Область техники, к которой относится изобретение
Настоящее изобретение относится к медицинской системе визуализации, а также к способу обеспечения рентгеновского изображения.
Уровень техники
Для травматологического рентгеновского применения технический персонал обычно должен подносить детектор и рентгеновскую трубку к пациенту, лежащему на травматологической тележке, в среде с большим количеством людей вокруг. Пациент может быть соединен проводом с медицинским оборудованием, что может помешать рентгеновскому обследованию. Следовательно, травматологические рентгеновские применения являются сложными.
Обычно для рентгеноскопии в таких условиях применяются два общих различных потока операций в зависимости от размера, формы и положения объекта, подлежащего исследованию. В первом потоке операций рентгеновская трубка подгоняется к интересующей области, в которой она устанавливается так, чтобы она была совмещена с внешними/внутренними размерами соответствующей анатомии пациента. Детектор должен быть выровнен в соответствии с положением рентгеновской трубки на некотором предварительно заданном «расстоянии до исходного изображения» (SID) таким образом, чтобы центр детектора совпадал с центральной областью рентгеновского пучка. Следовательно, «основную функцию» выполняет рентгеновская трубка. Во втором потоке операций рентгеновская трубка свободно испускает рентгеновские лучи, ограниченные коллиматором до пределов интересующей области. Портативный рентгеновский детектор позиционируют относительно интересующей области. Следовательно, «основную функцию» выполняет детектор.
Для первого типа потока операций детектор и рентгеновская трубка соединяются механически. Детектор устанавливается на механическом кронштейне, соединенном с рентгеновской трубкой. Всякий раз, когда рентгеновская трубка перемещается относительно пациента, детектор следует за ней на предварительно заданном расстоянии при зафиксированных пространственных отношениях.
Для второго потока операций механический кронштейн может быть отложен в сторону, освобождая таким образом детектор от зафиксированных пространственных отношений и позволяя использовать рентгеновскую трубку для произвольного облучения.
Раскрытие изобретения
В травматологических средах может быть предпочтительным уменьшить вес и габариты устройства рентгеновской визуализации так, чтобы оно могло очень легко перемещаться и позиционироваться и, кроме того, уменьшить занимаемое место около пациента. Устройство рентгеновской визуализации, имеющее складывающуюся механическую связь между рентгеновским источником и детектором, может загромождать некоторое пространство вокруг пациента.
Кроме того, может быть предпочтительным изменять или управлять расстоянием между рентгеновской трубкой и детектором более индивидуально для того, чтобы увеличить свободное место на пациенте всякий раз, когда это необходимо.
Следовательно, может существовать потребность в менее объемном устройстве рентгеновской визуализации, которое можно было бы легче перемещать и устанавливать, чем известные рентгеновские травматологические устройства, которое позволяло бы свободное облучение в случае необходимости и которое создавало бы меньше пространственных препятствий.
Эта потребность может быть удовлетворена системой рентгеновской визуализации в соответствии с признаками независимого пункта 1 формулы изобретения. Предпочтительные варианты осуществления и дополнительные улучшения могут быть получены из зависимых пунктов формулы изобретения и последующего описания.
Система рентгеновской визуализации в соответствии с настоящим изобретением содержит рентгеновскую трубку, потолочную подвеску для рентгеновской трубки, тележку детектора со смонтированным на ней рентгеновским детектором, матрицу активных датчиков, блок оптической индикации и блок управления. Матрица активных датчиков неподвижно устанавливается на потолочной подвеске. Блок оптической индикации неподвижно устанавливается на тележке детектора и выполнен с возможностью излучения оптической индикации на матрицу активных датчиков. Блок управления соединяется с матрицей активных датчиков и выполнен с возможностью получения положения оптической индикации на матрице активных датчиков и формирования управляющих сигналов для управления по меньшей мере одним из потолочной подвески и тележки детектора для регулирования положения оптической индикации по отношению к предварительно заданному положению.
