ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к машиностроению и приборостроению и может быть использовано в механических устройствах, реализующих дискретное движение выходного звена при непрерывном движении входного.
УРОВЕНЬ ТЕХНИКИ
Известны волновые передачи с роликовыми, дисковыми и кулачковыми генераторами волн внутреннего и кольцевыми генераторами волн внешнего деформирования [1].
Наиболее близким техническим решением является шаговая волновая передача [2], которая содержит гибкое колесо, генератор волн и жесткое колесо, состоящее из четырех зубчатых секторов, с которыми гибкое колесо последовательно образует двухволновую зубчатую передачу или волновую зубчатую муфту. При непрерывном вращении генератора волн, обеспечивающем в зоне одной пары зубчатых секторов жесткого колеса волновое зацепление, реализуется вращательное движение выходного звена, при зацеплении гибкого колеса со второй парой зубчатых секторов жесткого колеса, образующих с гибким колесом волновую зубчатую муфту, реализуется режим "выстоя" - выходное звено остается неподвижным. Таким образом, при непрерывном вращении входного звена реализуется дискретный режим вращения выходного звена.
Недостатками данного конструктивного решения являются высокие динамические нагрузки и интенсивный износ зубьев при переходе зоны зацепления зубьев гибкого колеса с зубьями жесткого колеса с одной пары секторов на другую, возникающие за счет разности угловых шагов зубьев секторов жесткого колеса. В этом случае мгновенное нагружение зубьев гибкого колеса снижает несущую способность и ресурс гибкого колеса и самой передачи.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является существенное снижение динамических нагрузок в зонах пересопряжения зубьев гибкого колеса на границах секторов жесткого колеса, снижение износа и повышение долговечности передачи.
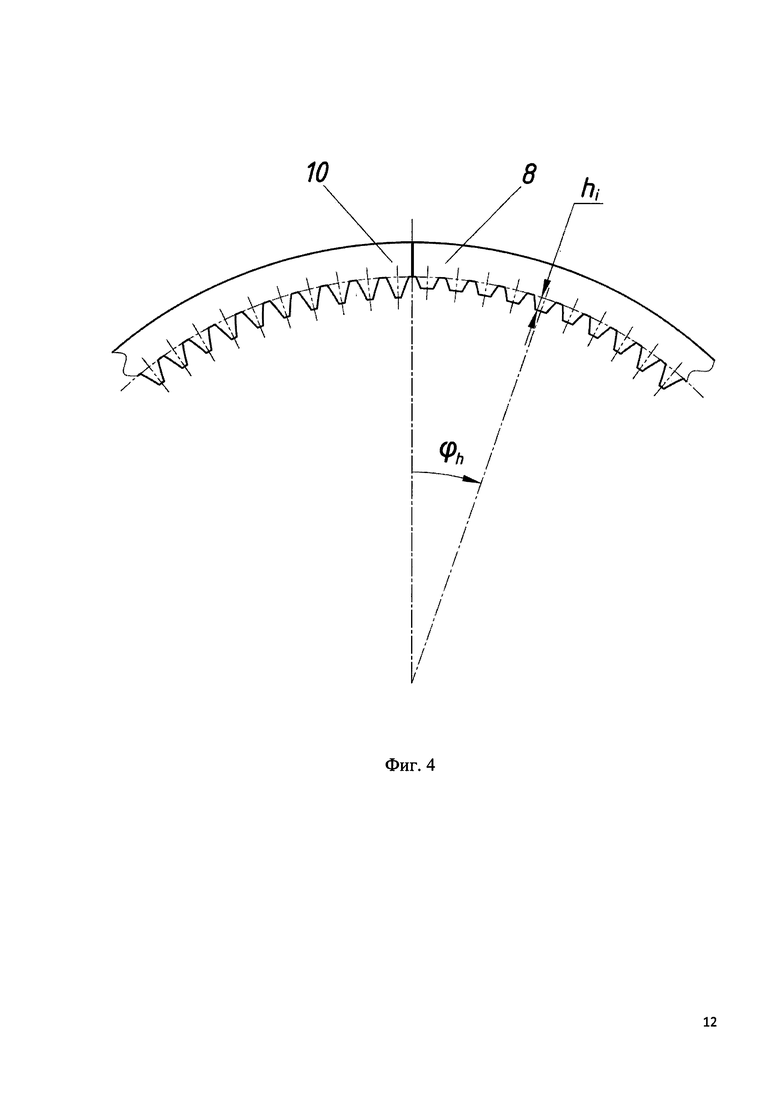
Технический результат достигается тем, что в зонах контакта секторов жесткого зубчатого колеса зубья секторов волной муфты выполнены переменной высоты hi, которая определяется из условия отсутствия заклинивания зубьев гибкого и жесткого колес от упора вершин зубьев колес при входе в зацепление, что обеспечивает безударное сопряжение зубьев гибкого колеса при переходе волны деформации (зоны зацепления) с одного сектора жесткого колеса на другой.
