Область техники
Изобретение в целом относится к скважинному оборудованию для бурения скважины в толще земных пород. В частности, изобретение относится к способу уменьшения осцилляций прерывистого скольжения в таком скважинном оборудовании, а также к устройству и электронному контроллеру для выполнения этого способа при бурении скважины, а также к скважинному оборудованию, оборудованному и работающему в соответствии с этим способом, устройством или электронным контроллером.
Уровень техники
Термин «буровая скважина» обычно обозначает результат операции бурения в породе, проводимой или вертикально, горизонтально и/или с отклонением при использовании буровой колонны, содержащей буровое долото на своем нижнем конце. На ее верхнем конце буровую колонну приводит в действие размещенная на поверхности система привода, называемая верхним приводом или столом ротора. Приведение в действие верхнего привода или стола ротора осуществляется посредством электродвигателя или посредством приводного двигателя любого другого типа, создающего поворотное перемещение для бурового долота в буровой скважине.
Как правило, буровая колонна представляет собой очень тонкую структуру из множества трубчатых элементов или труб, посредством резьбы соединенных друг с другом, и может иметь длину несколько сотен или тысяч метров.
Нижнюю часть буровой колонны называют оборудованием низа бурильной колонны, причем оно содержит более тяжелые толстостенные трубы, называемые утяжеленными бурильными трубами, на которые опирается буровое долото.
Буровая колонна выполнена полой, так что промывочная жидкость может быть прокачана вниз к оборудованию низа бурильной колонны и через сопла долота для целей смазки. Промывочная жидкость циркулирует назад вверх через кольцевое пространство, то есть пространство между внешней окружностью буровой колонны и стенкой ствола буровой скважины, для переноса на поверхность шлама, создаваемого долотом.
Буровая скважина может быть выполнена для многих различных целей, включая извлечение воды или другой жидкости (такой как нефть) или газов (такой как природный газ), как часть геотехнического исследования, экологической оценки участка, поисково-разведочных работ на полезные ископаемые, для измерения температуры или в качестве направляющей скважины для установки, например, свай или подземных коммуникаций.
Оборудование низа бурильной колонны выполнено жестким в направлении кручения, поскольку оно выполнено сравнительно коротким и толстостенным и при использовании испытывает боковые прогибы вследствие воздействия сжимающего усилия. Буровая колонна представляет собой крайне гибкую структуру вследствие своей большой длины и относительной малой толщины стенок, так что во время бурения многочисленные вибрации возникают в скважинном оборудовании и, в частности, в буровой колонне. В случае буровой колонны и оборудования низа бурильной колонны, предназначенных для поворотного бурения, могут возникать крутящие, осевые и продольные или поперечные вибрации.
Осевые вибрации могут вызывать подскакивание долота, что может повредить шарошки и подшипники долота. Поперечные вибрации весьма деструктивны и способны создавать большие ударные воздействия при ударе оборудования низа бурильной колонны о стенку буровой скважины. Поперечные вибрации способны ввести систему в обратный вихрь, создавая высокочастотные флуктуации изгибающего момента большой величины, что приводит к высоким скоростям компонентов и усталости соединений. Разбалансировка при сборке может приводить к вызванному центробежными силами изгибу буровой колонны, что может образовывать прямой вихрь и приводить к одностороннему износу компонентов. Крутильные вибрации приводят, среди всего прочего, других, к перемещениям или осцилляциям буровой колонны с явлением прерывистого скольжения вдоль буровой скважины.
Прерывистое скольжение представляет собой явление, вызванное силами трения между поверхностями бурового долота и/или буровой колонны, входящими в контакт с породами или внутренней стенкой буровой скважины. Поверхности попеременно могут прилипать друг к другу или скользить друг по другу при соответствующем изменении силы трения. В крайних случаях трение может стать настолько большим, что буровое долото, то есть оборудование низа бурильной колонны, временно переходит в состояние полной неподвижности, называемое режимом прилипания. Во время режима прилипания скорость продолжающегося поворотного привода или перемещение системы привода скручивают буровую колонну. Если крутящий момент, возникающий в буровой колонне, достаточно велик для преодоления трения, оборудование низа бурильной колонны снова начинает поворот, называемый режимом скольжения. Это, однако, может вызвать внезапный скачок или ступенчатое увеличение углового ускорения перемещения бурового долота и может приводить к его чрезмерному износу. Режимы прилипания и скольжения могут достаточно быстро следовать за друг другом способом, напоминающим осцилляции.
Явление прерывистого скольжения также представляет собой основной источник проблем, вызывающих поломки оборудования, когда буровая колонна, вследствие вызванных в ней поворотных осцилляций начинает создавать отрицательный крутящий момент, то есть крутящий момент в направлении, противоположном направлению поворота системы привода. При превышении отрицательным крутящим моментом порога трения может иметь место развинчивание труб.
При возникновении явления прерывистого скольжения происходит воздействие на эффективность процесса бурения, так что запланированные буровые работы могут быть отложены на несколько дней с риском выплаты штрафов и т.п.
В соответствии с этим в различных ситуациях необходимо управлять влиянием осцилляций прерывистого скольжения на скважинное оборудование, в максимально возможной степени уменьшая посредством этого вышеупомянутые проблемы.
Уменьшение явления прерывистого скольжения было целью многих исследований и патентных публикаций. Заявка на международный патент WO 2010/063982, например, предлагает амортизацию осцилляций прерывистого скольжения, основанную на частоте или на распространении волн по линии передачи, посредством управления контроллером скорости, имеющим свой частотно-зависимый коэффициент отражения набора крутильных волн, установленный на минимум или вблизи скорости осцилляций прерывистого скольжения.
Затруднение при использовании этого известного подхода состоит в том, что в режиме прилипания, при котором оборудование низа бурильной колонны пребывает в полной неподвижности, частотный подход не в состоянии правильно описать физическое поведение скважинного оборудования, поскольку скорость оборудования низа бурильной колонны, очевидно, равна нулю. Далее, на практике оборудование низа бурильной колонны выполняет поворот при относительных низких скоростях, что делает более затруднительным достаточно точное выполнение подхода, основанного на синусоидальном сигнале, и потому реальная система бурения проявляет нелинейное поведение.
Раскрытие изобретения
Задача изобретения состоит в разработке способа уменьшения осцилляций прерывистого скольжения в скважинном оборудовании для бурения буровой скважины в толще земных пород.
Другая задача изобретения состоит в разработке устройства для уменьшения осцилляций прерывистого скольжения в скважинном оборудовании для бурения буровой скважины в толще земных пород.
Еще одна задача изобретения состоит в разработке электронного контроллера для управления скоростью поворота системы поворотного привода с целью уменьшения осцилляций прерывистого скольжения в скважинном оборудовании для бурения буровой скважины в толще земных пород.
Еще одна задача изобретения состоит в разработке скважинного оборудования для бурения буровой скважины в толще земных пород в соответствии со способом и/или оборудованного указанным устройством или электронным контроллером.
В настоящем описании изобретения и в пунктах формулы изобретения термин «уменьшение» при его использовании в отношении осцилляций прерывистого скольжения должен быть рассмотрен, как включающий значения управления, облегчения, сокращения, смягчения, освобождение и аналогичные значения, вплоть до и включая устранение осцилляций прерывистого скольжения.
В качестве первой особенности изобретения предложен способ уменьшения осцилляций прерывистого скольжения в скважинном оборудовании для бурения буровой скважины в толще земных пород. Скважинное оборудование содержит буровую колонну, содержащую оборудование низа бурильной колонны и верхний конец, присоединенный к системе поворотного привода, и контроллер скорости для управления скоростью поворотного привода системы привода.
Этот способ включает следующие операции:
- управления контроллером скорости таким образом, чтобы скорость привода превышала нижнее предельное значение скорости привода при бурении буровой скважины скважинным оборудованием, причем нижнее предельное значение скорости привода определено на основании:
- моделирования скважинного оборудования посредством эквивалентной расчетной модели для компьютерного моделирования,
- загрузки элементов модели физическими величинами, представляющими начальное состояние скважинного оборудования, вызывающими переход оборудования низа бурильной колонны из режима прилипания в режим скольжения,
- имитационного моделирования (stimulating) в загруженной модели перехода, отражающего переход оборудования низа бурильной колонны из режима прилипания в режим скольжения,
- получения значений релаксационных динамических характеристик в модели на основании указанной операции моделирования, отражающих скорость поворотного перемещения под действием привода для оборудования низа бурильной колонны, и
- определения на основании релаксационных динамических характеристик нижнего предельного значения скорости привода как скорости привода, при которой скорость поворота под действием привода для оборудования низа бурильной колонны равна нулю.
Этот способ основан на идее, что осцилляции прерывистого скольжения в скважинном оборудовании должны быть проанализированы во временной области, а не в частотной области, чтобы учесть ступенчатые переходы от режима прилипания к режиму скольжения.
Посредством приложения физических величин к элементам компьютерной модели, отражающим реальное скважинное оборудование, таким образом, чтобы они соответствовали начальному состоянию скважинного оборудования до перехода из режима прилипания в режим скольжения, переходные эффекты в скважинном оборудовании могут быть смоделированы, оценены и визуализированы.
При использовании реакции на ступенчатое воздействие от таким образом загруженной модели скважинного оборудования, моделирующей событие высвобождения оборудования низа бурильной колонны, то есть внезапный переход из режима прилипания в режим скольжения, было замечено, что система обычно показывает поведение во времени или релаксационные динамические характеристики динамической системы. Таким образом, имеет место переходная фаза, в которой скорость поворота оборудования низа бурильной колонны проявляет повышенное значение с последующим недостаточным значением относительно стационарного режима. Явление прерывистого скольжения происходит, если скорость поворота оборудования низа бурильной колонны вследствие ее недостаточного значения равна нулю или близка к нулю. Именно это повторяющееся обращение в ноль или почти обращение в ноль величины скорости поворота оборудования низа бурильной колонны вызывает осцилляции прерывистого скольжения в скважинном оборудовании.
Посредством оценки релаксационных динамических характеристик в загруженной системе при использовании реакции на ступенчатое воздействие определена минимальная скорость поворота или критическая скорость системы привода, при которой скорость поворота оборудования низа бурильной колонны равна нулю. Скорость поворота системы привода установлена такой, чтобы быть выше нижнего предельного значения или критической скорости, так чтобы скорость поворота оборудования низа бурильной колонны оставалась выше нуля.
В соответствии со способом по изобретению параметры контроллера скорости оценены и выбраны оптимальным способом, причем динамическое поведение всех систем будет наиболее надежным, уменьшая посредством этого осцилляции прерывистого скольжения при бурении буровой скважины скважинным оборудованием.
В одном варианте реализации изобретения контроллером скорости управляют таким образом, чтобы скорость привода во время стационарной работы системы привода была по возможности низкой, но выше критической скорости. Это обеспечивает возможность оператору бурить с низкой скоростью, сохраняя относительно высокую загрузку на долото, уменьшая в максимально возможной степени явление прерывистого скольжения и подавляя вихри, поскольку последние вряд ли возникают при относительно низкой скорости поворота оборудования низа бурильной колонны.
