Настоящее изобретение относится к способу автоматической идентификации базовой линии на изображении поверхностной сетки компонента, и в частности, хотя и не исключительно, относится к обнаружению переднего и заднего краев аэродинамических поверхностей, изображенных в сетках для имитационных моделирований вычислительной гидродинамики (CFD).
В гидродинамике используют вычислительную гидродинамику для моделирования потоков текучей среды. Поток текучей среды может быть моделирован путем создания модели геометрии интересующего объекта и домена потока текучей среды, связанного с этой геометрией, и последующего выполнения вычислений для моделирования потока текучей среды в пределах и вокруг этой геометрии, используя компьютер.
Трехмерная модель вычислительной гидродинамики может использовать сетку из ячеек для изображения домена потока текучей среды. Ячейки лицевыми поверхностями, причем лицевые поверхности разграничены краями, а края заканчиваются в узлах. Сетка для двухмерной модели вычислительной гидродинамики, или поверхностная сетка (то есть сетка на поверхности трехмерной модели, планарной или криволинейной) содержит только лицевые поверхности, края и узлы. В некоторых имитационных моделированиях требуется высокое разрешение (дискретность) сетки для обеспечения достаточного качества решения. Высокое разрешение сетки в результате приводит к большому числу ячеек. Типовая трехмерная модель содержит от несколько тысяч ячеек до многих миллионов ячеек.
Имитационное моделирование вычислительной гидродинамики, в общем, использует методы конечных объемов для дискретизации численного моделирования (на сетке) потока по сетке.
Моделирование турбулентности является важным при выборе метода численного моделирования. В отличие от ламинарного потока, турбулентный поток отличается завихрениями и закрутками, которые взаимодействуют друг с другом для создания комплексного рисунка динамического потока. Как результат, турбулентность является трудной для моделирования.
Хотя и можно выполнять моделирование без применения модели турбулентности путем использования методов прямого численного моделирования (DNS), это крайне дорогой метод, поскольку он требует очень высокого разрешения сетки для отображения всех деталей рисунков турбулентности. Менее дорогие опции используют модель турбулентности для моделирования или аппроксимирования эффекта турбулентности.
Несколько таких методов численного моделирования обычно доступны и хорошо известны из предшествующего уровня техники, например приближения по методам Reinolds-averaged Navier Stokes (RANS) (метод с использованием усредненных по Рейнольдсу уравнений Навье Стокса), Detached Eddy Simulation (DES) (моделирование турбулентности, объединяющее методы RANS и LES) и Large Eddy Simulation (LES) (моделирование методом крупных вихрей). Специалист в области гидродинамики может выбрать метод численного моделирования и разрешение сетки в соответствии с физикой моделируемого потока, требуемого качества моделирования, расходов на вычисление и усилий и искусства, требуемого от специалиста в области гидродинамики на реализацию моделирования, среди всего прочего.
Специалист в области гидродинамики может регулировать параметры моделирования вычислительной гидродинамики путем изменения граничных условий, например температуры стенки или входной скорости потока канала. Кроме того, известно ручное вмешательство в моделирование путем регулирования параметров решения вычислительной гидродинамики (например, скорости генерирования турбулентности) на лицевых поверхностях или ячейках сетки, для усиления некоторых свойств потока.
Например, специалист в области гидродинамики может иметь доступ к эмпирическим данным, относящимся к положению на аэродинамической поверхности, на которой имеет место переход между ламинарным и турбулентным потоком. Эти данные могут быть доступными для специальной аэродинамической поверхности и рабочих параметров или могут иначе находиться в модели перехода, которая способна предсказать точку перехода на основе входных переменных и эмпирически полученных тенденций (трендов).
Местоположение точки перехода является важным фактором в определении поведения потока и рабочих характеристик аэродинамических поверхностей, но является трудным для точного предсказания при использовании модели турбулентности вычислительной гидродинамики.
Поэтому у специалиста в области гидродинамики может быть желание применения эмпирически полученной точки перехода к аэродинамической поверхности при моделировании вычислительной гидродинамики. У него может быть желание о предписании (предсказания) фиксированной точки перехода на аэродинамической поверхности или другой характерной части аэродинамической поверхности, в которой модель перехода может быть использована для предсказания точки перехода, основываясь на критериях локального течения (потока).
Кроме того, специалист в области гидродинамики или другой специалист может захотеть идентифицировать нелокальные геометрические элементы компонента при моделировании и предсказывать местоположение или область на этом компоненте в отношении этих нелокальных элементов для различных целей, например для использования в модели в рамках этого моделирования.
Хотя автоматизированные средства проектирования (CAD) могут использовать ряд параметров, например протяженность, кривизну и местоположения переднего и заднего краев для ограничения формы аэродинамической поверхности, или другой глобальной информации, например поверхности NURBS (Non-Uniform Rational Basis Spline - неравномерный рациональный В-сплайн), моделирование вычислительной гидродинамики, в общем, не имеет доступа к этому типу глобальной информации и основное геометрическое ограничение компонента не доступно для решающей программы вычислительной гидродинамики.
Моделирование вычислительной гидродинамики многократно решает уравнения численного моделирования в узлах, лицевых поверхностях или ячейках сетки, которые представляют геометрию, и необходимо знать только основные свойства потока, например скорости и температуры стенки, которые хранятся в моделировании в каждой итерации и получаются из граничных условий. Таким образом, чтобы работать, моделированию не обязательно нужно знать, какие части сетки соответствуют геометрическим элементам, например, переднего края аэродинамической поверхности.
Подпрограммы решающей программы, обычно, устроены так, чтобы вычисления, выполняемые на конкретной ячейке или узле, были основаны на значениях, фиксируемых в соседних ячейках или узлах, и, таким образом, моделированию необходимо знать локальную информацию, относящуюся к сетке, например связность сетки.
Соответственно, требуется способ автоматической идентификации геометрических элементов поверхностной сетки аэродинамического профиля при использовании информации о локальной сетке, доступной в моделировании.
Кроме того, требуется способ ограничения местоположения или зоны на поверхностной сетке аэродинамического профиля относительно этих геометрических элементов для использования в моделировании.
Известный на сегодняшний день способ определения геометрических элементов, местоположений и зон на аэродинамическом профиле требует структурированной сетки.
Структурированная двухмерная или трехмерная сетка упорядочена так, чтобы связность, соответственно, соответствовала регулярному двухмерному или трехмерному массиву. Структурированная сетка, таким образом, ограничена так, что содержит четырехугольные поверхности в двухмерных и шестиугольных ячейках в трехмерных сетках. Вследствие регулярной связности соседний элемент первого узла может легко определяться положением первого узла в массиве.
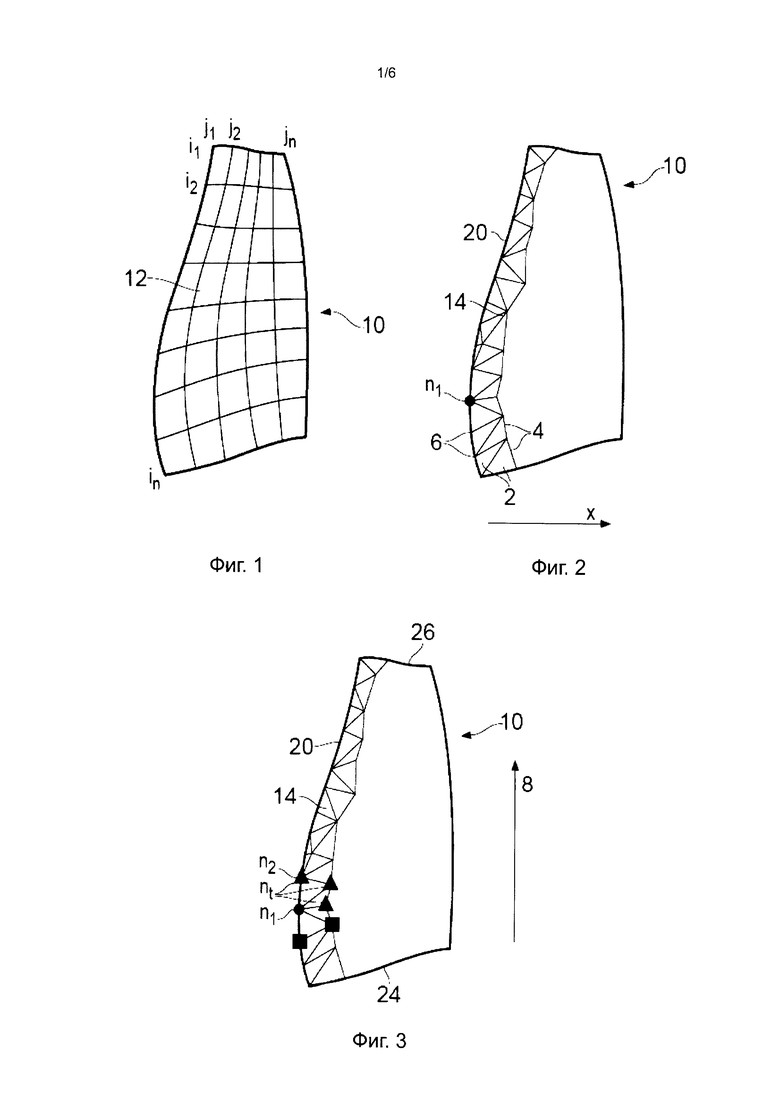
Как показано на фиг.1, структурированная поверхностная сетка на поверхности аэродинамического профиля может содержать ряды узлов i1, i2…in по направлению хорды (поперек) профиля и столбцы узлов i1, i2…in по направлению размаха (вдоль) профиля.
