Настоящее изобретение относится к области хранения биологических образцов, а именно к их извлечению и хранению. Речь идет о камере для извлечения и интеллектуальной системе доступа к пробам.
Эффективность передачи биологических проб при существующих технологиях слишком низка, а процессы извлечения и хранения не могут быть обеспечены по всей холодовой цепи. Конструктивное исполнение оборудования для хранения биологических проб при существующей технологии требует большого пространства и наличия нескольких емкостей для хранения. Переносить образцы или получить к ним доступ во время хранения неудобно, и процессы не могут быть обеспечены по всей холодовой цепи. Также невозможны линейная эксплуатация и контроль производства.
Сущность изобретения
Главной целью настоящего изобретения является создание камеры для извлечения проб, позволяющей решить проблемы, связанные с нерациональной конструкцией устройств для извлечения крышки емкости и контейнера для хранения проб в рамках существующего уровня техники. Современное оборудование занимает слишком много места, а также обладает недостаточной герметизацией и теплоизоляцией.
Другая цель настоящего изобретения заключается в создании интеллектуальной системы доступа к образцам для решения проблемы недостаточной гибкости системы доступа в рамках существующего уровня техники, когда стыковка, перенос или доступ к образцам из нескольких емкостей для хранения образцов неудобны и не могут быть обеспечены по всей холодовой цепи. Система доступа в рамках существующего уровня техники также не в состоянии обеспечить линейную эксплуатацию и контроль производства.
В настоящем изобретении применяется следующее техническое решение: камера для извлечения оснащена манипулятором со многими степенями свободы для перемещений по оси Z и системой транспортировки по оси X. Манипулятор со многими степенями свободы представляет собой механизм для перемещения на различные расстояния в несколько этапов по оси Z. Вышеописанный манипулятор оснащен захватом для реализации перемещения извлеченных проб по оси Z. Система транспортировки по оси X находится в положении, соответствующем захвату, и обеспечивает перемещение крышки или контейнера для хранения образцов, извлеченных с помощью захвата, в заданное положение.
Усовершенствование первое, манипулятор перемещается по двум уровням по оси Z и третьему - для транспортировки извлеченных проб в горизонтальном направлении. Третий уровень манипулятора находится над первым уровнем для перемещения по оси Z. Второй уровень расположен над третьим для перемещения по оси X. Захват для проб установлен на втором уровне для перемещения по оси Z и также может перемещаться вверх-вниз.
Усовершенствование второе, первый уровень манипулятора оснащен электрическими цилиндрами в качестве приводных элементов А и В, направляющими А и В для перемещения по оси Z. Третий уровень манипулятора оснащен направляющей С и электрическим цилиндром С в качестве приводных элементов. Вышеуказанные направляющие А и В выровнены вертикально по оси Z в камере для извлечения. Концы вышеуказанной направляющей С располагаются на направляющих А и В для перемещения по оси Z. Электрические цилиндры А и В располагаются на концах направляющей С для перемещения вверх-вниз. Второй уровень манипулятора устанавливается на направляющей С и использует электрический цилиндр С в качестве приводного элемента. Второй уровень также оснащен электрическим цилиндром D с подъемным устройством для перемещения вверх-вниз.
Усовершенствование третье, система транспортировки по оси X состоит из элементов для перемещения и хранилища для крышек емкостей для хранения образцов. Хранилище для крышек располагается перпендикулярно элементам для перемещения. При помощи элементов для перемещения крышки или контейнеры для хранения образцов, извлеченные захватом, могут перемещаться в хранилище для крышек либо в заданное положение.
Усовершенствование четвертое, элементы для перемещения и хранилище для крышек системы транспортировки располагаются по обеим сторонам манипулятора со многими степенями свободы на оси X. При помощи элементов для перемещения крышки или контейнера для хранения образцов, извлеченных захватом, могут перемещаться в хранилище для крышек либо в заданное положение. Элементы для перемещения включают: опору, электродвигатель, движущуюся пластину и направляющий стержень. Опора системы транспортировки фиксируется с одной стороны под многоуровневым манипулятором. Электродвигатель и направляющий стержень фиксируются на опоре. Движущаяся пластина располагаются в нижней части электродвигателя и приводятся в движение направляющим стержнем. Движущаяся пластина способна перемещаться между противоположными концами многоуровневого манипулятора рядом с хранилищем для крышек. На поверхности хранилища для крышек, рядом с элементами движущейся пластины, должно быть приемное отверстие.
Усовершенствование пятое, предусматривается система приема по оси Y. Вышеуказанная система приема осуществляет транспортировку контейнеров для хранения образцов в соответствующее положение системы транспортировки по оси Х.
Усовершенствование шестое, система приема по оси Y включает направляющую, движущийся лоток и канал приема контейнеров для хранения образцов. Направляющая располагается вдоль оси Y и под опорой системы транспортировки по оси Х. Вышеуказанный канал приема контейнеров для хранения образцов располагается на направляющей и на определенном отрезке по оси Х. Движущийся лоток устанавливается в канале приема контейнеров для хранения образцов для перемещения по оси Х.
Усовершенствование седьмое, система приема по оси Y дополнительно оснащена элементами для перемещения контейнеров для хранения образцов. Элементы для перемещения располагаются в соответствующем месте канала приема, приводя в движение лоток.
Усовершенствование восьмое, элементы для перемещения контейнеров для хранения образцов включают электродвигатель и движущиеся пластинчатые элементы. Электродвигатель устанавливается на нижнем конце опоры, как и движущиеся пластинчатые элементы. Движущиеся пластинчатые элементы перемещаются по оси Х при помощи электродвигателя.
Усовершенствование девятое, движущиеся пластинчатые элементы для перемещения контейнеров для хранения образцов состоят из двух пластин и движущейся головки. Верхняя поверхность первой пластины может перемещаться по нижней поверхности опоры. Торцевые поверхности первой и второй пластин фиксируются под прямым углом. Противоположная торцевая поверхность второй пластины фиксируется под прямым углом с движущейся готовкой. Движущиеся пластинчатые элементы образуют перевернутую букву «Z».
Усовершенствование десятое, система приема по оси Y дополнительно оснащена электродвигателем, ходовым винтом и приемной гайкой канала приема контейнеров для хранения образцов. Вращение торцевого конца ходового винта осуществляется при помощи электродвигателя. Противоположный конец винта располагается на конце направляющей по оси Y, удаленном от опоры. Приемная гайка фиксируется на торцевом конце канала приема контейнеров для хранения образцов. Ходовой винт и приемная гайка соединены между собой. Электродвигатель устанавливается под соединением первой и второй пластин. Канал приема перемещается в соответствующее положение относительно движущейся головки.
Усовершенствование одиннадцатое, система приема по оси Y также укомплектована элементом низкотемпературной защиты, который располагается под каналом приема контейнеров для хранения образцов либо закреплен на нижней торцевой поверхности канала. Внутренняя часть элемента представляет собой полость, а на верхней торцевой поверхности проделаны выпускные отверстия для азота, сообщающиеся с полостью. Элемент низкотемпературной защиты соединен с трубопроводом подачи азота.
Усовершенствование двенадцатое, элемент низкотемпературной защиты имеет форму короба, цилиндра или полусферы.
Усовершенствование тринадцатое, хранилище для крышек состоит из корпуса и элементов привода. На поверхности хранилища для крышек, рядом с движущимися пластинчатыми элементами, должно быть приемное отверстие. На поверхности корпуса хранилища, рядом с захватом, проделано отверстие для извлечения крышек.
Перемещение корпуса хранилища по оси Х осуществляется при помощи элементов привода.
Усовершенствование четырнадцатое, элементы привода включают опору, направляющие и соединительную стойку. Опора фиксируется в камере для извлечения снизу в противоположной стороне от манипулятора. Направляющие фиксируются на вышеуказанной опоре. Одна сторона соединительной стойки располагается на направляющей, обеспечивая возможность перемещения, а другой - закреплена на корпусе.
Усовершенствование пятнадцатое, опора устанавливается над корпусом хранилища для крышек, а направляющие располагаются симметрично по сторонам верхней торцевой поверхности опоры. На противоположных от направляющих сторонах верхней торцевой поверхности опоры оборудованы направляющие каналы по оси Х.
Вышеописанная соединительная стойка состоит из скользящей пластины и двух зажимов. Скользящая пластина располагается на направляющих для обеспечения перемещения. Верхний конец первого зажима закрепляется вертикально на одной из боковых сторон скользящей пластины, а нижний - через канал на поверхности корпуса хранилища для крышек. Верхний конец второго зажима закрепляется вертикально на противоположной стороне скользящей пластины, а нижний - через противоположную сторону канала на поверхности корпуса хранилища для крышек.
Усовершенствование шестнадцатое, конструкцией предусмотрено наличие элементов системы возврата контейнеров для хранения образцов. Элементы системы возврата располагаются на противоположной стороне от системы транспортировки. Вышеуказанные элементы включают движущуюся пластину, перемещающуюся по оси Х.
Усовершенствование семнадцатое, элементы системы возврата включают опорную пластину и электродвигатель.
Опорная пластина размещается под корпусом хранилища для крышек на противоположной стороне от элементов для перемещения. Движущаяся пластина перемещается по опорной пластине при помощи электродвигателя. На одной из боковых сторон движущейся пластины устанавливается движущаяся головка.
Усовершенствование восемнадцатое, захват оснащен магнитом с положительным полюсом. На крышке контейнера и корзине устанавливаются магниты с отрицательным.
Усовершенствование восемнадцатое, манипулятор со многими степенями свободы для извлечения образцов дополнительно перемещается по оси Х, которое обеспечивается на втором уровне перемещения по оси Z. На втором уровне также возможно перемещение манипулятора вверх-вниз по оси Z. Захват располагается на уровне перемещения по оси Х, причем пальцы захвата с обеих сторон могут раздвигаться. На торцевой поверхности крышки контейнера находятся приемные канавки, обеспечивающие извлечение пальцами захвата по оси Х. Возможно ограниченное извлечение пальцами захвата при помощи приемных канавок по оси Z.
Усовершенствование девятнадцатое, предусматривается элементы стыковки передаточной системы в вышеописанной камере для извлечения емкости для хранения образцов.
Герметизация камеры для извлечения располагается на верхней поверхности емкости для хранения образцов. В камере для извлечения предусматривается герметичный стыковочный порт. Элементы стыковки передаточной системы располагаются на внешней стороне емкости для хранения образцов для приема транспортировочных боксов таким образом, чтобы отверстие в боксе стыковалось с герметичным портом.
Усовершенствование двадцатое, элементы стыковки передаточной системы включают движущуюся направляющую, мини-тележку и элементы привода. Движущаяся направляющая находится с наружной стороны емкости для хранения образцов, а мини-тележка перемещает по ней транспортировочные боксы. Элементы привода осуществляют перемещение боксов и герметичную стыковку отверстия бокса с портом.
Усовершенствование двадцать первое, движущаяся направляющая имеет С-образную, U-образную или вогнутую форму.
Усовершенствование двадцать второе, элементы привода включают электродвигатель, вертикальную направляющую и подъемную платформу, которая движется по направляющей при помощи электродвигателя.
Движущаяся направляющая располагается на верхней части вертикальной направляющей, образуя Т-образную конструкцию либо конструкцию в виде перевернутой L. Одна часть движущейся направляющей проходит через подъемную платформу.
Верхняя часть подъемной платформы представляет собой два свободных незакрепленных конца, оснащенных приемными пластинами. Между приемными пластинами установлена опорная пластина. Транспортировочный бокс может располагаться или устанавливаться на опорной пластине.
Усовершенствование двадцать третье, мини-тележка состоит из каркаса, аккумулятора и соединительной панели электрических элементов.
Нижняя поверхность каркаса мини-тележки располагается на направляющей, которая устанавливается на движущейся направляющей. Аккумулятор мини-тележки размещается в нижней части каркаса и подключается к соединительной панели. В нижней части каркаса мини-тележки размещается движущаяся направляющая и контактная пластина источника питания, установленная в соответствующем месте соединительной панели.
Усовершенствование двадцать четвертое, мини-тележка дополнительно оснащена датчиком расстояния, микроконтроллером, электродвигателем и колесами. Датчик расстояния устанавливается на нижней поверхности каркаса мини-тележки. Микроконтроллер и датчик расстояния подключены к электродвигателю. Колеса мини-тележки перемещаются по движущейся направляющей при помощи электродвигателя.
Усовершенствование двадцать пятое, рельсовый путь состоит из двух направляющих и опорной пластины движущейся тележки. Направляющие располагаются по двум сторонам верхней поверхности опорной пластины. Две группы направляющих мини-тележки располагаются на нижней поверхности каркаса. Группы направляющих мини-тележки перемещаются по двум направляющим. Контактная пластина источника питания устанавливается на опорной пластине движущейся тележки. На опорной пластине устанавливаются колодки, при помощи которых перемещаются колеса.
Усовершенствование двадцать шестое, верхняя поверхность каркаса мини-тележки оснащена фиксирующей стойкой, для которой в соответствующем месте на приемной пластине выполнено отверстие для позиционирования.
Усовершенствование двадцать седьмое, камера для извлечения дополнительно оборудована устройством для открывания крышек, которое располагается напротив герметичного порта для стыковки. Устройство для открывания крышек применяется для открывания крышек транспортировочных боксов, находящихся на входе в герметичный порт.