Таким образом, волновая передача прерывистого действия содержит гибкое колесо, генератор вол и жесткое колесо, состоящее из четырех зубчатых секторов. Одинаковые зубчатые секторы расположены диаметрально противоположно, причем одна пара секторов при зацеплении с гибким колесом образует волновую зубчатую передачу, а другая - волновую зубчатую муфту. При этом в зонах сопряжения секторов зубья секторов волновой муфты имеют переменную высоту. Высота зубьев определяется из условия отсутствия заклинивания зубьев гибкого и жесткого колес от упора вершин зубьев колес при входе в зацепление в зависимости от угла поворота ϕh генератора волн.
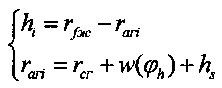
Переменные значения высоты hi зубьев определены следующими математическими формулами и зависимостями:
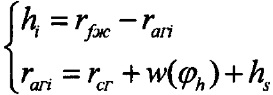
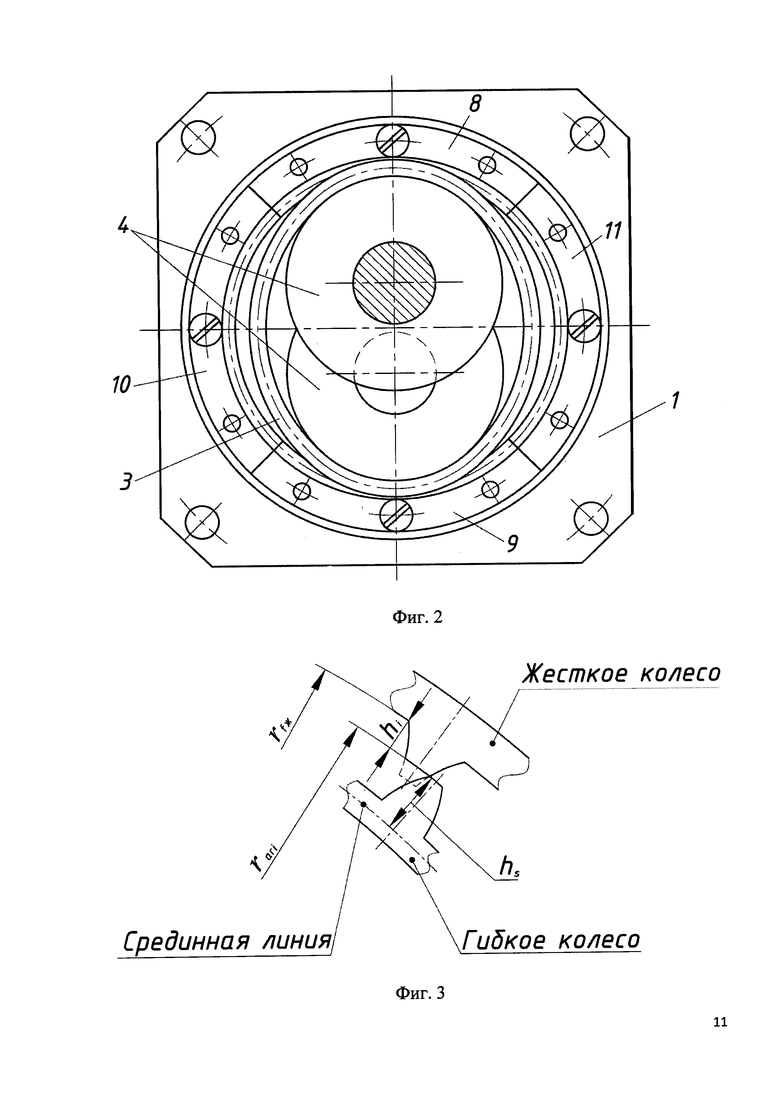
где  - окружность впадин жесткого колеса; raгi - окружность вершин деформированного гибкого колеса; rсг - радиус срединной линии недеформированного гибкого колеса;
- окружность впадин жесткого колеса; raгi - окружность вершин деформированного гибкого колеса; rсг - радиус срединной линии недеформированного гибкого колеса;  - радиальное перемещение точек срединной линии гибкого колеса; w0 - радиальная деформация гибкого колеса на большой оси деформации;
- радиальное перемещение точек срединной линии гибкого колеса; w0 - радиальная деформация гибкого колеса на большой оси деформации; 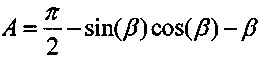 ,
,  - расчетные коэффициенты [4]; β - половина угла облегания гибкого колеса генератором волн; hs - кратчайшее расстояние от срединной линии до вершины зуба гибкого колеса; ϕh - угол поворота генератора волн.