Эта глобальная индексация структурированных сеток означает, что ряды и столбцы узлов, по существу, соответствующие геометрическим элементам, например, переднего или заднего края аэродинамического профиля, могут быть определены индексом массива сетки.
Известный способ определения местоположения или геометрического элемента на аэродинамическом профиле для использования при моделировании предусматривает этапы:
1. Опрос вручную сетки для идентификации индекса массива i) столбца по направлению размаха профиля или ii) ряда узлов по хорде профиля, соответствующих желаемому местоположению I) ряда по направлению хорды или ii) столбца по направлению размаха на аэродинамическом профиле;
2. Если должна быть выбрана зона, то повторение этапа 1 для идентификации индексов массива, соответствующих узлам, которые разграничивают требуемую зону;
3. Установление связи индекса или индексов массива для моделирования, чтобы определить местоположения или геометрический элемент, представляющий интерес.
Однако этот способ может быть использован только в том случае, если сетка является структурированной сеткой.
Кроме того, для определения элемента, местоположения или зоны требуется значительная величина входного и ручного опроса сетки специалистом-пользователем, что приводит к тому, что этот способ является дорогим при использовании.
Пользователю требуется определить элемент, местоположение или зону вручную, что может оказаться крайне трудоемкой операцией для моделирований множественных аэродинамических профилей, например, набора лопастей в газотурбинном двигателе. Кроме того, взаимодействие пользователя, требуемое известным способом, препятствует выполнению полностью автоматизированного цикла анализа, предусматривающего этапы автоматического создания и/или усложнение геометрии, определения местоположения или элемента на аэродинамическом профиле и выполнения моделирования. Такие полностью автоматизированные циклы анализа становятся крайне важными в области техники оценки серии аэродинамических профилей, или в автоматизированных процедурах оптимизации проектирования, в которых может автоматически создаваться профиль аэродинамической поверхности.
Кроме того, технологические операции и вычисления, выполняемые пользователем и связанные с сеткой вычислительной гидродинамики, не основаны на интуитивной технологии или реальных переменных. Например, пользователь может захотеть определить местоположение на основе доли хорды аэродинамического профиля, однако он ограничен иметь дело с индексами массива, соответствующими местоположениям сетки. В таком случае, способ также предрасположен (ведет) к ошибкам пользователя и труден для контроля. Способ, в частности, труден для многоблочных сеток (описываемых ниже), поскольку направления индексации изменяются на поверхности раздела блоков.
Чтобы получить сетки для комплексной геометрии, множественные блоки (М-В) часто используют для деления домена на более простые домены, например используя g код Rolls-Royce PADRAM: Shahpar, S., and Lapworth, L., "PADRAM: Parametric Design and Rapid Meshing System for Turbomachinary Optimisation", ASME GT2003-38698, Atlanta, Georgia, 2003.
Основной проблемой для многоблочных структурированных сеток является трудность для получения сеток для сложных геометрий и длительность времени, затрачиваемого инженерами, создающими многоблочные топологии. Создание многоблочных структур может оказаться очень трудоемким и иногда невозможным.
Альтернативой является использование неструктурированной сетки. Трехмерная неструктурированная сетка может содержать тетраэдральные, четырехугольные и/или другие многоугольные ячейки. Двухмерная неструктурированная сетка или неструктурированная поверхностная сетка может содержать треугольники, четырехугольники и/или другие многоугольные лицевые поверхности. В отличие от структурированных сеток, неструктурированная сетка отличается нерегулярной связностью. Связность соседних узлов и ячеек не обязательно соответствует соседним положениям в массиве. Соответственно, для определения связности требуется структура отдельного массива.
На предшествующем уровне техники хорошо известно, что значительно проще генерировать неструктурированные сетки, чем структурированные сетки. Неструктурированные сетки дают инженеру большую геометрическую гибкость. Однако точная ручная идентификация элементов, например переднего и заднего краев на неструктурированных сетках, крайне трудна и трудоемка.
В соответствии с первым аспектом настоящего изобретения обеспечивается способ определения базовой линии на поверхностной сетке компонента для использования в моделировании, причем поверхностная сетка содержит узлы, взаимосвязанные краями, при этом способ предусматривает
a) определение базовой системы координат, включающей в себя направление X;
b) определение переменной размаха (протяженности) профиля, которая монотонно изменяется вдоль компонента по ходу прямого движения в направлении, которое не совпадает с направлением X;
c) выбор первого фронтального узла на базовой линии;
d) использование алгоритма фронта Парето для определения базовой линии на оконечности поверхностной сетки относительно направления X, причем в алгоритме фронта Парето, который оценивает критерий для подчиненных узлов и оперирует с переменной Парето для выбора последовательных фронтальных узлов, образующих базовую линию, переменной Парето является координата X, а критерием для подчиненных узлов является величина размаха, которая меньше величины для выбранного фронтального узла n1.
Первый фронтальный узел может быть экстремумом поверхностной сетки относительно координаты X.
Фронты Парето известны в области оптимизации, в частности многокритериальной или многокритериальной векторной оптимизации, в которой оптимальный выход системы ищут, в то время как изменяют другие параметры. Максимум или минимум переменной Парето ищут вдоль фронта, то есть, когда фронт монотонно движется вдоль компонента в прямом направлении движения, благодаря выбору последовательных фронтальных узлов.
В соответствии со вторым аспектом настоящего изобретения разработан способ идентификации базовой линии на поверхностной сетке компонента для использования в моделировании, причем поверхностная сетка содержит узлы, взаимосвязанные краями, причем способ включает в себя этапы
a) определение базовой системы координат, включающей в себя направление X;
b) определение критерия поиска координаты Х как минимума или максимума;
c) определение нормализованной переменной размаха, которая монотонно изменяется вдоль компонента в другом направлении, чем направление X, и присваивание (приписывание) величин нормализованной переменной размаха всем узлам на поверхностной сетке компонента;
d) определение прямого направления движения;
e) определение местонахождения и выбор узла n1 из набора всех узлов N на поверхностной сетке, причем узел n1 удовлетворяет критерию поиска для координаты Х в наибольшей степени;
f) назначение узла n1 для набора узлов Nd, соответствующего базовой линии;
g) идентификацию набора узлов Nt, которые имеют нормализованную переменную размаха, соответствующую такому же положению по направлению размаха профиля или положению в направлении по размаху профиля при движении к узлу n1 относительно прямого направления движения, и соединены с узлом n1 посредством края;
h) выбор узла n2 из набора узлов Nt, причем узел n2 удовлетворяет критерию поиска координаты Х в наибольшей степени;
i) добавление узла n2 к набору узлов Nd, соответствующих базовой линии;
j) переопределение узла n1 как текущего выбранного узла n2 и повторение этапов (g)-(j) Для выбора последовательных узлов n2.
Базовую линию образуют из последовательных фронтальных узлов и соответствующих взаимосвязанных краев между ними.
Настоящее изобретение имеет особое применение в моделировании потока по аэродинамическим профилям, в котором направление движения является направлением в продольном направлении (по длине) аэродинамического профиля, а направление в направлении хорды является направлением между передним и задним краями аэродинамического профиля. Настоящее изобретение также применимо к другим компонентам, иным, чем аэродинамические профили. Однако для простоты описания ссылки на размах (протяженность) и хорду, обычно, используют в этом описании для обозначения двух, в основном, перпендикулярных направлений на поверхности компонента.
Базовая координатная система может быть нижележащей координатной системой сетки или компонента или любой их проекции.
Направление вдоль размаха профиля может быть квазиортогональным или ортогональным направлению X.
Нормализованная переменная размаха может изменяться от первого значения на первой заранее заданной границе до второго значения на второй заранее заданной границе. Первое и второе значения могут быть 0 и 1, соответственно.
