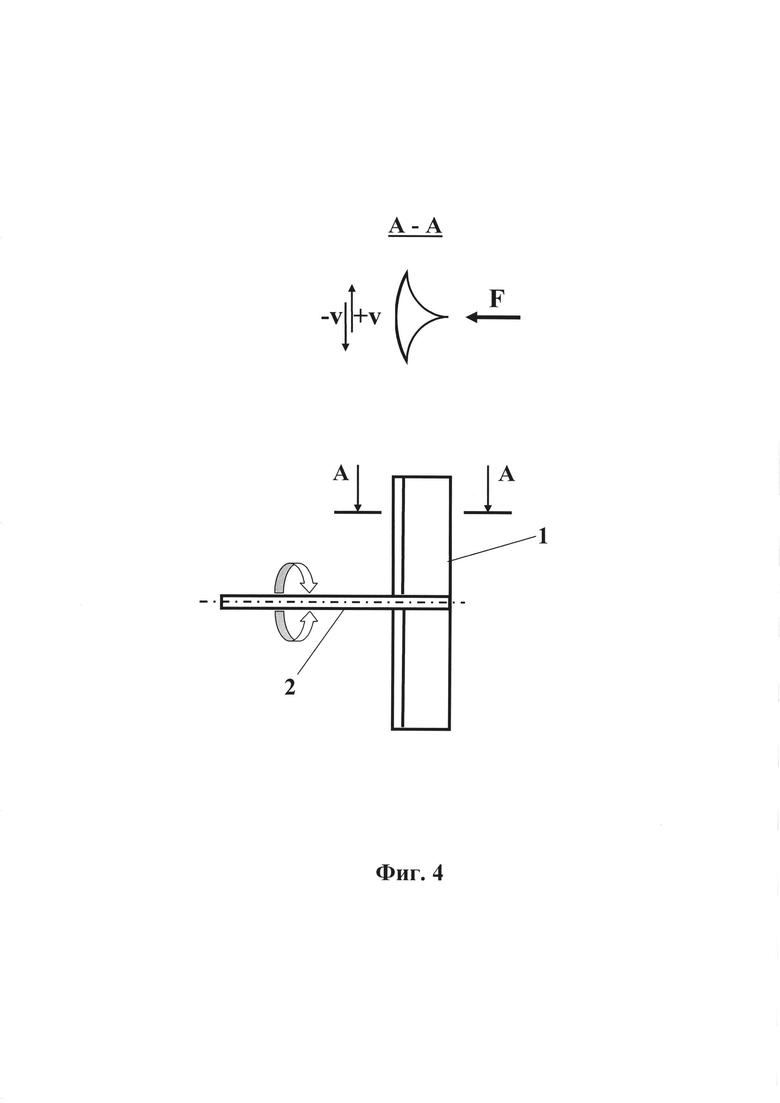
На фиг. 4 профиль лопасти 1 с одной стороны ограничен двумя вогнутыми поверхностями с симметричной кривизной, например частью окружности или эллипса, и выпуклой поверхностью с симметричной кривизной, например частью окружности, эллипса, с другой стороны.
При колебательном реверсивном движении со скоростью (+v) и (-v) возникает сила F, направленная в сторону выпуклой поверхности.
На фиг. 5 представлен профиль лопасти 1, с одной стороны ограниченный выпуклой поверхностью с симметричной кривизной, например частью окружности, эллипса, с другой стороны двумя вогнутыми поверхностями с симметричной кривизной, например частью окружности или эллипса и гибким хвостовиком 3, для создания волнового движения по аналогии с тем, которым в живой природе пользуются мальки рыб, лягушек и т.д.