- расчетные коэффициенты [4]; β - половина угла облегания гибкого колеса генератором волн; hs - кратчайшее расстояние от срединной линии до вершины зуба гибкого колеса; ϕh - угол поворота генератора волн.
ПЕРЕЧЕНЬ ФИГУР
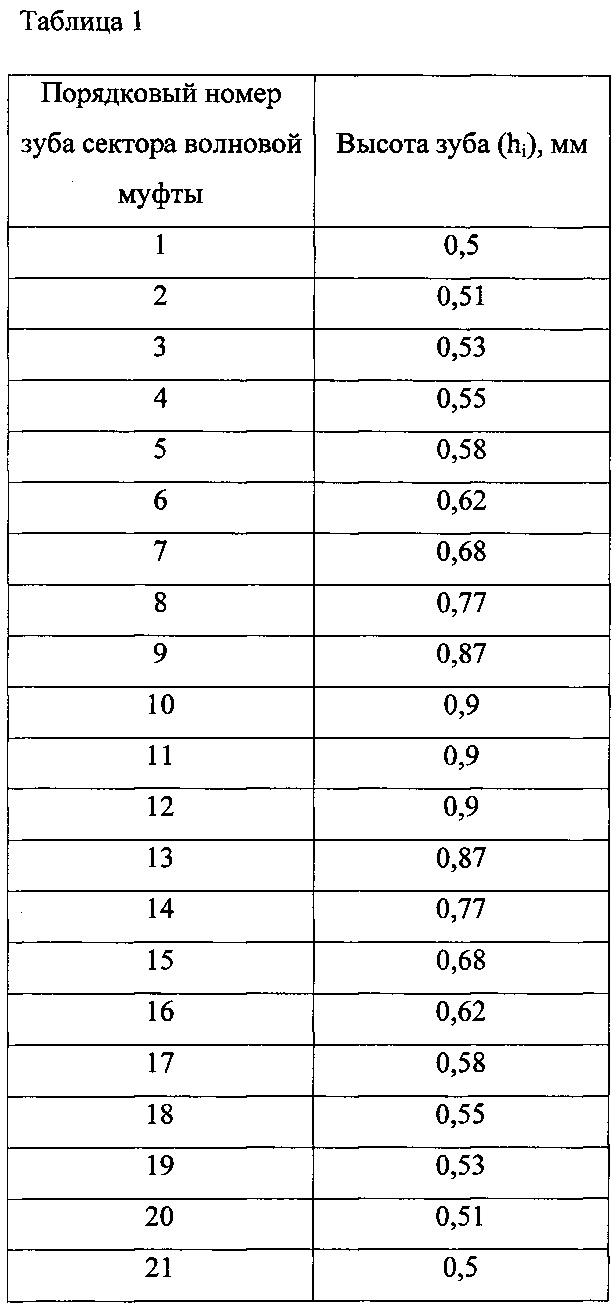
На фиг. 1 показан осевой разрез волновой передачи дискретного движения.
На фиг. 2 показан поперечный разрез волновой передачи дискретного движения.
На фиг. 3 показана расчетная схема для определения высоты зубьев.