Критерием для определения того, лежит ли узел n2 на заранее заданной границе, может быть величина нормализованной переменной размаха.
Способ, согласно второму аспекту настоящего изобретения, может дополнительно включать в себя этапы реверсирования направления движения вперед; выбора узла n1 из любого из набора узлов Nd, соответствующих базовой линии; и повторение этапов от (g) до (j). Узел n1 также может быть выбран как предварительно выбранный узел n2 или переопределен при использовании критерия поиска для направления Х с помощью повторяющегося этапа (е).
Края поверхностной сетки могут определять лицевые поверхности.
Заранее заданная граница или одна из заранее заданных границ поверхностной сетки может быть локализована посредством идентификации краев в поверхностной сетке, которые соответственно соединены только с одной лицевой поверхностью, и, таким образом, лежат на периферии поверхностной сетки.
Заранее заданная граница или одна из заранее заданных границ поверхностной сетки может быть локализована на основе скорости изменения нормалей лицевой поверхности между смежными лицевыми поверхностями. Например, вершина лопасти (лопатки) или аэродинамического профиля может иметь высокую скорость изменения нормалей лицевой поверхности между смежными лицевыми поверхностями.
В соответствии с третьим аспектом настоящего изобретения обеспечивается способ идентификации первой и второй базовых линий на поверхностной сетке компонента для использования в моделировании, причем поверхностная сетка компонента имеет две заранее заданные границы, причем первую и вторую базовые линии идентифицируют независимо посредством способа, соответствующего второму аспекту настоящего изобретения, при этом критерий поиска для координаты Х определяют, соответственно, как минимум и максимум, первая и вторая базовые линии пересекают заранее заданные границы и делят поверхностную сетку компонента на первую и вторую части.
В соответствии с четвертым аспектом настоящего изобретения обеспечивается способ определения, по меньшей мере, одной части на поверхностной сетке компонента для использования в моделировании, в котором хордовая переменная определена для изменения между первой и второй базовыми линиями, причем первую и вторую базовые линии идентифицируют с помощью способа, соответствующего третьему аспекту настоящего изобретения, в котором критерий для каждой части выражен на основе диапазонов в направлении хорды и/или в направлении размаха (протяженности).
Каждая часть может быть точкой, линией или зоной на поверхностной сетке компонента.
Компонент может быть аэродинамическим профилем. Направление Х может соответствовать, главным образом, направлению сверху вниз по направлению движения относительно компонента аэродинамического профиля. Переменная по размаху (протяженности) может изменяться в направлении протяженности относительно компонента аэродинамического профиля.
Две заранее заданные границы поверхностной сетки аэродинамического профиля могут быть определены как основание и вершина, соответственно, на основе координат соответствующих границ. Например, основание аэродинамического профиля в газовой турбине имеет меньшую радиальную координату, чем вершина.
Основание аэродинамического профиля в газовой турбине может соответствовать месту соединения лопатки (аэродинамического профиля) с плоским кольцом. Основание аэродинамического профиля для самолета может соответствовать месту соединения крыла и фюзеляжа.
В соответствии с пятым аспектом настоящего изобретения разработан способ применения модели для моделирования, причем модель требует выбора части поверхностной сетки аэродинамического профиля, часть поверхностной сетки аэродинамического профиля выбирают с помощью способа, соответствующего четвертому аспекту настоящего изобретения.
Модель может быть моделью перехода, а моделирование может быть моделированием вычислительной гидродинамики.
Модель перехода может использовать локальные значения параметров потока, предсказанные посредством моделирования вычислительной гидродинамики для предсказания точки перехода на участке, причем участок является зоной на поверхностной сетке аэродинамического профиля.
Модель перехода может определить целостность части, имеющей параметры ламинарного потока, причем часть является зоной на поверхностной сетке аэродинамического профиля.
Модель перехода может определять то, что переход имеет место в предопределенной части, причем часть является линией на поверхностной сетке аэродинамического профиля.
Способ, соответствующий третьему, четвертому или пятому аспектам настоящего изобретения, в котором компонент является аэродинамическим профилем, может дополнительно включать в себя следующие этапы:
a) вычисление площади первой части поверхностной сетки;
b) вычисление площади второй части поверхностной сетки;
c) определение части поверхностной сетки с большей площадью как стороны низкого давления;
d) определение части поверхностной сетки с меньшей площадью как стороны повышенного давления.
Соответствующие площади первой и второй частей могут быть вычислены посредством
a) выбора узла на поверхностной сетке, который не лежит на первой или второй базовой линии, и назначение этого узла набору узлов S1;
b) идентификации узлов, соединенных с узлами в наборе S1, и назначение этих узлов набору узлов S1, если они не лежат на первой или второй базовой линии или заранее заданной границе поверхностной сетки;
c) повторения этапа b) до тех пор, пока дополнительные узлы не могут быть назначены набору узлов S1;
d) назначение всех узлов, которые не назначены набору узлов S1, набору узлов S2, если они не лежат на первой и второй базовой линии или заранее заданной границе поверхностной сетки;
e) суммирование площадей лицевых поверхностей сетки, определенных узлами, принадлежащими наборам S1 и S2, соответственно.
Модель перехода в соответствии с пятым аспектом настоящего изобретения может вести себя иначе в зависимости от того, находится ли часть поверхности аэродинамического профиля на стороне повышенного давления или на стороне низкого давления аэродинамического профиля.
Значение хордовой переменной может быть вычислено в каждом узле, используя дискретизированное уравнение Пуассона. Хордовая переменная может быть нормализована. Хордовая переменная может изменяться от первого значения на первой базовой линии до второго значения на второй базовой линии. Первое и второе значения могут быть равны 0 и 1, соответственно.
Значения переменной по размаху (протяжности) могут быть вычислены на каждом узле, используя дискретизированное уравнение Пуассона.
Значение переменной по размаху или хордовой переменной на каждом узле может быть найдено путем дискретизации уравнения Пуассона для размаха (интервала) или хорды, соответственно. Дискретизация может быть краевой дискретизацией. Значение нормализованной переменной размаха или переменной хорды может быть найдено при использовании любой схемы итерации (например, сопряженных градиентов) или путем непосредственного обращения матриц.
Настоящее изобретение может содержать любую комбинацию параметров и/или ограничений, на которые делается ссылка в этой заявке, за исключением комбинаций таких параметров, которые являются взаимоисключающими.
Способ в соответствии с настоящим изобретением исключает требование к пользователю проводить вручную опрос поверхностной сетки компонента для определения базовой линии, местонахождения или зоны на поверхностной сетке.
Способ в соответствии с настоящим изобретением может работать как на структурированных, так и на неструктурированных сетках.
Способ в соответствии с настоящим изобретение может интерпретировать критерий для определения зоны или местоположения поверхностной сетки компонента на основе значимых переменных или терминов, например доля хорды или размаха (протяженности), в противоположность требованию специальных показателей сетки.
Способ в соответствии с настоящим изобретением может автоматически обнаруживать передний край и задний край поверхностной сетки аэродинамического профиля и разделять поверхностную сетку аэродинамического профиля на сторону низкого давления и сторону повышенного давления, используя только локальную информацию из неструктурированной или структурированной сетки в отсутствие глобальной информации о геометрии, например поверхностей неравномерного рационального би-сплайна (NURBS).
Моделирование вычислительной гидродинамики, которая основана на знании местонахождения базовых линий, соответствующих геометрическим элементам, например переднего края и заднего края аэродинамического профиля, может использовать способ в соответствии с настоящим изобретением, для создания этой информации, доступной решающему устройству.