В самом простом варианте реализации изобретения моделирование выполнено таким образом, что физические величины, отражающие начальное состояние скважинного оборудования, отражают предварительно закрученную буровую колонну в результате режима прилипания оборудования низа бурильной колонны.
Было замечено, что выполнение моделирования механических свойств двигателя привода, буровой колонны и оборудования низа бурильной колонны, а также свойств контроллера скорости, может приводить к такому определению критической скорости привода, которое достаточно точно для многих операций бурения, еще более точное определение нижнего предельного значения скорости поворота системы привода получено при включении в моделирование описания фактической земной породы, в которой выполнена буровая скважина, а также промывочной жидкости или раствора, используемых для целей бурения.
Таким образом, принимая во внимание влияние реальной земной породы и промывочной жидкости или раствора при моделировании реальной подлежащей бурению буровой скважины, поведение во времени скважинного оборудования может быть еще более точно смоделировано, что приводит к еще более точному определению критической скорости и временной характеристики системы в целом.
В первом приближении может быть использована линейная модель компьютерного моделирования буровой колонны. Было обнаружено, что такая линейная модель дает практические результаты с преимуществом менее строгих требований к вычислительной мощности компьютера и к объему используемой памяти. В большинстве случаев достаточна линейная модель буровой колонны второго порядка.
Для целей изобретения модель для имитационного моделирования может быть выбрана из набора известных расчетных моделей, предназначенных для компьютерного моделирования динамических систем, с целью как можно более точного моделирования динамических характеристик скважинного оборудования.
В одном варианте реализации изобретения электрическая эквивалентная схема использована в качестве модели компьютерного моделирования. Однако аналогичным образом может быть использована эквивалентная нелинейная механическая модель или модель в пространстве состояний или модель динамического моделирования.
Операция определения нижнего предельного значения скорости привода как такой скорости привода, при которой скорость поворотного перемещения под действием привода для оборудования низа бурильной колонны равна нулю, может включать дополнительную оптимизацию посредством итерационного повторения операций загрузки, моделирования и оценивания при использовании адаптированных значений физических величин и параметров модели.
Следует иметь в виду, что при каждом удлинении буровой колонны дополнительной трубной секцией или секциями будет иметь место изменение динамических характеристик скважинного оборудования и, в особенности, буровой колонны. В соответствии с этим для обновления данных о прерывистом скольжении операции моделирования режима прилипания, режима скольжения и определения нижнего предельного значения скорости поворота системы привода в идеале должны быть повторены каждый раз после модификации части скважинного оборудования. Совершенно ясно, что контроллером скорости следует управлять в соответствии с таким образом определенным значением нижнего предельного значения скорости поворота системы привода.
Специалистам в данной области техники ясно, что внесение других модификаций в скважинное оборудование и/или бурение новых типов земных пород или отклонение траектории буровой колонны во время бурения могут также приводить к необходимости повторного установления обновленного значения нижнего предельного значения скорости поворотного привода. Конечно, все это зависит от используемой модели имитационного моделирования.
В одном варианте реализации изобретения, когда контроллер скорости представляет собой контроллер пропорционально-интегрального типа, выполняющий пропорциональное P регулирование и интегральное I регулирование, эти виды (P и I) регулирования установлены такими, чтобы уменьшать нижнее предельное значение скорости привода при использовании реакции на ступенчатое воздействие. Контроллером скорости управляют, используя установленное интегральное регулирование при бурении буровой скважины посредством скважинного оборудования.
Было замечено, что изобретение обеспечивает возможность работы системы привода при еще более низкой критической скорости при компенсации механической инерции, скомбинированной с уменьшенным интегральным регулированием, что эффективно уменьшает возникновение прерывистого скольжения. В соответствии с этим при таком подходе увеличен диапазон рабочих поворотных скоростей скважинного оборудования.
Еще в одном варианте реализации изобретения контроллер скорости выполняет дополнительное интегральное регулирование. Это дополнительное интегральное регулирование установлено таким, чтобы ускорять успокоение скорости перемещения под действием привода для оборудования низа бурильной колонны при использовании реакции на ступенчатое воздействие, причем контроллером скорости управляют, применяя интегральное регулирование при бурении буровой скважины посредством скважинного оборудования.
Это дополнительное интегральное регулирование помогает ускорить двигатель привода в случае продолжительного прилипания, при котором буровая колонна будет выполнять более быстрое закручивание для реализации события высвобождения оборудования низа бурильной колонны из режима прилипания за меньший промежуток времени.
В одном варианте реализации изобретения это дополнительное интегральное регулирование установлено пропорциональным пружинной постоянной или коэффициенту жесткости буровой колонны, смоделированной в виде работающей на кручение пружины.
В другом варианте реализации изобретения имеет место компенсация инерции системы привода. Компенсация инерции управляет ускорением для скорости поворота системы привода при бурении буровой скважины посредством скважинного оборудования. Эта компенсация инерции помогает ускорить буровую колонну непосредственно после события высвобождения.
Вышеупомянутые операции моделирования, загрузки, имитационного моделирования (stimulating), оценки величин и определения могут быть выполнены в системе для компьютерного моделирования, выполненной отдельно и/или дистанционно от скважинного оборудования, например в компьютерной системе, подсоединенной в режиме «онлайн» к контроллеру скорости.
Значения параметров для этих нескольких элементов, составляющих модель имитационного моделирования, могут быть получены заранее и с помощью электронных средств занесены в таблицу или что-то подобное и/или вычислены посредством приближенных моделей для скважинного оборудования, известных специалистам в данной области техники.
В качестве еще одной особенности изобретения предложено устройство для уменьшения осцилляций прерывистого скольжения в скважинном оборудовании для бурения буровой скважины в толще земных пород. Скважинное оборудование содержит буровую колонну, содержащую оборудование низа бурильной колонны и верхний конец, присоединенный к системе поворотного привода, и контроллер скорости для управления скоростью поворотного привода системы привода. Контроллер скорости предназначен для управления системой привода таким образом, чтобы скорость привода превышала нижнее предельное значение скорости привода при бурении буровой скважины посредством скважинного оборудования.
Устройство дополнительно содержит систему для компьютерного моделирования, выполненную для:
- моделирования скважинного оборудования посредством эквивалентной расчетной модели для компьютерного моделирования,
- загрузки элементов модели физическими величинами, представляющими начальное состояние скважинного оборудования, вызывающими переход оборудования низа бурильной колонны из режима прилипания в режим скольжения,
- имитационного моделирования в загруженной модели перехода, отражающего переход оборудования низа бурильной колонны из режима прилипания в режим скольжения,
- получения значений релаксационных динамических характеристик в модели на основании реакции на ступенчатое воздействие и представления скорости поворота под действием привода для оборудования низа бурильной колонны, и
- определения на основании релаксационных динамических характеристик нижнего предельного значения скорости привода как скорости привода, при которой скорость поворотного перемещения под действием привода для оборудования низа бурильной колонны равна нулю.
Система для компьютерного моделирования выполнена с возможностью использования изложенного выше способа по изобретению и может быть размещена физически отдельно от скважинного оборудования, то есть контроллера скорости, например, в виде дистанционной компьютерной системы моделирования. Эта дистанционная компьютерная система может быть в режиме он-лайн присоединена к контроллеру скорости для управления скоростью таким образом, чтобы поддерживать скорость поворота системы привода выше определенного нижнего предельного значения.
Система для компьютерного моделирования может быть присоединена к электронной библиотеке, содержащей механические, электрические и другие системные данные для реального скважинного оборудования, земных пород, промывочных жидкостей и т.п., для определения нижнего предельного значения скорости поворота системы привода. Интерфейс управления может быть предназначен для ввода и вывода данных моделирования для определения нижнего предельного значения скорости поворота оператором бурения, например.
В одном варианте реализации изобретения контроллер скорости представляет собой контроллер пропорционально-интегрального типа, выполняющий пропорциональное P регулирование и интегральное I регулирование, и контроллер выполняет дополнительное интегральное регулирование для управления системой привода для ускорения успокоения скорости перемещения под действием привода для оборудования низа бурильной колонны при бурении буровой скважины посредством скважинного оборудования, в частности при входе в режим прилипания из режима скольжения.
В другом варианте реализации изобретения контроллер скорости содержит компенсатор инерции, выполненный с возможностью воздействия на ускорение скорости поворота системы привода для компенсации инерции системы привода при бурении буровой скважины посредством скважинного оборудования, в частности при входе в режим прилипания из режима скольжения.
Компенсатор инерции предусматривает компенсацию массы системы привода такую, что буровая колонна убыстряется быстрее непосредственно после события высвобождения.
В одном варианте реализации настоящего изобретения контроллер скорости представляет собой электронный контроллер, выполненный как интегральный контроллер пропорционально-интегрального типа.
В качестве еще одной особенности изобретения предложен электронный контроллер для управления поворотной скоростью привода поворотной системы привода в скважинном оборудовании для бурения буровой скважины в земной породе, причем скважинное оборудование содержит буровую колонну, содержащую оборудование низа бурильной колонны и верхний конец, соединенный с системой поворотного привода, причем электронный контроллер содержит устройство ограничения скорости привода с запоминающим устройством, предназначенным для хранения значения нижнего предельного значения скорости привода для скорости привода, полученной посредством способа в соответствии с изобретением. Устройство ограничения скорости установлено для ограничения скорости поворота системы привода, при котором она равна определенной критической скорости или превышает ее.
В одном варианте реализации изобретения электронный контроллер представляет собой контроллер пропорционально-интегрального типа, выполняющий пропорциональное P регулирование и интегральное I регулирование при работе системы привода, и содержащий блок управления, выполняющий дополнительное интегральное регулирование для работы системы привода с целью ускорения успокоения значения скорости поворота или скорости перемещения под действием привода для оборудования низа бурильной колонны, и/или компенсатор инерции для ускорения скорости привода в системе привода для компенсации инерции системы привода при бурении буровой скважины посредством скважинного оборудования, в частности при входе в режим прилипания из режима скольжения. Электронный контроллер как целое может быть обозначен как интегральный контроллер пропорционально-интегрального типа.
Изобретение также предлагает скважинное оборудование для бурения буровой скважины в толще земных пород, причем это скважинное оборудование содержит буровую колонну, имеющую нижний конец, ведущий оборудование низа бурильной колонны, и верхний конец, соединенный с системой поворотного привода, и устройство для уменьшения осцилляций прерывистого скольжения в скважинном оборудовании посредством управления скоростью поворота системы привода, как описано в настоящей заявке.
Скважинное оборудование может быть любым новым оборудованием или скважинным оборудованием, модернизированным в соответствии с любым способом, устройством и электронным контроллером для уменьшения осцилляций прерывистого скольжения в соответствии с изобретением.
Вышеупомянутые и другие особенности и отличительные признаки изобретения будут лучше всего поняты по прочтении последующего подробного описания изобретения со ссылками на прилагаемые чертежи. На этих чертежах позиционные обозначения обозначают идентичные части или части, выполняющие идентичную или сопоставимую функцию или операцию.