Тележка детектора представляет собой тележку, которая имеет основу, которая приспособлена для поддержания тележки на полу операционной. Понятно, что тележка детектора имеет такие размеры, что детектор, соединенный с ней, может перемещаться под травматологической тележкой, не сталкиваясь с элементами травматологической тележки. В свете настоящего изобретения становится ясным, что тележка детектора содержит средство привода и/или приводное средство, которое может приводиться в действие посредством управляющих сигналов для перемещения тележки детектора на полу операционной.
Потолочная подвеска поддерживает рентгеновскую трубку и оборудована средством привода для перемещения рентгеновской трубки по меньшей мере вдоль плоскости, параллельной потолку. Предпочтительно также может регулироваться расстояние от рентгеновской трубки до потолка, корректируя таким образом расстояние между детектором и рентгеновским источником (SID). Средство привода может приводиться в действие управляющими сигналами.
Поскольку блок оптической индикации излучает оптическую индикацию на матрицу активных датчиков, блок управления тогда может обнаружить взаимное положение рентгеновского источника и детектора. Если требуемое взаимное положение между детектором и рентгеновским источником является предварительно заданным, блок управления может определить отклонение/разность от предварительно заданного положения детектора относительно рентгеновского источника путем получения положения излучаемой оптической индикации относительно матрицы активных датчиков и сравнить его с предварительно заданным положением. Блок управления может затем формировать управляющие сигналы, которые передаются тележке детектора и/или потолочной подвеске. Например, может быть сформирована первая команда, которая передается тележке детектора для того, чтобы скорректировать положение тележки детектора. Также может быть сформирована вторая команда, которая передается потолочной подвеске для того, чтобы скорректировать положение потолочной подвески. На основе заданных законов управления либо потолочная подвеска, либо тележка детектора перемещаются посредством интегрированного средства привода к предварительно заданному взаимному положению.
С помощью этой установки можно легко автоматически связывать положения рентгеновской трубки и тележки детектора. Даже без непосредственного механического звена между тележкой детектора и рентгеновским источником их взаимное положение может быть определено очень точно.
Оптическая индикация может быть таким образом реализована, например, как светоизлучающее средство, такое как лазерное или подобное устройство, испускающее луч света в видимом или невидимом диапазоне частот. Предпочтительно испускаемый луч света имеет веерообразную форму, так что оптическая индикация перекрывает множество активных датчиков, усиливая таким образом определение движения, направления движения и скорости. Вращение тележки детектора относительно потолочной подвески может быть обнаружено, кроме того, только тогда, когда форма веерообразного луча спроектирована таким образом, что она не является абсолютно симметричной.
Процесс позиционирования в системе всегда является системным. «Основная функция» рентгеновской трубки или детектора больше не является обязательной. Полезно управлять процессом позиционирования, перемещая одну только тележку детектора, что приводит к синхронному движению рентгеновской трубки, как если бы рентгеновская трубка была ведущим устройством, поскольку врач проверяет позиционирование посредством светового поля рентгеновской трубки, но само движение инициируется на детекторе.
Кроме того, для того, чтобы инициировать функцию визуализации для требуемой интересующей области на пациенте, врач может также переместить рентгеновскую трубку в требуемое положение и инициировать регулирование положения или позиционирующую связь тележки детектора. В обоих случаях блок управления получает положение тележки детектора по отношению к рентгеновскому источнику и автоматически корректирует положение через управляющие сигналы, отправленные потолочной подвеске или тележке детектора. Может быть разумным использовать управление тележки детектора для точной настройки положения тележки детектора.
Кроме того, возможно, что врач позиционирует рентгеновскую трубку при помощи ручки или подобного и после этого продолжает вручную позиционировать тележку детектора, но без связи между рентгеновской трубкой и тележкой детектора. Ориентация детектора относительно рентгеновской трубки может быть проверена на блоке дисплея, расположенном в непосредственной близости от врача.