Для лучшего понимания настоящего изобретения и для иллюстрации того, как достигается результат на примере его реализации, далее будут делаться ссылки на сопроводительные чертежи, где
фиг.1 показывает структурированную поверхностную сетку на аэродинамическом профиле,
фиг.2 показывает часть неструктурированной поверхностной сетки на аэродинамическом профиле,
фиг.3 показывает алгоритм фронта Парето, работающий на поверхностной сетке на фиг.2,
фиг.4 показывает массивы локальной связности для модулей поверхностных сеток;
фиг.5 соответствует фиг.3, но показывает дополнительный этап в работе алгоритма фронта Парето,
фиг.6 соответствует фиг.3, но иллюстрирует еще один дополнительный этап в работе алгоритма фронта Парето,
фиг.7 соответствует фиг.3, но алгоритм фронта Парето работает в направлении, обратном прямому направлению движения,
фиг.8 показывает вторую базовую линию, идентифицированную на заднем крае поверхностной сетки аэродинамического профиля на фиг.2,
фиг.9 показывает заранее заданную границу на основании поверхностной сетки аэродинамического профиля на фиг.2,
фиг.10 показывает заранее заданную границу на вершине поверхностной сетки аэродинамического профиля на фиг.2,
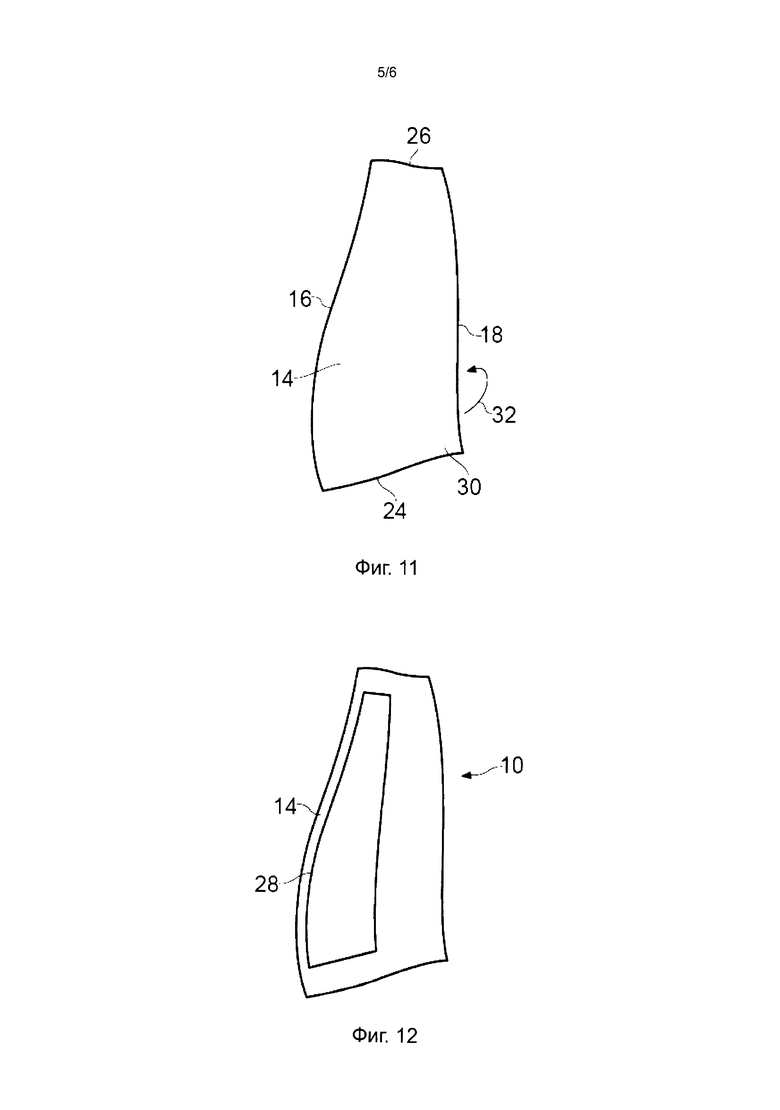
фиг.11 представляет первую и вторую базовые линии на переднем и заднем краях и заранее заданных границах на основании и вершине поверхностной сетки аэродинамического профиля на фиг.2,
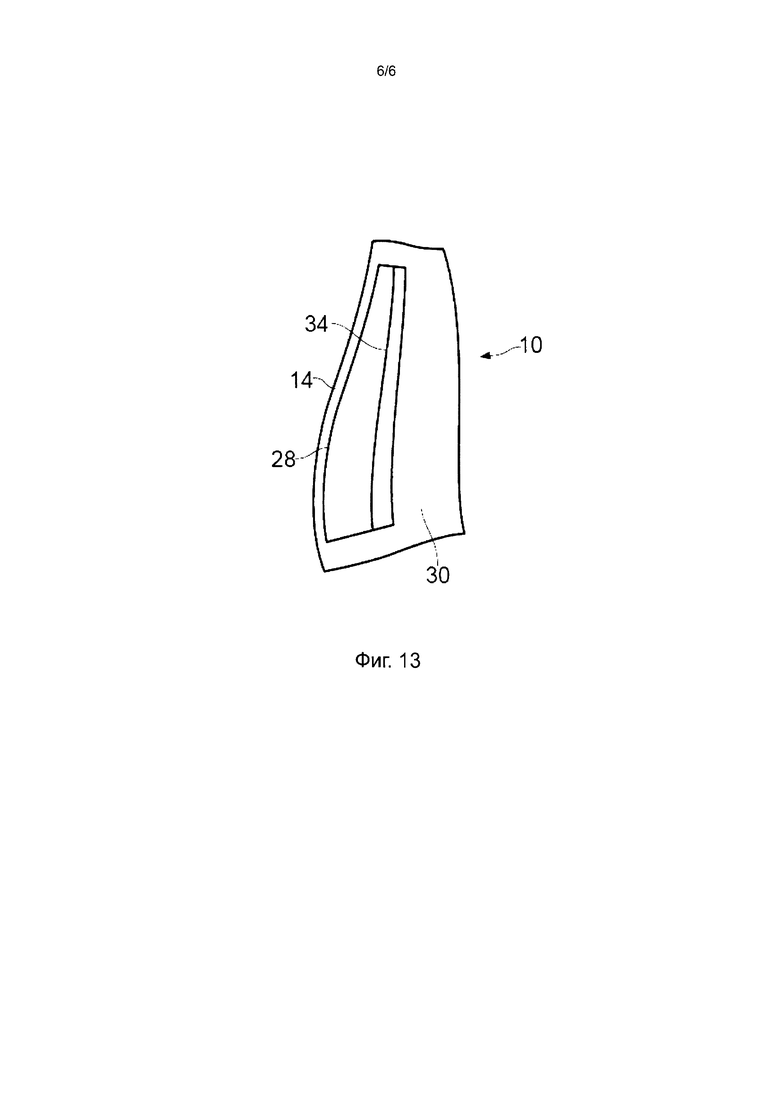
фиг.12 соответствует фиг.11 и показывает часть, определенную на стороне низкого давления поверхностной сетки 14 аэродинамического профиля;
фиг.13 соответствует фиг.12 и показывает точку перехода, определенную моделью перехода, на участке поверхностной сетки аэродинамического профиля.
Пример способа, соответствующий настоящему изобретению, описан со ссылкой на пример поверхностной сетки 14 аэродинамического профиля 10, изображенного на фиг.2. Поверхностная сетка 14 является неструктурированной сеткой с нерегулярной связностью. Поверхностная сетка 14 содержит множество лицевых поверхностей 2, каждая лицевая поверхность содержит множество краев 4, каждый из которых заканчивается в узлах 6.
На фиг.2 показано направление X, соответствующее главным образом сверху вниз по направлению потока текучей среды поверх аэродинамического профиля 10.
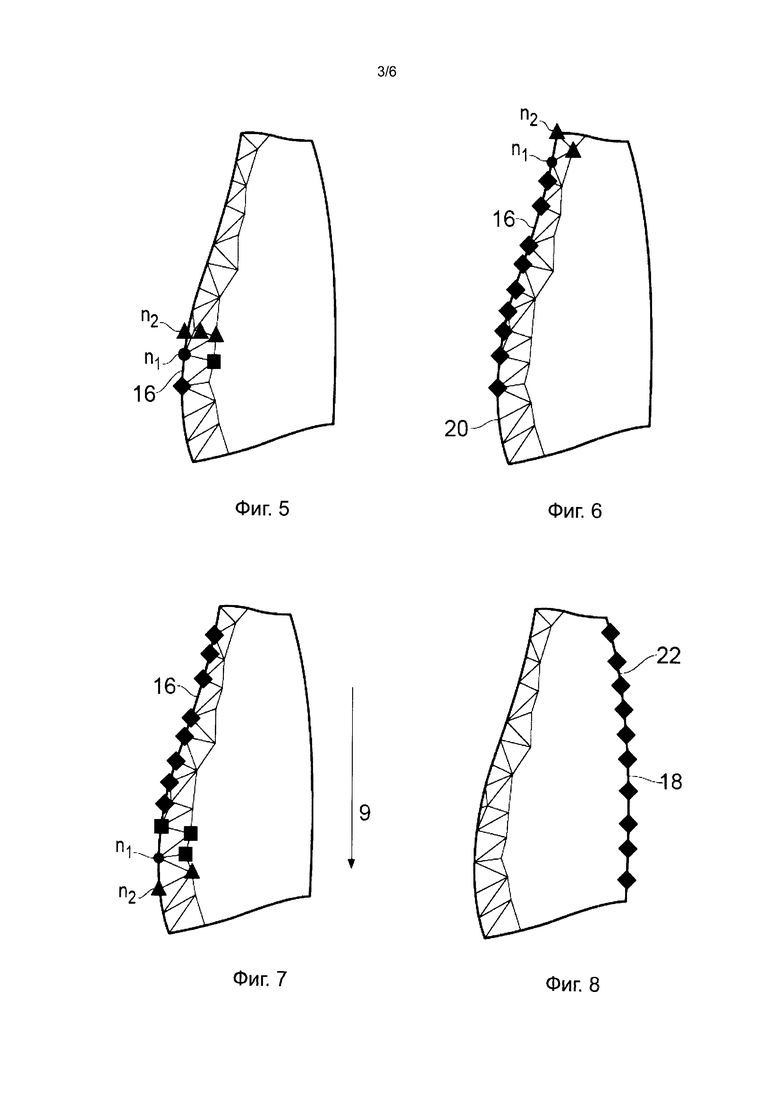
Критерий поиска координаты Х вначале определяется как минимум. На фиг.2 показывает узел n1, который выбран как узел на поверхностной сетке 1, который в наибольшей степени удовлетворяет критерию поиска координаты X, и, следовательно, это узел, который находится дальше всех вверху по относительно направления X. Узел n1 является первым узлом на базовой линии 16 или фронте Парето (фиг.5-7). Поскольку направление X, которое было выбрано, соответствует главным образом направлению сверху вниз, узел n1 с минимальной координатой Х лежит главным образом на геометрическом переднем краю 20 аэродинамического профиля 10.