Усовершенствование двадцать восьмое, конструкция устройства для открывания крышек предусматривает неподвижную опору, элементы привода, большую и малую стрелы, а также поддон для крышек. Неподвижная опора устанавливается в камере для извлечения, а элементы привода располагаются на опоре. Большая стрела устанавливается одним концом на неподвижной опоре с возможностью вращения. Малая стрела одним концом устанавливается на противоположной стороне большой стрелы с возможностью вращения. Второй конец малой стрелы фиксируется на поддоне для крышек. Малая стрела приводится в движение при помощи элементов привода.
Усовершенствование двадцать девятое, поддон для крышек состоит из собственно поддона, фиксирующей стойки и магнита.
Поддон и один конец малой стрелы фиксируются, и на поддоне устанавливаются фиксирующая стойка и магнит. На крышке транспортировочного бокса выполняется отверстие для позиционирования для контакта с фиксационной стойкой поддона. Магнит с отрицательным полюсом на крышке транспортировочного бокса и магнит с положительным полюсом на поддоне взаимно притягиваются.
Усовершенствование тридцатое, элементы привода устройства для открывания крышек включают электродвигатель, направляющую и каретку. Каретка движется вверх-вниз по направляющей при помощи электродвигателя. Она оснащена выдвинутым наружу валом, один конец которого может вращаться либо фиксируется на малой стреле.
Усовершенствование тридцать первое, конструкция емкости для хранения образцов предусматривает корпус, встроенный резервуар для жидкого азота, вращающуюся панель, элементы вала, электродвигатель, корзину и крышку. Крышка устанавливается на верхней поверхности корпуса, а резервуар для жидкого азота - внутри корпуса. На верхней поверхности резервуара для азота находится вращающийся приемный бак. Вращение элементов вала осуществляется электродвигателем. Вращающийся нижний конец элементов вала располагается на приемном баке. На элементах вала фиксируется вращающаяся пластина, на которой устанавливается корзина. Элементы вала включают центральный и приемный валы. Центральный вал вращается при помощи электродвигателя. Внутренняя полость центрального вала заполняется азотом. Нижний конец центрального вала и приемный вал соединены соосно, причем вращающийся нижний конец приемного вала располагается на приемном баке.
Усовершенствование тридцать второе, для стенок корпуса емкости для хранения образцов предусмотрен термоизоляционный слой.
