Настоящее изобретение относится к сооружению для автоматизированного хранения объектов различных видов, например таких, как автомобили или поддоны.
Автоматизированные многоэтажные сооружения для хранения известны на протяжении длительного времени, позволяя возводить как наружные (надземные) конструкции, так и подземные конструкции.
Примеры автоматизированных систем для хранения, особенно пригодных для автомобилей, раскрыты в патенте Германии 4334973 и в международной публикации WO 01/04439.
Однако известные решения требуют использования сложных систем и вряд ли предпочтительны, поскольку в них для размещения нового объекта в желаемом положении обычно требуется перемещение большого количества элементов.
Задача настоящего изобретения заключается в создании сооружения для хранения, которое рационально, имеет низкую стоимость и обеспечивает простоту его изготовления и управления им.
Вышеупомянутые и другие задачи настоящего изобретения достигнуты посредством системы хранения, заявленной в прилагаемых пунктах формулы изобретения.
Согласно изобретению сооружение содержит одно или более автономных базовых сооружений или модулей, которые расположены рядом друг с другом для образования сооружений с весьма высоким использованием пространства.
Предпочтительно, чтобы в каждом модуле сооружения для хранения, выполненном согласно изобретению, на каждом уровне было обеспечено обслуживание подъемником вплоть до четырех боксов, расположенных в крестообразной форме. Перемещение для загрузки осуществляют посредством тележек, которые совершают поступательное перемещение от платформы подъемника и к платформе в соответствии с взаимно перпендикулярными направлениями вдоль надлежащих направляющих, например рельсов, которые пересекаются на самой платформе.
Таким образом, удается избежать необходимости поворотных перемещений платформы подъемника или относительных смещений тележек, посредством чего конструкция сооружения выполнена более компактной и функциональной.
Кроме того, согласно изобретению предпочтительно, чтобы поступательное перемещение тележек относительно платформы было обеспечено посредством систем, состоящих из цепей и звездочек, расположенных под платформой подъемника.