Коллиматор может регулироваться средствами ручного управления.
В предпочтительном варианте осуществления матрица активных датчиков содержит массив чувствительных элементов, которые обнаруживают наличие оптической индикации. Чувствительные элементы предпочтительно располагаются в матричной форме и выполнены с возможностью обнаружения попадающей на них оптической индикации. Матрица активных датчиков может выводить сигнал, который содержит либо информацию о положении и движении, которая уже интерпретирована из оптической индикации, либо необработанные данные, содержащие информацию о силе и/или яркости каждого из чувствительных элементов, для его интерпретации посредством блока управления.
Как было упомянуто выше, оптическая индикация на матрице активных датчиков может иметь размер, превышающий размер чувствительного элемента, позволяя таким образом оптической индикации перекрываться на множестве чувствительных элементов.
В предпочтительном варианте осуществления чувствительные элементы выбраны из группы чувствительных элементов, содержащей матрицу фотодиодов, КМОП-матрицу и ПЗС-матрицу. Использование фотодиодов может быть экономически более выгодным, однако КМОП и ПЗС-матрицы могут увеличить точность определения положения и, следовательно, точность определения положения тележки детектора. Кроме того, много подобных чувствительных элементов могут быть выбраны без выхода за границы области охвата настоящего изобретения.
В предпочтительном варианте осуществления оптическая индикация позиционируется перпендикулярно основанию тележки детектора. Тем самым положение оптической индикации относительно устройства потолочной подвески соответствует положению тележки детектора на полу операционной.
В другом предпочтительном варианте осуществления оптическая индикация выполнена с возможностью наложения высокочастотной структуры на оптическую индикацию для того, чтобы избежать помех от других источников, причем по меньшей мере одно из матрицы активных датчиков и блока управления выполнено с возможностью распознавания наложенной высокочастотной структуры. В случае, если блок управления получает необработанные данные от матрицы активных датчиков, блок управления должен интерпретировать данные для того, чтобы обнаружить заданную высокочастотную структуру. С другой стороны, матрица активных датчиков также может содержать электронный блок, который выполнен с возможностью интерпретировать необработанные данные чувствительных элементов и распознавать высокочастотные структуры и выдавать на выход просто информацию о положении и движении.
Предпочтительно высокочастотная структура реализуется как ряд световых импульсов по меньшей мере с одной заданной частотой для того, чтобы обеспечить идентифицируемую оптическую индикацию. Также возможно использовать множество частот для того, чтобы повысить устойчивость процесса идентификации для оптической индикации.
В другом предпочтительном варианте осуществления рентгеновская трубка интегрирована в корпус, содержащий дисплей для отображения состояния совмещения рентгеновской трубки и тележки детектора относительно друг друга. Тем самым врачу обеспечивается визуальная помощь.
В предпочтительном варианте осуществления тележка детектора содержит канал передачи данных для того, чтобы передавать управляющие данные между тележкой детектора и блоком управления, позволяя тем самым тележке детектора выдавать управляющие данные, необходимые или дополнительные для того, чтобы управлять системой в целом, инициировать связь между положением детектора и положением рентгеновского источника и получать управляющие сигналы для того, чтобы следовать за положением рентгеновской трубки.
В другом полезном варианте осуществления система визуализации содержит пользовательский интерфейс тележки детектора, имеющий средство ввода для управления потолочной подвеской, причем пользовательский интерфейс тележки соединен с каналом передачи данных. Предпочтительно, чтобы пользовательский интерфейс тележки детектора содержал по меньшей мере одну кнопку «соединено» для синхронизации перемещений тележки детектора и потолочной подвески специально для тех случаев, когда тележка детектора перемещается врачом в требуемое положение, а рентгеновская трубка должна быть автоматически отрегулирована к новому положению тележки детектора. Кроме того, в пользовательский интерфейс тележки должны быть интегрированы верньеры управления коллиматором для регулировки размера коллиматора, а также кнопка SID для того, чтобы изменять расстояние до исходного изображения, например, на 110 или 150 см.