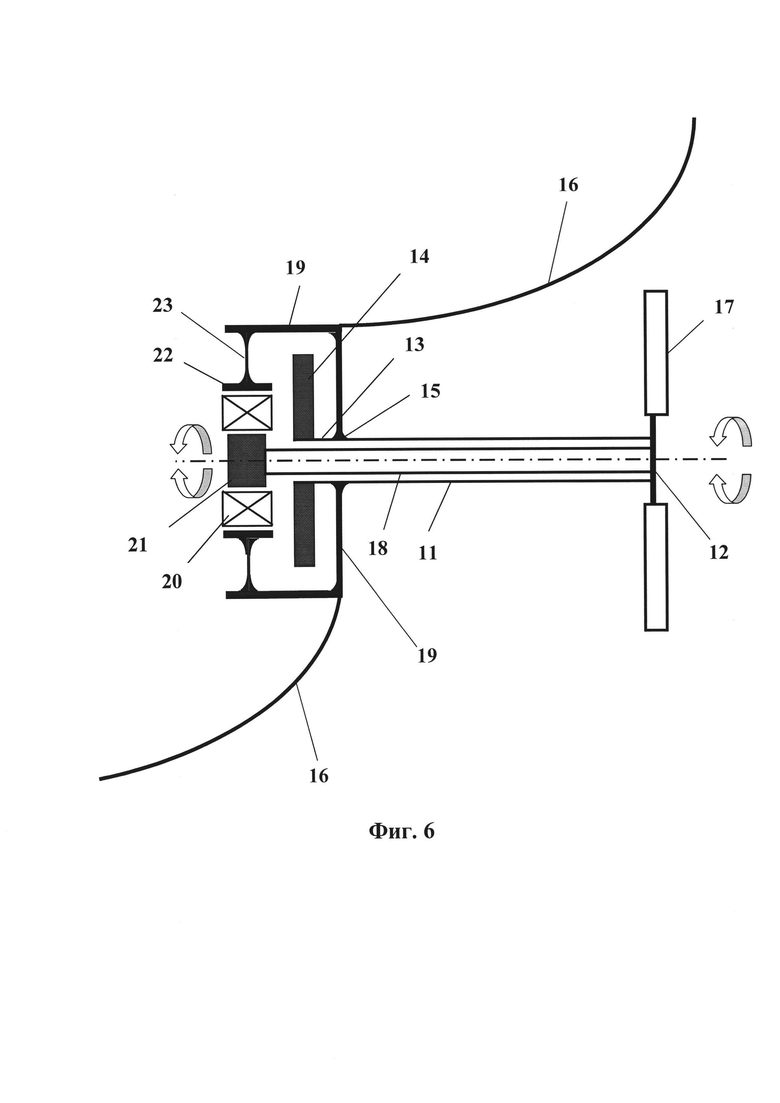
На фиг. 6 представлен движитель на базе генератора крутильных колебаний с регулировкой мощности, подводимой к винту, изменением амплитуды реверсивных угловых перемещений.
Генератор крутильных колебаний состоит из двух жестких валов-торсионов и трех инерционных масс.
В генераторе крутильных колебаний имеется основной торсион, разделенный на две неравнозначные части: длинный торсион 11, соединенный с платформой 12, для привода гребного винта 17 и короткий торсион 13, на конце которого находится диск 14. Диск 14 с коротким торсионом 13 выполняет роль реактивной опоры и угловое перемещение диска 14 всегда направлено против углового движения платформы 12.
Место соединения 15 двух валов-торсионов 11 и 13 является узловой точкой, в которой угловые перемещения вала равны нулю, поэтому сечение в узловой точке 15 основного торсиона служит местом крепления к корпусу 19 генератора крутильных колебаний и к корпусу 16 транспортного средства.
Воздействие, в виде крутильных колебаний, на платформу 12 с расположенными на ней лопастями 17 гребного винта осуществляется посредством третьего (далее дополнительного) вала-торсиона 18. В качестве электромагнитного возбудителя применена система электрической рамки-якоря 21, установленного на другом конце дополнительного вала-торсиона, и находящейся в магнитном поле статора 20 с магнитопроводом 22.
Статор 20 и магнитопровод 22 посредством жесткой связи 23 закреплен в корпусе 19 генератора крутильных колебаний.
Работает генератор крутильных колебаний следующим образом.
Электрический ток синусоидальной формы подается в обмотку статора 20 и воздействует на якорь 21, который через дополнительный вал-торсион 18 передает эти крутильные колебания на платформу 12 и далее на лопасти 17 гребного винта.