Таким образом, все элементы для перемещения тележек сгруппированы у платформы каждого подъемника, в результате чего будут достигнуты преимущества с точки зрения автономности. Независимость базовых сооружений или модулей по отношению друг к другу обеспечивает возможность их полной взаимной изоляции, так что повреждения, вызываемые пожаром или взрывами и касающиеся одного или более модулей, могут быть значительно уменьшены.
Другие отличительные признаки и преимущества изобретения будут более понятны из описания предпочтительных, но не только их, вариантов его осуществления, показанных на прилагаемых чертежах, на которых:
на фиг.1 представлен схематический боковой вид базового сооружения или модуля согласно изобретению;
на фиг.2 представлен вид сверху модуля, показанного на фиг.1;
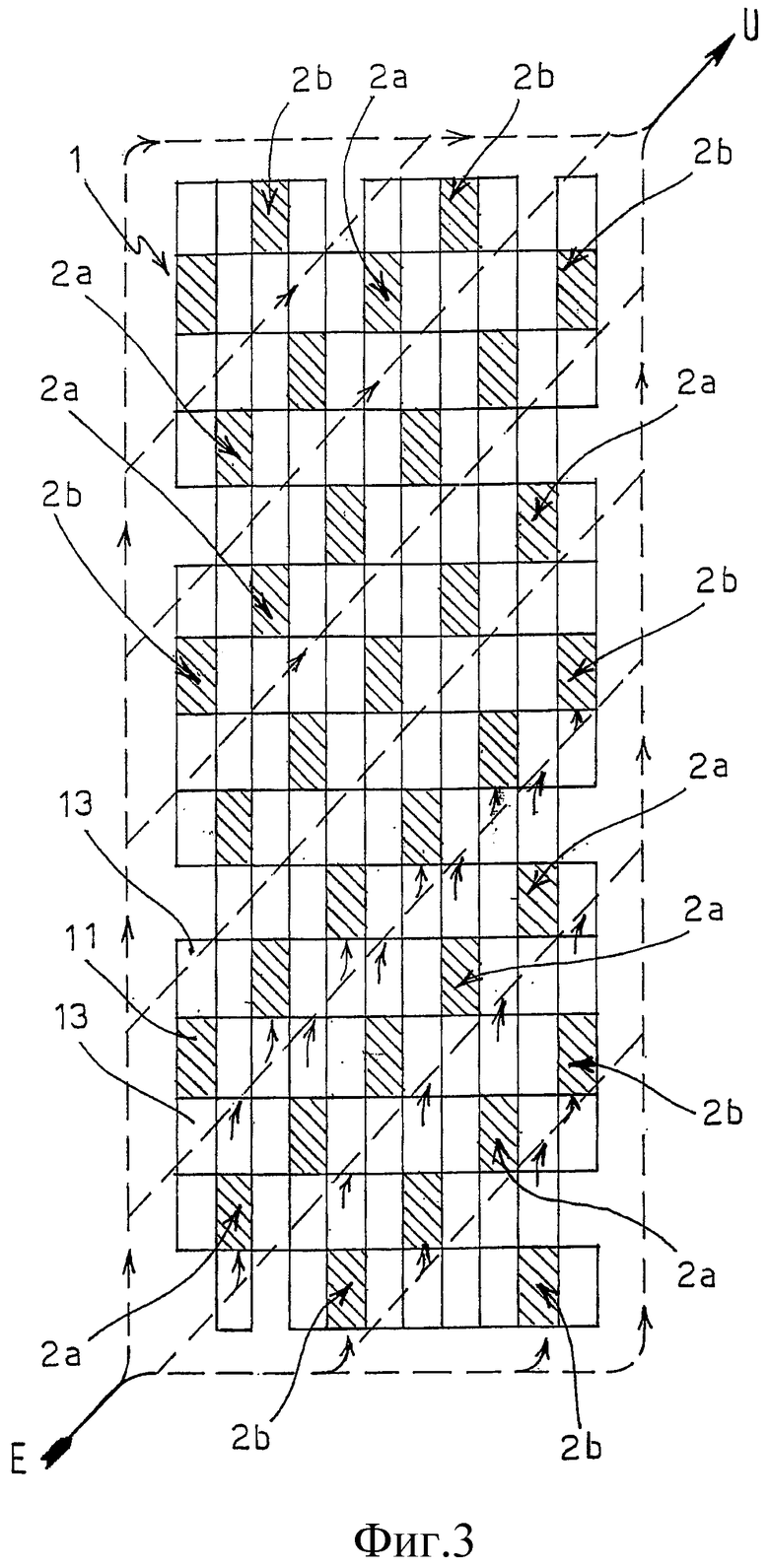
на фиг.3 представлен схематический вид в плане многомодульного сооружения для хранения, выполненного согласно изобретению;
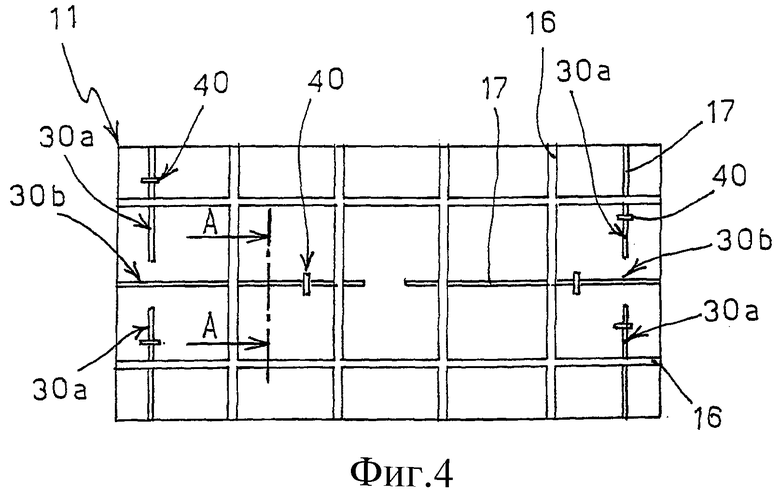
на фиг.4 представлен схематический вид платформы сверху;