В предпочтительном варианте осуществления блок оптической индикации интегрирован в пользовательский интерфейс тележки детектора, который неподвижно крепится к тележке детектора. Тем самым становится возможным устранить отдельные подставки для отдельных блоков, и система в целом становится еще менее сложной и более компактной.
В предпочтительном варианте осуществления канал передачи данных является беспроводным каналом передачи данных для того, чтобы устранить из системы кабели и тем самым избежать повреждений в операционной.
В соответствии с другим аспектом настоящего изобретения предложен способ обеспечения рентгеновского изображения, содержащий этапы, на которых:
излучают оптическую индикацию из блока оптической индикации, неподвижно установленного на тележке детектора, на матрицу активных датчиков, получают положение оптической индикации на матрице активных датчиков, сравнивают полученное положение с предварительно заданным положением и формируют управляющие сигналы для управления по меньшей мере одним из потолочной подвески и тележки детектора, чтобы регулировать положение оптической индикации в соответствии с предварительно заданным положением. Эти этапы обеспечивают непосредственную связь положений тележки детектора и потолочной подвески в обоих возможных потоках операций.
В предпочтительном варианте осуществления управляющий сигнал передается тележке детектора для регулирования положения тележки детектора при приеме первой команды. Это может быть полезным для точной настройки положения тележки детектора при небольших регулированиях, выполняемых непосредственно на рентгеновской трубке.
В другом предпочтительном варианте осуществления управляющий сигнал передается потолочной подвеске при приеме второй команды. Вторая команда может быть инициирована средством ввода, имеющимся на тележке детектора, как было описано выше.
Другой предпочтительный вариант осуществления может содержать наложение высокочастотной структуры на оптическую индикацию для того, чтобы избежать помех от других источников, как было описано выше.
Следует отметить, что признаки и побочные эффекты настоящего изобретения были описаны со ссылками на различные варианты осуществления настоящего изобретения. Однако специалисту в данной области техники из вышесказанного и последующего описания будет понятно, что если иное не указано в дополнение к любой комбинации или признакам, принадлежащим одному варианту осуществления, также и любые сочетания признаков, относящихся к различным вариантам осуществления или к способу производства, должны рассматриваться как раскрытые в настоящей патентной заявке.
Краткое описание чертежей
Признаки и варианты осуществления, определенные выше, а также дополнительные признаки и преимущества настоящего изобретения также могут быть получены из примеров вариантов осуществления и будут пояснены со ссылками на примеры вариантов осуществления, которые будут описаны ниже в настоящем документе, однако настоящее изобретение не ограничено этими примерами. Ниже настоящее изобретение будет описано более подробно со ссылками на чертежи.