Узел n1 назначен для набора узлов Nd, представляющего базовую линию или фронт Парето.
На фиг.3 представлен метод фронта Парето, который начинается в исходном фронтальном узле n1 и продвигается вдоль фронта Парето до тех пор, пока не будет описана базовая линия 16 (фиг.5-7), главным образом соответствующая переднему краю 20.
Нормализованная переменная по размаху (протяженности) профиля определяется во всех узлах на поверхностной сетке на фиг.3. Нормализованная переменная по размаху профиля изменяется от 0 до 1 в направлении вдоль направления размаха профиля от основания 24 до вершины 26 поверхностной сетки 14 аэродинамического профиля. Величина нормализованной переменной размаха равна нулю во всех узлах на заданной периферии 24 основания и равна 1 во всех узлах на заранее заданной периферии 26 вершины. Величина нормализованной переменной размаха в каждом узле задает дробное расстояние каждого узла между основанием 24 и вершиной сетки.
Величина нормализованной переменной по размаху во всех других узлах на поверхностной сетке управляется уравнением Пуассона.
Прямое направление движения показано стрелкой 8 на фиг.3 и определяется как, главным образом, движение в направлении вдоль размаха от основания 24 до вершины 26.
Нормализованные величины по размаху используют для контроля продвижения фронта Парето и установки критерия окончания фронта Парето.
Узлы с нормализованной переменной по размаху, соответствующие положению в направлении размаха профиля меньше узла n1 относительно прямого направления движения, определяются как подчиненные узлы, означая, что они не могут принадлежать базовой линии или фронту Парето.
Узлы с нормализованной переменной по размаху, соответствующие одинаковому положению в направлении по размаху профиля или положению переднего узла n1 в направлении по размаху относительно прямого направления движения, определяются как неподчиненные узлы.
На фиг.3 показан узел, соединенный с фронтальным узлом n1. Неподчиненные узлы обозначены треугольниками. Подчиненные узлы обозначены квадратами. Текущий фронтальный узел n1 обозначен кругом.
Связность узла ni может быть оценена путем опроса массивов связности, связанных с узлом ni. Массив f2n связности содержит узлы в вершинах лицевой поверхности. Массив f2e связности содержит края, образующие периферию лицевой поверхности. Массив f2f связности содержит соседние лицевые поверхности лицевой поверхности. Массив е2n связности содержит узлы на концах края. Пример набора массивов связности показан на фиг.4 в качестве примера набора четырехугольных лицевых поверхностей. Очевидно, что подобные массивы существуют для треугольных или многоугольных лицевых поверхностей. Эти массивы - обычно используемые массивы связности, но могут быть использованы любые пригодные массивы связности.
Три узла nt, показанных на фиг.3, являются заданными узлами, которые соединены с узлом n1 краем, и являются также неподчиненными узлами. Эти узлы могут быть названы заданными узлами, поскольку один из них будет следующим узлом n2 на базовой линии 16 фронта Парето.
Поскольку критерий поиска для направления Х является минимумом, то узел n2, который выбран из заданных узлов, является узлом с наименьшей координатой X.
Как только выбран узел n2, алгоритм движения продолжается вдоль фронта Парето или базовой линии 16 путем переопределения нового фронтального узла n1 как текущего выбранного узла n2, как показано на фиг.5. Предшествующий фронтальный узел указан ромбовидным символом.
Вышеописанные этапы способа повторяют для регистрации фронтальных узлов на базовой линии 16 или фронте Парето (то есть для их назначения в набор узлов Nd), и идентифицируют последующие фронтальные узлы. Эти этапы повторяют до тех пор, пока не выбран узел n2, который лежит на заранее заданной границе 26, как показано на фиг.6, в точке которой оканчивается алгоритм движения в направлении движения вперед.
Поскольку нормализованная переменная по размаху была определена так, чтобы все узлы на заранее заданной границе 26 вершины поверхностной сетки 14 аэродинамического профиля имели величину, равную единице, критерием для определения того, лежит ли узел n2 на заранее заданной границе 26, является нормализованная переменная по размаху, равная единице.
Как только граница 26 достигнута, алгоритм движения возвращается к исходному фронтальному узлу 12, показанному на фиг.7 в виде круга. Прямое направление движения переопределено в обратном направлении, показанном на фиг.7 стрелкой 9.
Таким образом, фиг.7 показывает алгоритм движения, продолжающийся до выбора последовательных узлов n2 в направлении от вершины 23 до основания 24, то есть в направлении уменьшения размаха профиля. Хотя, как упоминалось выше, первый узел n1 для алгоритма обратного движения является исходным узлом n1, который удовлетворяет критерию поиска для координаты Х в наибольшей степени, может стать первым узлом n1 алгоритма обратного движения для любых фронтальных узлов nd, выбранных предварительно.
Алгоритм движения продолжается до тех пор, пока не выбран вновь выбранный узел n2, который лежит на предопределенной границе 24 основания, в точке которого оканчивается алгоритм движения в обратном прямого направления 9 движения.
Поскольку нормализованная переменная по размаху была определена так, чтобы все узлы на заранее заданной границе 24 основания поверхностной сетки 14 аэродинамического профиля имели величину 0, критерием для определения того, лежит ли узел n2 на заранее заданной границе 24 основания, является нормализованная переменная размаха, равная 0.
Как только алгоритм движения в обратном направлении прямого направления движения вперед завершен, идентифицируется базовая линия 16 или фронт Парето, соответствующий переднему краю 20 поверхностной сетки 14 аэродинамического профиля.
На фиг.8 показана базовая линия 18 или фронт Парето, соответствующий заднему краю 22 поверхностной сетки 14 аэродинамического контура, который был идентифицирован при использовании способа, описанного выше, с критерием поиска для координаты Х, определенной как максимум.