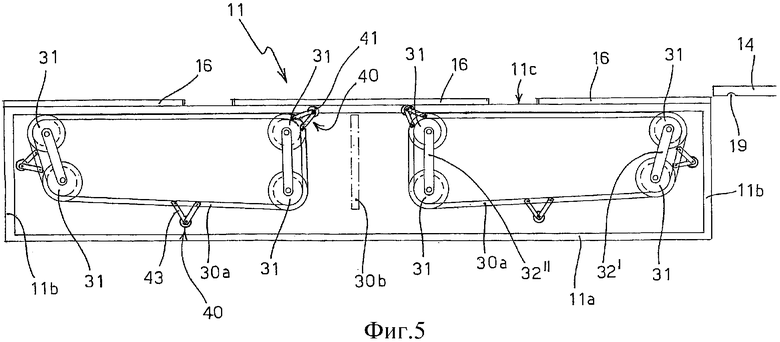
на фиг.5 представлен вид спереди платформы, показанной на фиг.4, в первом положении (в нерабочем положении);
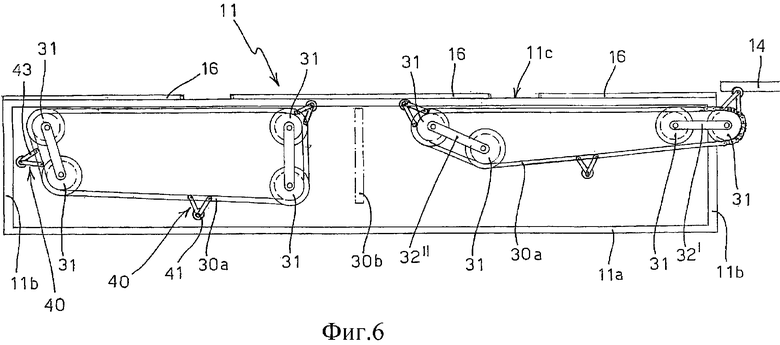
на фиг.6 представлен вид спереди платформы, показанной на фиг.4, во втором положении (в рабочем положении);
на фиг.7 представлен частичный вид в поперечном сечении по линии А-А платформы, показанной на фиг.4;
на фиг.8 представлен боковой вид фрагмента фиг.7;
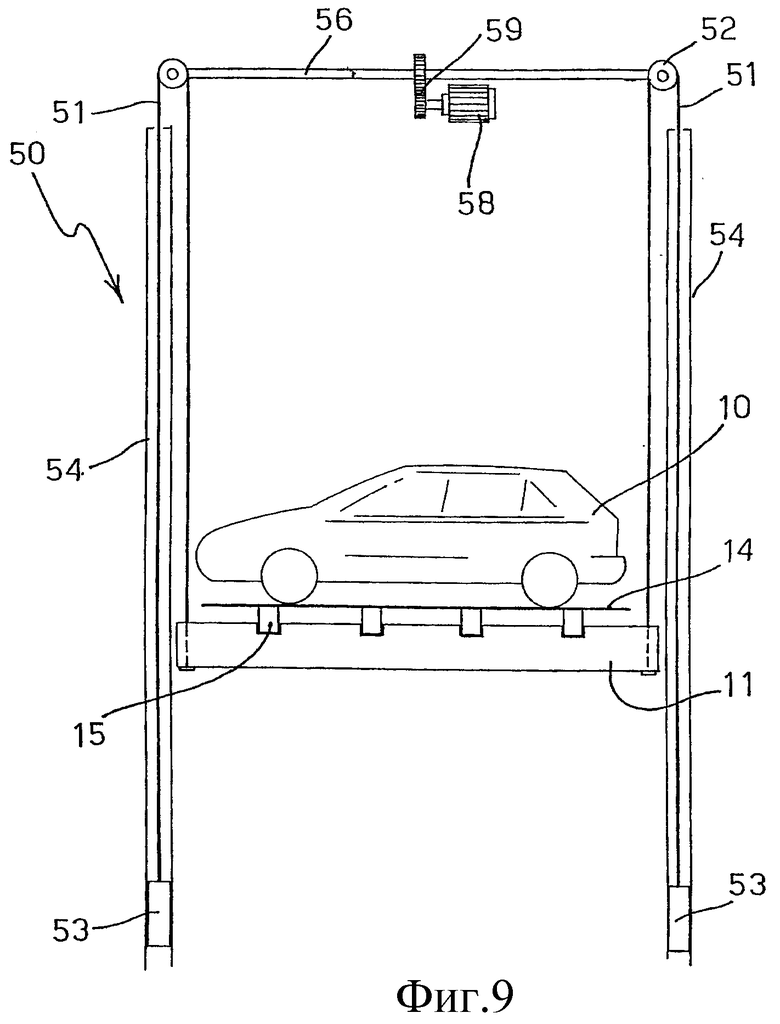
на фиг.9 представлен схематический боковой вид подъемника;
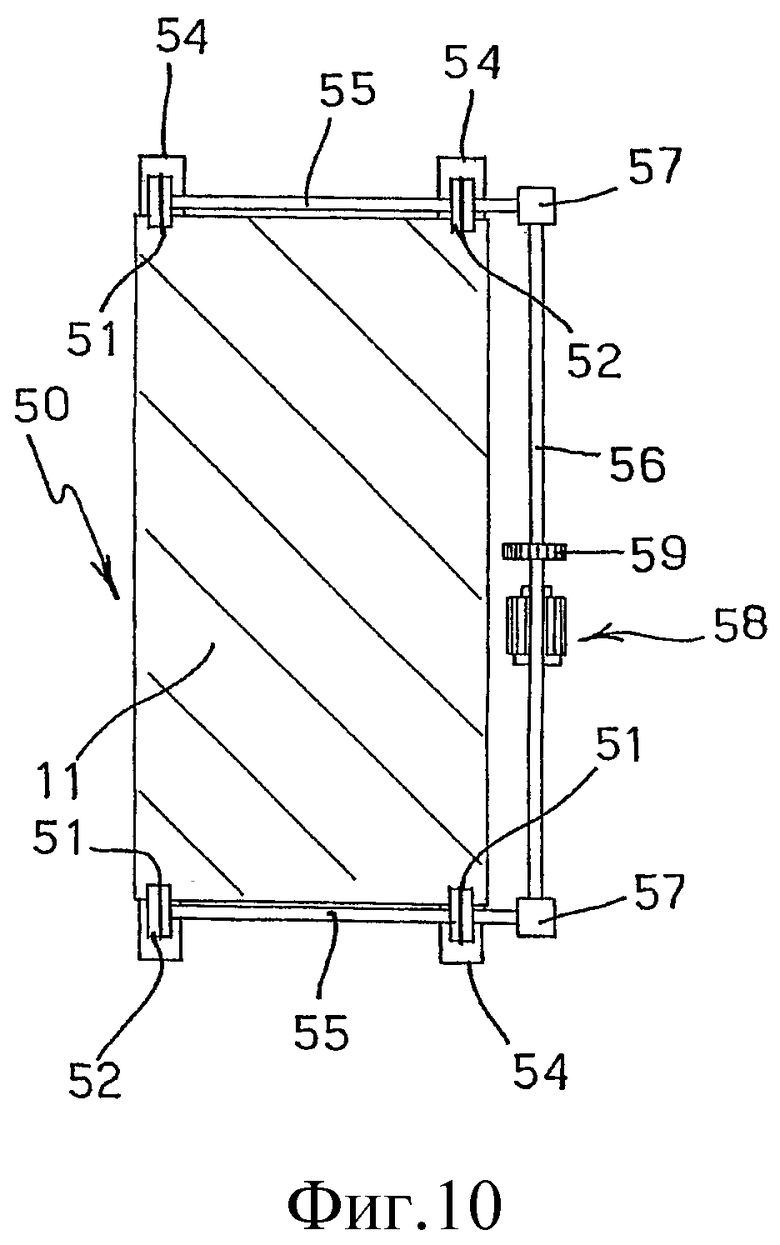
на фиг.10 представлен вид сверху подъемника, показанного на фиг.9;
Как показано на фиг.1 и 2, сооружение 1 для хранения, выполненное согласно изобретению, состоит из многоэтажной конструкции, содержащей подъемник 50, перемещаемый по вертикали с помощью надлежащих средств в шахте 12, расположенной по центру модуля, и большого количества боксов 13, форма и поверхность которых соответствуют плоскости шахты 12 и которые расположены на разных уровнях L1, L2...Ln сооружения 1.