Хотя представленные примеры относятся к конкретной модели компьютерного моделирования, использующей программу MATLAB™ в качестве программы компьютерного моделирования, способ, устройство, электронный контроллер и скважинное оборудование, описанные в итоговой части настоящей заявки, не должны быть рассмотрены, как ограниченные этим типом модели и программы компьютерного моделирования. Наоборот, изобретение может быть использовано с любой коммерчески доступной программой компьютерного моделирования для моделирования временного поведения динамической системы, например программой CASPOC™.
Краткое описание чертежей
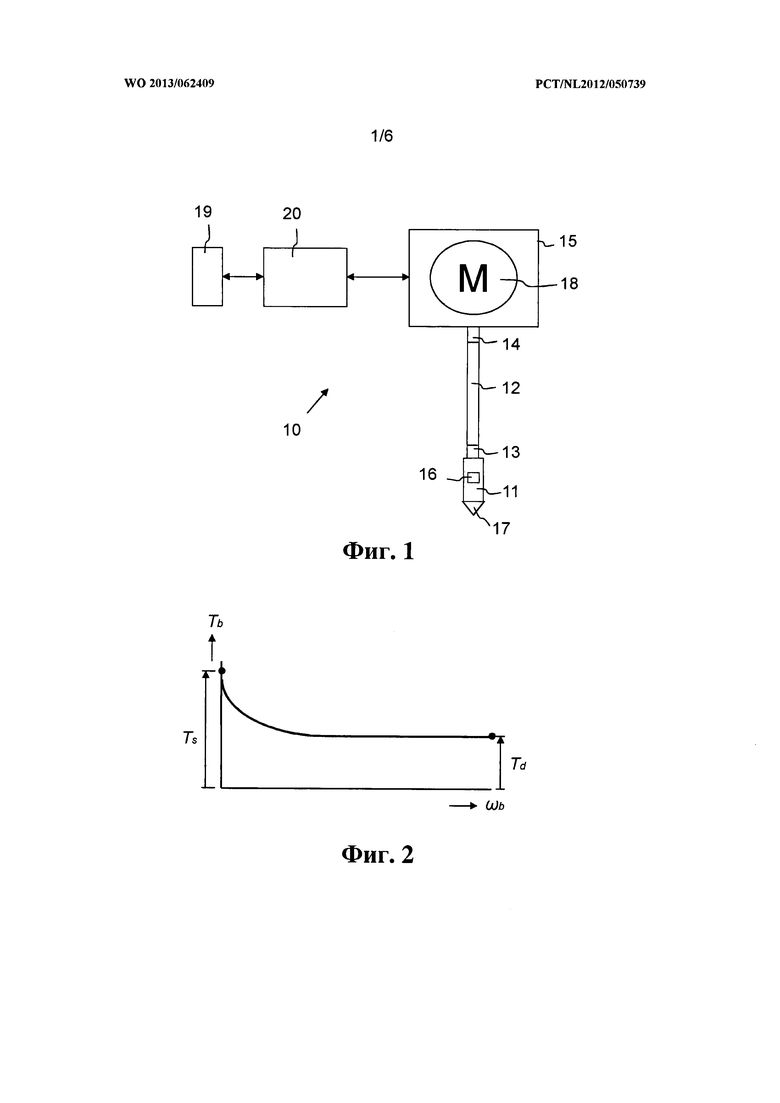
На фиг. 1 показано весьма схематическое представление скважинного оборудования известного уровня техники для бурения буровой скважины в толще земных пород.
На фиг. 2 показана обычная кривая зависимости скорости поворота от крутящего момента при прерывистом скольжении на оборудовании низа бурильной колонны скважинного оборудования.
На фиг. 3 схематически показана электрическая эквивалентная схема, образующая вычислительную модель для компьютерного моделирования условия прерывистого скольжения скважинного оборудования по фиг. 1 в соответствии с изобретением.
На фиг. 4 показано смоделированное поведение во времени для скорости поворота системы привода и оборудования низа бурильной колонны, полученное для модели по фиг. 3 при переходе от режима прилипания в режим скольжения при настроенных установленных значениях системы.
На фиг. 5 показано смоделированное поведение во времени для скорости поворота системы привода и оборудования низа бурильной колонны, полученное для модели по фиг. 3 при переходе от режима прилипания в режим скольжения при установленных значениях системы в соответствии с изобретением.
На фиг. 6 показана упрощенная блок-схема для определения критической скорости в соответствии с изобретением.
На фиг. 7 показано смоделированное поведение во времени для скорости поворота системы привода и оборудования низа бурильной колонны, полученное для модели по фиг. 3 при переходе от режима прилипания в режим скольжения, полученное для различных установленных значений системы в соответствии с изобретением.
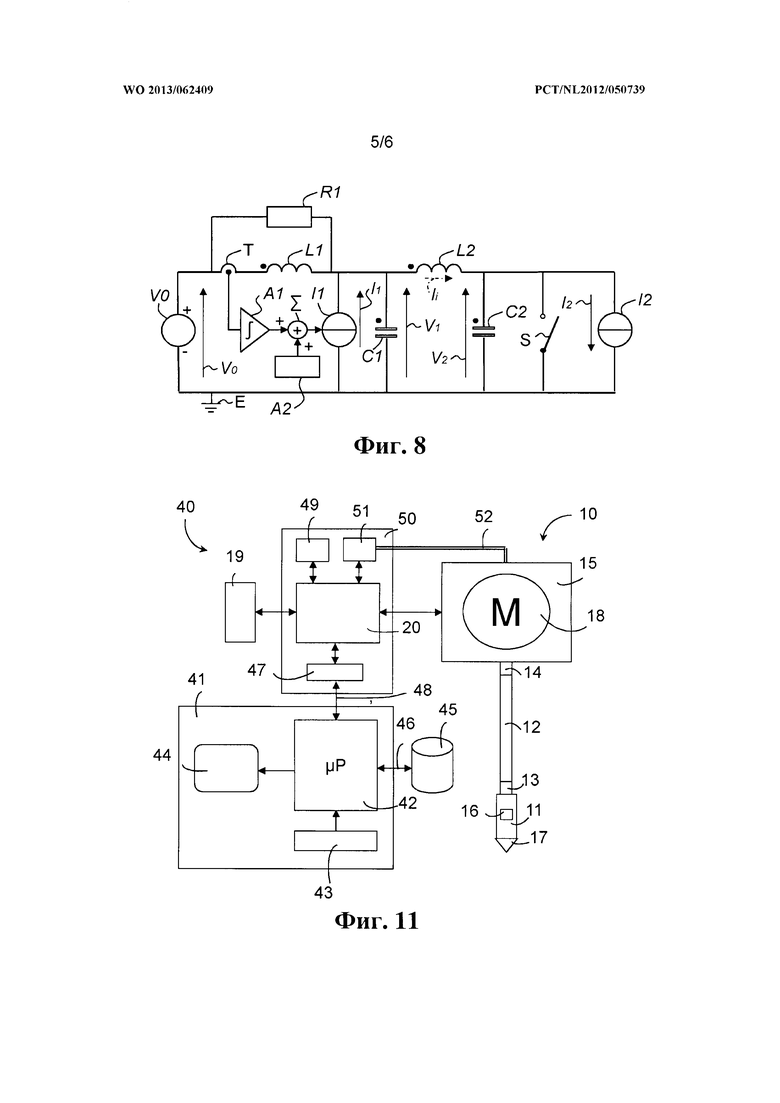
На фиг. 8 схематически показана электрическая эквивалентная схема, образующая вычислительную модель для компьютерного моделирования условия прерывистого скольжения скважинного оборудования по фиг. 1 в соответствии с изобретением, содержащую дополнительное интегральное регулирование.
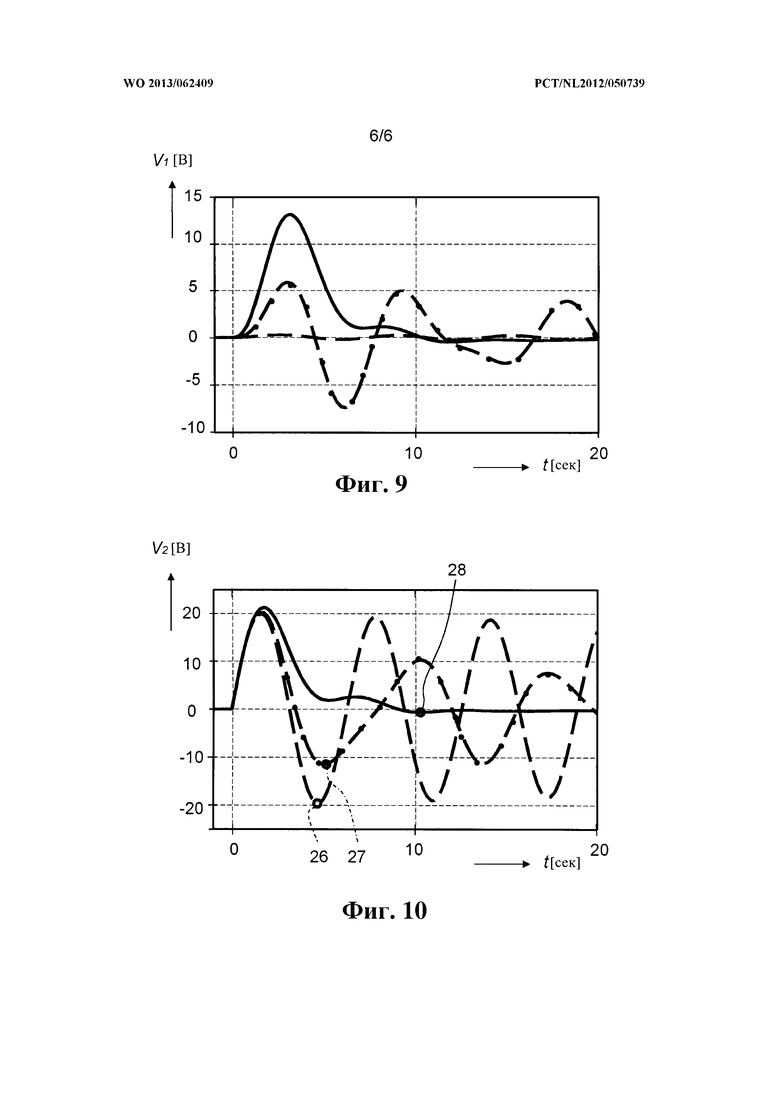
На фиг. 9 показано смоделированное поведение во времени для скорости поворота системы привода, полученное для модели по фиг. 8 при переходе от режима прилипания в режим скольжения при трех сериях моделирования.
На фиг. 10 показано смоделированное поведение во времени для скорости поворота оборудования низа бурильной колонны, полученное для модели по фиг. 8 при переходе от режима прилипания в режим скольжения при трех сериях моделирования.
На фиг. 11 показано схематическое представление скважинного оборудования оборудованного и работающего в соответствии с изобретением, содержащего электронный интегральный контроллер пропорционально-интегрального типа для управления скоростью поворота системы привода.