Усовершенствование тридцать третье, камера для извлечения дополнительно оснащено устройством для разморозки и сканером кодов. Устройство для разморозки устанавливается рядом с герметичным приемным портом, а сканер кодов - рядом с устройством для разморозки.
Усовершенствование тридцать четвертое, камера для извлечение также оборудовано смотровым окном и съемной дверью.
Положительные результаты настоящего изобретения включают Манипулятор со многими степенями свободы и систему транспортировки, причем манипулятор используется для перемещения проб на различные расстояния по оси Z в несколько этапов, что значительно увеличивает размеры зоны перемещения. Дополнительно предусмотренная система транспортировки обеспечивает перемещение крышки емкости или контейнера для хранения образцов по оси Х. Одновременное перемещение по осям Z и Х обеспечивает синхронизацию рабочего пространства. Оптимизированная конструкция обеспечивает экономию места, сравнительно небольшую себестоимость, удобство и автоматизацию управления, достаточную герметизацию и теплоизоляцию.
Еще одним положительным результатом настоящего изобретения является обеспечение работы интеллектуальной системы доступа к образцам по всей холодовой цепи. Извлечение и хранение проб осуществляется несколькими состыкованными устройствами, формируя производственную линию извлечения и хранения. Одновременно повышаются эффективность доступа и удобство управления производственной линией извлечения и хранения образцов.
Краткое описание чертежей
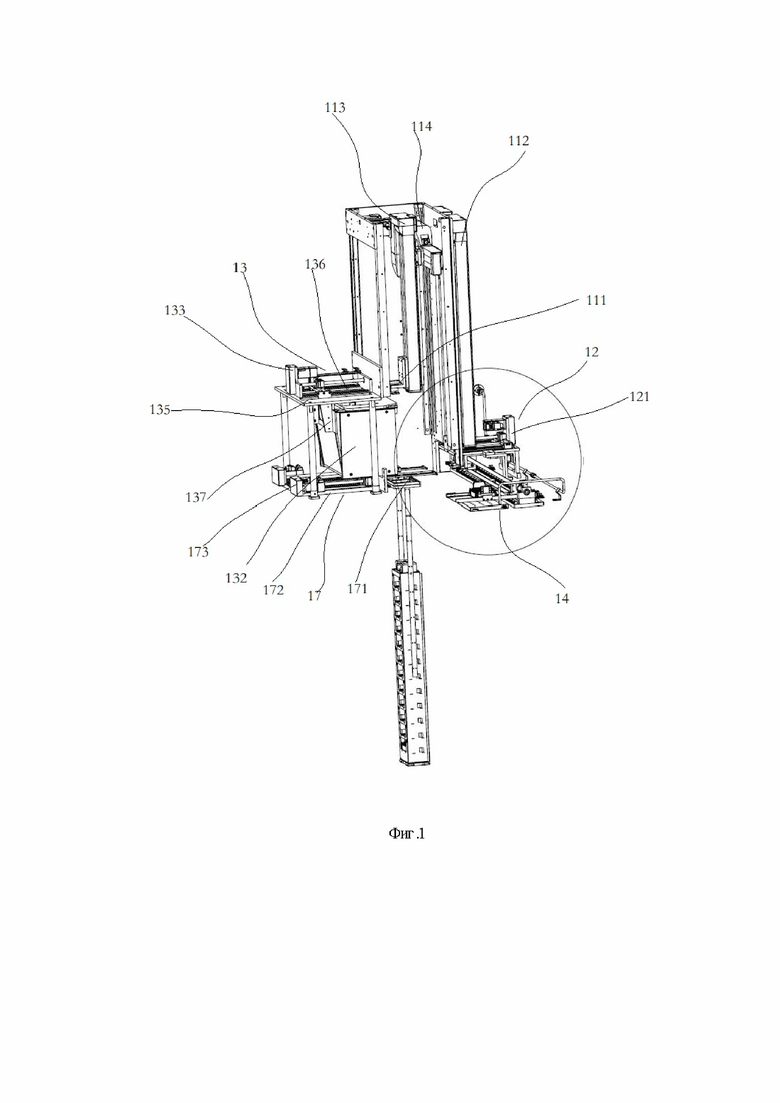
Конструкция многоуровневого манипулятора см. фиг. 1;
Конструкция системы транспортировки и элементов перемещения см. фиг. 2 (частично на детальных схемах фиг. 1);
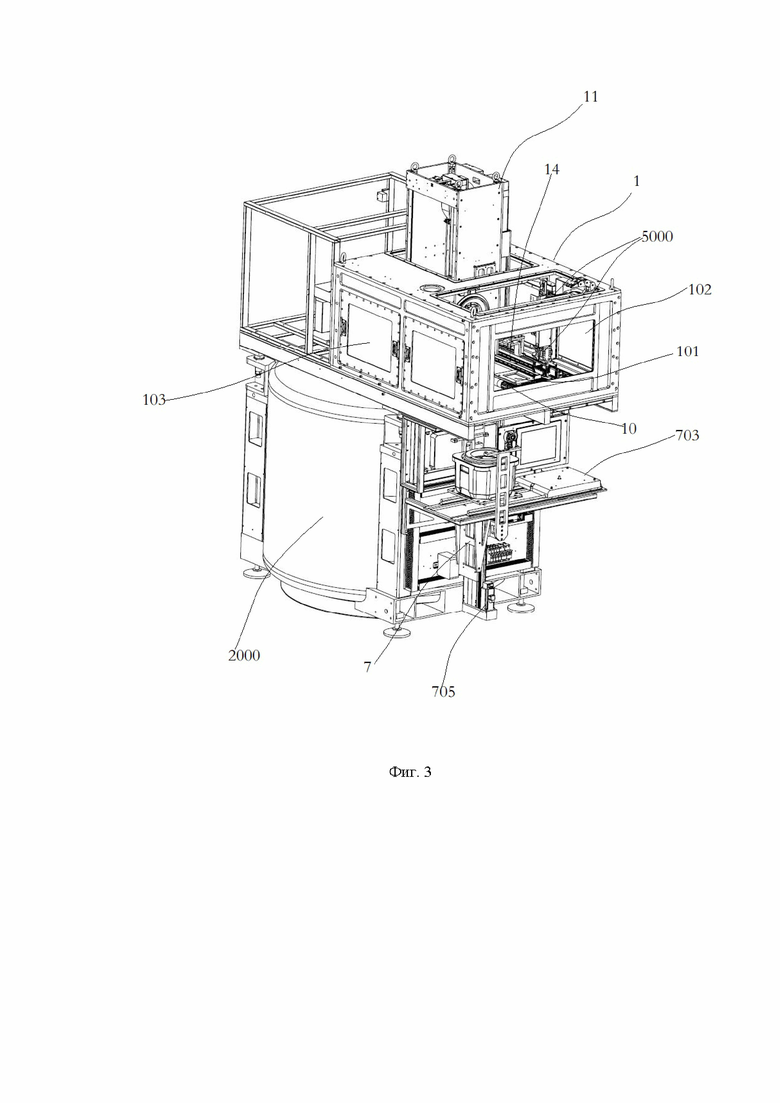
Конструкция интеллектуальной системы доступа к образцам см. фиг. 3;
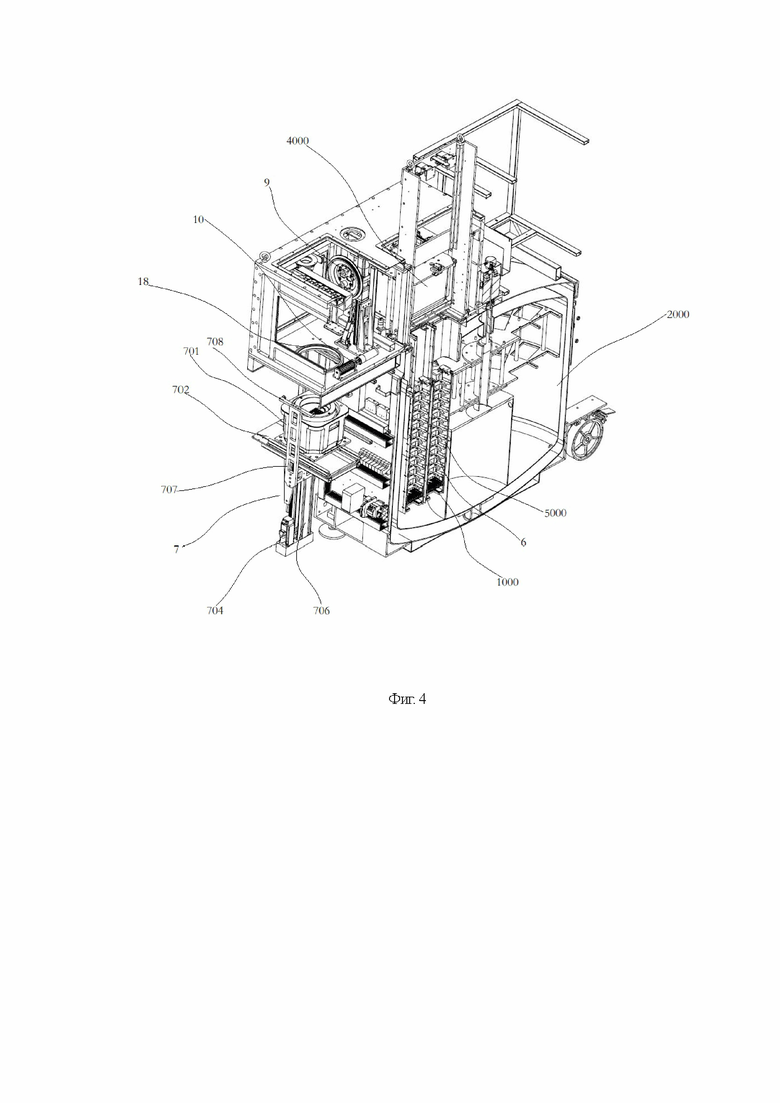
Фиг. 4 представляет собой полуразрез фиг. 3;
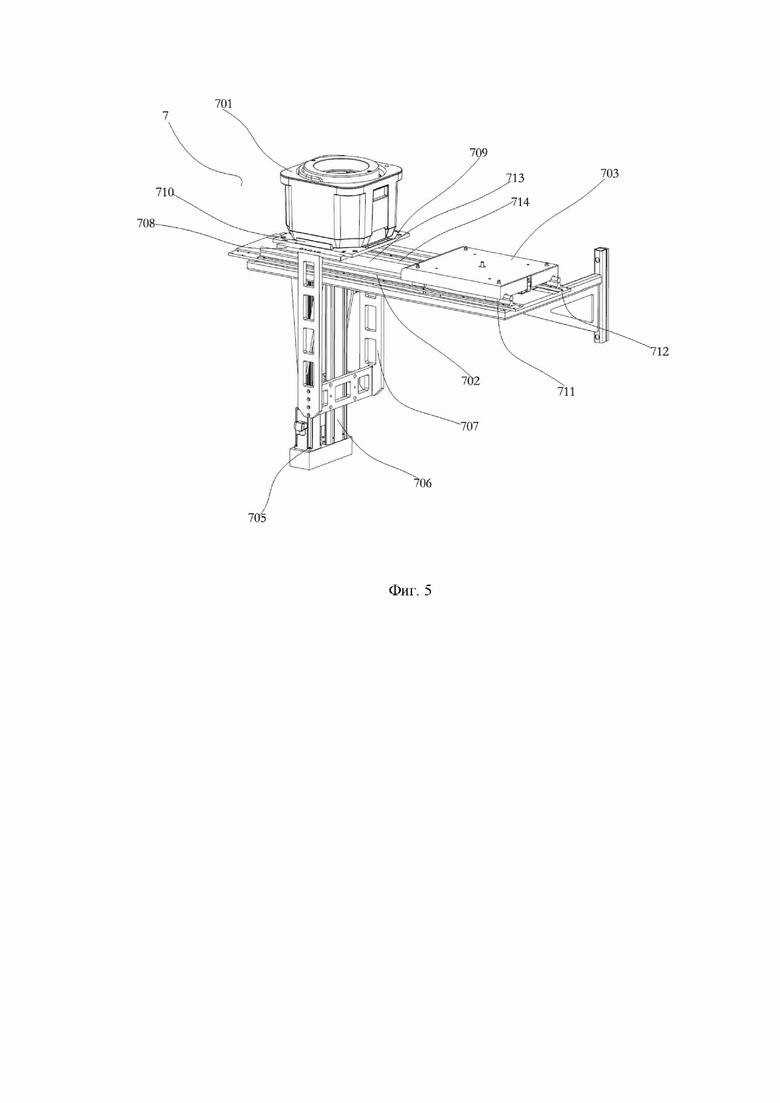
Конструкция элементов стыковки передаточной системы см. фиг. 5;
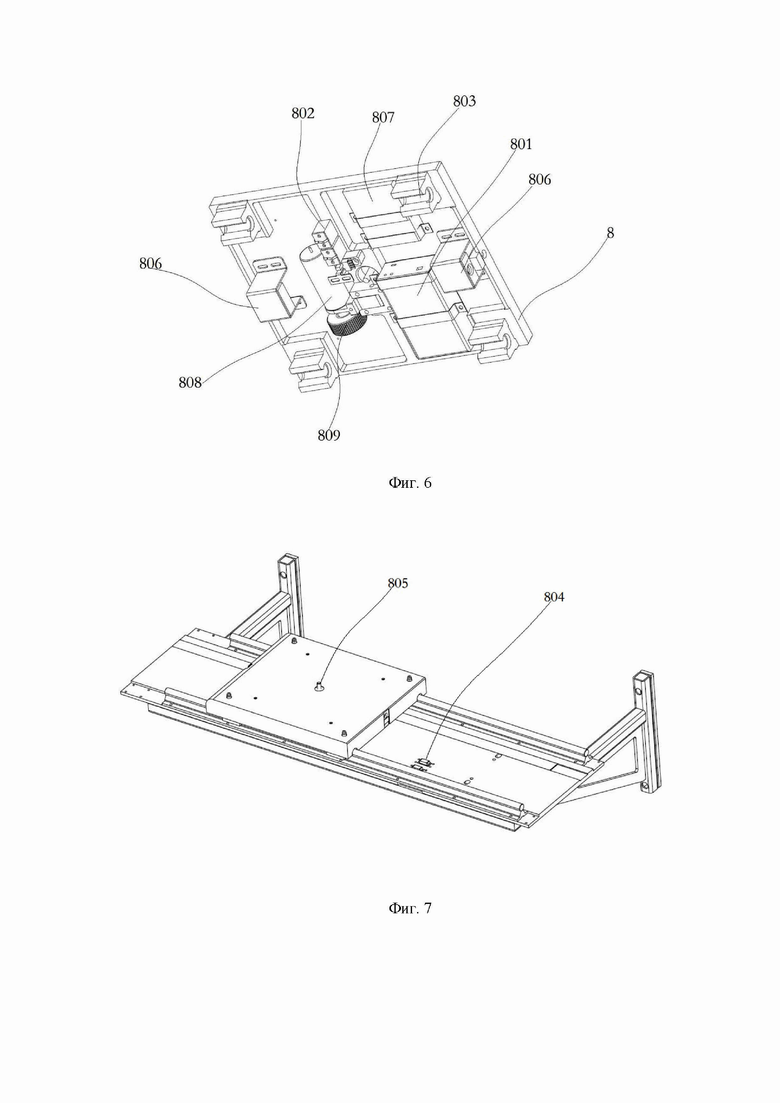
Конструкция передвижной мини-тележки см. фиг. 6;
Конструкция передвижной мини-тележки на рельсовом пути см. фиг. 7;
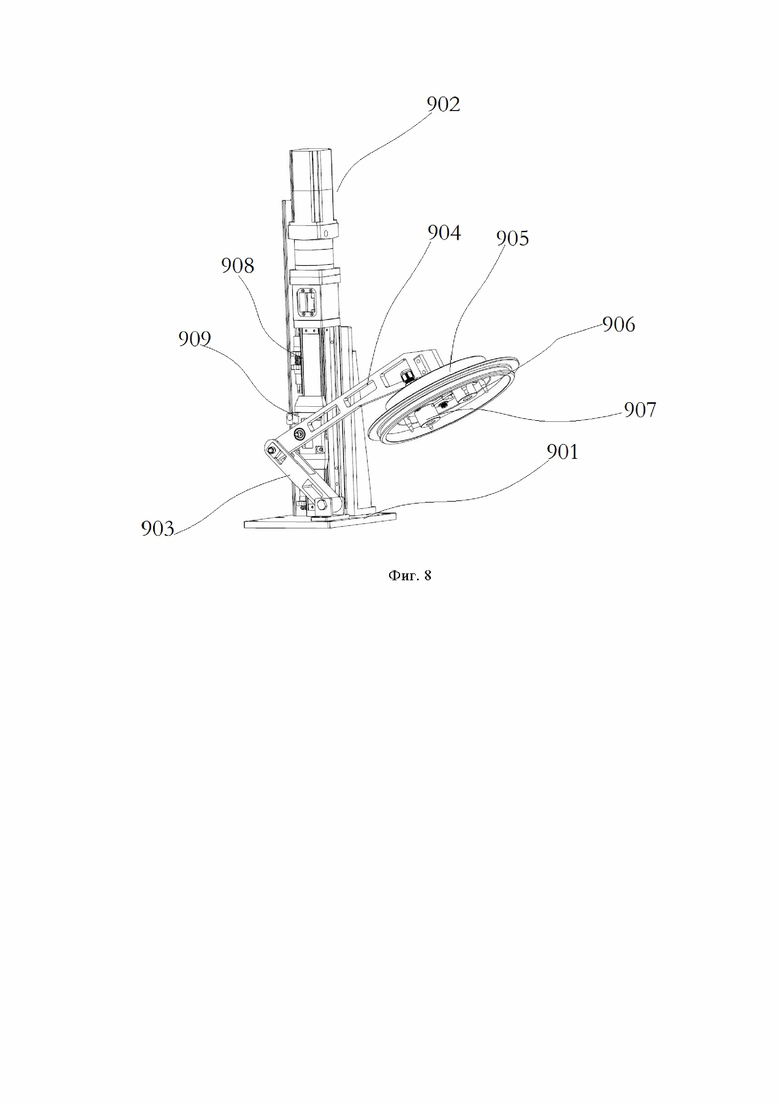
Конструкция устройства для снятия крышек см. фиг. 8;
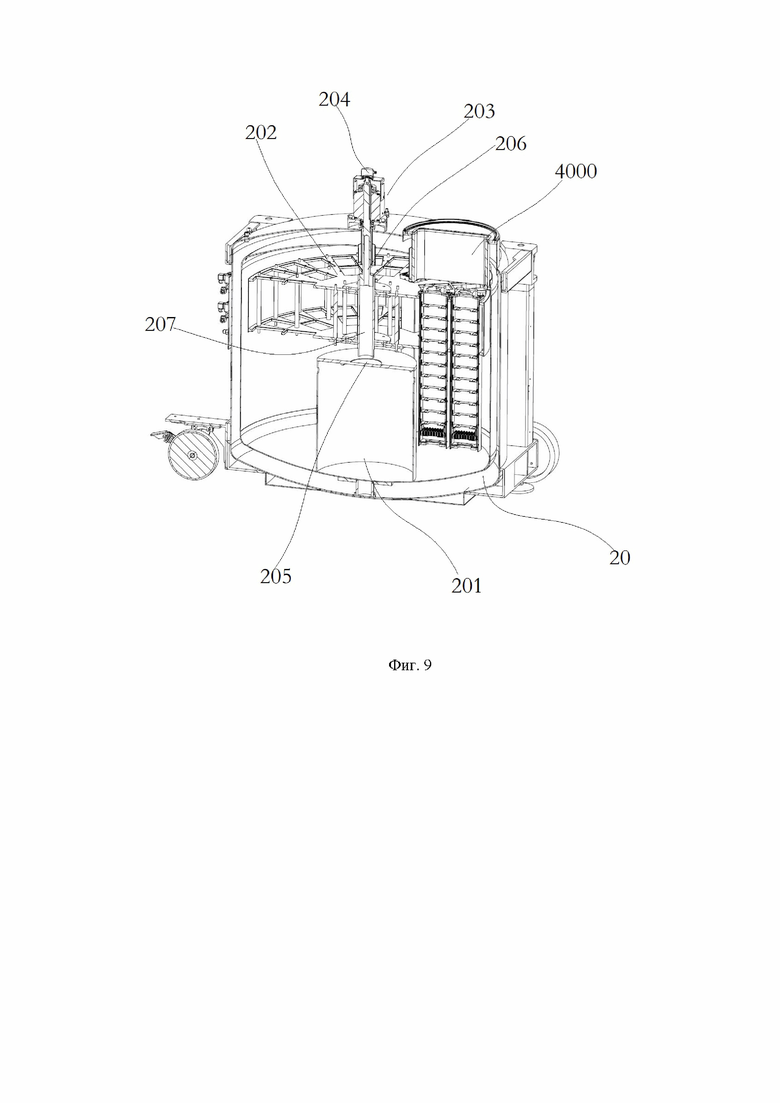
Конструкция емкости для хранения образцов см. полуразрез на фиг. 9;
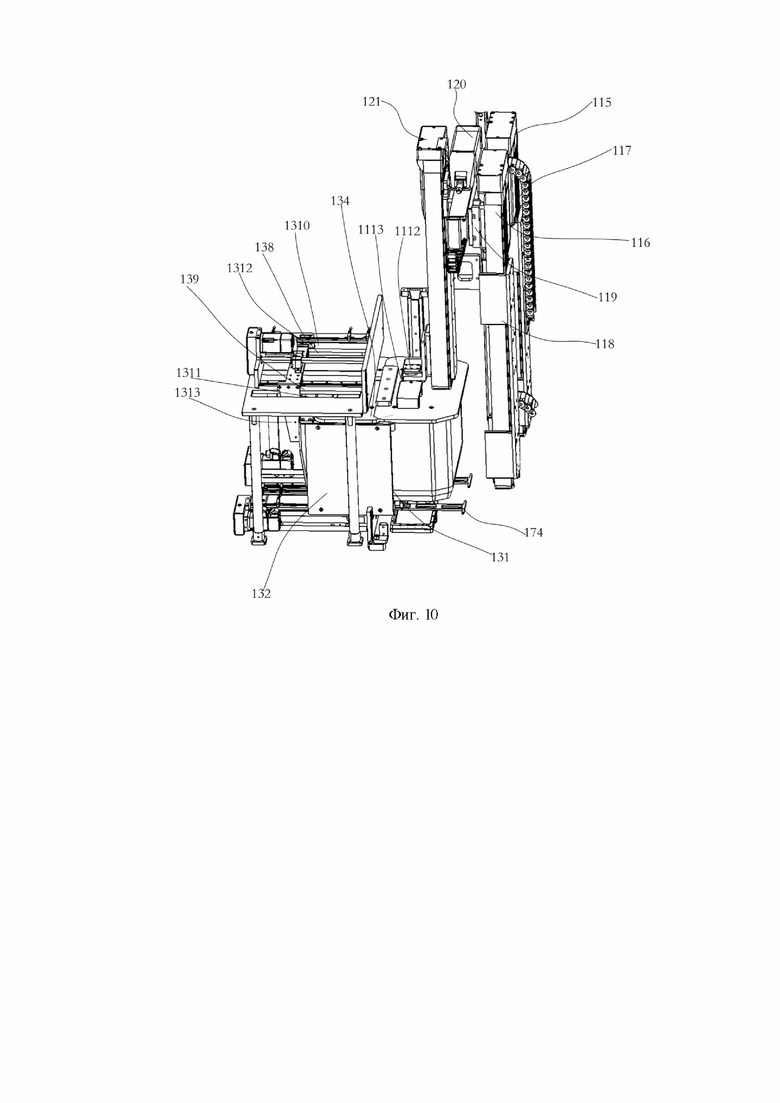
Конструкция захвата и хранилища для крышек см. фиг. 10;
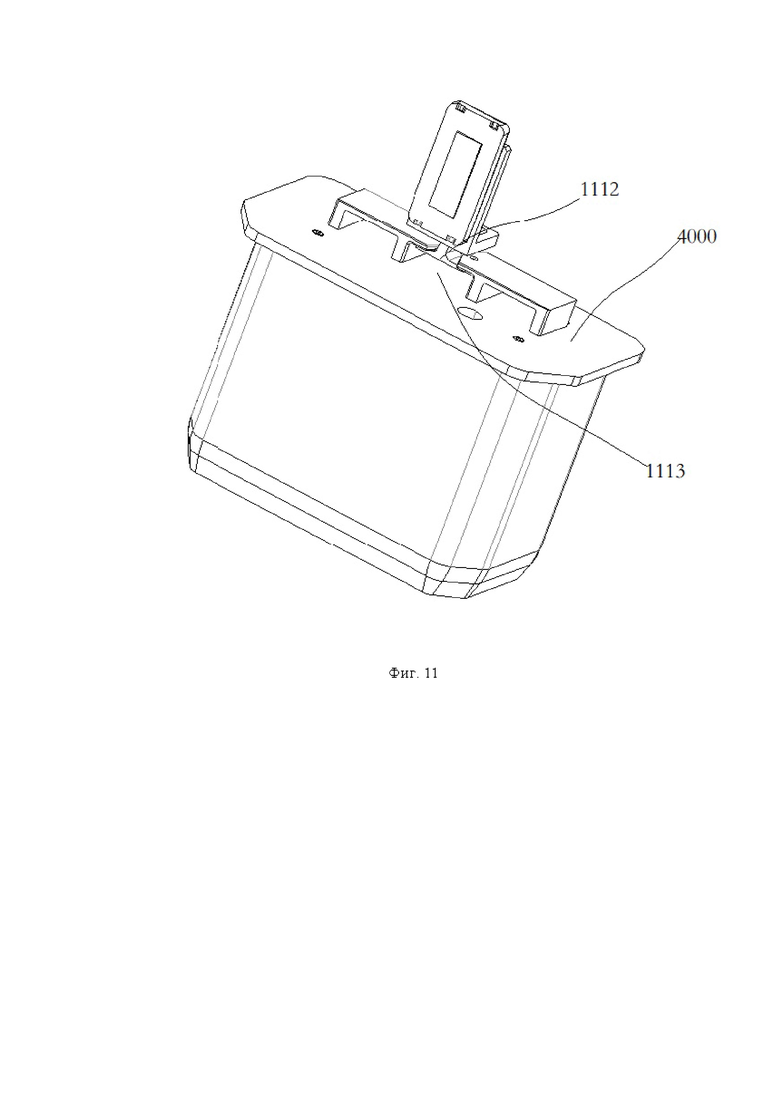
Конструкция пальцев захвата и канала приема см. фиг. 11.