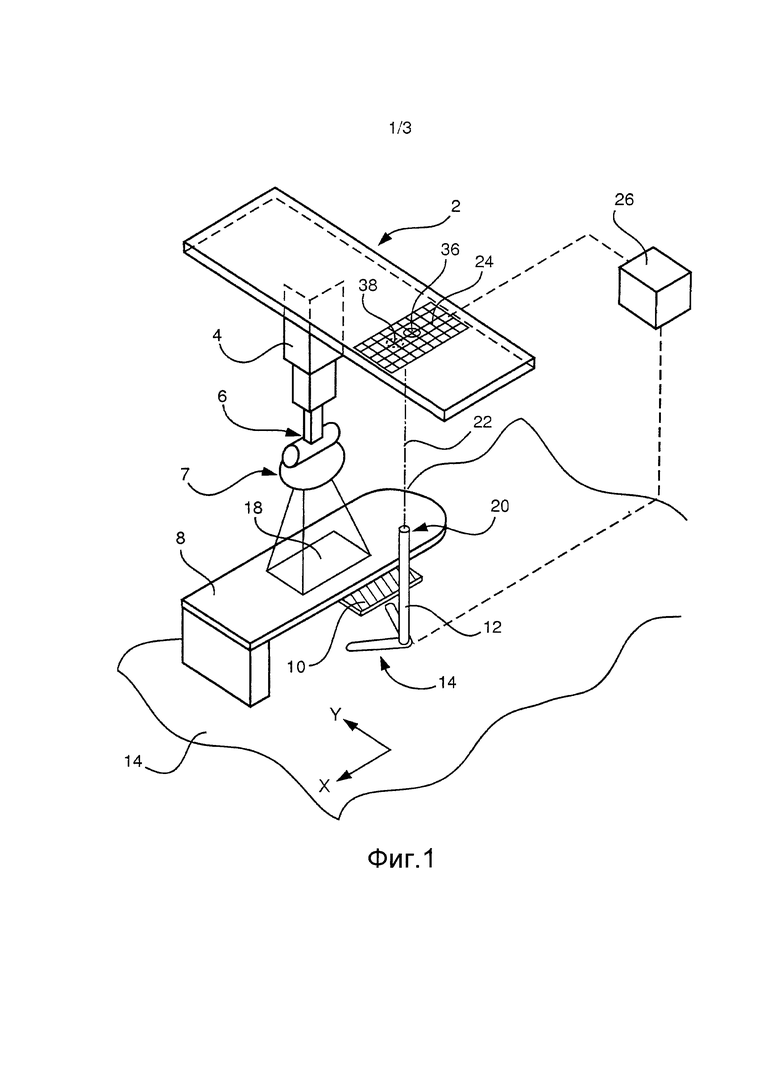
Фиг. 1 показывает общий вид системы для обеспечения рентгеновского изображения.
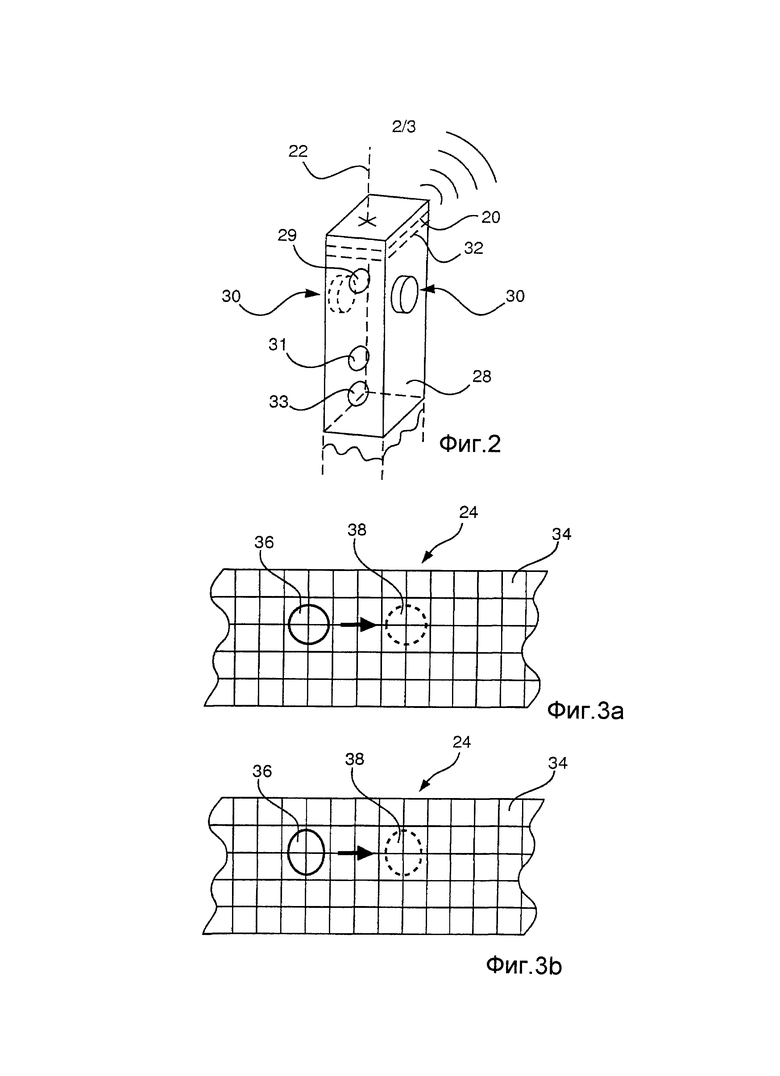
Фиг. 2 показывает деталь тележки детектора.