Наибольший поворот платформы 12 достигается при равенстве частоты электрических синусоидальных импульсов и собственной механической (резонансной) частоты длинного торсиона 11 совместно с инерционными массами платформы 12 и лопастями 17, а также с учетом приведенной инерционной массы якоря 21.
Лопасти винта с профилем представленным, например, на фиг. 1-5, совершая крутильные колебания и отбрасывая жидкость в одну сторону, создают реактивную тягу, которая через крепление 15 толкает корпус транспортного средства.
Количество лопастей 17, находящихся на платформе 12, может быть 2, 3, 4 и более.
Управление силой тяги такого резонансного движителя осуществляется за счет изменения величины углового перемещения лопастей гребного винта и регулируется подводимой мощностью электрических импульсов.
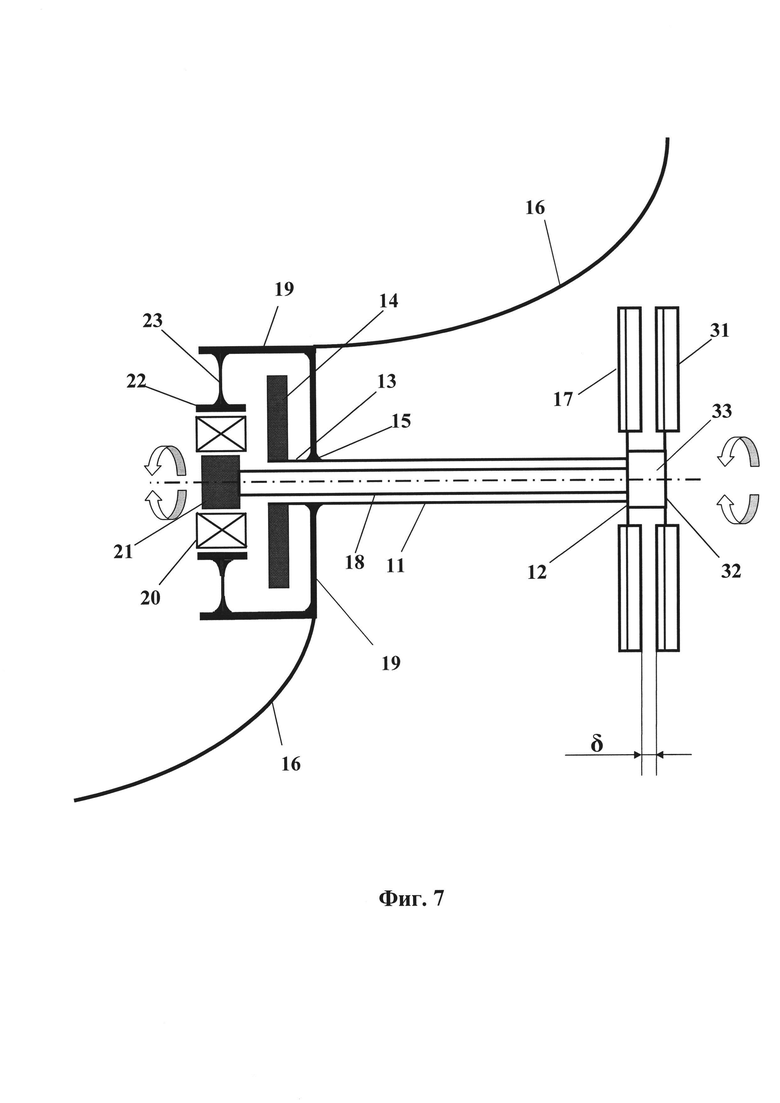
На фиг. 7 представлен вариант движителя на базе генератора крутильных колебаний, в котором для увеличения тяги установлено несколько (в данном случае две - 12 и 32) платформ с лопастями 17 и 31.
Платформ с лопастями может быть 2, 3 и более. Они имеют жесткую связь между собой посредством втулки 33 с образованием зазора δ между лопатками, принадлежащими двум платформам.
Размещение лопастей на платформах может быть как одна за другой или в шахматном порядке, и их компоновочное решение определяется экспериментальным путем. Так же экспериментальным путем определяется зазор δ.