Обозначение позиций на чертежах:
1 - Камера для извлечения;
11 - Манипулятор со многими степенями свободы;
111 - Захват;
1112 - Пальцы захвата;
1113 - Приемный канал;
112 - Первый уровень извлечения по оси Z;
113 - Второй уровень извлечения по оси Z;
114 - Третий уровень приема по горизонтали;
115 - Электрический цилиндр привода А по оси Z;
116 - Электрический цилиндр привода А по оси Z;
117 - Направляющая A по оси Z;
118 - Направляющая B по оси Z;
119 - Направляющая привода C;
120 - Электрический цилиндр привода C;
121 - Электрический цилиндр привода D по оси Z;
12 - Система транспортировки по оси Х;
121 - Элементы для перемещения по оси X;
122 - Опора системы транспортировки;
123 - Электродвигатель системы транспортировки;
124 - Движущаяся пластина по оси Х;
125 - Направляющий стержень;
13 - Хранилище для крышек емкостей;
131 - Приемное отверстие;
132 - Корпус хранилища для крышек емкостей;
133 - Элементы привода хранилища для крышек;
134 - Отверстие для извлечения крышек емкостей;
135 - Опора хранилища;
136 - Рельсовый путь хранилища;
137 - Соединительная пластина хранилища;
138 - Первая рельсовая направляющая хранилища;
139 - Вторая рельсовая направляющая хранилища;
1310 - Направляющий канал;
1311 - Скользящая пластина хранилища;
1312 - Первая пластина привода хранилища;
1313 - Вторая пластина привода хранилища;
14 - Система приема по оси Y;
141 - Направляющая по оси Y;
142 - Направляющий лоток для перемещения по оси Y;
143 - Канал приема контейнеров;
144 - Электродвигатель по оси Y;
145 - Винт вала по оси Y;
146 - Приемная гайка канала приема контейнеров;
15 - Элементы для перемещения контейнеров;
151 - Электродвигатель для перемещения контейнеров;
152 - Пластинчатый элемент для перемещения контейнеров;
153 - Первая пластина для перемещения контейнеров;
154 - Вторая пластина для перемещения контейнеров;
155 - Направляющая головка;
16 - Элемент низкотемпературной защиты;
161 - Отверстие для азота;
17 - Элементы системы возврата контейнеров;
171 - Движущаяся пластина;
172 - Опорная пластина элементов системы возврата;
173 - Электродвигатель;
174 - Направляющая головка;
18 - Герметичный порт приема;
1000 - Контейнер для хранения образцов;
2000 - Емкость для хранения образцов;
3000 - Корзина;
4000 - Крышка;
5000 - Захват;
6 - Приемный лоток для корзин;
7 - Элементы стыковки передаточной системы;
701 - Транспортировочный бокс;
702 - Движущаяся направляющая;
703 - Передаточная мини-тележка;
704 - Элементы привода для стыковки;
705 - Электродвигатель для стыковки;
706 - Вертикальная направляющая для стыковки;
707 - Подъемная платформа для стыковки;
708 - Подъемная приемная пластина;
709 - Подъемная опорная пластина;
710 - Ограничительная пластина передаточного контейнера;
711 - Первая направляющая;
712 - Вторая направляющая;
713 - Опорная пластина мини-тележки;
714 - Колодки;
8 - Каркас мини-тележки;
801 - Аккумулятор мини-тележки;
802 - Соединительная пластина аккумулятора;
803 - Направляющая скольжения мини-тележки;
804 - Контактная пластина источника питания;
805 - Фиксирующая стойка мини-тележки;
806 - Датчик расстояния;
807 - Микроконтроллер;
808 - Электродвигатель мини-тележки;
809 - Колесо мини-тележки;
9 - Устройство для открывания крышек;
901 - Неподвижная опора устройства;
902 - Элементы привода;
903 - Большая стрела;
904 - Малая стрела;
905 - Поддон;
906 - Фиксирующая стойка;
907 - Магнит;
908 - Направляющая;
909 - Каретка;
20 - Корпус емкости для хранения образцов;
201 - Корпус встроенного резервуара для жидкого азота;
202 - Вращающаяся пластина;
203 - Элементы вала емкости для хранения образцов;
204 - Электродвигатель;
205 - Приемный бак;
206 - Центральный вал;
207 - Приемный вал;
10 - Устройство для разморозки;
101 - Сканер кодов;
102 - Смотровое окно;
103 - Съемная дверь.
Конкретизация способов реализации
Техническое решение настоящего изобретения будет более подробно описано ниже со ссылкой на примеры реализации и чертежи.
После извлечения биологических образцов их хранят в пробирках для криоконсервации. Несколько пробирок для криоконсервации равномерно размещаются в контейнере для хранения (1000). В емкости для хранения образцов (2000) при низкой температуре хранятся множество контейнеров для хранения (1000). Емкость для хранения образцов (2000) снабжена корзиной (3000), а несколько контейнеров (1000) хранятся в корзине (3000) для удобства доступа. Низкотемпературная среда существующей емкости (2000) для хранения проб формируется за счет подачи азота, то есть резервуара с жидким азотом. При извлечении пробирок для криоконсервации биологических образцов из емкости (2000) сначала открывается крышка (4000), извлекается контейнер (1000) из корзины, помещается в транспортировочный бокс (701) для транспортировки. Здесь следует отметить, что важна герметичность крышки (4000). Чтобы обеспечить низкую температуру в емкости (2000), во время извлечения можно настроить устройство для открывания крышки. Открывается емкость (2000) и вытаскивается корзина (3000), а из нее достается целевая пробирка. Процесс размещения на хранение - это процесс, обратный описанному выше, не нуждается в повторном описании.
Пример 1
В описанном выше рабочем процессе настоящего изобретения раскрывается камера для извлечения (1), которая может обеспечить извлечение крышки (4000) емкости (2000) в герметичной среде с низкой температурой. После открытия крышки, пробирка для криоконсервации извлекается из корзины (3000). Одновременное перемещение по осям Z и Х обеспечивает синхронизацию рабочего пространства. Оптимизированная конструкция обеспечивает экономию места, сравнительно небольшую себестоимость, удобство и автоматизацию управления, достаточную герметизацию и теплоизоляцию.
В настоящем варианте реализации предусмотрено камера для извлечения, которое включает в себя манипулятор со многими степенями свободы для извлечения по оси Z (11) и систему транспортировки по оси X (12). Манипулятор со многими степенями свободы (11) представляет собой подвижное устройство, которое может выполнять перемещение в несколько этапов по оси Z, оборудовано захватом (111) для перемещения по оси Z. Система транспортировки по оси X (12) устанавливается в положении, соответствующем захвату (111) и может извлекать пробу из захвата (111) путем снятия крышки (4000) емкости (2000) или контейнера для хранения (1000) и доставлять в заданное положение.
Манипулятор со многими степенями свободы для извлечения по оси Z (вертикальное направление позиционирования по оси Z в этом варианте реализации аналогично описанному ниже и не нуждается в повторении) может представлять собой механическую руку либо подъемную стрелу, выбор устройства здесь не ограничивается. Манипулятор, способный перемещаться на заданное расстояние в несколько этапов, является областью защиты данного изобретения: комбинация манипулятора для извлечения по оси Z (11) и системы транспортировки по оси Х (12) значительно экономит занимаемое место, способствует снижению себестоимости, обеспечивает удобство и автоматизацию эксплуатации, а также необходимые герметичность и термоизоляцию. Существует множество известных манипуляторов с тремя степенями свободы, которые не только занимают много места, но и имеют недостаточную герметизацию и теплоизоляцию.
В настоящем варианте реализации раскрывается вариант исполнения манипулятора (11): манипулятор со многими степенями свободы для извлечения по оси Z (11) содержит первый уровень (112), второй уровень (113) и принимающий горизонтальный уровень (114).
Горизонтальный уровень (114) установлен на первом уровне (112) по оси Z, который может приводить в движение принимающий горизонтальный уровень для перемещения по оси Z. Второй уровень (113) для извлечения по оси Z установлен на принимающем горизонтальном уровне (114). Принимающий горизонтальный уровень может приводить в движение второй уровень для перемещения по оси X. Захват (111) устанавливается на втором уровне (113), который может приводить в движение захват для перемещения вверх-вниз по оси Z. Первый уровень может приводить в движение принимающий горизонтальный уровень для перемещения по оси Z, то есть в вертикальном направлении. Таким образом, принимающий горизонтальный уровень может также приводить в движение второй уровень для вертикального перемещения в рабочей секции перемещения первого уровня. Второй уровень сам по себе имеет рабочий сегмент вертикального перемещения по оси Z, таким образом, в вертикальном направлении по оси Z образуются два вертикальных рабочих сегмента, что значительно увеличивает глубину и продолжительность работы в вертикальном направлении. Кроме того, перемещение второго уровня горизонтально по оси X может быть реализовано посредством обеспечения принимающего горизонтального уровня, обеспечивая перемещение второго уровня по оси Z и по оси X. Такая конструкция не занимает много места, обладает высокой устойчивостью и широким диапазоном рабочих расстояний.
Для улучшения взаимодействия с системой транспортировки по оси X, в настоящем варианте реализации дополнительно раскрывается более конкретный способ многоуровневого манипулятора для извлечения по оси Z: первый уровень манипулятора оснащен электрическим цилиндром привода А (115), электрическим цилиндром привода В (116), направляющей A (117) и направляющей В (118). Принимающий горизонтальный уровень (114) оснащен направляющей привода C (119) и электрическим цилиндром привода C (120).
Направляющая A (117) и направляющая B (118) закреплены вертикально и симметрично по оси Z в камере для извлечения (1). Соответственно, концы направляющей привода C (119) расположены с возможностью скольжения на направляющей A и направляющей B. Электрический цилиндр привода А и электрический цилиндр привода В соответственно приводят в движение концы направляющей привода C (119). Направляющая A (117) и направляющая В (118) расположены симметрично, и пространство между ними может быть рабочим пространством системы транспортировки по оси X (12). Таким образом, положение системы транспортировки по оси X (12) может быть установлено в соответствии с положением захвата, такое конструктивное решение является наиболее рациональным. После того, как захват извлекает крышку (4000) емкости (2000), положение извлечения соответствует направляющим A и В по оси Z, так что система транспортировки по оси X перемещает крышку в заданное положение или в хранилище.
Второй уровень манипулятора установлен с возможностью скольжения на направляющей привода C (119), и Электрический цилиндр привода C (120) приводит его в движение. Второй уровень манипулятора (113) для извлечения по оси Z приводится в движение электрическим цилиндром привода D (121) для перемещения подъемного элемента 11 вверх-вниз.
Манипулятор со многими степенями свободы (11) для извлечения по оси Z располагается на емкости для хранения образцов (2000) и используется для извлечения крышки или корзины: Электрический цилиндр A (115) и электрический цилиндр В (116) приводят направляющую привода C (119) в движение вниз, тем самым приводя в движение второй уровень извлечения по оси Z (113), расположенный на направляющей привода C (119). Электрический цилиндр привода C может также приводить в движение второй уровень для извлечения по оси Z для перемещения в горизонтальном направлении по направляющей привода С. Для того, чтобы захват, расположенный на втором уровне, перемещался в горизонтальном направлении в заданное положение. После перемещения первого уровня, для удовлетворения потребностей в более глубоком извлечении, устанавливается второй уровень, который опускается вниз по оси Z с помощью электрического цилиндра D, подъемный элемент перемещается вниз и осуществляет снятие крышки емкости для хранения образцов.