На фиг. 4 показана конструкция соседних зубчатых секторов жесткого колеса.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 показан осевой разрез волновой передачи дискретного движения. В корпусе 1 и крышке 2 установлено гибкое колесо 3 на подшипниках 7, выполненное в виде стакана и являющееся выходным звеном передачи; внутри колеса 3 расположен дисковый генератор волн, состоящий из дисков 4, закрепленных на эксцентриковом валу 5; жесткое колесо 6 закреплено в корпусе 1. Диски 4 генератора волн придают гибкому колесу 3 форму двухвершинного овала (фиг. 2). Жесткое колесо 6 выполнено составным из четырех зубчатых секторов 8, 9, 10 и 11. Пара секторов 8 и 9, расположенных диаметрально противоположно, выполнена одинаковыми и имеет зубчатые венцы с угловыми шагами зубьев, равными угловому шагу зубьев гибкого колеса 3. Другая пара секторов 10 и 11, также расположенных диаметрально противоположно, выполнена одинаковыми и имеет зубчатые венцы с угловыми шагами зубьев, отличными от углового шага зубьев гибкого колеса 3. Зубчатые секторы 8 и 9 жесткого колеса 6 в зонах сопряжения имеют зубья переменной высоты (фиг. 4).
Передача работает следующим образом. При вращении генератора волн гибкое колесо 3 в зацеплении с секторами 10 и 11 образует двухволновую передачу (выходное звено осуществляет движение), а в зацеплении с секторами 8 и 9 - волновую муфту (выходное звено неподвижно). Таким образом, выходное звено 3 осуществляет прерывистое движение. При прохождении генератором волн зоны сопряжения секторов за счет переменной высоты зубьев секторов муфты обеспечивается безударный переход волны деформации гибкого колеса 3 и тем самым обеспечивается безударное чередование режимов движения и "выстоя" выходного звена. Методика расчета высоты hi зубьев (фиг. 3) базируется на основных положениях классической теории эвольвентного зацепления, используя условие отсутствия заклинивания зубьев гибкого и жесткого колес от упора вершин зубьев колес при входе в зацепление в зависимости от угла поворота ϕh генератора волн [3].
В качестве примера в таблице 1 приведены значения высоты зубьев сектора волновой муфты жесткого колеса со следующими геометрическими параметрами волновой передачи дискретного движения: число зубьев сектора волновой муфты zм=21, число зубьев сектора волновой передачи zж=22, число зубьев гибкого колеса zг=86, модуль зацепления m=0,4 мм, половина угла облегания гибкого колеса генератором волн β=30°.
Источники информации
1. Костиков Ю.В., Тимофеев Г.А., Фурсяк Ф.И. Новое в проектировании волновых зубчатых передач // Известия высших учебных заведений. Машиностроение. 2012. №12. С. 42-49.
2. Шаговая волновая передача. А.с. СССР №1260598, кл. F16H 1/00, 27/04, опубл. 30.09.86 // БИ 1986. №36.
3. Тимофеев Г.А., Подчасов Е.О. Исследование заклинивания в зацеплениях несиловых волновых передач // Известия высших учебных заведений. Машиностроение. 2016. №4. С. 16-21.
4. Шувалов С.А., Волков А.Д. Деформация гибкого зубчатого колеса волновой передачи двумя дисками // Известия высших учебных заведений. Машиностроение. 1971. №10. С. 44-49.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВАЯ ПЕРЕДАЧА ДИСКРЕТНОГО ДВИЖЕНИЯ | 2015 |
|
RU2588560C1 |
| Волновая зубчатая передача | 2017 |
|
RU2665977C1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Волновая зубчатая передача | 1981 |
|
SU1004689A1 |
| Волновая зубчатая передача | 1974 |
|
SU638770A1 |
| Волновая зубчатая передача | 1977 |
|
SU750182A1 |
| Приводной сферический шарнир | 1989 |
|
SU1646863A1 |
| Шестеренный насос | 1990 |
|
SU1784747A1 |
| Коммутирующее устройство | 1974 |
|
SU559293A1 |
| Ограничитель вращательного движения | 1983 |
|
SU1126749A1 |
Изобретение относится к области машиностроения, а более конкретно к зубчатым передачам. Жесткое колесо волновой передачи дискретного движения состоит из двух пар зубчатых секторов. В зонах контакта секторов жесткого зубчатого колеса зубья секторов волновой муфты выполнены переменной высоты hi. Одинаковые зубчатые секторы расположены диаметрально противоположно, причем одна пара секторов при зацеплении с гибким колесом образует волновую зубчатую передачу, а другая - волновую зубчатую муфту. При этом в зонах сопряжения секторов зубья секторов волновой муфты имеют переменную высоту. Переменные значения высоты hi зубьев могут быть определены математическими формулами и зависимостями. Достигается повышение долговечности передачи. 1 з.п. ф-лы, 4 ил.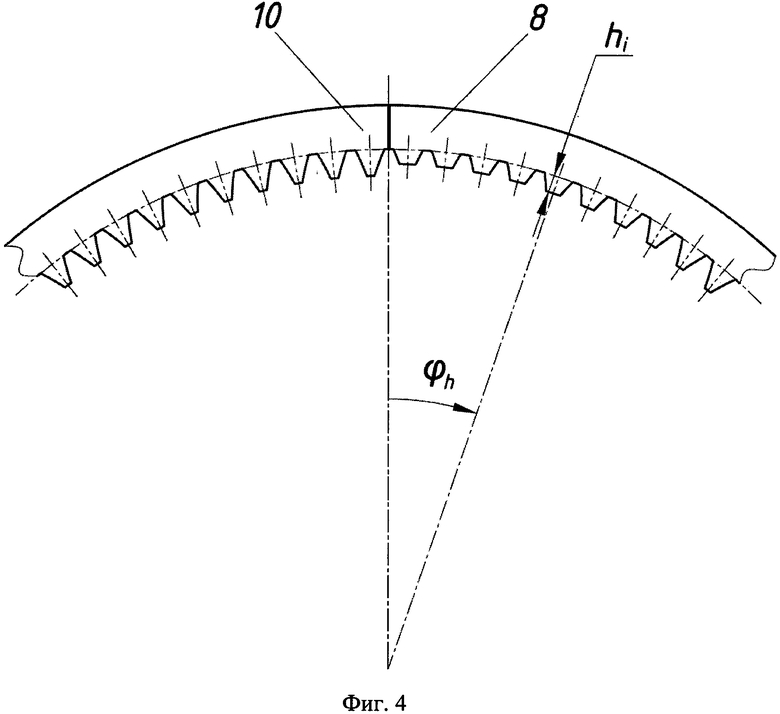
1. Жесткое колесо волновой передачи дискретного движения, состоящее из двух пар зубчатых секторов, одинаковых и диаметрально противоположно расположенных, причем одна пара зубчатых секторов образует с гибким колесом волновую передачу, а другая пара секторов - волновую зубчатую муфту, отличающееся тем, что в локальных областях относительно граничных линий между секторами жесткого колеса зубья секторов волновой муфты имеют переменную высоту hi, определяемую из условия отсутствия заклинивания зубьев гибкого и жесткого колес от упора вершин зубьев колес при входе в зацепление в зависимости от угла поворота ϕh генератора волн.
2. Жесткое колесо волновой передачи дискретного движения по п. 1, отличающееся тем, что переменные значения высоты hi зубьев определены следующими математическими формулами и зависимостями:
где  - окружность впадин жесткого колеса; rагi - окружность вершин деформированного гибкого колеса; rсг - радиус срединной линии недеформированного гибкого колеса;
- окружность впадин жесткого колеса; rагi - окружность вершин деформированного гибкого колеса; rсг - радиус срединной линии недеформированного гибкого колеса;  - радиальное перемещение точек срединной линии гибкого колеса; w0 - радиальная деформация гибкого колеса на большой оси деформации;
- радиальное перемещение точек срединной линии гибкого колеса; w0 - радиальная деформация гибкого колеса на большой оси деформации; 
 - расчетные коэффициенты; β - половина угла облегания гибкого колеса генератором волн; hs - кратчайшее расстояние от срединной линии до вершины зуба гибкого колеса; ϕh - угол поворота генератора волн.
- расчетные коэффициенты; β - половина угла облегания гибкого колеса генератором волн; hs - кратчайшее расстояние от срединной линии до вершины зуба гибкого колеса; ϕh - угол поворота генератора волн.
| Зубчатое колесо волновой передачи | 1987 |
|
SU1442772A1 |
| US 20040259674 A1, 23.12.2004 | |||
| Шаговая волновая передача | 1985 |
|
SU1260598A1 |
| US 3161081 A1, 15.12.1964 | |||
| US 4491033 A1, 01.01.1985. | |||