Предпочтительно, чтобы на каждом уровне находились четыре бокса 13. Боксы имеют четырехугольную, предпочтительно прямоугольную, форму и расположены крестообразно вокруг подъемника 50, так что одна сторона каждого бокса 13 примыкает к одной стороне шахты 12, в которой перемещается подъемник 50.
Как показано на фиг.3, сооружение 1 содержит первые модули 2а, имеющие в плане крестообразную форму, и вторые модули 2b, имеющие в плане Т-образную форму. Первые модули 2а будут расположены по центру конструкции, а вторые модули 2b будут расположены вдоль периметра конструкции.
Фиг.3 относится к парку автомобилей и на ней показана рациональная компоновка из тридцати трех модулей 2а, 2b на площади, примерно составляющей 1800 м2 (24 м × 75 м). Конструкция обеспечивает более 600 мест стоянки посредством использования пятиэтажных модулей, для чего в случае подземного сооружения требуется вырыть котлован глубиной порядка 11 м.
Модули 2а, 2b расположены рядом друг с другом таким образом, что в каждом первом модуле 2а три последовательных стороны из двенадцати сторон периметра креста соприкасаются с тремя сторонами каждого смежного модуля. Такая компоновка обеспечивает рациональную эксплуатацию имеющегося пространства и, кроме того, обеспечивает возможность резервирования определенного уровня, например уровня грунта, для захождения на каждый подъемник 50 и схода с него по косо идущим дорожкам (пунктирные линии на фиг.3). Таким образом, обеспечен оптимальный доступ к подъемникам 50 с возможностью легкого захождения автомобилей на подъемники 50 и схода с них.
Конструкция также может быть выполнена надземной без необходимости создания на верхней части каждого подъемника 50 уклонов и легких покрытий на случай плохой погоды.
Каждый подъемник 50 в каждом модуле 2а, 2b снабжен прямоугольной платформой 11, которая может достигать разных уровней L1, L2...Ln сооружения 1.
Каждый бокс 13 может вмещать в себя тележку 14, на которую может быть размещен хранящийся объект (объекты). Кроме того, каждая тележка 14 снабжена колесами или опорами 15 и предпочтительно будет обслуживать только один бокс 13.
В зависимости от требований к построению каждый уровень L1, L2...Ln сооружения 1 может содержать от одного до четырех боксов 13 для приспосабливания конструкции к конфигурации грунта в случае подземного сооружения, либо для получения определенной конфигурации с точки зрения эстетики в случае надземного сооружения.
Каждый модуль 2а, 2b, предназначенный для хранения, образует независимый блок, а это преимущественно обеспечивает многосторонность сооружения для хранения: фактически посредством комбинации подходящего количества модулей можно будет обеспечивать хранение от небольшого количества автомобилей, что требуется в случае сооружений с небольшим количеством помещений, до тысяч автомобилей для их парковки в торговых или промышленных центрах.
В случае сооружения для парковки автомобилей платформа 11 соответственно имеет прямоугольную форму, которая раскрыта выше и которой приданы такие размеры, чтобы она вмещала в себя один автомобиль 10. Однако изобретение может быть построено так, что в нем будет обеспечено использование платформ, имеющих разные формы, например имеющих в плане форму квадрата, и соответствующие размеры в зависимости от объектов, подлежащих хранению.
Как показано на фиг.4-6, платформа 11 имеет основание 11а, от которого вверх выступает группа стоек 11b. Стойки 11b предназначены для удерживания плоскости 11с, имеющей полые рельсы 16, предназначенные для придания направления колесам 15 тележек 14, когда последние загружают на платформу 11 и выгружают с нее.