Ниже описаны два варианта реализации захвата, один из которых заключается в следующем: захват (111) снабжен магнитом с положительным полюсом; торцевая поверхность крышки снабжена магнитом с отрицательным, и верхняя поверхность корзины снабжена магнитом с отрицательным. Когда необходимо снять крышку, захват перемещается вниз к верхней поверхности крышки. Благодаря взаимодействию между положительным и отрицательным полюсами магнитов захват извлекает крышку. Когда необходимо отпустить крышку, магнит с положительным полюсом может быть отключен. Аналогичным образом, извлечение корзины также достигается за счет взаимодействия положительного и отрицательного полюсов магнитов.
Настоящий вариант реализации является предпочтительным исполнения захвата, Манипулятор со многими степенями свободы (11) для извлечения по оси Z также включает в себя уровень перемещения по оси Х (на чертеже не показан), который установлен на втором уровне (113) для извлечения по оси Z. Второй уровень может приводить в движение горизонтальный уровень для перемещения вверх и вниз по оси Z. На горизонтальном уровне установлен захват, который приводится в движение для перемещения по оси X. Нижний конец захвата снабжен пальцами для извлечения (1112), выступающими с двух сторон. Как показано на фиг. 11, верхняя поверхность крышки (4000) емкости снабжена приемной канавкой (1113). В приемную канавку (1113) может быть вставлен палец (1112) для извлечения по оси X. Извлечение пальцами захвата (1112) при помощи приемной канавки (1113) по оси Z может быть ограничено.
Когда второй уровень манипулятора приводит в движение или косвенно приводит в движение захват (111) для достижения положения извлечения крышки (4000) емкости, в это время пальцы (1112) на нижнем конце захвата находятся на той же горизонтальной линии, что и приемная канавка (1113). Горизонтальный уровень для перемещения по оси X приводит в движение захват, то есть и пальцы (1112), которые входят в приемную канавку (1113). Поскольку извлечение пальцами захвата при помощи приемной канавки по оси Z может быть ограничено, процесс заключается в том, что второй и первый уровень направляют пальцы вверх, а принимающий горизонтальный уровень отвечает за горизонтальное перемещение по оси X, и извлекаемая крышка устанавливается в заданное положение.
Для оптимизации хранения или извлечения крышки, а также для повышения эффективности, дешевизны и стабильности конструкции, камера для извлечения, согласно настоящему изобретению, оснащено системой транспортировки по оси X (12). Система транспортировки по оси X предназначена для извлечения крышки (4000) из многоуровневого манипулятора (11) и перемещения ее в заданное положение. (см. чертеж конструкции хранилища крышек (13)).
Предпочтительный вариант реализации системы транспортировки по оси X (12): система транспортировки включает в себя элементы для перемещения по оси X (121) и хранилище для крышек (13). Элементы для перемещения по оси X располагаются перпендикулярно хранилищу для крышек (13). Способ установки, описанный здесь, учитывает факт, что положение элементов для перемещения по оси X и положение хранилище позволяют перемещать крышку (4000) или контейнер для хранения (1000), извлеченные с помощью захвата (111), к хранилищу. Конечно, элементы для перемещения по оси X (121) могут быть установлены, чтобы толкать крышку в заданное положение. Если крышка открыта и установлена таким образом, чтобы не препятствовать извлечению корзины или контейнера для хранения, это входит в вышеуказанную сферу применения. Поскольку извлечение пальцами захвата при помощи приемной канавки по оси X неограниченно, установка элементов для перемещения по оси X (121) не должна быть слишком сложной для других направлений. Главное, обеспечивается транспортировка по оси X, что значительно экономит затраты и пространство на проектирование конструкций.
Дополнительный вариант реализации: система транспортировки по оси X (12) включает в себя элементы для перемещения по оси X (121) и хранилище для крышек (13), которые располагаются по обе стороны манипулятора (11). Элементы для перемещения по оси X (121) могут перемещать крышку или контейнер для хранения, извлеченные с помощью захвата, в хранилище для крышек или заданное положение;
Элементы для перемещения по оси X (121) включают в себя опору системы транспортировки (122), электродвигатель (123), движущуюся пластину (124) и направляющий стержень (125). Опора закреплена внизу с одной стороны многоуровневого манипулятора (11). Электродвигатель и направляющий стержень закреплены соответственно на опоре. Движущаяся пластина (124) перемещается вдоль направляющего стержня (125) при помощи двигателя (123). Движущаяся пластина может перемещаться и выдвигаться с одной стороны многоуровневого манипулятора (11) на другую сторону и находится рядом с хранилищем для крышек (13).
Хранилище для крышек (13) снабжено приемным отверстием (131) для стыковки с движущейся пластиной (124).
Когда необходимо извлечь пробирку для криоконсервации из емкости (2000), манипулятор со многими степенями свободы (11) использует захват, чтобы сначала извлечь крышку (4000) в положение, соответствующее элементам для перемещения по оси X (121), а электродвигатель (123) приводит в движение движущуюся пластину (124) для перемещения по оси X при помощи направляющего стержня (125). С этого момента движущаяся пластина проходит с одной стороны манипулятора (11) до дна и перемещает крышку (4000) в хранилище для крышек (13), расположенное с противоположной стороны манипулятора. Таким образом, крышка (4000) выдвигается в хранилище для крышек (13), что не только позволяет извлекать и хранить крышку, но и облегчает использование манипулятора для извлечения корзины или контейнера из емкости для хранения образцов. Хранилище, расположенное рядом с перемещающейся по оси X пластиной, снабжено приемным отверстием, и крышка выдвигается и извлекается из приемного отверстия элементами для перемещения по оси X.
Возможна комбинация многоуровневого манипулятора для извлечения по оси Z (11) и системы транспортировки по оси Х (12), а также системы приема по оси Y (14). Расположение системы приема по оси Y (14) должно учитывать оптимальную рациональность и эффективность прямого или опосредованного приема контейнеров для хранения образцов. Предпочтительный способ реализации: система приема по оси Y (14) осуществляет прием контейнеров для хранения образцов (1000), а затем перемещает их в соответствующее положение системы транспортировки по оси Х (12). Установка системы приема по оси Y (14) позволяет осуществлять прием контейнеров (1000) по оси Y, обеспечивая работу камеры для извлечения (1) также и по оси Y, делая прием контейнеров более удобным.
Предпочтительный дополнительный вариант реализации настоящего изобретения: система приема по оси Y (14) включает направляющую (141), направляющий лоток (142) и приемный канал емкости для хранения (143). Направляющая проходит вдоль оси Y и расположена под опорой системы транспортировки (122). Приемный канал расположен с возможностью скольжения на направляющей (141) и имеет определенную длину по оси X. Направляющий лоток (142) установлен с возможностью скольжения в приемном канале.
Система приема по оси Y (14) также включает в себя элементы для перемещения для емкости (15), которые расположены в положении, соответствующем приемному каналу (143). Элементы для перемещения для емкости (15) может выдвигать направляющий лоток (142) по оси Y в приемном канале (143).
Элементы для перемещения для емкости (15) включают электродвигатель (151) и движущуюся пластину (152). Электродвигатель расположен на нижней поверхности опоры системы транспортировки (122), а движущаяся пластина с возможностью скольжения может быть установлена на нижней поверхности опоры (122). Электродвигатель приводит в движение движущуюся пластину, которая совершает перемещение по оси X.
В этом варианте реализации направляющий лоток (142) принимает снаружи контейнер (1000). В этом месте можно установить захват (5000) в камере для извлечения для перемещения целевого контейнера (1000) по оси Y в направляющий лоток (142). Также возможен выбор другого способа захвата, который не ограничивается данным текстом. После того, как направляющий лоток принимает целевой контейнер для хранения (элементы привода, которые управляют приемным каналом (143), должны быть установлены здесь, а не дублироваться), элементами для перемещения контейнеров приводится в движение направляющий лоток (142), и целевой контейнер перемещается в соответствующее положение элементов для перемещения (15). Электродвигатель (151) элементов для перемещения (15) приводит в движение движущуюся пластину (152), чтобы выдвинуть целевой контейнер по оси X до места назначения.
Движущаяся пластина (152) выталкивает целевой контейнер. Перед этим манипулятор со многими степенями свободы (11) извлекает крышку (4000) емкости (2000) после того, как система транспортировки по оси X (12) переместит крышку в хранилище (13). Манипулятор со многими степенями свободы (11) перемещается вниз таким образом, что захват (111) перемещается в емкость для хранения образцов (2000), а затем извлекается корзина (3000). Вышеупомянутый способ описан в способах установки захвата. Предпочтительным здесь является то, что верхняя поверхность корзины перемещается по оси X без ограничений, а конструкция приемной канавки (1113) ограничивает извлечение при помощи пальцев (1112) по оси Z. Процесс извлечения аналогичен уже описанному и не нуждается в повторении. Захват извлекает корзину в положение, соответствующее элементам для перемещения (15), и электродвигатель (151) приводит в движение движущуюся пластину (152). Движущаяся пластина по оси X, подталкивая целевой контейнер для хранения к корзине; как показано на фиг. 4. Вышеуказанные корзины выстраиваются вертикально на приемном лотке для корзин (6) при помощи движущейся пластины. После размещения корзины на приемном лотке (6), манипулятор со многими степенями свободы (11) опускает ее в исходное состояние, тем самым отправляя на хранение целевой контейнер.
Предпочтительный вариант реализации элементов для перемещения (15): указанные элементы включают первую движущуюся пластину (153), вторую движущуюся пластину (154) и движущуюся головку (155). Верхняя поверхность первой движущейся пластины (153) может быть установлена с возможностью скольжения на нижней поверхности опоры системы транспортировки (122). Один конец первой движущейся пластины (153) прикрепляется под прямым углом к концу второй движущейся пластины (154), а другой конец второй движущейся пластины (154) прикреплен под прямым углом к головке (155). Движущаяся пластина (152) имеет форму перевернутой буквы “Z”. Эта конструкция позволяет рационально соединить систему транспортировки по оси Х (12) и элементов для перемещения (15). Конструкция компактна и в большей степени отвечает потребностям транспортировке и работе системы по оси X и элементов для перемещения (15).
Примером этого варианта реализации является дальнейшая оптимизация более конкретного варианта реализации системы приема по оси Y (14). Система приема по оси Y также включает в себя электродвигатель (144), винт вала (145) и гайку (146) для приемного канала емкости для хранения. Электродвигатель приводит во вращение конец винта вала, а другой конец винта вала расположен с возможностью вращения на одном конце направляющей (141), удаленной от опоры (122).
Приемная гайка (146) для приемного канала емкости для хранения прикреплена к одному концу приемного канала, и винт вала (145) входит в контакт с гайкой для фиксации приемного канала.
Электродвигатель расположен под соединением между первой и второй движущейся пластинами для контейнеров для хранения. Приемная канавка контейнера может быть перемещена в положение, соответствующее направляющей головке.
Электродвигатель (144) приводит во вращение винт вала (145), тем самым приводя в движение гайку (146) приемного канала вдоль винта вала (145) линейным движением по оси Y. Таким образом, приемный канал (143) перемещается линейно по оси Y, обеспечивая перемещение направляющего лотка (142) по оси Y после приема целевого контейнера для хранения, и он перемещается в соответствующее положение направляющей головки (155), которая перемещает контейнер в корзину.
Для дальнейшего повышения стабильности целевого контейнера для хранения в условиях низкой температуры во время процесса извлечения предлагается настоящий вариант реализации. Кроме данного варианта реализации также предусматривается предпочтительный вариант реализации. Система приема по оси Y (14) также включает в себя элемент низкотемпературной защиты (16), обеспечивающий низкую температуру хранения. Элемент низкотемпературной защиты (16) расположен под приемным каналом (143) емкости для хранения или закреплен на нижней поверхности приемного канала (143). Элемент низкотемпературной защиты (16) полый внутри, а верхняя поверхность снабжена множеством отверстий для азота (161). Полость и труба для подачи азота соединены. Таким образом, трубопровод подает азот в полость. Поскольку предусмотрены отверстия для азота, жидкий азот вытекает из них, обеспечивая непрерывность подачи. Таким образом, в приемном канале постоянно поддерживается низкая температура.
В дополнительном варианте предпочтительной реализации этого варианта элемент низкотемпературной защиты форму короба, цилиндра или полусферы. Конкретная структура криогенной защиты здесь не ограничена. Один из вариантов подробно описан здесь, как показано на фиг. 2. Криогенная защита представляет собой прямоугольный короб, а приемный канал расположен на прямоугольном корпусе.
В настоящем варианте реализации дополнительно описывается хранилище для крышек емкостей. Хранилище для крышек емкостей (13) включает корпус (132) и элементы привода (133). Корпус (132) расположен близко к элементам для перемещения по оси Х (121). Одна сторона корпуса снабжена приемным отверстием (131). Корпус (132), расположенный близко к торцевой поверхности захвата, снабжен отверстием для извлечения крышек емкости (134). Для взаимодействия с системой транспортировки по оси X (12), чтобы сделать хранилище для крышек более устойчивым для размещения крышек, предусмотрены элементы привода, которые приводят в движение корпус по оси X.
В конкретном и предпочтительном варианте реализации элементы привода (133) включают в себя опору (135), рельсовый путь (136) и соединительную пластину (137).
Опора (135) фиксируется в камере для извлечения и расположена внизу с противоположной стороны многоуровневого манипулятора (11) для извлечения по оси Z. Рельсовый путь (136) расположен на опоре (135). Один конец соединительной пластины (137) установлен с возможностью скольжения по рельсовому пути (136), а другой - зафиксирован на корпусе хранилища (132).