Подробное описание изобретения
На фиг. 1 очень схематическим образом показано обычное скважинное оборудование 10 буровой установки для бурения буровой скважины в толще земных пород. Режущий инструмент для выполнения этих буровых скважин называют буровым долотом 17, он присоединен к оборудованию 11 низа бурильной колонны на нижнем конце 13 буровой колонны 12. На верхнем ее конце 14 эта буровая колонна 12 присоединена к системе 15 поворотного привода.
Буровая колонна 12 содержит участки полых труб или бурильных труб, соединенных друг с другом посредством резьбы на их концах. Длина обычной буровой колонны составляет несколько километров (от 0 до 10 км), наружный диаметр бурильной трубы составляет приблизительно 100-300 мм, а толщина стенки составляет приблизительно 10-50 мм. Оборудование 11 низа бурильной колонны содержит более тяжелые трубы, наружный диаметр которых может, например, приблизительно составлять 250-500 мм, а толщина стенки приблизительно 100 мм, называемые утяжеленными бурильными трубами. Длина оборудования низа бурильной колонны обычно составляет 100-300 м. Буровая колонна 12 выполнена очень тонкой по сравнению с ее длиной.
Хотя это и не показано, при реальном бурении промывочную жидкость закачивают через бурильные трубы буровой колонны 12 к буровому долоту 17 для охлаждения и смазки бурового долота 17. Обломки, получаемые при операции бурения, возвращают назад вверх на поверхность промывочной жидкостью, протекающей через кольцевое пространство, образованное между внешней окружностью буровой колонны 12 и буровой скважиной (не показано).
Оборудование 11 низа бурильной колонны содержит несколько датчиков и трансмиттеров 16 и направляющий инструмент (не показан) для направления оборудования 11 низа бурильной колонны с целью бурения буровой скважины в определенном направлении в толще земных пород, например по вертикали, по горизонтали или с отклонением на некоторый угол и, конечно, в виде комбинаций этих вариантов.
Система 15 привода содержит поворотный двигатель 18 системы привода, также называемый верхним приводом или столом ротора и предназначенный для поворота буровой колонны 12, оборудования 11 низа бурильной колонны и посредством этого бурового долота 17. В настоящее время двигатель системы привода обычно представляет собой электродвигатель, например асинхронный электродвигатель мощностью 800 кВт, питаемый силовым преобразователем. Однако изобретение в равной степени применимо с синхронным двигателем, двигателем постоянного тока со щетками, дизельным двигателем, гидравлическим двигателем и т.п. Хотя это и не показано явно, между двигателем 18 системы привода и буровой колонной 12 может быть введена коробка передач с определенным значением передаточного отношения или диапазоном значений передаточного отношения.
При использовании верхний конец 14 буровой колонны 12 тянут вверх посредством лебедки. На нижнем конце 13 оборудование 11 низа бурильной колонны опирается буровым долотом 17 на толщу земных пород. Тонкие бурильные трубы буровой колонны 12 постоянно подвержены воздействию растягивающего усилия, хотя толстостенная нижняя часть оборудования 11 низа бурильной колонны частично подвержена сжатию. Растягивающее усилие в бурильных трубах делает невозможным продольный изгиб секции бурильной трубы. Однако крутильная жесткость секции бурильной трубы относительно мала вследствие ее тонкой конструкции. Оборудование 11 низа бурильной колонны выполнено жестким в направлении кручения, но подвержено боковым прогибам вследствие сжимающего усилия, действующего на буровое долото 17.
Данные и информация о ходе бурения выведены на пульт 19, содержащий дисплей или другое устройство вывода данных (не показано) и устройство ввода, например клавиатуру, сенсорный экран и т.п. (не показано), посредством которых при использовании промежуточного контроллера 20 скорости оператор способен управлять скоростью поворота системы 15 привода и/или предельным значением крутящего момента для системы 15 привода с целью управления скоростью поворота бурового долота 17.
На практике было разработано и использовано несколько типов контроллеров 20 скорости, операция управления которых соответствует известному контроллеру пропорционально-интегрального типа, способному выполнять регулирование пропорционального P типа и регулирование интегрального I типа. Например, при использовании электродвигателя 18 системы привода контроллер 20 скорости может быть выполнен с возможностью управления посредством обратной связи от любых или всех измеряемых переменных, таких как ток двигателя 15 привода, скорость поворота двигателя привода, и интенсивность осцилляций величин тока двигателя привода и скорости поворота. Это, например, предназначено для управления потоком энергии в системе 15 привода посредством управления любым или обеими из этих переменных.
Хотя система 15 привода может работать в различных режимах, например в так называемом режиме свинчивания и монтажа, изобретение относится к режиму бурения, в ходе которого оператор имеет целью эффективный размол или отрезание материала из толщи земных пород или геологической формации посредством нажима и поворота бурового долота 17 и промывания буровой скважины промывочной жидкостью или раствором.
Опыт показывает, что относительно постоянная скорость поворота бурового долота 17 оптимальна для эффективного проникновения в земные породы, низкого износа бурового оборудования, почти полного отсутствия вихревых вибраций и хороших условий управляемости оборудования 11 низа бурильной колонны. Обычные скорости поворота бурового долота в стационарном режиме составляют величину немного выше 100 оборотов в минуту с крутящим моментом привода, приложенным к буровому долоту 17 и зависящим от установленной нагрузки на долото.
Во время бурения в результате механического контакта буровой колонны 12 и/или бурового долота 17 с геологической структурой в буровой скважине и в ее окрестности буровая колонна 12 и буровое долото 17 претерпевают осцилляции силы трения. Силы трения, приложенные к буровому долоту 17 и к нижней концевой части 13 буровой колонны, вызывают возникновение фрикционного крутящего момента 35, который способен вызывать крутящие вибрации прерывистого скольжения вследствие податливости бурильных труб буровой колонны 12 при кручении, что, главным образом, проявляет себя в виде работающей на кручение пружины с определенной константой пружины или жесткостью колонны Ks [Нм/рад]. Система 15 привода вследствие ее существенного момента инерции Jd [кгм2] не проявляет немедленного отклика на такие флуктуации силы трения.
В результате этого во время стационарной работы бурового долота 17 увеличение трения заставляет буровое долото 17 замедлять поворот, и в самой серьезной ситуации буровое долото 17 может прийти к полной неподвижности. При неподвижности бурового долота 17 или в ситуации, близкой к такой неподвижности, что названо режимом прилипания, система 15 привода, управляемая контроллером скорости 10, продолжает поворот и ведение буровой колонны 12. Поскольку оборудование низа бурильной колонны не выполняет поворот или почти не выполняет поворот, пружинообразное поведение буровой колонны 12 приводит к закручиванию буровой колонны 12, в результате чего увеличение крутящего момента, воздействующего на оборудование 11 низа бурильной колонны, происходит до уровня, преодолевающего трение отрыва. В данный момент времени оборудование 11 низа бурильной колонны и буровое долото 17 снова начинают поворот, называемый режимом скольжения.
Нелинейная диаграмма, показанная на фиг. 2, представляет в качестве примера зависимость момента сил трения Tb [Нм], воздействующих на буровое долото, от скорости поворота ωb [рад/с] во время работы бурового долота с прерывистым скольжением. Вследствие иллюстративного характера этой зависимости никакие конкретные значения параметров не обозначены на фиг. 2.
При полной неподвижности, то есть в режиме прилипания, ωb=0, и величина Ts представляет собой величину крутящего момента привода, при котором происходит преодоление трения в режиме прилипания, также называемую крутящим моментом отрыва. Величина крутящего момента в стационарном режиме при разумной скорости поворота бурового долота обозначена как Td. В разумном предположении Ts ~ 2 Td. Можно предположить, что и Td и Ts зависят от нагрузки на долото почти линейным образом.
На основании фиг. 2 могут быть рассмотрены динамические характеристики при прерывистом скольжении. При воздействии увеличенного трения на буровое долото и/или буровую колонну во время стационарной работы, то есть при величине Td крутящего момента бурового долота, происходит замедление поворота бурового долота до тех пор, пока величина крутящего момента Tb, воздействующего на буровое долото, не начнет увеличение и достигнет значения Ts, при котором происходит отрыв бурового долота. В результате чего происходит увеличение скорости ωb поворота бурового долота и уменьшение крутящего момента, воздействующего на буровое долото, до значения Td, которое слишком мало, чтобы преодолеть трение, в результате чего происходит замедление бурового долота с повторением цикла прерывистого скольжения.
Отметим, что буровое долото не обязательно должно прийти к полной неподвижности, то есть к ωb=0 рад/с, но может быть замедлено до столь малых значений угловой скорости поворота, как, например, 0,1 рад/с.
Было замечено, что такие осцилляции прерывистого скольжения очень вредны для эксплуатационного срока службы бурового долота, эффективности операций по бурению скважины в целом и представляют собой основную причину возникновения серьезных вибраций скважинного оборудования, приводящих к увеличенной вероятности повреждений и риску раскручивания бурильных труб, составляющих буровую колонну.
Важное наблюдение состоит в том, что не имеет место постоянная частота осцилляций прерывистого скольжения. Было замечено, что при медленном понижении скорости верхнего конца буровой колонны в режиме прерывистого скольжения происходит увеличение времени между последовательными максимумами скорости поворота бурового долота. Это можно понять на основании того, что при уменьшении скорости верхнего конца закручивание буровой колонны происходит более медленно, так что также происходит увеличение времени, при котором достигнуто значение крутящего момента с высвобождением. Такое нелинейное поведение и очень низкая скорость поворота бурового долота или оборудования низа бурильной колонны вплоть до и включая нулевую скорость препятствуют использованию надежного частотного или волнового подхода для описания явления прерывистого скольжения.