Колеса 15 тележек 14 ориентированы в зависимости от взаимно перпендикулярных направлений, по которым тележки 14 могут перемещаться от платформы 11 и к платформе и которые расположены параллельными рядами, так чтобы они соответствовали полым рельсам 16, установленным на платформе 11.
Соответствующие рельсы также установлены в боксах 13 для придания направления тележкам 14 и для сохранения выравнивания колес 15 по отношению к рельсам платформы 11.
Рельсы 16 на платформе 11 ориентированы соответственно двум перпендикулярным направлениям для обеспечения перемещения какой-либо тележки 14 как в продольном, так и в поперечном направлении относительно платформы 11.
Средства для поступательного перемещения тележек, обеспечивающие возможность загрузки тележек 14 на платформу 11 и их выгрузки с платформы, расположены между плоскостью 11с и основанием 11а платформы 11.
Такие средства для поступательного перемещения тележек 14 содержат цепи или ремни 30а, 30b, которые расположены вдоль взаимно перпендикулярных осей, параллельных сторонам платформы 11, и которые взаимодействуют с парой звездочек или зубчатых колес, или шкивов 31, приводимых в движение двигателями (не показаны), также расположенными в основании платформы 11.
Согласно предпочтительному варианту осуществления изобретения установлены, по меньшей мере, шесть цепей 30а, 30b, расположенных в виде Н-образной конфигурации. Четыре цепи 30а расположены вблизи от меньших сторон платформы 11 параллельно ей, в то время как две остальные цепи 30b расположены перпендикулярно первым цепям вдоль центральной линии платформы, как показано на фиг.4.
Кроме того, цепи 30а, 30b обеспечены группой зацепных элементов 40, предназначенных для соединения с тележками 14, для перемещения их от платформы 11 к боксам 13 и наоборот. Элементы 40 выступают от плоскости 11с платформы через соответствующие прорези 17, образованные в плоскости 11с.
Предпочтительно, чтобы цепи 30а, 30b и соответствующие прорези 17 имели такую длину и такое расположение, чтобы они не создавали друг другу помех.
Звездочки 31, с которыми входят в зацепление цепи 30а, 30b, попарно расположены на колебательных плечах 32', 32". Плечи 32' могут поворачиваться, что обеспечивают известными средствами, например пневматическими или гидравлическими цилиндрами (не показаны), к наружной стороне платформы 11, в то время как плечи 32" отслеживают движения плеч 32' и упруго удерживаются посредством устройства, действующего в качестве натяжного устройства.
Благодаря колебательным плечам 32', 32" каждая цепь 30а, 30b может занимать два положения: первое положение, или нерабочее положение, при котором каждая цепь 30а, 30b находится в пределах периметра платформы 11, таким образом обеспечивая перемещение платформы в вертикальном направлении вдоль шахты 12, и второе положение, или рабочее положение, при котором часть каждой цепи 30а, 30b выступает за край платформы 11 и посредством одного из элементов 40 входит в зацепление с тележкой 14 с внутренней стороны соответствующего бокса 13.
Н-образное построение шести цепей 30а, 30b обеспечивает наличие двух цепей 30а, выступающих с каждой большей стороны платформы 11, и одной цепи 30b, выступающей с каждой меньшей стороны платформы.
При достижении рабочего положения, при котором каждая цепь 30а, 30b выступает из платформы 11, а элемент 40 находится в надлежащем положении для соединения с тележкой 14, плечо 32' будет заторможено, так что соответствующая цепь 30а, 30b может безопасным образом обеспечивать поступательное перемещение тележки 14.
Предпочтительно, чтобы были установлены три зацепных элемента 40, при этом они выполнены таким образом, что последовательно заходят в соответствующие посадочные места 19, образованные в нижней поверхности тележки 14, посредством чего тележки перемещаются от платформы 11 и к платформе в зависимости от направления вращения соответствующей цепи.