Опора (135) расположена над корпусом хранилища (132), а на двух сторонах верхней поверхности опоры (135) симметрично расположены первая направляющая (138) и вторая направляющая (139).
Верхние поверхности опоры (135) расположены по обе стороны от первой направляющей (138) и второй направляющей (139) и, соответственно, снабжены двумя группами направляющих каналов (1310) по оси Х.
Соединительная пластина (137) содержит скользящую пластину (1311), первую пластину (1312) и вторую пластину (1313 ). Скользящая пластина (1311) может быть установлена с возможностью скольжения на первой направляющей (138) и второй направляющей (139). Верхний конец первой пластины закреплен вертикально на одной стороне скользящей пластины, а нижний конец прикреплен к крышке корпуса хранилища через направляющий канал для перемещения на одной стороне. Верхний конец второй пластины закреплен вертикально с другой стороны скользящей пластины, а нижний - прикреплен к крышке корпуса хранилища через направляющий канал для перемещения на другой стороне.
Опора (135) расположен над корпусом (132), обеспечивая оптимальное соединение с системой транспортировки по оси X. Опора снабжена электродвигателем, который приводит в движение скользящую пластину, перемещающуюся по оси X, тем самым приводя в движение первую и вторую пластины для перемещения по оси X. Также приводится в движение корпус хранилища по оси X. Поскольку верхний конец первой пластины расположен вертикально, прикрепленный к одной стороне скользящей пластины, а нижний проходит направляющий канал для перемещения на одной стороне и прикреплен к крышке корпуса, такое расположение не только делает всю конструкцию компактной и устойчивой, но также повышает устойчивость корпуса и улучшает взаимодействие с системой транспортировки по оси X и крышкой, извлекаемой с помощью захвата.
В дальнейшей реализации этого предпочтительного варианта камера для извлечения (1) дополнительно включает элементы системы возврата контейнеров (17), которые расположены в положении, противоположном элементам для перемещения (15). Элементы системы возврата контейнеров (17) включают движущуюся пластину (171), которая способна перемещаться по оси X.
Элементы системы возврата контейнеров (17) включают опорную пластину (172) и электродвигатель (173).
Опорная пластина (172) расположена под корпусом хранилища (132), в положении, противоположном элементам системы возврата контейнеров (17). Движущаяся пластина (171) расположена с возможностью скольжения на опорной пластине (172) под действием электродвигателя (173). Движущаяся пластина (171) снабжена направляющей головкой (174) на стороне, близкой к направляющей головке (155).
Теперь более подробно остановимся на процессе извлечения контейнера для хранения из емкости для хранения проб: сначала используйте манипулятор для извлечения по оси Z и систему транспортировки по оси X, чтобы извлечь крышку емкости для хранения проб. Захват затем извлекает корзину в заданное положение. Описанное здесь целевое положение относится к положению направляющей головки системы возврата и подставке для хранения целевого контейнера. Извлечение целевого контейнера с подставки осуществляется с помощью корзины. В это время элементы системы возврата приводят в действие двигатель, который приводит в движение движущуюся пластину для перемещения к целевому контейнеру по оси X, а направляющая головка используется для перемещения целевого контейнера к лотку для перемещения по оси Y. Перед этим лоток перемещается в положение, соответствующее направляющей головке элементов системы возврата контейнера. После того, как перемещаемый по оси Y лоток принимает целевой контейнер, используется направляющий канал для перемещения контейнера по оси Y, чтобы доставить его в положение, где можно обеспечить удобный захват, и рабочее устройство захвата принимает целевой контейнер в транспортировочный бокс и перемещает его из транспортировочного бокса. Когда целевой контейнер помещается в транспортировочный бокс, устройство для открывания крышки закрывает и герметизирует крышку открытого транспортировочного бокса.
Когда манипулятор со многими степенями свободы для извлечения по оси Z взаимодействует с элементами системы возврата контейнеров в целях извлечения целевого контейнера, он помещает корзину обратно в емкость для хранения проб. Затем крышку емкости для хранения проб необходимо извлечь и закрыть. Рабочий процесс извлечения и закрытия крышки резервуара заключается в следующем: поскольку торцевая поверхность корпуса хранилища крышек рядом с элементами для извлечения снабжена отверстием для извлечения крышки. Когда необходимо закрыть крышку емкости, захват сначала перемещается в положение, соответствующее крышке в горизонтальном направлении по оси X, то есть пальцы захвата соответствуют положению приемной канавки крышки в горизонтальном направлении по оси X. В это время, элементы привода приводит в движение корпус хранилища крышек по оси захвата, тем самым приводя корпус в движение по оси X до тех пор, пока пальцы захвата не войдет в положение приемной канавки. Крышка емкости для хранения проб может быть извлечена по оси Z. После того, как пальцы захвата состыковываются с приемной канавкой, элементы привода приводят в действие корпус, возвращая его на исходный путь. Приводимый в действие многоуровневым манипулятором, захват возвращает крышку в емкость для хранения проб, тем самым завершая весь процесс. Это происходит во время доступа к контейнеру для хранения. После завершения доступа к емкости крышка должна быть закрыта. Эти процессы происходят одновременно.
Пример 2
Система хранения образцов в рамках существующего уровня техники на всем протяжении процесса доступа показывает, что конструкция извлечения из емкости для хранения образцов не только спроектирована нерационально, но и отличается высокой себестоимостью. Кроме того, невозможно реализовать подключение нескольких устройств, сформировать промышленную линию доступа к емкости и гарантировать доступ по всей холодовой цепи.
Настоящий вариант реализации обеспечивает интеллектуальную систему доступа к образцу, которая содержит элементы стыковки передаточной системы (7), камеру для извлечения (1) и емкость для хранения образцов (2000). Камера для извлечения (1) герметична и расположена на верхнем конце емкости для хранения образцов, а также снабжена герметичным портом приема (18). Элементы стыковки передаточной системы (7) предусмотрены на внешней стороне емкости (2000), могут принимать передаточный контейнер (701) и приводить его в движение таким образом, что отверстие контейнера стыкуется с герметичным портом приема (18).
Процесс работы конструкции в этом варианте реализации: необходимо извлечь биологические образцы из емкости для хранения образцов, поместить пробирку для криоконсервации, содержащую биологические образцы, в контейнер для хранения, затем поместить контейнер для хранения в транспортировочный бокс, а затем осуществить транспортировку бокса. Поскольку сам транспортировочный бокс имеет функцию поддержания холодной температуры, во время этого процесса также защищается низкотемпературная среда. Поместив транспортировочный бокс на элементы стыковки передаточной системы, которые доставят его так, чтобы отверстие бокса состыковалось с герметичным портом камеры для извлечения. Транспортировочный бокс открывается в камере для извлечения. После открытия целевой контейнер хранится в камере для извлечения. Герметичный порт приема снабжен уплотнительной лентой, а отверстие транспортировочного бокса снабжено уплотнительной лентой, которую можно герметизировать встык с уплотнительной лентой герметичного порта приема. При стыковке достигается уровень герметичности, обеспечивающий стабильность низкотемпературной среды.
В течение всего процесса целевой контейнер для хранения всегда находится в низкотемпературной среде, независимо от того, находится ли он в транспортировочном боксе или открыт в камере для извлечения. Более того, за счет установки элементов стыковки очень удобно формировать несколько емкостей для хранения проб для хранения и извлечения, формировать производственную линию доступа и реализовывать доступ по всей холодовой цепи.
Несколько емкостей для хранения проб образуют специализированную линию хранения и извлечения проб. Каждая емкость для хранения проб оборудована камерами для извлечения, как описано в примере реализации 1. Он позволяет обеспечить возможность непосредственного извлечения или передачи проб на всей производственной линии или непосредственного хранения и извлечения в условиях очень низких температур более качественным образом. Кроме того, обеспечивается управление промышленными линиями, простота извлечения и удобная стыковка двух или более емкостей для хранения проб. Таким образом, установка элементов стыковки передаточной системы более способствует вышеупомянутому положительному результату. Этот вариант реализации обеспечивает предпочтительную реализацию элементов стыковки передаточной системы (7), которые включают движущуюся направляющую (702), тележку (703) и элементы привода (704) для стыковки. Направляющая (702) расположена снаружи емкости для хранения проб (2000). Тележка (703) расположена на движущейся направляющей (702), и может перемещать транспортировочный бокс по движущейся направляющей (702). Элементы стыковки передаточной системы (7) могут приводить в движение транспортировочный бокс так, что отверстие бокса и герметичный порт приема стыкуются.
Элементы стыковки передаточной системы перемещают транспортировочный бокс таким образом, чтобы отверстие бокса было герметично состыковано с портом. Камера по извлечению используется для герметичного извлечения целевого контейнера для хранения из транспортировочного бокса, гарантируя состояние процесса по всей холодовой цепи, поэтому нет необходимости компоновки элементов стыковки передаточной системы сложным образом и создавать герметичную среду для элементов стыковки передаточной системы в целом, потому что, если необходимо состыковать две или более емкостей для хранения проб, можно очень удобным образом настроить элементы стыковки передаточной системы между ними для реализации цели обеспечения по всей холодовой цепи.
В предпочтительной дальнейшей реализации этого варианта, как показано на фиг. 3, движущаяся направляющая (702) имеет С-образную, U-образную или вогнутую форму. Такая форма позволяет осуществлять прямое извлечение или делает хранение емкостей более удобным. Движущаяся направляющая может иметь С-образную, U-образную или вогнутую форму для облегчения стыковки двух или более емкостей для хранения проб.
В предпочтительной дальнейшей реализации этого варианта элементов привода (704) для стыковки включает электродвигатель (705), вертикальную направляющую (706) и подъемную платформу (707). Электродвигатель (705) приводит в движение подъемную платформу (707) для выполнения подъема вдоль вертикальной направляющей (706).
Движущаяся направляющая (702) расположена на верхнем конце вертикальной направляющей (706), и обе они имеют Т-образную или форму перевернутой L. Один конец движущейся направляющей (702) проходит через подъемную платформу (707).
Верхний конец подъемной платформы (707) имеет два свободных конца, которые соответственно снабжены подъемными пластинами приема (708). Между подъемными пластинами (708) предусмотрена опорная пластина (709). Транспортировочный бокс (701) может быть размещен или установлен на опорной пластине (709).
Как показано на фиг. 5, в исходном состоянии опорная пластина (709) находится в положении, удобном для приема передаточного контейнера. Когда он перемещается и помещается на опорную пластину, электродвигатель приводит в движение подъемную платформу, совершая движение по вертикальной направляющей, тем самым заставляя опорную пластину двигаться вверх, и герметизируя передаточный контейнер с герметичным портом приема операционного камеры для извлечения. Верхний конец подъемной платформы снабжен двумя свободными концами. Высота свободных концов выше движущейся направляющей, так что подъемная опорная пластина находится выше движущейся направляющей. Опорная пластина расположена на двух свободных концах приемных пластин. Приемные пластины поддерживают опорную пластину в вертикальном положении. Однако, оно не ограничивается перемещением опорной пластины, приводимой в движение мини-тележкой по движущейся направляющей.
Если неудобно размещать передаточный контейнер, перенесенный снаружи, непосредственно в положение, соответствующее подъемной платформе, можно использовать мини-тележку для перемещения опорной пластины в соответствующее положение. После установки передаточного контейнера на опорную пластину, мини-тележку можно использовать для подъема, чтобы опорная пластина перемещалась к приемным пластинам, затем для выполнения герметичной стыковки используется подъемная платформа.
В предпочтительной дальнейшей реализации этого варианта опорная пластина (709) снабжена ограничительной пластиной передаточного контейнера (710), которая может ограничивать положение контейнера. Установка опорной пластины таким образом позволяет более точно принимать контейнер.
Предпочтительный вариант этого варианта реализации предусматривает применение мини-тележки (703) с автоматической подзарядкой. Тележка включает каркас (8), аккумулятор (801) и соединительную пластину аккумулятора (802).
Нижняя поверхность каркаса тележки (8) снабжена направляющей скольжения (803), которая расположена с возможностью скольжения на движущейся направляющей (702). Нижний конец каркаса тележки (8) снабжен аккумулятором (801), который соединена с соединительной пластиной (802).
Контактная пластина источника питания (804) расположена на движущейся направляющей (702) и под каркасом тележки в положении, соответствующем соединительной пластине.
Верхняя поверхность каркаса тележки снабжена стойкой (805) для позиционирования тележки. Опорная пластина (709) снабжена отверстием для позиционирования, соответствующим стойке (805) для позиционирования тележки. Когда тележка должна двигаться самостоятельно, электродвигатель для стыковки можно использовать для подъема опорной пластины (709) на определенное расстояние, чтобы фиксирующая стойка тележки могла быть отделена от отверстия приемной пластины.
Мини-тележка использует направляющую скольжения для перемещения таким образом, чтобы соединительная пластина аккумулятора тележки на нижнем конце каркаса тележки соединялась с контактной пластиной.
Сама контактная пластина соединена со структурой источника питания, поэтому аккумулятор тележки заряжается через контактную пластину.
В предпочтительной дальнейшей реализации этого варианта конструкция тележки также включает датчик расстояния (806), микроконтроллер (807), двигатель (808) и колеса (809). Датчик расстояния (806) установлен на нижней поверхности каркаса тележки (8).