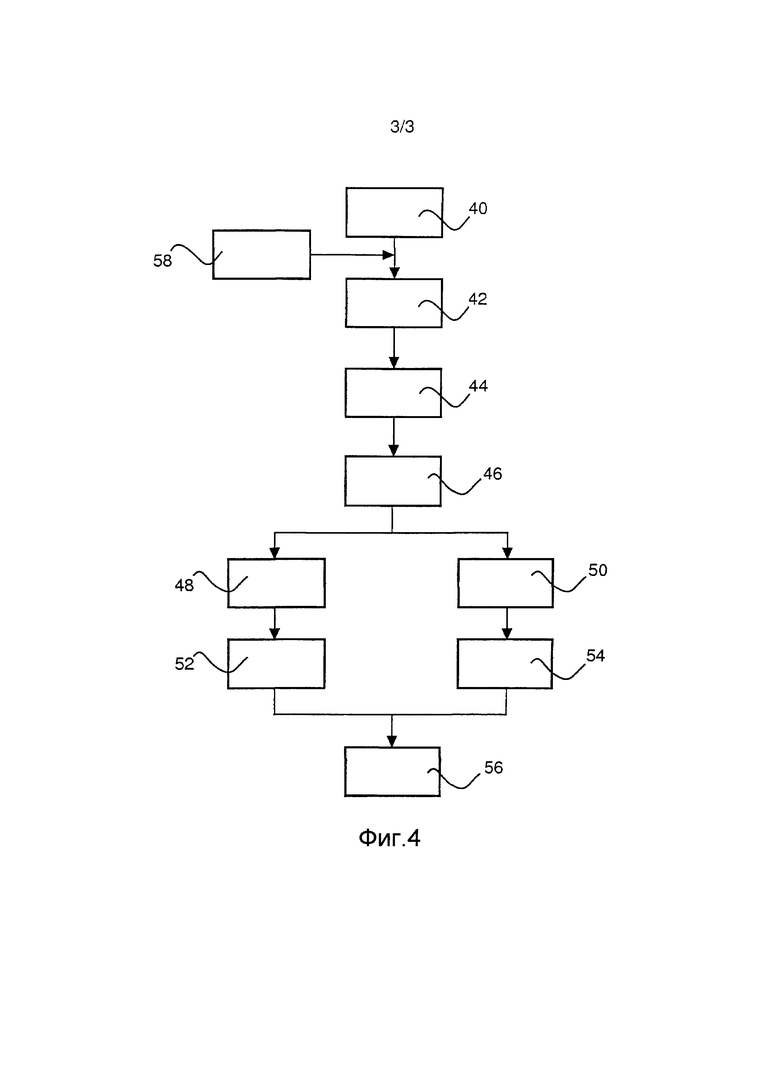
Фиг. 3а и Фиг. 3b показывают схематичный чертеж оптической индикации на матрице активных датчиков с различной оптической индикацией.
Фиг. 4 показывает схему способа обеспечения рентгеновского изображения.
Все чертежи являются схематичными и не предназначены для масштабирования.