Тележку 14 блокируют на платформе 11 с помощью стопорных средств (не показаны), например тормоза/захвата, выступающего из самой платформы 11. Как только тележка 14 будет заблокирована, плечи 32" освобождаются, а плечи 32' будут возвращены назад в их нерабочее положение. При этом платформа 11 может перемещаться вдоль шахты 12 и подводит тележку 14 к уровню, обеспечивающему возможность загрузки/выгрузки объектов, подлежащих хранению. После захождения нового груза платформа 11 совершает перемещение, пока не достигнет уровня, соответствующего исходному боксу. Ту же самую тележку 14 с ее грузом вновь помещают в бокс посредством зацепных элементов 40 благодаря вращению цепи, после того как тележка 14 будет освобождена от стопорных средств и после того как колебательные плечи 32', 32" будут повернуты к наружной стороне платформы 11.
При необходимости платформа 11 будет перемещаться вдоль шахты 12, то есть она будет перемещаться, чтобы забрать пустую тележку из соответствующего бокса 13 и начать загрузочную операцию или чтобы забрать загруженную тележку для разгрузки хранящегося объекта (объектов).
На фиг.7 и 8 яснее показано, что каждый зацепной элемент 40 содержит ролик 41, предпочтительно изготовленный из нежесткого материала и удерживаемый парой сдвоенных вилок 42. Сдвоенные вилки 42 крепят одним концом посредством пальцев 46 к соответствующей цепи 30а, 30b в надлежащим образом отстоящих друг от друга звеньях 33 цепи 30а, 30b. Кроме того, другой конец вилок 42 шарнирно соединен с соответствующим роликом 41 посредством поворотного пальца 44, вокруг которого может вращаться ролик 41.
Пальцы 46 скользят (посредством соосных с ними подшипников или втулок либо без них) внутри направляющих 47, расположенных с обеих сторон каждой цепи 30а, 30b и прикрепленных ниже плоскости 11с вдоль прорезей 17 для стабилизирования сдвоенных вилок 42 в течение перемещения цепи 30а, 30b, когда зацепные элементы 40 находятся в зацеплении с посадочными местами 19.
Каждую сдвоенную вилку 42 изготавливают из двух держателей 43, которым придана такая форма, что когда они соприкасаются друг с другом, образуют посадочное место для ролика 41, и имеют прямоугольную часть, проходящую через прорезь 17, и посадочное место для звена 33 цепи 30а, 30b. Для придания вилке 42 повышенной прочности держатели 43 припаивают друг к другу вдоль соприкасающихся участков 43а.
Помимо зацепных элементов 40, раскрытых со ссылкой на предпочтительный вариант осуществления конструкции, могут быть изготовлены зацепные элементы иной формы при условии, что они выступают соответствующим образом для зацепления с надлежащими посадочными местами или выступами, например в форме зубца или лопатки, обеспеченных в тележках 14.
На фиг.9 и 10 изображено подъемное устройство или подъемник 50 для перемещения платформы 11 в вертикальном направлении вдоль шахты 12.
Подъемник 50 содержит четыре цепи 51, прикрепленные к углам платформы 11 и вращающиеся вокруг соответствующих звездочек 52, прикрепленных к двум валам 55, расположенным на верхней части подъемника, при этом валы параллельны друг другу и находятся вблизи от меньших сторон платформы 11.
Установлен двигатель 58, предназначенный для вращения валов 55 и, следовательно, для возможности перемещения платформы 11 подъемника 50 вверх и вниз. Двигатель приводит в движение валы 55 посредством приводной шестерни 59, вспомогательного вала 56 и пары червячных редукторов 57.
Каждая цепь 51 на ее свободном конце дополнительно снабжена противовесом 53, который имеет возможность скольжения в соответствующем посадочном месте 54, выполненном рядом с шахтой 12 подъемника 50. Предпочтительно, чтобы противовесы совершали скольжение в трубчатых элементах с квадратным или прямоугольным поперечным сечением, которые расположены по углам шахты 12 и, кроме того, служат в качестве конструктивных элементов модуля.