Микроконтроллер соединен с датчиком расстояния и двигателем тележки соответственно, и управляет ими. Двигатель тележки приводит в движение колеса для перемещения по движущейся направляющей. Установка датчика расстояния позволяет измерять положение тележки, делая расстояние перемещения более точным. Двигатель тележки приводит в движение колеса по движущейся направляющей, тем самым реализуя перемещение по ней.
Предпочтительной дополнительной реализацией этого варианта является: движущаяся направляющая (702) включает первую направляющую (711) и вторую направляющую (712), и опорную пластину (713). Верхние поверхности обеих сторон опорной пластины (713) тележки симметрично снабжены первой и второй вспомогательной направляющими. Нижняя поверхность каркаса тележки снабжена двумя группами направляющих скольжения, которые расположены с возможностью скольжения на первой и второй направляющих соответственно.
Контактная пластина (804) расположена на опорной пластине тележки.
Колодки (714) предусмотрены на опорной пластине тележки, и колеса перемещаются по колодкам.
В предпочтительной дальнейшей реализации этого варианта верхняя поверхность каркаса тележки снабжена фиксирующей стойкой для позиционирования тележки, а приемная пластина снабжена отверстием для позиционирования, соответствующим стойке тележки.
Изобретение раскрывает устройство для открывания крышки (9) для камеры для извлечения (1). Камера для извлечения (1) также включает устройство для открывания крышки (9), которое находится в положении, противоположном герметичному порту приема. Устройство может открывать крышку передаточного контейнера через отверстие транспортировочного бокса, соединенном с герметичным портом приема.
В предпочтительной дальнейшей реализации этого варианта устройство для открывания крышки включает в себя неподвижную опору (901), элементы привода (902), большую стрелу (903), малую стрелу (904) и поддон (905).
Неподвижная опора (901) зафиксирована в камере для извлечения, а элементы привода (902) предусмотрены на неподвижной опоре (901). Один конец большой стрелы (903) расположен с возможностью вращения на неподвижной опоре. Один конец малой стрелы расположен с возможностью вращения на другом конце большой стрелы, а другой - неподвижно закреплен на поддоне (905). Элементы привода (902) приводят во вращение стрелы.
Поддон включает корпус поддона, фиксирующую стойку (906) и магнит (907) для открывания крышки.
Корпус поддона закреплен с другим концом малой стрелы, и снабжен фиксирующей стойкой и магнитом с положительным полюсом.
Крышка транспортировочного бокса снабжена отверстием для позиционирования, а фиксирующая стойка может быть вставлена в отверстие транспортировочного бокса. Крышка транспортировочного бокса снабжена магнитом с отрицательным полюсом. Магнит с отрицательным полюсом на крышке транспортировочного бокса и магнит с положительным полюсом на поддоне взаимно притягиваются.
Элементы привода используются для приведения в движение малой стрелы. Один конец малой стрелы расположен с возможностью вращения на другом конце большой стрелы. Один конец большой стрелы установлен с возможностью вращения на неподвижной опоре. Поэтому, когда элементы привода приводится в движение, поддон может приводиться в движение для перемещения к крышке транспортировочного бокса. Используется фиксирующая стойка, установленная на поддоне, чтобы ее можно было вставить в отверстие для позиционирования транспортировочного бокса. Магнит с отрицательным полюсом на крышке транспортировочного бокса и магнит с положительным полюсом на поддоне взаимно притягиваются, так что крышку бокса можно открыть, используя движение большой и малой стрел. Когда нужно закрыть крышку транспортировочного бокса, нужно использовать движение большой и малой стрел. Питание магнита с положительным полюсом при открытии крышки отключается. Таким образом, магнит освобождает и закрывает крышку транспортировочного бокса.
В предпочтительной дальнейшей реализации этого варианта элементы привода (902) для открывания крышки включает в себя электродвигатель, направляющую (908) и каретку (909).
Электродвигатель (902) приводит в движение каретку (909) для выполнения подъема на направляющей (908), и один конец вращающегося вала закреплен каретке.
Другой конец вращающегося вала может вращаться или быть жестко закреплен на малой стреле. Как показано на фиг. 8, электродвигатель приводит в движение вверх и вниз по направляющей каретку (909), тем самым непосредственно приводя во вращение малую и большую стрелы. Это приводит к вращению большой стрелы на неподвижной опоре, тем самым реализуя движение поддона.
Этот предпочтительный вариант дополнительно обеспечивает реализацию емкости для хранения проб. Емкость для хранения проб (2000) включает корпус (20), встроенный резервуар с жидким азотом (201), вращающуюся пластину (202), элементы вала (203), двигатель (204), корзину (3000) и крышку (4000).
Верхняя поверхность корпуса емкости для хранения для проб снабжена крышкой.
Встроенный резервуар с жидким азотом расположен в корпусе емкости, а верхняя поверхность встроенного резервуара с жидким азотом снабжена приемным баком (205).
Двигатель приводит во вращение вращающийся элемент вала, а нижний конец вала расположен с возможностью вращения в приемном баке (205). На периферии вращающегося вала закреплена вращающаяся пластина. Корзина устанавливается на вращающейся пластине. Когда необходимо извлечь целевой контейнер для хранения, двигатель используется для приведения во вращение элемента вала, тем самым приводя в движение вращающуюся пластину и корзину, в которой находится целевой контейнер для хранения. Пластина повернута к нижней части крышки емкости для облегчения извлечения.
Вращающийся вал включает центральный вал (206) и приемный вал (207). Двигатель приводит в движение центральный вал, внутри которого предусмотрена камера, заполненная азотом. Нижний конец центрального вала соединен соосно с приемным валом, а нижний конец приемного вала расположен с возможностью вращения в приемном баке.
Камера заполнена жидким азотом, который обеспечивает слой холодоизоляции.
В предпочтительном дополнительном варианте реализации настоящего изобретения камера для извлечения также снабжена устройством для разморозки (10) и сканером кодов (101), при этом устройство для разморозки расположено вблизи герметичного порта приема, а сканер кодов расположен вблизи устройства для разморозки. Как показано на фиг. 4, устройство для разморозки включает электродвигатель и скребок для чистки снега. Когда требуется размораживание, электродвигатель приводит во вращение скребок для чистки снега, а захват удерживает контейнер для хранения рядом со скребком, так что происходит разморозка. После размораживания захват переносит контейнер для хранения в сканер кодов (101) и вводит доступный или извлеченный целевой контейнер для хранения в систему для хранения.
В предпочтительном дополнительном варианте реализации настоящего изобретения камера для извлечения также снабжена смотровым окном (102) и съемной дверью (103). Смотровое окно может облегчить наблюдение за процессом извлечения или доступа к пробам, а съемная дверь может облегчить техническое обслуживание камеры.
Порядок приведенных выше примеров выбран исключительно для удобства описания и не отражает преимуществ и недостатков приведенных примеров.
Наконец, следует отметить, что приведенные выше примеры используются только для иллюстрации технической схемы настоящего изобретения, а не для ее ограничения. Хотя настоящее изобретение подробно описано со ссылкой на вышеупомянутые примеры, рядовой технический персонал в данной области техники должен понимать: еще можно модифицировать описанную техническую схему в приведенных выше примерах или произвести эквивалентную замену некоторых технических характеристик. Эти модификации или замены не выводят суть соответствующих технических решений из объема технических решений каждого варианта реализации изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ РЕАКТОРА РБМК-1000 И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491665C1 |
| ГЕРМЕТИЧНЫЙ ПЕНАЛ ХРАНЕНИЯ ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА РЕАКТОРА РБМК-1000 | 2013 |
|
RU2562055C2 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| СПОСОБ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ РЕАКТОРА РБМК-1000 И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490734C1 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| Автоматизированная система камер для обработки имплантатов | 2025 |
|
RU2839087C1 |
| УСТАНОВКА И СПОСОБ ЗАПОЛНЕНИЯ КОНТЕЙНЕРОВ ЦЕННЫМИ ДОКУМЕНТАМИ, ПРЕЖДЕ ВСЕГО БАНКНОТАМИ, А ТАКЖЕ СИСТЕМА ОБРАБОТКИ ЦЕННЫХ ДОКУМЕНТОВ | 2018 |
|
RU2780013C2 |
| МОДУЛЬ ЗАГРУЗКИ И ВЫГРУЗКИ КОНТЕЙНЕРОВ ДЛЯ КАМЕРЫ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811536C1 |

Настоящее изобретение относится к области хранения биологических образцов, а именно к их извлечению и хранению. Камера для извлечения оснащена манипулятором со многими степенями свободы для перемещений по оси Z и системой транспортировки по оси X. Манипулятор со многими степенями свободы представляет собой механизм для перемещения на различные расстояния в несколько этапов по оси Z. Вышеописанный манипулятор оснащен захватом для реализации перемещения извлеченных проб по оси Z. Система транспортировки по оси X находится в положении, соответствующем захвату, и обеспечивает перемещение крышки или контейнера для хранения образцов, извлеченных с помощью захвата, в заданное положение. Оптимизированная конструкция обеспечивает экономию места, удобство и автоматизацию управления, достаточную герметизацию и теплоизоляцию. 2 н. и 22 з.п. ф-лы, 11 ил.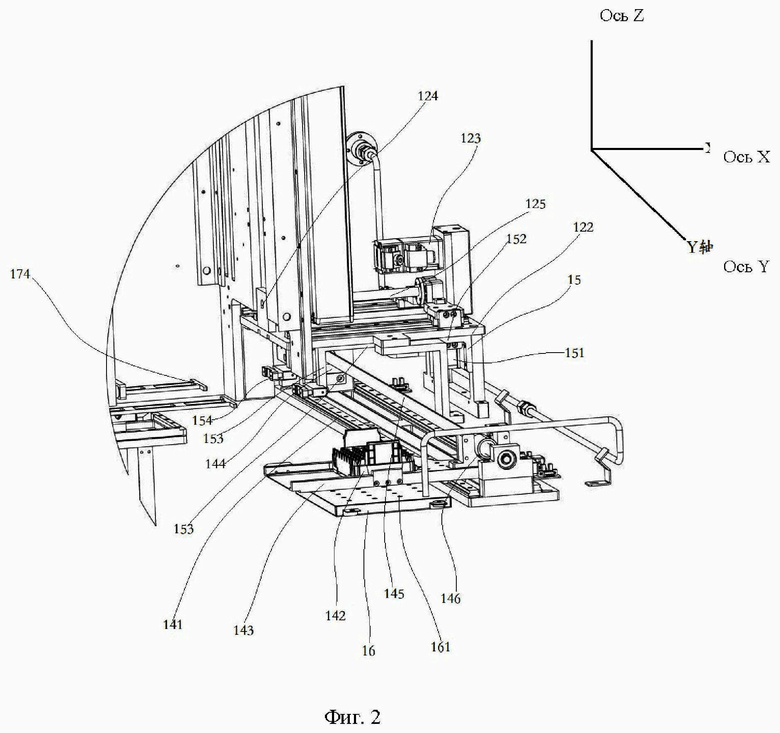
1. Камера для извлечения, отличающаяся тем, что оснащена многоуровневым манипулятором для перемещений по оси Z и системой транспортировки по оси X, манипулятор со многими степенями свободы представляет собой механизм для перемещения на различные расстояния в несколько этапов по оси Z, оснащенный захватом для реализации перемещения извлеченных проб по оси Z;
система транспортировки по оси X находится в положении, соответствующем захвату, и выполнена с возможностью перемещения крышки или контейнера для хранения образцов, извлеченных с помощью захвата, в заданное положение;
манипулятор со многими степенями свободы содержит первый, второй и горизонтальный уровни извлечения по оси Z;
горизонтальный уровень установлен на первом уровне по оси Z, который может приводить в движение принимающий горизонтальный уровень для перемещения по оси Z, второй уровень для извлечения по оси Z установлен на принимающем горизонтальном уровне, и принимающий горизонтальный уровень выполнен с возможностью приведения в движение второй уровень для перемещения по оси X, захват установлен на втором уровне, который может приводить в движение захват для перемещения вверх-вниз по оси Z;
система транспортировки по оси X состоит из элементов для перемещения и хранилища для крышек емкостей для хранения образцов, хранилище для крышек расположено перпендикулярно элементам для перемещения, которые выполнены с возможностью перемещения крышек или контейнеров для хранения образцов, извлеченных захватом в хранилище для крышек либо в заданное положение;
элементы для перемещения и хранилище для крышек системы транспортировки расположены по обеим сторонам многоуровневого манипулятора на оси X;
элементы для перемещения включают: опору, электродвигатель, движущуюся пластину и направляющий стержень;
опора системы транспортировки фиксируется с одной стороны под многоуровневым манипулятором, электродвигатель и направляющий стержень зафиксированы на опоре, движущаяся пластина расположена в нижней части электродвигателя и выполнена с возможностью приведения в движение направляющим стержнем, движущаяся пластина выполнена с возможностью перемещения между противоположными концами многоуровневого манипулятора рядом с хранилищем для крышек;
хранилище для крышек снабжено приемным отверстием для стыковки с движущейся пластиной по оси X, а также системой приема по оси Y;
система приема по оси Y выполнена с возможностью приема контейнера для хранения и перемещения его в соответствующее положение системы транспортировки по оси X;
система приема по оси Y включает направляющую, лоток и канал приема;
направляющая вдоль оси Y и расположена под опорой системы транспортировки; приемный канал для контейнеров расположен с возможностью скольжения на направляющей по оси Y и имеет определенную длину по оси X, лоток расположен с возможностью скольжения по оси X;
система приема по оси Y также включает элементы для перемещения контейнеров, которые находятся в положении, соответствующем приемному каналу, и могут перемещать по оси Y лоток до приемного канала;
элементы для перемещения контейнеров включают электродвигатель и пластинчатый элемент, электродвигатель расположен на нижней поверхности опоры системы транспортировки, движущаяся пластина расположена с возможностью скольжения на нижней поверхности опоры системы транспортировки, электродвигатель выполнен с возможностью приведения в движение движущуюся пластину, совершая перемещения по оси X;
пластинчатый элемент для транспортировки контейнера включает первую и вторую пластины и направляющую головку, верхняя поверхность первой пластины расположена с возможностью скольжения на нижней поверхности опоры системы транспортировки, один конец первой пластины закреплен под прямым углом к концу второй пластины, а другой конец второй пластины закреплен под прямым углом с головкой, и движущиеся пластинчатые элементы образуют перевернутую букву «Z»;
также предусмотрена система возврата контейнеров, элементы системы возврата находятся в положении, противоположном движущейся пластине системы транспортировки, и включают движущуюся пластину, которая может совершать перемещение по оси X;
элементы системы возврата контейнеров включают опорную пластину и электродвигатель;
опорная пластина расположена под корпусом хранилища для крышек емкостей в положении, противоположном элементам системы транспортировки, а движущаяся пластина расположена с возможностью скольжения на опорной пластине под действием двигателя; на стороне пластины, расположенной рядом с контейнером, предусмотрена направляющая головка.