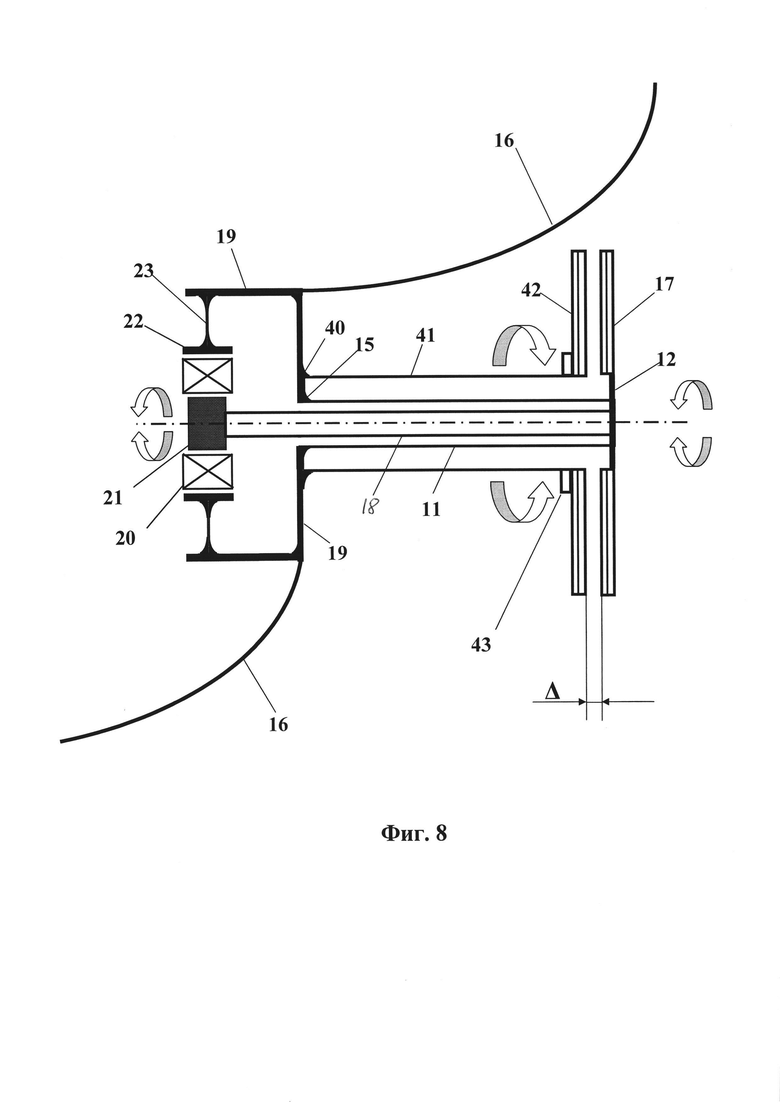
На фиг. 8 представлен вариант движителя на базе генератора крутильных колебаний, в котором для увеличения тяги используется реактивная опора, но в измененном виде. Торсионом здесь является полый вал 41, обращенный в сторону платформы 12, на конце которого установлена инерционная масса, преобразованная в платформу 43 с установленными на ней в один или несколько рядов лопастей 42. На фиг. 8 на платформе представлен один ряд лопастей 42.
Ввиду того что реактивная опора, представленная в первоначальном виде, как на фиг. 6 или фиг. 7, также выполняет крутильные колебания, но в противофазе к платформе 12, то и эти движения можно использовать для увеличения тяги движителя, что и реализовано в устройстве, представленном на фиг. 8.