Благодаря такой компоновке валов и редукторов будет получено двойное преимущество, заключающееся в том, что тяга цепей синхронизирована, а крутящий момент, передаваемый к звездочкам, нагружает валы 55 так, что весовая нагрузка на другие приводные элементы уменьшается.
Другие важные преимущества заключаются в простоте конструкции, в уменьшении пространства как в высоту, так и в ширину, и в доступности всех средств приведения в действие и управления в заданном месте поверхности; такая доступность не могла бы быть обеспечена при гидравлической системе подъема в случае подземного сооружения.
Описанное решение, обеспечивающее преимущество с точки зрения механики, также позволяет использовать четыре троса вместо четырех цепей, когда один конец каждого троса жестко заделан в углу платформы, а другой его конец жестко заделан в соответствующем барабане, выполненном со спиральной канавкой, в лебедке, заменяющей каждую звездочку. Такая компоновка не требует использования противовесов.
Кроме того, по причинам безопасности необходимо изолировать каждую шахту, когда происходит перемещение платформы для предотвращения доступа людей или животных. Для этого шахта оснащена парапетом, проходящим по ее периметру, который опускается до уровня пола, перед тем как платформа будет приведена в движение. Парапет предпочтительно будет содержать надлежащим образом удерживаемую и приводимую в движение прямоугольную раму по периметру шахты, при этом раму крепят к цепям, прикрепленным к полу чуть ниже нахождения его плоскости. Цепи, которые предпочтительно перекрещиваются друг с другом, легко могут вытягиваться, когда рама поднимается, и могут быть собраны ниже рамы, когда последняя опускается, без необходимости использования соответствующих громоздких направляющих средств. Применение металлических цепей также обеспечивает возможность создания высокого электрического напряжения, приемлемого для того, чтобы не подпускать животных.
Также установлены электронные и электромагнитные устройства для возможности автоматического подъема подъемника 50 с целью его расположения на разных уровнях и для обеспечения поступательного перемещения тележек 14.
Кроме того, будут установлены устройства, обеспечивающие управление сооружением для парковки или хранения, его безопасность и эксплуатацию.
Такие устройства здесь не раскрыты, поскольку они известны квалифицированным специалистам в этой отрасли.



Изобретение относится к области строительства, а именно к конструкциям автостоянок. Изобретение позволит обеспечить более компактную конструкцию сооружения. Сооружение для хранения, содержит, по меньшей мере, одно базовое сооружение или модуль, каждое из которых включает подъемник с четырехугольной платформой и средствами для подъема и опускания платформы вдоль вертикальной шахты, так что платформа может занимать несколько положений, соответствующих разным уровням вдоль шахты, боксы, расположенные на каждом из разных уровней и установленные вокруг шахты. Одна сторона каждого бокса примыкает к соответствующей стороне шахты. В каждом боксе размещена имеющая колеса или опоры, взаимодействующие с направляющими, тележка, на которой расположен объект хранения, выполненная с возможностью непосредственного поступательного перемещения из своего бокса к платформе и, наоборот, в соответствии с направлением, перпендикулярным линии примыкания бокса и шахты. Платформа снабжена средствами для поступательного перемещения тележки и взаимно перпендикулярными направляющими для управления тележками, перемещающимися к какой-либо из сторон Колеса или опоры ориентируют в зависимости от соответствующих взаимно перпендикулярных направлений, вдоль которых тележки перемещаются от платформы и к платформе, расположенных параллельными рядами, так чтобы они соответствовали направляющим, установленным на платформе. Каждый из боксов снабжен своей собственной соответствующей тележкой, обслуживающей только один бокс. Тележки выполнены с возможностью их входа в подъемник и выхода из него посредством платформы на зарезервированном уровне, на котором объекты заходят на тележки или покидают их, когда тележки остаются на платформе. 20 з.п. ф-лы, 10 ил.
| US 5069592 A, 03.12.1991 | |||
| ЕР 1104831 А, 06.06.2001 | |||
| US 5118239 А, 02.06.1992 | |||
| US 3616945 А, 02.11.1971 | |||
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |