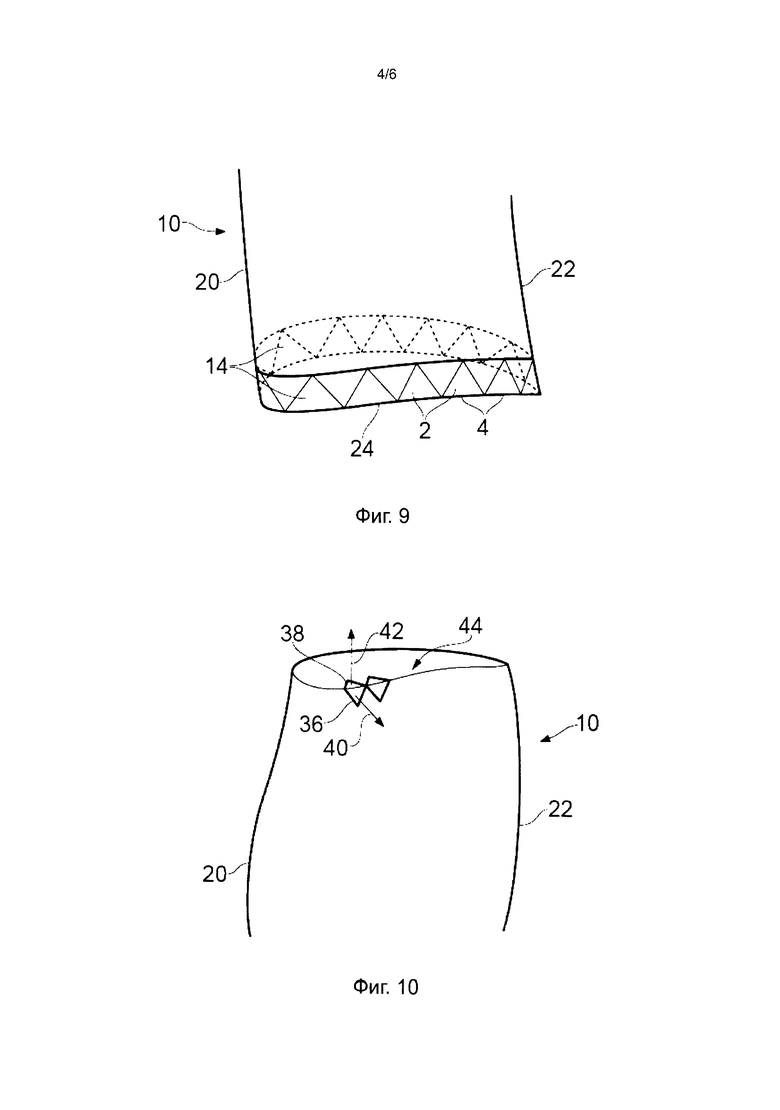
На фиг.9 изображено основание 24 поверхностной сетки 14 аэродинамического профиля. Поверхностная сетка 14 аэродинамического профиля имеет открытый конец основания 24. Заранее заданную границу поверхностной сетки в основании 24 идентифицируют путем поиска всех краев 4 в поверхностной сетке 14, которая соединена только с одной лицевой поверхностью 2. Эти края составляют периферию аэродинамического профиля и могут быть классифицированы как замкнутый контур, которые определяют границу 24.
На фиг.10 изображена вершина 26 поверхностной сетки 14 аэродинамического профиля. Поверхностная сетка 14 включает в себя зону 44, проходящую поверх вершины аэродинамического профиля. С целью идентификации переднего и заднего краев (или других базовых линий) необходимо завершить алгоритм движения вершины, иначе базовая линия будет продолжаться генерироваться по поверхности вершины. Следовательно, заранее заданная граница 26 на вершине аэродинамического профиля идентифицирована путем вычисления скорости изменения нормалей лицевых поверхностей между смежными лицевыми поверхностями в сетке. Два примера лицевых поверхностей 36 и 38 показаны с направлениями 40 и 42, нормальными к лицевой поверхности. Резкое изменение в направлении нормалей лицевой поверхности между соседними лицевыми поверхностями используют для определения границы 26 на вершине поверхностной сетки аэродинамического профиля.
На фиг.11 изображена поверхностная сетка 14 аэродинамического профиля с базовыми линиями 16, 18, идентифицированными на переднем крае 20 и заднем крае 22. Эти базовые линии 16, 18 и заранее заданные границы на основании 24 и вершине 26 делят поверхностную сетку 14 аэродинамического профиля на две поверхности 30, 32.
Узлы, принадлежащие этим двум поверхностям 30, 32, соответственно, могут быть идентифицированы путем посева исходного узла, который не лежит на базовых линиях или предопределенных границах. Этот посев распространяется к узлам, которые соединены с исходным узлом и не лежат на базовых линиях 16, 18 или предопределенных границах 24, 26. Распространение продолжается для всех вновь посеянных узлов до тех пор, пока посев не может распространяться как-либо дальше.
Все отобранные узлы лежат на первой стороне аэродинамической поверхности 30. Все неотобранные узлы не лежат на базовых линиях 16, 18, или заранее заданные границы 24, 26 лежат на второй стороне аэродинамической поверхности 32.
Области лицевых поверхностей, связанных с узлами на каждой стороне аэродинамического профиля, суммируют для вычисления площадей каждой стороны аэродинамического профиля, соответственно. В этом примере, сторона 30 с большей площадью идентифицируется как сторона 32 низкого давления, а другая сторона идентифицируется как сторона высокого давления.
Хордовую переменную определяют на всех узлах на поверхностной сетке 14 фиг.8. Хордовая переменная изменяется в направлении хорды от базовой линии 16, соответствующей переднему краю 20, ко второй базовой линии 18, соответствующей заднему краю 22 поверхностной сетки 14 аэродинамического профиля. Хордовую переменную нормализуют до 0 на всех узлах на первой базовой линии 16 и до 1 на всех узлах на второй базовой линии 18. Величина нормализованной хордовой переменной на каждом узле дает дробное значение расстояния каждого узла между передним краем 20 и задним краем 22 аэродинамического профиля 10.
На фиг.12 изображена часть 28 на поверхностной сетке 14 аэродинамического профиля для использования в моделировании. Критерий для части 28 выражен на основе диапазонов в направлении хорды и в направлении размаха, так что он содержит участок, а не просто линию, на поверхностной сетке аэродинамического профиля. Критерием для части 28 на фиг.12 является диапазон в направлении хорды, составляющий 10-50% хорды и диапазон в направлении размаха, составляющий 10-90% размаха. Поскольку передний и задний края 16, 18 и заранее заданные границы 24, 26 были идентифицированы, как описано выше, моделирование способно интерпретировать критерий для части 28 на основе диапазонов в направлении хорды и в направлении размаха зоны 28 поверхностной сетки 14, соответственно.
Практическая демонстрация использования части 28 в моделировании показана на фиг.13. В этом примере часть 28 является зоной на поверхностной сетке аэродинамического профиля, по которой моделирование вычислительной гидродинамики использует модель перехода. На фиг.13 показана зона 28 на стороне 30 низкого давления поверхностной сетки 14 аэродинамического профиля, занимающая площадь, простирающуюся между 10-50% хорды и 10-90% размаха. Модель перехода используется для предсказания того, когда поток, проходящий по аэродинамическому профилю, изменится от ламинарного потока до турбулентного потока. Модель перехода использует эмпирическую информацию и информацию, взятую из моделирования вычислительной гидродинамики в определенной зоне 28, для предсказания того, где переход имеет место в этой зоне 28, и, соответственно, регулирует параметры моделирования вычислительной гидродинамики. Поскольку сторона 32 повышенного давления 32 и сторона 30 низкого давления аэродинамического профиля 10 были определены, модель перехода может использовать эту информацию для вычисления точки перехода на основе конкретной эмпирической информации для стороны повышенного давления или стороны низкого давления аэродинамического профиля, соответственно. Например, на фиг.13 показана линия 34 (приблизительно при 35% хорды), на которой предсказано наличие перехода. Модель перехода может быть использована для регулирования скорости генерирования турбулентности в положениях на сетке, соответствующих этому местоположению.
Хотя способ, соответствующий настоящему изобретению, был описан со ссылкой на поверхностную сетку 14 на аэродинамическом профиле 10, аэродинамический профиль 10 является только примером компонента, а способы, соответствующие настоящему изобретению, применимы также к компонентам других конфигураций.
Способы, соответствующие настоящему изобретению, применимы также к другим типам моделирования, иным, чем вычислительная гидродинамика, например к анализу конечного элемента (FIA).
Хотя процесс, описанный со ссылкой на фиг.13, относится к модели перехода для предсказания точки перехода между ламинарным и турбулентным потоком в модулировании вычислительной гидродинамики, способы, соответствующие настоящему изобретению, применимы также к любому моделированию, которое использует модель, требующую нелокальной информации, относящейся к геометрии компонента, например, положения оконечностей компонента или положения элементов сетки (ячеек, лицевых поверхностей, краев, узлов) относительно базовых линий в таких оконечностях.
Настоящее изобретение обеспечивает способ идентификации базовой линии, который может быть реализован посредством компьютера либо в рамках моделирования вычислительной гидродинамики, либо отдельно. Кроме того, настоящее изобретение позволяет определить участок относительно базовых линий, основываясь на критериях в направлении размаха профиля и в направлении хорды, причем эти критерии могут быть выбраны специалистом-оператором или определены с помощью автоматизированного процесса, например, изучения или оптимизации способности к быстрому реагированию. В соответствии с этим настоящее изобретение дает возможность вмешательства специалиста-оператора в определении базовой линии (базовых линий) и участка, подлежащего уменьшению или полному исключению, так что моделирования вычислительной гидродинамики, требующие определения базовых линий и/или участка, могут осуществляться автоматически и с более высокой скоростью. Кроме того, базовые линии идентифицируются в процессе, который отличается от процесса, который проводил бы специалист-оператор, и, таким образом, не обязательно дает подобный результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОПАСТЬ ВИНТА И АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ ЛОПАСТИ (ВАРИАНТЫ) | 1996 |
|
RU2145293C1 |
| Раздвоенный сопряженный винглет | 2015 |
|
RU2698502C2 |
| ПРОЦЕСС АДАПТИВНОЙ ОБРАБОТКИ ЛИТЫХ ЛОПАТОК | 2012 |
|
RU2607867C2 |
| ПРИСПОСОБЛЕНИЕ В СБОРЕ ДЛЯ ПОВЫШЕНИЯ ПОДЪЕМНОЙ СИЛЫ ЛЕТАТЕЛЬНОГО АППАРАТА С НЕИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ КРЫЛЬЕВ | 2020 |
|
RU2792827C1 |
| ПЕРФОРИРОВАННАЯ КОНСТРУКЦИЯ ОБШИВКИ ДЛЯ СИСТЕМ С ЛАМИНАРНЫМ ОБТЕКАНИЕМ | 2003 |
|
RU2324625C2 |
| УНИВЕРСАЛЬНЫЙ ПОЛИПЛАН | 1992 |
|
RU2025295C1 |
| РАЗБОРНАЯ УПРУГОПОДОБНАЯ АЭРОДИНАМИЧЕСКАЯ МОДЕЛЬ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2012 |
|
RU2500995C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799100C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799101C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799102C1 |
Изобретение относится к технологиям автоматической идентификации базовой линии на изображении поверхностной сетке аэродинамического профиля для использования в моделировании. Техническим результатом является автоматизированное определение базовой линии аэродинамического профиля. Предложен компьютерно-реализованный способ определения базовой линии на поверхностной сетке аэродинамического профиля для использования в моделировании, причем поверхностная сетка содержит узлы, взаимосвязанные краями. Способ содержит этап, на котором осуществляют определение базовой системы координат, включающей в себя направление X относительно аэродинамического профиля. Также, согласно способу, осуществляют определение переменной по протяженности профиля, которая монотонно изменяется вдоль аэродинамического профиля по прямому направлению движения, которое не совпадает с направлением X. Далее выбирают первый фронтальный узел на базовой линии аэродинамического профиля. Используют алгоритм фронта Парето для определения базовой линии на оконечности поверхностной сетки относительно направления X аэродинамического профиля. 5 н. и 20 з.п. ф-лы, 13 ил.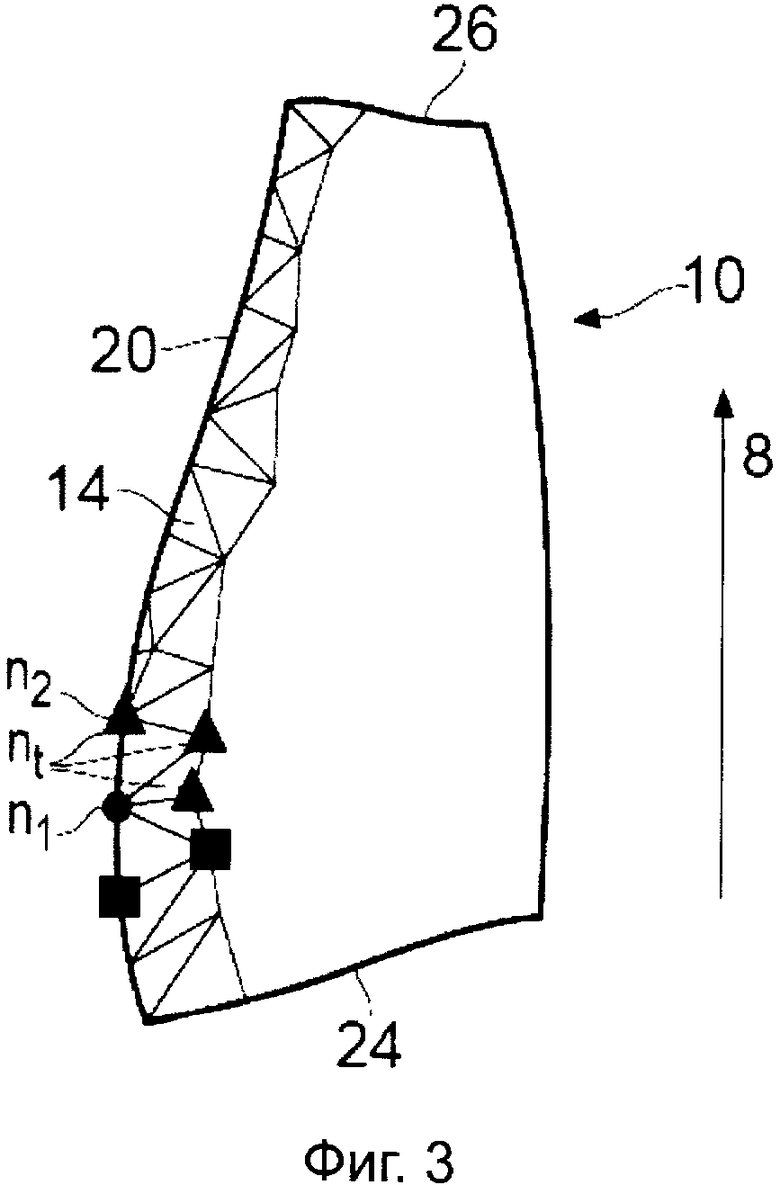
1. Компьютерно-реализованный способ определения базовой линии (16, 18) на поверхностной сетке (12, 14) аэродинамического профиля (10) для использования в моделировании, причем поверхностная сетка (12, 14) содержит узлы (6), взаимосвязанные краями (4), включающий в себя:
a) определение базовой системы координат, включающей в себя направление X относительно аэродинамического профиля (10),
b) определение переменной по протяженности профиля, которая монотонно изменяется вдоль аэродинамического профиля по прямому направлению (8) движения, которое не совпадает с направлением X,
c) выбор первого фронтального узла n1 на базовой линии аэродинамического профиля (10),
d) использование алгоритма фронта Парето для определения базовой линии (16, 18) на оконечности поверхностной сетки относительно направления X аэродинамического профиля (10), причем в алгоритме фронта Парето, который оценивает критерий для подчиненных узлов и оперирует с переменной Парето для выбора последовательных фронтальных узлов, образующих базовую линию (16, 18) аэродинамического профиля (10), где переменной Парето является координата X, а критерием для подчиненных узлов является величина протяженности профиля, которая меньше величины для выбранного фронтального узла n1, и
e) вывод идентифицированной базовой линии (16,18) аэродинамического профиля (10).
2. Компьютерно-реализованный способ по п. 1, в котором направление X является главным образом направлением сверху вниз относительно аэродинамического профиля (10), и переменная протяженности изменяется в направлении протяженности относительно аэродинамического профиля (10).
3. Компьютерно-реализованный способ по п. 1, в котором значения переменной протяженности на каждом узле вычисляют при использовании дискретизированного уравнения Пуассона.
4. Компьютерно-реализованный способ идентификации базовой линии (16, 18) на поверхностной сетке (12, 14) аэродинамического профиля (10) для использования в моделировании, причем поверхностная сетка (12, 14) содержит узлы (6), взаимосвязанные краями, включающий в себя:
а) определение базовой системы координат, включающей в себя направление X относительно аэродинамического профиля (10);
b) определение критерия поиска координаты X как минимального или максимального значения X координаты;
c) определение нормализованной переменной протяженности, которая монотонно изменяется вдоль аэродинамического профиля (10) в другом направлении, чем направление X, и присваивание величин нормализованной переменной протяженности всем узлам на поверхностной сетке аэродинамического профиля (10);
d) определение прямого направления (8) движения относительно аэродинамического профиля (10);
e) определение местонахождения и выбор узла n1 из набора всех узлов N на поверхностной сетке (12, 14), причем узел n1 удовлетворяет критерию поиска для координаты X в наибольшей степени;
f) назначение узла n1 для набора узлов Nd, соответствующего базовой линии (16, 18) аэродинамического профиля (10);
g) идентификацию набора узлов Nt, которые имеют нормализованную переменную протяженности, соответствующую такому же положению по направлению протяженности профиля или положению в направлении по протяженности при движении к узлу n1 относительно прямого направления движения, и соединены с узлом n1 посредством края;
h) выбор узла n2 из набора узлов Nt, причем узел n2 удовлетворяет критерию поиска координаты X в наибольшей степени;
i) добавление узла n2 к набору узлов Nd, соответствующих базовой линии аэродинамического профиля (10);
j) переопределение узла n1 как текущего выбранного узла n2 и повторение этапов (g)-(j) для выбора последовательных узлов n2;
k) определение базовой линии (16, 18), соответствующей набору узлов Nd; и
l) вывод идентифицированной базовой линии (16, 18) аэродинамического профиля (10).