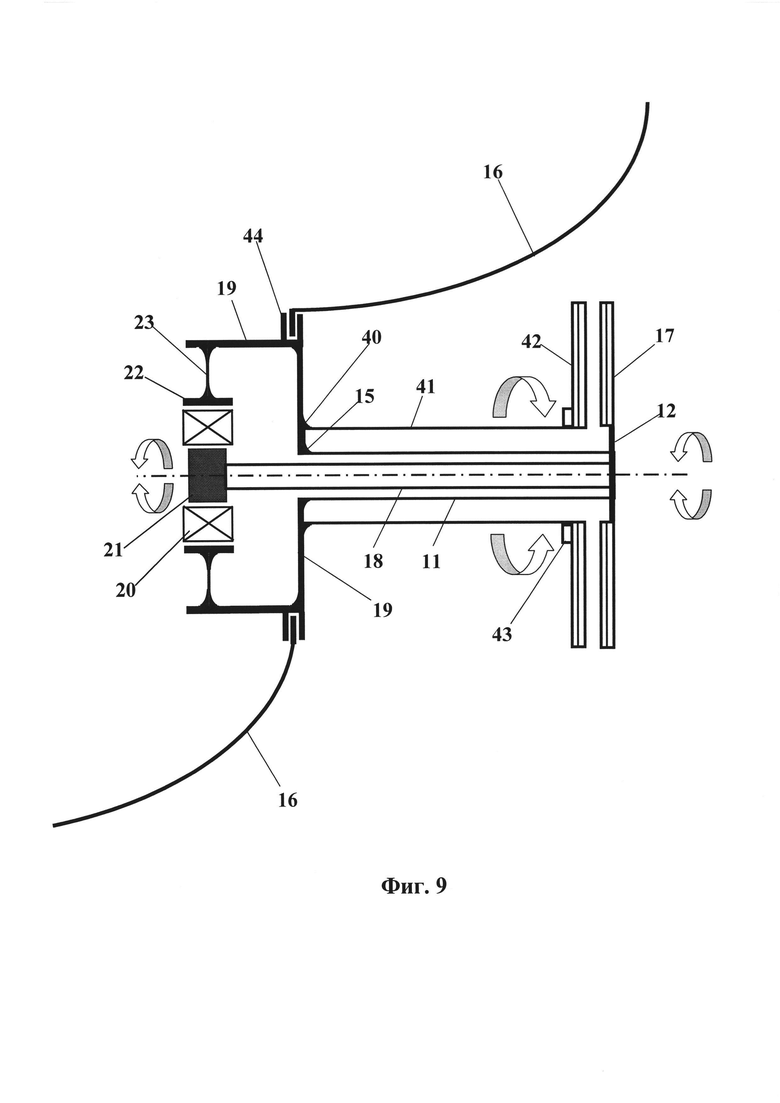
На фиг. 9 представлен вариант теоретически бесшумного движителя. В нем крутящие моменты всех торсионов генератора крутильных колебаний, которые частично передаются на корпус транспортного средства 16 в представленных выше устройствах, замыкаются только на корпус 19 самого генератора, так как движитель установлен в корпусе транспортного средства 16 на радиально-упорном подшипнике 44.
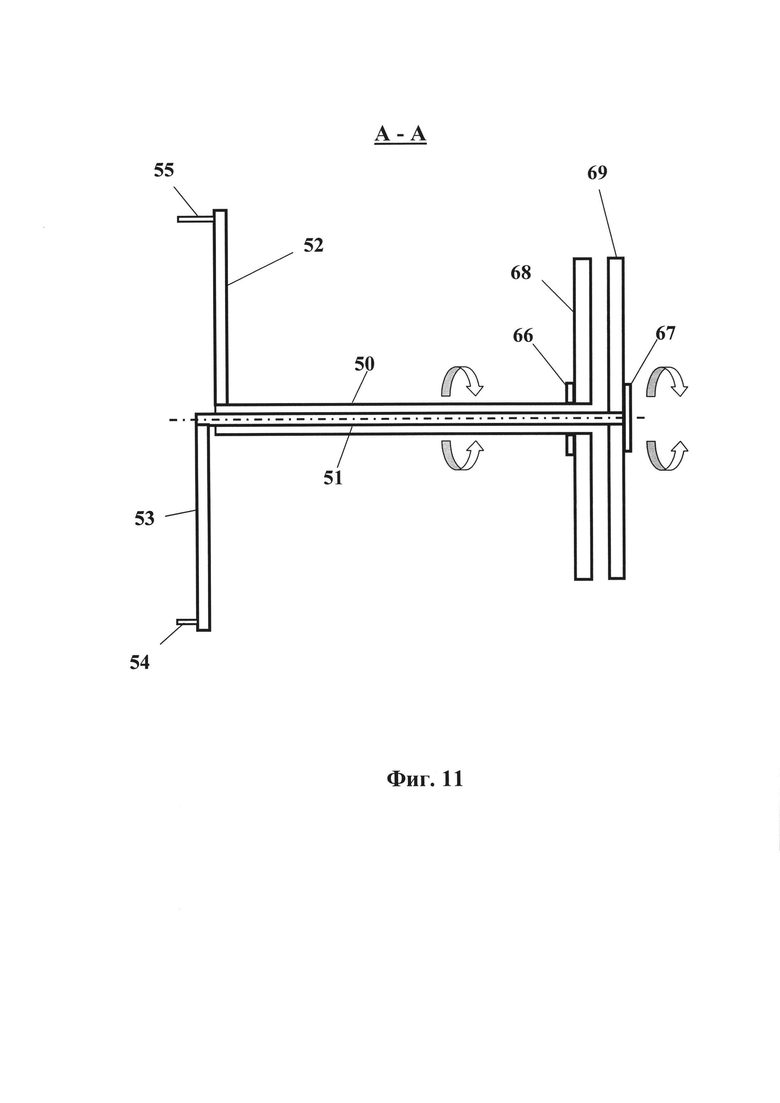