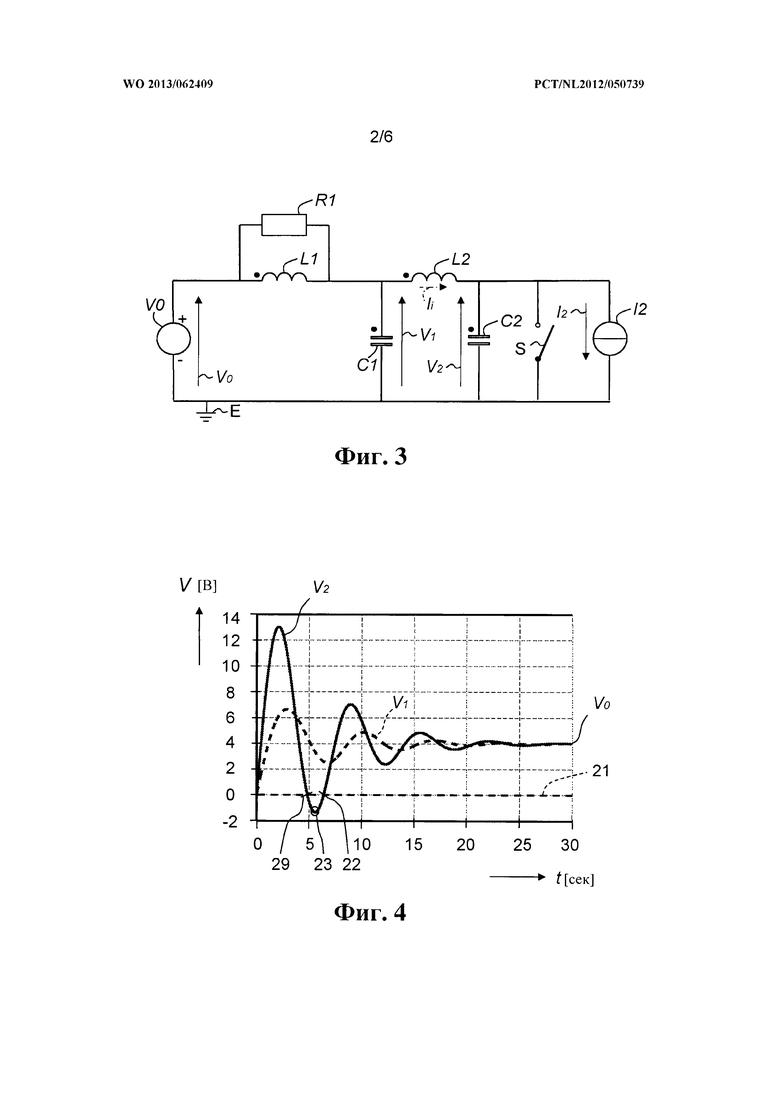
На фиг. 3 схематически показана электрическая эквивалентная схема, содержащая электрические элементы, образующие вычислительную модель для компьютерного моделирования условия прерывистого скольжения скважинного оборудования по фиг. 2 в соответствии с изобретением.
В модели по фиг. 3 буровая колонна 12, главным образом работающая как работающая на кручение пружина, смоделирована в виде катушки L2 индуктивности со значением индуктивности L2 = 1/Ks [Гн]. Момент инерции системы 15 привода смоделирован в виде конденсатора C1 с емкостью C1 = Jd [Ф]. Момент инерции оборудования низа бурильной колонны смоделирован в виде конденсатора C2 с емкостью С2 = Jb, где Jb равно моменту инерции оборудования 11 низа бурильной колонны. В модели по фиг. 3 катушка L2 индуктивности присоединена последовательно к конденсаторам C1 и C2.
Контроллер 20 скорости смоделирован как обычный контроллер пропорционально-интегрального типа, содержащий источник эталонной скорости ω0, представленный источником напряжения V0 постоянного тока со значением напряжения V0=ω0 [В], и присоединенный последовательно к конденсатору C1 и катушке L2 индуктивности посредством промежуточной параллельной цепи индуктивности/сопротивления, то есть посредством катушки L1 индуктивности со значением индуктивности L1=1/K1 [Ф], представляющей интегральное регулирование I, эквивалентное коэффициенту жесткости K, [Нм/рад], и резистора R1 со значением сопротивления R1 [Ом], представляющего пропорциональное (1 / P) регулирование, эквивалентное демпфированию Cf [Нмс/рад], выполненное контроллером 20 скорости.
В модели или эквивалентной схеме по фиг. 3 скорость ωd поворота системы 15 привода равна напряжению V1, приложенному к конденсатору C1, а скорость ωb поворота оборудования 11 низа бурильной колонны равна напряжению V2, приложенному к конденсатору C2. Крутящий момент Tb, приложенный к оборудованию 11 низа бурильной колонны, смоделирован источником I2 тока со значением тока I2 [А].
При переходе из режима прилипания в режим скольжения на фиг. 3 переключатель S открыт, заставляя ток I2 течь в конденсатор C2. Это отражает операцию при ускорении оборудования низа бурильной машины, начинающейся из состояния неподвижности. Закрытие переключателя S происходит при нулевом значении V2. Переключатель S открыт при превышении крутящим моментом, представленным посредством величины I2, значения Td.
На фиг. 4 показано смоделированное поведение во времени для скорости поворота системы 15 привода и оборудования 11 низа бурильной колонны, полученное для модели по фиг. 3 при переходе из режима прилипания в режим скольжения при настроенных установленных значениях системы. Время t [c] отсчитывают вдоль горизонтальной оси, а напряжение V [В] или скорость поворота ω отсчитывают вдоль вертикальной оси. Напряжение или скорость поворота, равные нулю, обозначены штриховой горизонтальной линией 21 на графике по фиг. 4.
В ходе моделирования, показанного на фиг. 4, следующие значения были использованы для нескольких электрических компонентов по фиг. 3:
V0=4 В ÷ ω0=4 рад/с
C1=200 Ф ÷ Jd=2000 кгм2
C2=500 Ф ÷ Jb=500 кгм2
L1=0,0005 Гн ÷ KI=2000 Нм/рад
L2=0,002 Гн ÷ KS=500 Нм/рад
R1=0,0005 Ом ÷ Cp=2 кНмс/рад
I2=5 кА ÷ Td=5 кНм
Для раствора крутящий момент составляет 5 кНм, что представлено значением I2, равным 5 кА на эквивалентной схеме. Земная порода, вызывающая возникновение прерывистого скольжения, смоделирована переключателем S2, включенным параллельно конденсатору C2. Закрытое (то есть токопроводящее) положение этого переключателя S2 моделирует напряжение V2, равное нулю, что эквивалентно нулевой скорости ωb оборудования низа бурильной колонны, то есть полной неподвижности бурового долота 17.
Вышеупомянутые установленные значения представительны для скважинного оборудования 10 при бурении прямой, вертикальной буровой скважины, например, в известковой земной породе. Специалисты в данной области техники понимают, что возможны и другие установленные значения, такое, например, как другое значение для моделируемого крутящего момента раствора.
В соответствии с изобретением предположено, что буровая колонна 12 предварительно закручена при начальном условии, которое представляет собой крутящий момент в 10 кНм, непосредственно перед окончанием режима прилипания и переходом в режим скольжения. В настроенной электрической модели по фиг. 3 это представлено начальным током Ii в 10 кА, нагруженным в катушку L2 индуктивности. Этот начальный ток Ii показан на фиг. 3 штрихпунктирной линией. В терминах вводной части этот элемент L2, то есть катушка индуктивности в модели, загружен физической величиной, то есть начальным током 10 кА.
Переход из режима прилипания в режим скольжения моделирован посредством открытия переключателя S, то есть перевода его в положение, не пропускающее ток. Однако при моделировании с заранее закрученной колонной переключатель S можно полагать открытым в момент времени t=0, так что нет необходимости проводить моделирование какой-либо операции с переключателем.
На основании моделированной временной зависимости скорости ωd=Vi поворота системы 15 привода (то есть штриховой линии на фиг. 4) и зависимости для скорости ωb=V2 поворота оборудования 11 низа бурильной колонны (то есть сплошная линия на фиг. 4) можно сразу видеть, что после перехода из режима прилипания в режим скольжения при t=0, график скорости поворота оборудования 11 низа бурильной колонны пересекает нулевой уровень, что отмечено позиционными обозначениями 29 и 22, и даже полностью изменяет скорость поворота на обратную, то есть имеет место отрицательное напряжение V2, отмеченное позиционным обозначением 23.
Для уменьшения явления прерывистого скольжения график скорости ωb поворота оборудования низа бурильной колонны не должен подходить слишком близко к нулю и конечно не должен проходить ниже нулевого уровня, как показано для значений V2, полученных на основании релаксационных динамических характеристик на фиг. 4.
При отсутствии режима прилипания очевидно, что скорость поворота системы привода и скорость поворота оборудования низа бурильной колонны в стационарном режиме равны приложенной эталонной скорости V0 поворота.
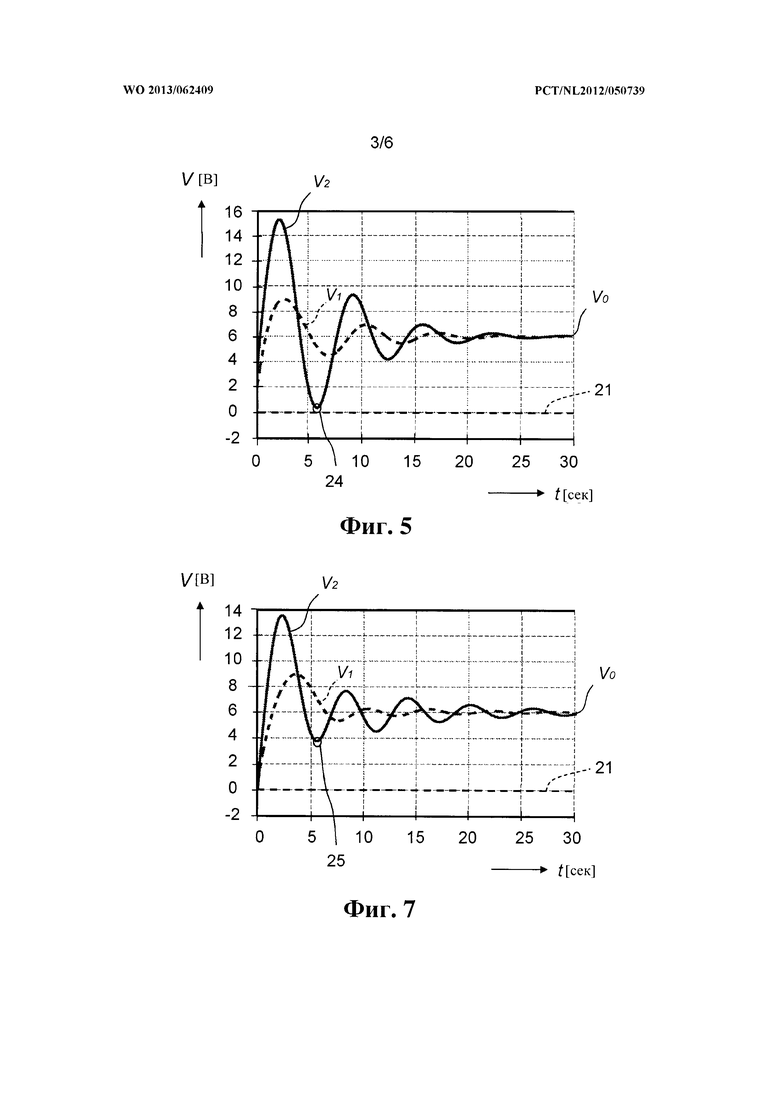
На фиг. 5 показано смоделированное поведение во времени для скорости Vb поворота системы привода (штриховая линия) и скорости V2 оборудования низа бурильной колонны (сплошная линия), полученных для модели по фиг. 3 при переходе из режима прилипания в режим скольжения для тех же самых, что на фиг. 4, установленных значений системы и загруженных значений элементов модели, то есть при величине тока 10 кА, поданного к катушке L2 индуктивности. Эталонная скорость ω0 поворота контроллера 20 скорости теперь установлена равной 6 рад/с, то есть V0=6 В.
Из этих результатов моделирования можно видеть, что график скорости поворота оборудования низа бурильной колонны, то есть график величины V2, больше не пересекает нулевой уровень и даже приходит значительно выше нулевого уровня. Окруженная точка 24 на графике для V2 во время переходного периода по фиг. 5 определяет нижнее предельное значение или критическую скорость ωс поворота системы 15 привода, для которой скорость поворота оборудования 11 низа бурильной колонны не пересекает нулевой уровень 21.
При использовании показанных выше установленных значений и эквивалентной схемы и при управлении контроллером 20 скорости при критической скорости ωс поворота, равной минимальной контрольной скорости поворота, составляющей, например, ω0=6 рад/с, скорость ωb поворота оборудования 11 низа бурильной колонны сохранена достаточно высокой, чтобы препятствовать входу скважинного оборудования в режим прерывистого скольжения.
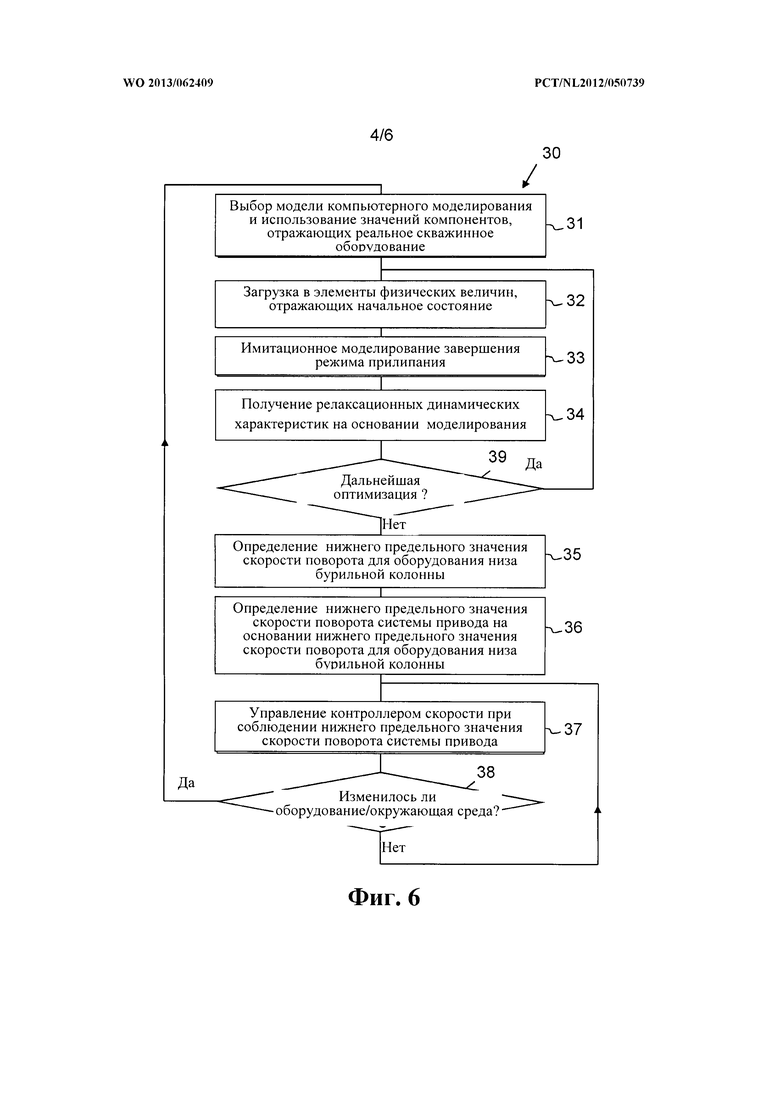
Операции, предназначенные для определения нижнего предельного значения скорости поворота системы привода, то есть, как описано выше, критической скорости, схематично показаны на фиг. 6 в виде блок-схемы 30 способа в соответствии с настоящим изобретением. Направление операций принято от верха листа до его низа. Другие направления обозначены соответствующими стрелками.
В качестве первого этапа скважинное оборудование 10 для бурения буровой скважины в толще земных пород смоделировано эквивалентной вычислительной моделью для компьютерного моделирования, то есть блоком 31 «Выберите модель компьютерного моделирования и используйте значения компонентов, отражающие реальное скважинное оборудование».
Скважинное оборудование содержит несколько частей, среди которых присутствуют буровая колонна 12, оборудование 11 низа бурильной колонны, система 15 поворотного привода и контроллер 20 скорости для управления скоростью поворота бурового долота 17. Выбранная модель содержит элементы, отражающие реальное механическое и физическое поведение этого скважинного оборудования 10, причем каждому компоненту модели присвоено значение, соответствующее механическим и физическим свойствам той части скважинного оборудования, которую представляет соответствующий компонент. В предпочтительном варианте реализации изобретения модель представляет собой линейную электрическую эквивалентную схему типа, показанного на фиг. 3, посредством которой поведение во времени скорости поворота агрегата буровой скважины 11 может быть определено в зависимости от работы контроллера 20 скорости и скорости поворота системы 15 привода.
Затем, как показано в виде блока 32 «Загрузите в элементы физические величины, отражающие начальное состояние», каждому компоненту модели присваивают значение, соответствующее начальному состоянию. В этом случае начальное условие загружено в соответствии с механическим и физическим состоянием скважинного оборудования как раз перед моментом высвобождения оборудования 11 низа бурильной колонны.
Посредством блока 33 «Моделируйте завершение режима прилипания» момент высвобождения, то есть завершения режима прилипания, смоделирован в модели. Как описано выше со ссылками на фиг. 3, такое моделирование может содержать открытие переключателя S из его закрытого, то есть токопроводящего состояния, в открытое или не проводящее ток состояние. Это приводит к реакции на ступенчатое воздействие в модели, что эквивалентно ступенчатому изменению значения ускорения для оборудования низа бурильной колонны. После превышения скоростью оборудования низа бурильной колонны скорости верхнего привода, крутящий момент бурильной колонны начнет свое уменьшение.
Как показано выше на фиг. 4 и 5, например, имитационная модель, использующая соответствующие начальные условия, весьма подходит для моделирования динамических характеристик оборудования 11 низа бурильной колонны непосредственно после момента высвобождения. Хотя на этих чертежах графически отображены, например, скорость поворота оборудования низа бурильной колонны и системы привода, также может быть обеспечено численное или другое представление отклика. Блок 34 назван «Получение релаксационных динамических характеристик на основании моделирования».
На основании измеренных релаксационных динамических характеристик, представляющих поворотную скорость привода оборудования низа бурильной колонны, может быть определено нижнее предельное значение отклонения вниз. В графическом представлении временной характеристики это самое нижнее значение кривой динамических характеристик, то есть положения 23 и 24 кривой V2 на фиг. 3. Блок 35 назван «Определите нижнее предельное значение скорости поворота для оборудования низа бурильной колонны».
Минимальная скорость поворота или критическая скорость системы 15 привода, предотвращающая появление нулевых или отрицательных значений скорости поворота оборудования 11 низа бурильной колонны, теперь определена на основании полученных релаксационных динамических характеристик (блок 36 «Определите нижнее предельное значение скорости поворота системы привода на основании нижнего предельного значения скорости поворота для оборудования низа бурильной колонны»).
Скважинным оборудованием, то есть контроллером 20 скорости, при наблюдении, как определено выше, критической скорости управляют таким образом, чтобы скорость поворота системы 15 привода оставалась выше нижнего предельного значения (блок 37 «Управление контроллером скорости при наблюдении нижнего предельного значения скорости поворота системы привода»).
Во время бурения буровая колонна 12 будет удлинена на некоторое количество бурильных труб, а направление перемещения бурового долота и материальные свойства пробуриваемой земной породы могут претерпевать изменения, и соответственно будет претерпевать изменение критическая скорость системы привода.
Блок 38 принятия решения «Изменилось ли оборудование/окружающая среда?» предусматривает такое изменение условий. В утвердительном варианте (результат «Да» блока 38 решения) критическая скорость будет определена для измененных условий, то есть повторены блоки 31-37. При столь малых изменениях в скважинном оборудовании, которые не оправдывают новое определение критической скорости (результат «Нет» блока 38), скважинное оборудование продолжит выполнение буровой скважины с установленной скоростью привода, то есть в соответствии с блоком 37.
Решение о том, надо ли снова определять критическую скорость, может быть основано, например, на определяемых значениях длины буровой колонны 12 при входе в режим прилипания и изменениях значений нагрузки на долото, которая должна быть приложена к буровой колонне для проведения, например, бесперебойных буровых операций.
Перед определением нижнего предельного значения скорости привода в блоках 35, 36 или в ходе такого определения может быть проведена оптимизация посредством повторения операций загрузки, моделирования и получения значений в блоках 32, 33, 34, использующих адаптированные значения физических величин и параметров модели, как показано блоком 39 принятия решения («Дальнейшая оптимизация?», результат «Да»).
На фиг. 7 показано смоделированное поведение во времени для скорости Vb поворота системы привода (штриховая линия) и скорости V2 оборудования низа бурильной колонны (сплошная линия), полученных для модели по фиг. 3 при переходе из режима прилипания в режим скольжения для тех же самых, что на фиг. 5, установленных значений системы, однако с повышенным значением величины L1=0,001 Гн, то есть при пониженной жесткости контроллера пропорционально-интегрального типа (Pi=1000 нм/рад).
Как можно видеть, уменьшенное значение KI, то есть уменьшенное интегральное регулирование, выполняемое контроллером 20 скорости, приводит к менее крутой динамической характеристике скорости поворота оборудования 11 низа бурильной колонны, что представляет собой сильно уменьшенный отрицательный выброс величины напряжения V2 и в соответствии с этим сильно уменьшенную критическую скорость системы 15, достаточную для удержания окруженной точки 25 на графике V2 выше нулевого уровня. Таким образом, при моделировании по фиг. 7 эталонная скорость поворота, приблизительно составляющая ω0=3 рад/с, достаточна для избежания ситуации с приближением к нулю или даже обращением в ноль скорости поворота оборудования низа бурильной колонны.
На основании фиг. 7 очевидно, что если контроллер 20 скорости представляет собой контроллер пропорционально-интегрального типа, выполняющий пропорциональное P регулирование и интегральное I регулирование, то посредством уменьшения интегрального регулирования критическую скорость можно уменьшить при бурении буровой скважины скважинным оборудованием с целью эффективного уменьшения осцилляций прерывистого скольжения при пониженной рабочей скорости поворота.
Однако на практике операторы бурового оборудования стремятся в максимально возможной степени поддерживать стабильную буровую операцию, что подразумевает как можно меньшее количество адаптаций для установки параметров контроллера скорости и как можно меньшее время успокоения скважинного оборудования с возвратом к его стационарному режиму после события высвобождения. Далее, операторы хотели бы работать с буровым оборудованием в как можно большем диапазоне скоростей поворота системы привода, причем верхнее предельное значение этого диапазона определено механическими ограничениями системы привода, а нижнее предельное значение диапазона определено отмеченной выше критической скоростью.
Для достижения и уменьшенного времени успокоения и широкого диапазона скоростей поворота системы привода при уменьшении осцилляций прерывистого скольжения в эквивалентной схеме на фиг. 8 выполнено моделирование дополнительного интегрального регулирования со стороны контроллера скорости. Это дополнительное интегральное регулирование выполнено интегратором A1, выход которого присоединен посредством сумматора Σ к управляющему входу источника тока I1, ток I1 которого добавлен к току, протекающему через катушку L2 индуктивности, то есть эквивалентен крутящему моменту в буровой колонне. Для целей моделирования измерение тока, проходящего через L1, схематично обозначено трансформатором T тока.
Вход в интегратор A1 равен току через L1. Интегратор A1 управляет источником тока I1 таким образом, что ток через L1 равен в среднем нулю при использовании среднего крутящего момента в колонне при интегральном I регулировании. Это дополнительное интегральное регулирование в основном работает при увеличении крутящего момента, воздействующего на оборудование 11 низа бурильной колонны, то есть при входе в режим прилипания.
При бурении буровой скважины контроллером скорости управляют, применяя интегральное регулирование, моделируемое в модели скважинного оборудования.
В еще одном варианте реализации изобретения, также схематично показанном на фиг. 8, компенсация момента инерции выполнена компенсатором A2 момента инерции. Компенсатор A2 инерции управляет ускорением для скорости поворота системы привода при бурении буровой скважины посредством скважинного оборудования. Выходной сигнал компенсатора A2 инерции управляет источником I1 тока через сумматор Σ.
При использовании компенсатор A2 инерции управляет током I1, пропорциональным ускорению системы 15 привода, то есть током, проходящим через C1, умноженным на фактор, отражающим эффективное электрическое смещение конденсатора C1 на заряд Q, что приводит к уменьшению эффективной емкости конденсатора C1.
При использовании механических терминов крутящий момент, пропорциональный ускорению системы 15 привода, приложен к верхнему концу 14 буровой колонны 12. Этот дополнительный крутящий момент эффективно уменьшает момент инерции системы 15 привода, испытываемый буровой колонной. В соответствии с этим компенсатор A2 инерции предусмотрен для уменьшения инерции системы привода. Уменьшенное значение инерции быстро ускорит верхний привод в момент высвобождения. Падение напряжения в буровой колонне будет, таким образом, ограничено.
При бурении буровой скважины контроллером скорости управляют, выполняя дальнейшее дополнительное интегральное регулирование, моделируемое в модели скважинного оборудования.
Результат дополнительного интегрального регулирования может быть показан посредством отклика во времени для скорости поворота системы привода и скорости поворота скважинного оборудования при множестве установленных значений контроллера скорости.
На фиг. 9 показан отклик во времени или релаксационные динамические характеристики скорости поворота системы привода, а на фиг. 10 показан отклик во времени или релаксационные динамические характеристики для оборудования низа бурильной колонны.
Штриховая линия представляет собой полученный моделированием отклик во времени для скважинного оборудования в соответствии с моделью и загруженными значениями по фиг. 3 и контроллером скорости пропорционально-интегрального типа с установленными значениями компонентов:
C1=2000 Ф ÷ Jd=2000 кгм2
C2=500 Ф ÷ Jb=500 кгм2
L1=0,0005 Гн ÷ KI=20 кНм/рад
L2=0,002 Гн ÷ KS=500 Нм/рад
R1=0,0005 Ом ÷ Cp=2 кНмс/рад
Штрихпунктирная линия представляет собой полученный моделированием отклик во времени для скважинного оборудования в соответствии с коммерчески доступным известным способом управления посредством контроллера скорости, известным как SOFT TORQUE® и описанным в патенте США №5117926. Относительные установленные значения компонентов по сравнению с электрической схемой по фиг. 3 таковы:
C1=2000 Ф ÷ Jd=2000 кгм2
C2=500 Ф ÷ Jb=500 кгм2
L1=0,0005 Гн ÷ KI=20 кНм/рад
L2=0,002 Гн ÷ KS=500 Нм/рад
R1=0,0005 Ом ÷ Cp=2 кНмс/рад
Сплошная линия представляет собой полученный моделированием отклик во времени для скважинного оборудования в соответствии с моделью по фиг. 3 и интегральным контроллером скорости пропорционально-интегрального типа, выполняющим дополнительное интегральное регулирование посредством интегратора A1 и компенсатора A2 инерции, работающими, как описано выше. Эффективные установленные значения компонентов, полученные в результате дополнительного интегрального регулирования в момент высвобождения, равны:
C1=500 Ф ÷ Jd=500 кгм2
C2=500 Ф ÷ Jb=500 кгм2
L1=0,004 Гн ÷ KI=250 кНм/рад
L2=0,002 Гн ÷ KS=500 Нм/рад
R1=0,00118 Ом ÷ Cp=850 Нмс/рад
В механических терминах штриховая линия описывает очень жесткую систему привода. Штрихпунктирная линия описывает систему привода с обратной связью, основанной на токе двигателя (крутящем моменте) системы привода, а сплошная линия описывает компенсированную систему привода в соответствии с изобретением.
В обоих вариантах моделирования, показанных на фиг. 9 и 10 в соответствии с изобретением, предположено, что буровая колонна 12 предварительно закручена с начальным условием, отражающим крутящий момент в 10 кНм, приложенный к оборудованию низа бурильной колонны непосредственно перед окончанием режима прилипания и его переходом в режим скольжения. В настроенной электрической модели по фиг. 3 это представлено начальным током 10 кА в катушках L1 и L2.
На фиг. 10 самое нижнее значение полученной моделированием скорости поворота оборудования низа бурильной колонны для этих трех вариантов моделирования отмечено кружком с позиционными обозначениями 26, 27, 28 для штриховой, штрихпунктирной и сплошной линий соответственно. Как описано выше, эти самые низкие значения описывают критическую скорость системы привода, необходимую для удержания этих точек 26, 27, 28 выше нулевого уровня в случае высвобождения из режима прилипания.
В случае жесткой системы привода (штриховая линия) необходима скорость поворота системы приблизительно выше 19,6 рад/с. В случае контроллера SOFT TORQUE® критическая скорость составляет 11,4 рад/с, а случай с компенсацией в соответствии с изобретением требует минимальную поворотную скорость привода лишь в 0,6 рад/с, способную выходить из ситуации прерывистого скольжения при использованных предположениях относительно системы.
На фиг. 9 и 10 можно видеть очень быстрое восстановление, то есть очень малое время перехода компенсированной системы в соответствии с изобретением (сплошная линия) по сравнению с другими вариантами установок. В частности, воздействие дополнительного интегратора A1 способствует в режиме прилипания гораздо более быстрому достижению крутящего момента, достаточного для высвобождения, не жертвуя при этом критической скоростью. Компенсатор A2 инерции помогает ускорить систему привода, как показано на фиг. 9, при удержании достаточно низкой критической скорости, так что скважинное оборудование в состоянии работать в широком диапазоне значений скорости поворота.
На фиг. 11 схематично показано устройство 40 для уменьшения осцилляций прерывистого скольжения в скважинном оборудовании 10 при бурении буровой скважины в земной породе в соответствии с изобретением. В дополнение к скважинному оборудованию 10, показанному на фиг. 1, предложена система 41 для компьютерного моделирования. Система 41 моделирования содержит компьютер или устройство 42 обработки, входной интерфейс 43, например клавиатуру, сенсорный экран или что-то подобное, для выбора модели компьютерного моделирования скважинного оборудования и для установки начальных значений параметров для моделирования работы системы 15 привода и оборудования 11 низа бурильной колонны скважинного оборудования 10. Полученная моделированием временная характеристика скважинного оборудования выведена на внешний интерфейс 44, например графический дисплей, принтер или плоттер, или модуль оценки полученной моделированием характеристики, с целью получения значения критической скорости скважинного оборудования. Имитационная модель, значения параметров и начальные значения, полученные моделированием характеристики и другие соответствующие данные, предназначенные для определения критической скорости в соответствии с изобретением, могут также быть занесены в отдельную базу 45 данных и извлечены из нее, причем эта база данных доступна из системы 41 моделирования. База 45 данных может быть дистанционно удалена от системы моделирования и связана с ней, например, посредством системы 46 связи.
Система 41 моделирования содержит подходящее программное обеспечение и оборудование, предназначенные для моделирования скважинного оборудования 10 посредством расчетной модели для компьютерного моделирования; моделирования в рамках этой модели для режима прилипания оборудования 11 низа бурильной колонны, и применения к модели физических величин, представляющих начальное состояние скважинного оборудования 10 до режима скольжения; имитации в модели режима скольжения оборудования 11 низа бурильной колонны по окончании режима прилипания, и определения на основе этого моделирования режима скольжения нижнего предельного значения скорости поворота системы 15 привода, для которого оборудование 11 низа бурильной колонны выполняет поворот в том же самом направлении, то есть не изменяет свое направление поворота на обратное и сохраняет скорость поворота выше нулевого уровня.
Электронный контроллер 50 в соответствии с изобретением содержит помимо контроллера 20 скорости устройство 47 ограничения скорости, имеющее запоминающее устройство для хранения нижнего предельного значения, то есть критической скорости поворота системы привода, полученной на основании моделирования отклика во времени системой 41 моделирования, как указано выше. Электронный контроллер 50 присоединен к системе 41 моделирования посредством информационного соединения или телекоммуникационной сети 48.
Электронный контроллер 50 может быть выполнен как электронный контроллер пропорционально-интегрального типа или как контроллер пропорционально-интегрального типа с блоком управления 49, выполняющим дополнительное интегральное регулирование, работающее в соответствии с описанным выше интегратором A1. В одном варианте реализации изобретения компенсатор 51 инерции также выполнен в контроллере 50 скорости и организован для работы в зависимости от ускорения двигателя 18 привода (как показано двойной линией 52 и описано со ссылками на фиг. 8). Контроллер 50 скорости как целое может быть выполнен как интегральный контроллер пропорционально-интегрального типа.
На эквивалентной схеме по фиг. 3 буровая колонна смоделирована в виде одной катушки L2 индуктивности, присоединенной так, как показано. Для решения задачи настоящего изобретения различные секции буровой колонны могут быть смоделированы в виде катушки L индуктивности, имеющей подходящее значение величины индуктивности, и конденсатора С, имеющего подходящее значение емкости, отражающее некоторый момент инерции буровой колонны, например, катушка L индуктивности может быть последовательно присоединена к катушке L2 индуктивности, а конденсатор С может быть присоединен от узла соединения катушек L2 и L к заземлению E. Может быть смоделировано несколько таких секций, если принимать во внимание различные свойства земных пород, траекторию буровой колонны в толще земных пород, механические свойства бурильных труб и т.д.
При загрузке начальных условий в элементы модели скважинного оборудования можно применять различные начальные токи в нескольких катушках L, L2, A1 индуктивности и можно при необходимости заряжать конденсатор(-ы) С в соответствии с начальным напряжением.