2. Камера для извлечения по п. 1, отличающаяся тем, что первый уровень манипулятора включает в себя электрические цилиндры А и В, направляющие А и В, горизонтальный уровень включает направляющую C и электрический цилиндр C;
направляющие A и B симметрично зафиксированы вертикально в камере для извлечения по оси Z, а два конца направляющей C соответственно расположены с возможностью скольжения на направляющих A и B по оси Z;
электрические цилиндры A и В выполнены с возможностью приведения в движение двух концов направляющей C вверх и вниз соответственно;
второй уровень извлечения по оси Z, приводимый в движение двигателем C, расположен с возможностью скольжения на направляющей C;
второй уровень извлечения по оси Z включает в себя электрический цилиндр D, выполненный с возможностью приведения в движение вверх и вниз подъемного элемента.
3. Камера для извлечения по п. 2, отличающаяся тем, что система приема по оси Y также включает электродвигатель, винт вращающегося вала и приемную гайку приемного канала, электродвигатель выполнен с возможностью приведения во вращение один конец винта вращающегося вала, и другой конец винта вала расположен с возможностью вращения на одном конце направляющей по оси Y вдали от опоры системы транспортировки;
гайка приемного канала закреплена на одном конце приемного канала, а винт вала входит в контакт с приемной гайкой;
электродвигатель расположен ниже точки соединения между первой и второй вспомогательной пластинами для транспортировки контейнеров, а канал приема может перемещаться в положение, соответствующее направляющей головке.
4. Камера для извлечения по п. 3, отличающаяся тем, что система приема по оси Y дополнительно включает элемент низкотемпературной защиты, причем он расположен под приемным каналом или закреплен на нижней поверхности приемного канала;
элемент низкотемпературной защиты полый внутри, а верхняя поверхность снабжена множеством отверстий для азота, которые сообщаются с полостью;
полость элемента низкотемпературной защиты соединена с трубопроводом подачи азота.
5. Камера для извлечения по п. 4, отличающаяся тем, что элемент низкотемпературной защиты имеет форму короба, цилиндра или полусферы.
6. Камера для извлечения по п. 4, отличающаяся тем, что хранилище для крышек емкости включает корпус и элементы привода, отверстие для приема предусмотрено на боковой стороне корпуса рядом с элементами транспортировки по оси X, а отверстие для извлечения крышки предусмотрено на торцевой поверхности корпуса рядом с захватом;
элементы привода могут приводить корпус в движение по оси X.
7. Камера для извлечения по п. 5 или 6, отличающаяся тем, что элементы привода хранилища для крышек емкости включают опору, направляющие и соединительную стойку, опора зафиксирована в камере для извлечения снизу в противоположной стороне от многоуровневого манипулятора, направляющие зафиксированы на вышеуказанной опоре, одна сторона соединительной стойки расположена на направляющей, обеспечивая возможность перемещения, а другая – закреплена на корпусе.
8. Камера для извлечения по п. 7, отличающаяся тем, что опора хранилища для крышек емкости расположена над корпусом, первая и вторая направляющие предусмотрены симметрично на обеих сторонах верхней поверхности опоры;
два направляющих канала по оси X соответственно предусмотрены на сторонах первой и второй направляющими на верхней поверхности опоры;
соединительная стойка включает скользящую пластину, первую и вторую пластины, причем скользящая пластина расположена с возможностью скольжения на первой и второй направляющих;
верхний конец первой пластины привода вертикально закреплен на одной стороне скользящей пластины, а нижний – проходит через направляющий канал с одной стороны и закреплен на корпусе хранилища для крышек;
верхний конец второй пластины закреплен вертикально на другой стороне скользящей пластины, а нижний – проходит через направляющий канал на другой стороне и фиксируется на корпусе хранилища для крышек.
9. Камера для извлечения по пп. 1-6 или 8, отличающаяся тем, что захват снабжен магнитом с положительным полюсом, верхняя поверхность крышки емкости снабжена магнитом с отрицательным полюсом; на верхней поверхности корзины предусмотрен магнит с отрицательным полюсом.
10. Камера для извлечения по пп. 1-6 или 8, отличающаяся тем, что манипулятор со многими степенями свободы включает уровень горизонтального перемещения по оси X, предусмотренный на втором уровне для извлечения по оси Z, второй уровень для извлечения по оси Z может приводить в движение горизонтальный уровень для перемещения вверх-вниз по оси Z, захват расположен на горизонтальном уровне, выполненном с возможностью приведения в движение захвата для перемещения по оси X;
нижний конец захвата снабжен пальцами, выступающими по обе стороны, а торцевая поверхность крышки емкости снабжена приемной канавкой, приемная канавка необходима для пальцев при извлечении по оси X, при этом извлечение пальцами при помощи приемной канавки по оси X ограничено.
11. Интеллектуальная система доступа к пробам, отличающаяся тем, что включает камеру для извлечения по пп. 1, 2, 3, 4, 5, 6 или 8, элементы стыковки передаточной системы и емкость для хранения образцов;
камера для извлечения герметична и расположена в верхней части емкости для хранения образцов, а также снабжена герметичным приемным портом;
элементы стыковки передаточной системы расположены на внешней стороне емкости для хранения образцов, могут принимать передаточный контейнер и приводить его в движение таким образом, что отверстие передаточного контейнера соединяется с герметичным портом приема;
элементы стыковки передаточной системы предусматривают движущуюся направляющую, мини-тележку и элементы привода, движущаяся направляющая расположена на внешней стороне емкости для хранения образцов, мини-тележка расположена на подвижной направляющей и может приводить в движение транспортировочный бокс вдоль направляющей; элементы привода могут приводить в движение транспортировочный бокс, так что отверстие бокса герметизируется и состыковывается с герметичным портом приема;
движущаяся направляющая имеет С-образную, U-образную или вогнутую форму;
элементы привода предусматривают электродвигатель, вертикальную направляющую и подъемную платформу, электродвигатель приводит в движение подъемную платформу для подъема вдоль вертикальной направляющей;
движущаяся направляющая расположена на верхнем конце вертикальной направляющей, и обе они расположены в виде буквы Т или перевернутой L, один конец движущейся направляющей проходит через подъемную платформу;
верхний конец подъемной платформы представляет собой два свободных конца, которые соответственно снабжены приемными пластинами, между приемными пластинами предусмотрена опорная пластина, транспортировочный бокс может быть установлен или размещен на опорной пластине.
12. Интеллектуальная система доступа к пробам по п. 11, отличающаяся тем, что опорная пластина снабжена ограничительной пластиной для транспортировочных боксов, которая может ограничивать боксы.
13. Интеллектуальная система доступа к пробам по п. 12, отличающаяся тем, что мини-тележка включает каркас, аккумулятор и соединительную пластину аккумулятора;
нижняя поверхность каркаса снабжена направляющей скольжения, которая установлена на движущейся направляющей с возможностью скольжения, и нижний конец каркаса снабжен аккумулятором, соединенным с соединительной пластиной;
контактная пластина расположена на движущейся направляющей в положении, соответствующем соединительной пластине под каркасом.
14. Интеллектуальная система доступа к пробам по п. 13, отличающаяся тем, что мини-тележка дополнительно оснащена датчиком расстояния, микроконтроллером, электродвигателем и колесами; датчик расстояния установлен на нижней поверхности каркаса мини-тележки, микроконтроллер и датчик расстояния подключены к электродвигателю, колеса мини-тележки выполнены с возможностью перемещения по движущейся направляющей при помощи электродвигателя.
15. Интеллектуальная система доступа к пробам по п. 14, отличающаяся тем, что движущаяся направляющая включает в себя первую, вторую направляющие и опорную пластину, на верхних поверхностях с обеих сторон опорной плиты симметрично расположены первая и вторая направляющие, нижняя поверхность каркаса снабжена двумя группами направляющих скольжения, которые расположены с возможностью скольжения на первой и второй направляющих соответственно;
контактная пластина расположена на опорной пластине;
на опорной пластине предусмотрены колодки, и колеса тележки выполнены с возможностью перемещения по ним.
16. Интеллектуальная система доступа к пробам по п. 15, отличающаяся тем, что верхняя поверхность каркаса тележки снабжена фиксирующей стойкой для позиционирования, приемная пластина снабжена отверстием для позиционирования тележки.
17. Интеллектуальная система доступа к пробам по п. 11, отличающаяся тем, что камера для извлечения дополнительно включает устройство для открывания крышки, расположенное в положении, противоположном герметичному порту, устройство для открывания крышки выполнено с возможностью открывания крышки транспортировочного бокса через отверстие бокса, соединенное с герметичным портом.
18. Интеллектуальная система доступа к пробам по п. 17, отличающаяся тем, что устройство для открывания крышки включает неподвижную опору, элементы привода, большую и малую стрелы и поддон;
неподвижная опора закреплена в камере для извлечения, элементы привода расположены на неподвижной опоре, один конец большой стрелы расположен с возможностью вращения на неподвижной опоре, один конец малой стрелы расположен с возможностью вращения на другом конце большой стрелы, а другой конец малой стрелы зафиксирован на поддоне, элементы привода выполнены с возможностью приведения во вращение малой стрелы.
19. Интеллектуальная система доступа к пробам по п. 18, отличающаяся тем, что поддон включает корпус, фиксирующую стойку и магнит;
корпус поддона закреплен с другим концом малой стрелы и снабжен фиксирующей стойкой и магнитом с положительным полюсом;
крышка транспортировочного бокса снабжена отверстием для позиционирования, а фиксирующая стойка может быть вставлена в отверстие транспортировочного бокса, крышка транспортировочного бокса снабжена магнитом с отрицательным полюсом, магнит с отрицательным полюсом на крышке транспортировочного бокса и магнит с положительным полюсом на поддоне выполнены с возможностью взаимного притяжения.
20. Интеллектуальная система доступа к пробам по п. 19, отличающаяся тем, что элементы привода включают в себя электродвигатель, направляющую и каретку;
электродвигатель выполнен с возможностью приведения в движение каретки для выполнения подъема на направляющей, и один конец вращающегося вала закреплен на каретке, каретка выполнена с возможностью выдвигаться наружу и снабжена вращающимся валом; один конец вращающегося вала закреплен на направляющей, а другой выполнен с возможностью вращаться или неподвижно крепиться на малой стреле.
21. Интеллектуальная система доступа к пробам по любому из пп. 12-20, отличающаяся тем, что емкость для хранения проб включает в себя корпус, встроенный резервуар с жидким азотом, вращающуюся пластину, вращающийся вал и двигатель, корзину и крышку емкости;
верхняя поверхность корпуса емкости снабжена крышкой;
встроенный резервуар с жидким азотом расположен в корпусе емкости, а верхняя поверхность снабжена приемным баком;
двигатель приводит во вращение элементы вала, а нижний конец вращающегося вала расположен с возможностью вращения в приемном баке, вращающаяся пластина неподвижно установлена на периферии вращающегося вала, корзина расположена на вращающейся пластине;
вращающийся вал включает центральный и приемный валы, двигатель приводит в движение центральный вал, внутри центрального вала предусмотрена заполненная азотом полость, нижний конец центрального вала соединен соосно с приемным валом, причем нижний конец приемного вала расположен с возможностью вращения в приемном баке.
22. Интеллектуальная система доступа к пробам по п. 21, отличающаяся тем, что термоизоляционный слой предусмотрен внутри стенки корпуса емкости для хранения проб.
23. Интеллектуальная система доступа к пробам по п. 22, отличающаяся тем, что устройство для разморозки и сканер кодов дополнительно установлены в камере для извлечения, а устройство для разморозки расположено рядом с герметичным портом, сканер кодов установлен рядом с устройством для разморозки.
24. Интеллектуальная система доступа к пробам по п. 23, отличающаяся тем, что камера для извлечения дополнительно снабжена смотровым окном и съемной дверью.
| CN 112744497 A, 04.05.2021 | |||
| CN 113148417 A, 23.07.2021 | |||
| CN 112716256 A, 30.04.2021 | |||
| US 11199560 B2, 14.12.2021 | |||
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ИЗВЛЕЧЕНИЯ БОЛЬШИХ КОЛИЧЕСТВ ПРОБИРОК | 2015 |
|
RU2677987C2 |