На фиг. 10 и фиг. 11 представлена кинематическая схема устройства движителя с регулировкой мощности за счет изменения частоты колебаний лопастей гребного винта.
Приводом для такого движителя может быть любая энергетическая установка, поставляющая энергию вращающимся валом с регулируемой скоростью вращения.
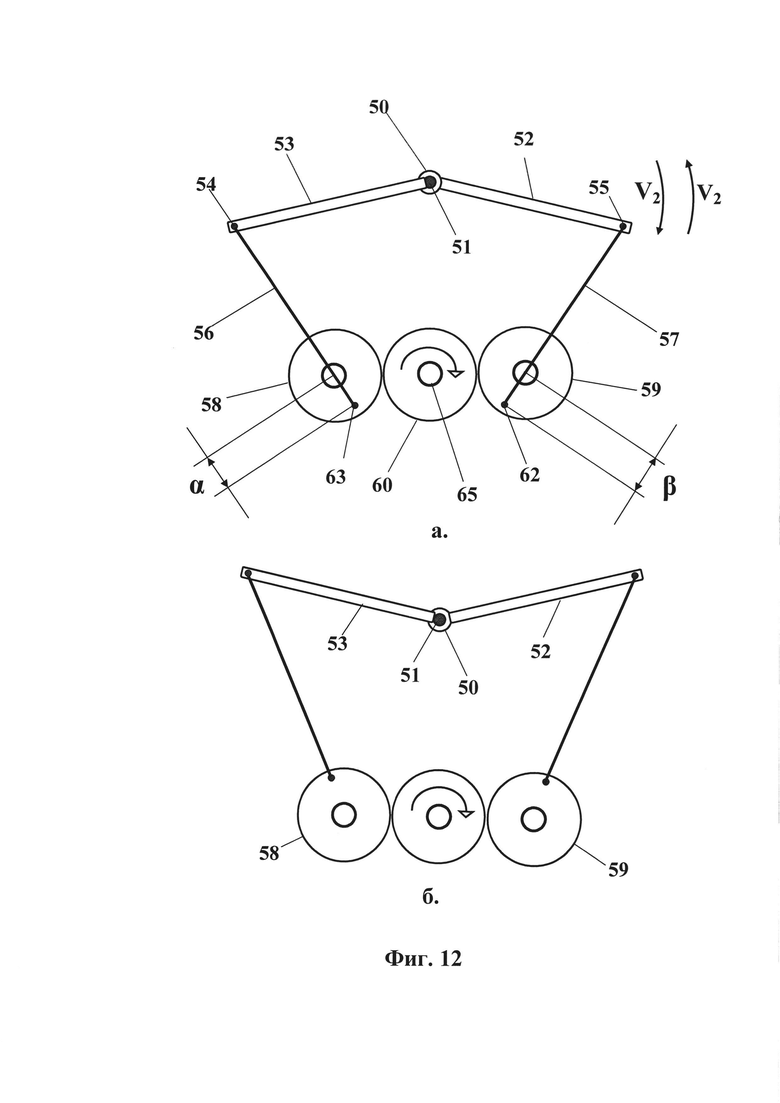
Вал 65, приводимый в движение от энергетической установки, вращает шестерню 60, которая в свою очередь вращает колеса 58 и 59.
На колесах 58 и 59 соответственно установлены эксцентрично оси 63 и 62, которые соединены шарнирно с шатунами 56 и 57, противоположные концы которых также имеют шарнирное соединение посредством осей 54 и 55 с коромыслами 53 и 52 соответственно.
Коромысла 53 и 52, фиг. 11, соответственно жестко соединены с двумя валами 51 и 50, расположенными один внутри другого, на концах которых установлены платформы 66 и 67 с лопастями 68 и 69 гребного винта. При расположении осей на колесах, как показано на фиг. 10а и 10б, коромысла поворачивают валы 50 и 51 в одной фазе.
На фиг. 12а и 12б показан вариант, когда коромысла имеют возможность поворачивать валы 50 и 51 в противофазе. Частоты и амплитуды колебания коромысел со средними скоростями V1 и V2 конструктивно задаются диаметрами колес 58 и 59 и размерами эксцентриситетов α и β.
Количество платформ и количество лопаток на платформе, а также частоты их колебания определяется экспериментальным путем, исходя из гидродинамических условий течения жидкости для достижения максимальной тяги или максимального кпд движителя.
Использованные источники
1. Вихревая теория гребного винта. Н.Е. Жуковский, Гос. Издательство технико-теоретической литературы, Москва, Ленинград, 1950 г.
2. Патент РФ №2222470.
3. Патент РФ №2279992.
4. Патент РФ №2510357.
5. Патент РФ №2291812.
6. Патент РФ №2304545.
7. Патент РФ №2387572.
8. Патент РФ №2501706.
9. Патент РФ №2331546.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| ВРАЩАЮЩИЙСЯ КОНТРВИНТ | 2001 |
|
RU2212355C2 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| СПОСОБ СОЗДАНИЯ СИЛЫ ТЯГИ В ПОДВИЖНЫХ СРЕДАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285633C2 |
| СПИРАЛЕВИДНЫЙ ГРЕБНОЙ ВИНТ ПОДВОДНОГО АППАРАТА | 2007 |
|
RU2344964C1 |
| ГРЕБНОЙ ВИНТ КОНСТРУКЦИИ КАЛАШНИКОВА | 2010 |
|
RU2452653C2 |
| ВРАЩАЮЩИЙСЯ КОНТРВИНТ | 2005 |
|
RU2291812C1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ГИДРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ГРЕБНОГО ВИНТА (ВАРИАНТЫ) | 2004 |
|
RU2281879C2 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |
| ВИНТОВОЙ ДВИЖИТЕЛЬ | 2006 |
|
RU2331546C2 |

Изобретение относится к области судостроения, а именно к малошумящим движителям для надводного и подводного транспорта. Для работы винтового движителя лопасти устанавливают с нулевым углом атаки для совершения колебательных движений в виде реверсивных угловых перемещений относительно оси вращения, при этом лопасти имеют симметричную форму относительно плоскости, проходящей через ось вращения и оси лопастей. Сила тяги движителя задается изменением частоты колебаний лопастей или величиной их угловых перемещений. Генератор крутильных колебаний винтового движителя с регулировкой мощности, подводимой к винту за счет изменения угловых перемещений лопастей винта, и реверсивные угловые перемещения платформы с размещенными на ней лопастями приводятся в движение с помощью механического резонансного устройства. Предложено устройство для преобразования вращательного движения энергетической установки движителя в реверсивное движение платформ с лопастями с регулировкой мощности, подводимой к винту, за счет изменения частоты перемещений лопастей винта. Достигается безвихревой режим работы гребного винта. 3 н. и 8 з.п. ф-лы, 12 ил.
1. Способ работы винтового движителя, содержащего лопасти, которые закреплены радиально на втулке винта, выполненного с возможностью вращения, отличающийся тем, что лопасти винта совершают колебательное движение в виде реверсивных угловых перемещений относительно оси вращения, имеют симметричную форму относительно плоскости, проходящей через ось вращения и оси лопастей, установлены с нулевым углом атаки, а сила тяги движителя задается изменением частоты колебаний лопастей или величиной их угловых перемещений.
2. Способ работы винтового движителя по п.1, отличающийся тем, что профиль лопасти с одной стороны ограничен выпуклой симметричной поверхностью с кривизной, например частью окружности или эллипса, и плоскостью с другой стороны.
3. Способ работы винтового движителя по п.1, отличающийся тем, что профиль лопасти - с двумя вогнутыми симметричными поверхностями с кривизной, например частью окружности или эллипса, и плоскостью с другой стороны.
4. Способ работы винтового движителя по п.1, отличающийся тем, что профиль лопасти ограничен поверхностью с выпуклой симметричной кривизной с одной стороны, например частью окружности или эллипса, и с другой стороны - поверхностью с вогнутой симметричной кривизной, например частью окружности или эллипса.
5. Способ работы винтового движителя по п.1, отличающийся тем, что профиль лопасти с одной стороны ограничен двумя вогнутыми поверхностями с симметричной кривизной, например частью окружности или эллипса, и выпуклой поверхностью с симметричной кривизной, например частью окружности или эллипса, с другой стороны.
6. Способ работы винтового движителя по п.1, отличающийся тем, что профиль лопасти с одной стороны ограничен выпуклой поверхностью с симметричной кривизной, например частью окружности, эллипса, с другой стороны двумя вогнутыми поверхностями с симметричной кривизной, например частью окружности или эллипса и гибким хвостовиком для создания волнового движения.
7. Генератор крутильных колебаний винтового движителя с регулировкой мощности, подводимой к винту, за счет изменения угловых перемещений лопастей винта, отличающийся тем, что реверсивные угловые перемещения платформы с размещенными на ней лопастями производятся с помощью механического резонансного устройства, включающего в себя основной вал-торсион, разделенный на две части, на длинной части которого расположена платформа для лопастей, а на короткой части, выполняющей роль реактивной опоры, расположена инерционная масса, с креплением основного торсиона в месте соединения этих двух частей в узловой точке к корпусу генератора, а возбуждение крутильных колебаний платформы с лопастями осуществляется посредством дополнительного вала-торсиона от электромагнитной системы.
8. Генератор крутильных колебаний по п.7, отличающийся тем, что на конце длинной части основного вала-торсиона расположена не одна, а несколько платформ с лопастями.
9. Генератор крутильных колебаний по п.8, отличающийся тем, что короткая часть основного вала-торсиона обращена в сторону длинной части основного вала-торсиона, на конце которой установлена одна или несколько платформ с лопастями, выполняющих роль реактивной опоры.
10. Генератор крутильных колебаний по п.8, отличающийся тем, что корпус генератора установлен в корпусе транспортного средства на радиально-упорном подшипнике.
11. Устройство для преобразования вращательного движения энергетической установки движителя в реверсивное движение платформ с лопастями с регулировкой мощности, подводимой к винту, за счет изменения частоты перемещений лопастей винта, отличающееся тем, что реверсивные угловые перемещения платформы с размещенными на ней лопастями производятся с помощью устройства, включающего в себя энергетическую установку, поставляющую энергию вращающимся валом с регулируемыми оборотами шестерне, находящейся в зацеплении с двумя колесами и размещенными на них осями-эксцентриками, для преобразования движения посредством шатунов и коромысел в реверсивные крутильные колебания соосно расположенных валов, на конце которых установлены платформы с лопастями.
| ВИНТОВОЙ ДВИЖИТЕЛЬ | 2006 |
|
RU2331546C2 |
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ АППАРАТА В ТЕКУЧЕЙ СРЕДЕ И ДВИЖИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2172700C2 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 3442244 A, 06.05.1969. | |||