5. Компьютерно-реализованный способ по п. 4, в котором этапы (g)-(j) повторяют до тех пор, пока не будет выбран узел n2, который лежит на заранее заданной границе (24, 26) поверхностной сетки (12, 14) аэродинамического профиля (10),
6. Компьютерно-реализованный способ по п. 4, дополнительно включающий в себя:
а) реверсирование прямого направления движения относительно аэродинамического профиля (10),
b) выбор узла n1 из любого набора узлов Nd, соответствующих базовой линии (16, 18),
c) повторение этапов (g)-(j).
7. Компьютерно-реализованный способ по п. 4, в котором направление X является главным образом направлением сверху вниз относительно аэродинамического профиля (10), и переменная протяженности изменяется в направлении протяженности относительно аэродинамического профиля (10).
8. Компьютерно-реализованный способ по п. 5, дополнительно включающий в себя:
a) реверсирование прямого направления движения относительно аэродинамического профиля (10),
b) выбор узла n1 из любого набора узлов Nd, соответствующих базовой линии (16, 18),
c) повторение этапов (g)-(l).
9. Способ по п. 5, в котором края (4) поверхностной сетки (14) определяют лицевые поверхности (2), и в котором заранее заданная граница (24, 26) поверхностной сетки (12, 14) аэродинамического профиля (10) локализована посредством идентификации краев (4) в поверхностной сетке, которая частично определяет только одну лицевую поверхность (2), соответственно.
10. Способ по п. 6, в котором края (4) поверхностной сетки (14) определяют лицевые поверхности (2), и в котором заранее заданная граница (24, 26) поверхностной сетки (12, 14) аэродинамического профиля (10) локализована посредством идентификации краев (4) в поверхностной сетке, которая частично определяет только одну лицевую поверхность (2), соответственно.
11. Способ по п. 8, в котором края (4) поверхностной сетки (14) определяют лицевые поверхности (2), и в котором заранее заданная граница (24, 26) поверхностной сетки (12, 14) аэродинамического профиля (10) локализована посредством идентификации краев (4) в поверхностной сетке, которая частично определяет только одну лицевую поверхность (2), соответственно.
12. Способ по п. 5, в котором края (4) поверхностной сетки (14) определяют лицевые поверхности (2), и в котором заранее заданная граница (24, 26) поверхностной сетки (12, 14) аэродинамического профиля (10) локализована на основе скорости изменения нормалей (40, 42) лицевой поверхности между смежными лицевыми поверхностями (36, 38).
13. Способ по п. 6, в котором края (4) поверхностной сетки (14) определяют лицевые поверхности (2), и в котором заранее заданная граница (24, 26) поверхностной сетки (12, 14) аэродинамического профиля (10) локализована на основе скорости изменения нормалей (40, 42) лицевой поверхности между смежными лицевыми поверхностями (36, 38).
14. Способ по п. 8, в котором края (4) поверхностной сетки (14) определяют лицевые поверхности (2), и в котором заранее заданная граница (24, 26) поверхностной сетки (12, 14) аэродинамического профиля (10) локализована на основе скорости изменения нормалей (40, 42) лицевой поверхности между смежными лицевыми поверхностями (36, 38).
15. Способ идентификации первой и второй базовых линий (16, 18) на поверхностной сетке (12, 14) аэродинамического профиля (10) для использования в моделировании, причем поверхностная сетка (12, 14) аэродинамического профиля (10) имеет две заранее заданные границы (24, 26), в котором первую и вторую базовые линии (16, 18) аэродинамического профиля (10), идентифицируют независимо способом по любому одному из пп. 2-6 с критерием поиска для координаты X, определенным, соответственно, как минимум и максимум, причем первая и вторая базовые линии (16, 18) пересекают заранее заданные границы (24, 26) и делят поверхностную сетку (12, 14) аэродинамического профиля (10) на первую и вторую части (30, 32).
16. Способ по п. 15, в котором направление X является главным образом направлением сверху вниз относительно аэродинамического профиля (10), и переменная протяженности изменяется в направлении протяженности относительно аэродинамического профиля (10).
17. Способ по п. 16, дополнительно включающий в себя этапы:
a) вычисление площади первой части (30) поверхностной сетки (12, 14);
b) вычисление площади второй части (32) поверхностной сетки (12, 14);
c) определение части поверхностной сетки с большей площадью как стороны низкого давления аэродинамического профиля (10);
d) определение части поверхностной сетки с меньшей площадью как стороны повышенного давления аэродинамического профиля (10).
18. Способ по п. 17, в котором соответствующие площади первой и второй частей (30, 32) вычисляют посредством:
a) выбора узла на поверхностной сетке (12, 14), который не лежит на первой или второй базовой линии (16, 18), и назначение этого узла в набор узлов S1;
b) идентификации узлов, соединенных с узлами в наборе S1, и назначение этих узлов в набор узлов S1, если они не лежат на первой или второй базовой линии (16, 18) или заранее заданной границе (24, 26) поверхностной сетки;
c) повторения этапа b) до тех пор, пока дополнительные узлы не могут быть назначены в набор узлов S1;
d) выделения всех узлов, которые не назначены в набор узлов S1, в набор узлов S2, если они не лежат на первой и второй базовой линии или на заранее заданной границе (24, 26) поверхностной сетки (12, 14);
e) суммирования площадей лицевых поверхностей (2) сетки (12, 14), определенных узлами, принадлежащими к наборам S1 и S2, соответственно.
19. Способ определения участка (28) на поверхностной сетке (12, 14) аэродинамического профиля (10) для использования в моделировании, в котором хордовую переменную определяют для изменения между первой и второй базовыми линиями (16, 18) аэродинамического профиля (10), первую и вторую базовые линии (16, 18) аэродинамического профиля (10), идентифицируют способом по п. 12, в котором критерий для каждого участка (28) выражен на основе диапазонов в направлении хорды и/или в направлении протяженности аэродинамического профиля (10).
20. Способ по п. 19, в котором значения хордовой переменной вычисляют в каждом узле при использовании дискретизированного уравнения Пуассона.
21. Способ по п. 19, в котором направление X является главным образом направлением сверху вниз относительно аэродинамического профиля (10), и переменная протяженности изменяется в направлении протяженности относительно аэродинамического профиля (10).
22. Способ применения модели перехода для моделирования вычислительной гидродинамики, причем модель перехода требует выбора участка (28) поверхностной сетки (12, 14) аэродинамического профиля, участок (28) поверхностной сетки (12, 14) аэродинамического профиля выбирают способом по п. 19.
23. Способ по п. 22, дополнительно включающий в себя этапы:
a) вычисление площади первой части (30) поверхностной сетки (12, 14);
b) вычисление площади второй части (32) поверхностной сетки (12, 14);
c) определение части поверхностной сетки с большей площадью как стороны низкого давления аэродинамического профиля (10);
d) определение части поверхностной сетки с меньшей площадью как стороны повышенного давления аэродинамического профиля (10).
24. Способ по п. 23, в котором соответствующие площади первой и второй частей (30, 32) вычисляют посредством:
a) выбора узла на поверхностной сетке (12, 14), который не лежит на первой или второй базовой линии (16, 18), и назначение этого узла в набор узлов S1;
b) идентификации узлов, соединенных с узлами в наборе S1 и назначение этих узлов в набор узлов S1, если они не лежат на первой или второй базовой линии (16, 18) или заранее заданной границе (24, 26) поверхностной сетки;
c) повторения этапа b) до тех пор, пока дополнительные узлы не могут быть назначены в набор узлов S1;
d) выделения всех узлов, которые не назначены в набор узлов S1, в набор узлов S2, если они не лежат на первой и второй базовой линии или на заранее заданной границе (24, 26) поверхностной сетки (12, 14);
e) суммирования площадей лицевых поверхностей (2) сетки (12, 14), определенных узлами, принадлежащими к наборам S1 и S2, соответственно.
25. Способ по п. 23, в котором модель перехода ведет себя иначе в зависимости от того, находится ли участок (28) поверхностной сетки (12, 14) аэродинамического профиля на стороне (32) повышенного давления или на стороне (30) низкого давления аэродинамического профиля (10).
| статья Clemen C | |||
| "Aero-mechanical optimisation of a structural fan iutlet guide vane", опубл | |||
| Насос | 1917 |
|
SU13A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| статья Shahpar S | |||
| "Parametric design and rapid meshing system for turbomachinery optimisation", опубл | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 5729670 A, 17.03.1998 | |||
| US 6608627 B1, 19.08.2003 | |||
| Инженерно-технический журнал "Solutions от идей к решениям", N1, опубл | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