Осуществление изобретения
Фиг. 1 показывает общий вид системы в соответствии с настоящим изобретением. Потолочная подвеска 2 поддерживает кронштейн 4 рентгеновской трубки и содержит по меньшей мере одно средство привода для перемещения кронштейна 4 рентгеновской трубки вдоль потолка в направлениях X и Υ. Кронштейн 4 рентгеновской трубки удерживает рентгеновскую трубку 6, выполненную с возможностью испускать рентгеновские лучи в направлении тележки 8 пациента, которая находится под рентгеновской трубкой. Тележка 8 пациента сама по себе не является частью системы в соответствии с настоящим изобретением и показана просто в целях иллюстрации.
Детектор 10 крепится к тележке 12 детектора, которая имеет основание 14, являющееся подвижным в направлениях X и Υ на полу 16. Детектор 10 таким образом может перемещаться под травматологической тележкой 8 и тем самым перемещаться в и из интересующей области 18.
Для соединения или связывания положения детектора 10 с положением рентгеновской трубки 6 блок 20 оптической индикации неподвижно устанавливается на тележке 12 детектора для излучения оптической индикации 22 на матрицу 24 активных датчиков, которая неподвижно устанавливается на потолочной подвеске 2. Блок 20 оптической индикации выравнивается так, чтобы он излучал оптическую индикацию 22 перпендикулярно плоскости пола 16. Таким образом, положение оптической индикации 22 на матрице 24 активных датчиков соответствует фактическому положению тележки детектора.
Блок 26 управления соединяется с матрицей 24 активных датчиков и, следовательно, выполнен с возможностью получения фактического положения тележки 12 детектора относительно потолочной подвески 2. Блок 26 управления изображен схематично, поскольку он может быть интегрирован в потолочную подвеску, в кронштейн 4 рентгеновской трубки, в корпус рентгеновской трубки 6, в тележку 12 детектора или в другой электронный блок, не показанный на Фиг. 1. В последующем предполагается, что блок 26 управления не интегрирован в тележку 12 детектора.
Если тележка 12 детектора должна следовать за положением рентгеновской трубки 6, предпочтительно для точной настройки положения тележки детектора, отклонение между предварительно заданным положением на матрице 24 активных датчиков и фактическим положением оптической индикации 22 может быть интерпретировано как управляющая переменная. Используя подходящий закон управления, блок 24 управления может формировать управляющие сигналы для управления средством привода в тележке 12 детектора для того, чтобы связать положение тележки 12 детектора с положением рентгеновской трубки 6. В альтернативном режиме управления блок 26 управления может связывать положение потолочной подвески 2 путем передачи сформированных управляющих сигналов потолочной подвеске 2 для того, чтобы регулировать ее положение по отношению к фактическому положению тележки 12 детектора.
Как изображено на Фиг. 2, пользовательский интерфейс 28 тележки соединен с тележкой 12 детектора и содержит ряд устройств для ввода данных пользователем. Например, кнопка 29 может быть предназначена для функции соединения для того, чтобы связать положение тележки 12 детектора с положением потолочной подвески 2. Предпочтительно два контроллера 30 могут использоваться для регулирования коллиматора (не показан), а также кнопки или другие устройства 31 и 33 ввода обеспечивают изменение расстояния до исходного изображения (SID), например, либо на 110 см, либо на 150 см.
В пользовательский интерфейс 28 тележки детектора может быть интегрирован блок 20 оптической индикации, и интерфейс может быть дополнительно оборудован блоком 32 канала передачи данных для беспроводного соединения с блоком 26 управления для передачи команд блоку 26 управления или получения управляющих сигналов для корректировки положения.
Фиг. 3а показывает секцию матрицы 24 активных датчиков, содержащую массив чувствительных элементов 34. Оптическая индикация 22 попадает на матрицу 2 4 активных датчиков и таким образом может перекрыть множество чувствительных элементов 34 при формировании пятна 36 индикации. Заданное положение 38 пятна индикации оптической индикации символизируется штриховым кружком. Поскольку блок 26 управления имеет информацию о заданном положении 38 пятна, он может сравнить заданное положение 38 пятна и фактическое положение оптической индикации и тем самым сформировать управляющие сигналы для устранения отклонения.