Кроме того, как ясно специалистам в данной области техники, способ, устройство и электрический контроллер в соответствии с описанным выше изобретением предусматривают изучение влияния на работу скважинного оборудования нескольких установленных параметров, начальных значений и использованных значений физических величин. Это нужно для определения оптимальных установленных значений параметров электронного контроллера для достижения желательного поведения скважинного оборудования при бурении буровой скважины, в особенности для уменьшения осцилляций прерывистого скольжения.
Специалисты в данной области техники понимают, что оборудование низа бурильной колонны и система приводов могут быть смоделированы, а соответствующие элементы цепи могут быть загружены подходящими физическими величинами, то есть величинами тока и заряда, также для более подробного моделирования соответствующих начальных условий.
В соответствии с этим изобретение не ограничено описанными выше вариантами реализации изобретения и может быть модифицировано и усовершенствовано специалистами в данной области техники без выхода за пределы объема изобретения, описанного в приложенных пунктах формулы изобретения, и без необходимости применять изобретательские способности.
Изобретение относится к скважинному оборудованию для бурения скважины в толще земных пород. Техническим результатом является уменьшение осцилляций прерывистого скольжения в скважинном оборудовании для бурения буровой скважины в толще земных пород. Скважинное оборудование моделируют посредством расчетной модели для компьютерного моделирования. Модель содержит элементы, отражающие определенное механическое и физическое поведение скважинного оборудования. В моделированном режиме прилипания скважинного оборудования значения физических величин загружены в элементы, причем эти значения описывают начальное состояние скважинного оборудования до перехода из режима прилипания в режим скольжения. На основании моделирования такого перехода получен временной отклик скоростей поворота системы привода и оборудования низа бурильной колонны скважинного оборудования и определено то нижнее предельное значение скорости поворота системы привода, для которого управляемая поворотная скорость оборудования низа бурильной колонны равна нулю. 4 н. и 16 з.п. ф-лы, 11 ил.
1. Способ уменьшения осцилляций прерывистого скольжения в скважинном оборудовании (10) для бурения буровой скважины в толще земных пород, причем
скважинное оборудование (10) содержит буровую колонну (12), содержащую оборудование (11) низа бурильной колонны и верхний конец (14), присоединенный к системе (15) поворотного привода, и контроллер (20) скорости для управления скоростью поворотного привода указанной системы (15) привода,
причем способ содержит операции:
- управления (37) контроллером (20) скорости таким образом, что скорость привода превышает нижнее предельное значения скорости привода при бурении буровой скважины скважинным оборудованием (10), причем нижнее предельное значение скорости привода определено на основании
- моделирования (30) указанного скважинного оборудования (10) посредством эквивалентной расчетной модели для компьютерного моделирования,
- загрузки (32) элементов указанной модели физическими величинами, представляющими начальное состояние указанного скважинного оборудования (10), вызывающего переход указанного оборудования низа бурильной колонны из режима прилипания в режим скольжения,
- имитационного моделирования (33) в указанной загруженной модели перехода, отражающего указанный переход указанного оборудования (11) низа бурильной колонны из режима прилипания в режим скольжения,
- получения (34) значений релаксационных динамических характеристик в указанной модели на основании указанной операции имитационного моделирования (33) и определения скорости поворота под действием привода для оборудования (11) низа бурильной колонны, и
- определения (36) на основании указанных релаксационных динамических характеристик указанного нижнего предельного значения скорости привода как скорости привода, при которой указанная скорость поворота под действием привода для указанного оборудования (11) низа бурильной колонны равна нулю.
2. Способ по п. 1, в котором
указанная операция (33) имитации содержит использование реакции на ступенчатое воздействие от указанной нагруженной модели, отражающей указанный переход оборудования (11) низа бурильной колонны из режима прилипания в режим скольжения.
3. Способ по п. 1 или 2, в котором
контроллером (20) скорости управляют (37) таким образом, что указанная скорость привода во время стационарной работы указанной системы (15) привода низка насколько возможно над указанным нижним предельным значением скорости привода.
4. Способ по п. 1 или 2, в котором
указанные физические величины, отражающие указанное начальное состояние указанного скважинного оборудования (10), содержат предварительно закрученную буровую колонну (12) в результате режима прилипания указанного оборудования (11) низа бурильной колонны.
5. Способ по п. 1 или 2, в котором
указанное моделирование (30) включает в себя описание фактической земной породы, в которой выполнена буровая скважина, и промывочной жидкости.
6. Способ по п. 1 или 2, в котором
указанная модель (30) представляет собой электрическую эквивалентную схему, модель в пространстве состояний или модель динамического моделирования.
7. Способ по п. 1 или 2, в котором
указанное определение (36) указанного нижнего предельного значения скорости привода повторено (38) после модификации части указанного скважинного оборудования.
8. Способ по п. 1 или 2, в котором
контроллер (20) скорости представляет собой контроллер пропорционально-интегрального типа, выполняющий пропорциональное P регулирование и интегральное I регулирование, причем
указанные виды (P и I) регулирования установлены такими, чтобы уменьшать указанное нижнее предельное значение скорости привода при использовании указанной реакции на ступенчатое воздействие и управлении контроллером (20) скорости с применением указанного интегрального регулирования при бурении буровой скважины посредством указанного скважинного оборудования (10).
9. Способ по п. 8, в котором
контроллер (20) скорости выполняет дополнительное интегральное регулирование (A1, 49), которое установлено таким, чтобы ускорять успокоение значения скорости оборудования (11) низа бурильной колонны под действием привода при использовании указанной реакции на ступенчатое воздействие и управлении контроллером (20) скорости с применением указанного интегрального регулирования при бурении буровой скважины посредством скважинного оборудования (10).
10. Способ по п. 9, в котором
дополнительное интегральное регулирование (A1, 49) установлено пропорциональным коэффициенту жесткости буровой колонны (12), смоделированной в виде работающей на кручение пружины.
11. Способ по п. 8, в котором
контроллер (20) скорости выполняет компенсацию инерции (A2; 51), причем компенсация инерции управляет ускорением для скорости привода в системе (15) привода для обеспечения компенсации инерции указанной системы (15) привода при бурении буровой скважины указанным скважинным оборудованием (10).
12. Способ по п. 1 или 2, в котором
операции моделирования (31), загрузки (32), имитационного моделирования (33), получения значений (34) и определения (36) выполняют в системе (41) для компьютерного моделирования, выполненной отдельно от указанного скважинного оборудования (10).
13. Устройство (40) для уменьшения осцилляций прерывистого скольжения в скважинном оборудовании (10) для бурения буровой скважины в толще земных пород, причем
скважинное оборудование (10) содержит буровую колонну (12), содержащую оборудование (11) низа бурильной колонны и верхний конец (14), присоединенный к системе (15) поворотного привода, и контроллер (20) скорости для подачи эталонного крутящего момента к указанной системе (15) привода, причем контроллер (20) скорости выполнен для управления указанной системой (15) привода таким образом, чтобы указанная скорость привода превышала нижнее предельное значение скорости привода при бурении буровой скважины посредством указанного скважинного оборудования (10),
и дополнительно содержащее систему (41) для компьютерного моделирования, выполненную для
- моделирования (31) указанного скважинного оборудования (10) посредством эквивалентной расчетной модели для компьютерного моделирования,
- загрузки (32) элементов указанной модели физическими величинами, представляющими начальное состояние указанного скважинного оборудования (10), вызывающего переход указанного оборудования (11) низа бурильной колонны из режима прилипания в режим скольжения,
- имитационного моделирования (33) в указанной загруженной модели перехода, отражающей указанный переход указанного оборудования (11) низа бурильной колонны из режима прилипания в режим скольжения,
- получения (34) значений релаксационных динамических характеристик в указанной модели на основании указанной операции имитационного моделирования (33) и определения скорости поворота под действием привода для оборудования (11) низа бурильной колонны, и
- определения (36) на основании указанных релаксационных динамических характеристик указанного нижнего предельного значения скорости привода как скорости привода, при которой указанная скорость поворота под действием привода для указанного оборудования (11) низа бурильной колонны равна нулю.
14. Устройство (40) по п. 13, в котором
указанный контроллер (20) скорости содержит
блок контроллера пропорционально-интегрального типа, выполняющий пропорциональное P регулирование и интегральное I регулирование, и
блок (49) управления, выполняющий дополнительное интегральное регулирование для управления системой (15) привода, чтобы ускорить успокоение скорости под действием привода для указанного оборудования (11) низа бурильной колонны (11) при бурении буровой скважины указанным скважинным оборудованием (10).
15. Устройство (40) по п. 14, в котором
контроллер (20) скорости содержит компенсатор (51) инерции, выполненный с возможностью управления ускорением для скорости системы (15) привода для обеспечения компенсации инерции указанной системы (15) привода при бурении буровой скважины посредством скважинного оборудования (10).
16. Устройство (40) по п. 14 или 15, в котором
контроллер (20) скорости представляет собой электронный контроллер, выполненный как интегральный контроллер пропорционально-интегрального типа.
17. Электронный контроллер (50) для управления поворотной скоростью привода системы (15) поворотного привода в скважинном оборудовании (10) для бурения буровой скважины в толще земных пород, причем
скважинное оборудование (10) содержит буровую колонну (12), содержащую оборудование (11) низа бурильной колонны и верхний конец (14), соединенный с указанной системой (15) поворотного привода, причем
электронный контроллер содержит устройство (47) ограничения скорости привода с запоминающим устройством, предназначенным для хранения значения нижнего предельного значения скорости привода для указанной скорости привода, полученной посредством способа в соответствии с любым из пп. 1-12.
18. Электронный контроллер (50) по п. 17, содержащий
контроллер пропорционально-интегрального типа, выполняющий пропорциональное P регулирование и интегральное I регулирование для управления указанной системой (15) привода,
и содержащий по меньшей мере
блок (49) управления, выполняющий дополнительное интегральное регулирование для управления системой (15) привода, чтобы ускорить успокоение скорости под действием привода для указанного оборудования (11) низа бурильной колонны при входе в режим прилипания из режима скольжения, или
компенсатор (51) инерции, выполненный с возможностью управления ускорением для скорости привода в системе (15) привода для обеспечения компенсации инерции указанной системы (15) привода при бурении буровой скважины посредством скважинного оборудования (10).
19. Электронный контроллер (50) по п. 17 или 18, в котором электронный контроллер выполнен как интегральный контроллер пропорционально-интегрального типа.
20. Скважинное оборудование (10) для бурения буровой скважины в толще земных пород, причем
скважинное оборудование (10) содержит буровую колонну (12), содержащую оборудование (11) низа бурильной колонны и верхний конец (14), соединенный с системой (15) поворотного привода, и устройство (40) для управления скоростью поворота привода указанной системы (15) привода в соответствии с любым из пп. 13-16.
| WO 2010063982 A1, 10.06.2010 | |||
| Система автоматического управления электротормозной машиной буровой лебедки | 1990 |
|
SU1737107A1 |
| СПОСОБ УПРАВЛЕНИЯ КОЛЕБАНИЯМИ В БУРОВОМ ОБОРУДОВАНИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2087701C1 |
| US 5117926 A1, 02.06.1992 | |||
| US 6785641 B1, 31.08.2004. | |||