Хотя на Фиг. 3а показаны круглые пятна 36 и 38 индикации, они могут также быть менее симметричными, например, содержать эллиптические или другие формы, продемонстрированные на Фиг. 3b. Тем самым может быть легко получена вращательная ориентация тележки 12 детектора относительно потолочной подвески.
Наконец, Фиг. 4 показывает блок-схему способа обеспечения рентгеновского изображения, содержащего этапы излучения 40 оптической индикации из блока оптической индикации, неподвижно установленного на тележке детектора, на матрицу активных датчиков, получения 42 положения оптической индикации на матрице активных датчиков, сравнения 44 полученного положения с заданным положением и формирования 46 управляющих сигналов для того, чтобы управлять по меньшей мере одним из потолочной подвески и тележки детектора с тем, чтобы регулировать положение оптической индикации под заданное положение. Управляющий сигнал может быть передан 48 тележке детектора для того, чтобы регулировать 52 положение тележки детектора при приеме первой команды, или может быть передан 50 потолочной подвеске для того, чтобы регулировать 54 положение потолочной подвески при приеме второй команды. После этого может быть получено 56 рентгеновское изображение.
Для того, чтобы улучшить надежность оптической индикации и ее обнаружения, на оптическую индикацию может быть наложена 58 высокочастотная структура.
Наконец, следует отметить, что в настоящем документе слово «содержащий» не исключает других элементов или этапов, а формы единственного числа не исключают множества. Один процессор или другой блок может выполнять функции нескольких элементов, упомянутых в формуле изобретения. Тот факт, что некоторые средства упоминаются в различных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих средств не может использоваться с достижением преимущества. Любые условные обозначения, использованные в формуле изобретения, не должны рассматриваться как ограничивающие область охвата настоящего изобретения.
Перечень ссылочных позиций
2 - потолочная подвеска
4 - кронштейн рентгеновской трубки
6 - рентгеновская трубка
7 - дисплей
8 - травматологическая тележка
10 - детектор
12 - тележка детектора
14 - основание тележки детектора
16 - пол
18 - интересующая область
20 - блок оптической индикации
22 - оптическая индикация
24 - матрица активных датчиков
26 - блок управления
28 - пользовательский интерфейс тележки детектора
29 - кнопка соединения
30 - контроллеры коллиматора
31 - кнопка изменения расстояния до исходного изображения (SID)
32 - блок канала связи
33 - кнопка изменения расстояния до исходного изображения (SID)
34 - чувствительный элемент
36 - пятно индикации
38 - заданное положение пятна
40 - излучение оптической индикации
42 - получение положения
44 - сравнение положений
46 - формирование управляющих сигналов
48 - передача тележке детектора
50 - передача потолочной подвеске
52 - регулирование положения тележки детектора
54 - регулирование потолочной подвески
56 - получение изображения
58 - наложение высокочастотной структуры
Изобретения относятся к медицинской технике, а именно к рентгеновским системам. Система рентгеновской визуализации содержит рентгеновскую трубку, потолочную подвеску для рентгеновской трубки, тележку детектора с установленным на ней рентгеновским детектором, матрицу активных датчиков, блок оптической индикации и блок управления, причем матрица активных датчиков неподвижно прикреплена к потолочной подвеске, блок оптической индикации неподвижно прикреплен к тележке детектора, а блок управления соединен с матрицей активных датчиков. Способ позиционирования рентгеновского детектора содержит этапы, на которых излучают оптическую индикацию из блока оптической индикации на матрицу активных датчиков, получают положение оптической индикации на матрице активных датчиков, сравнивают полученное положение с заданным положением и формируют управляющие сигналы. Использование изобретений позволит улучшить точность позиционирования рентгеновского детектора относительно рентгеновской трубки. 2 н. и 14 з.п. ф-лы, 4 ил.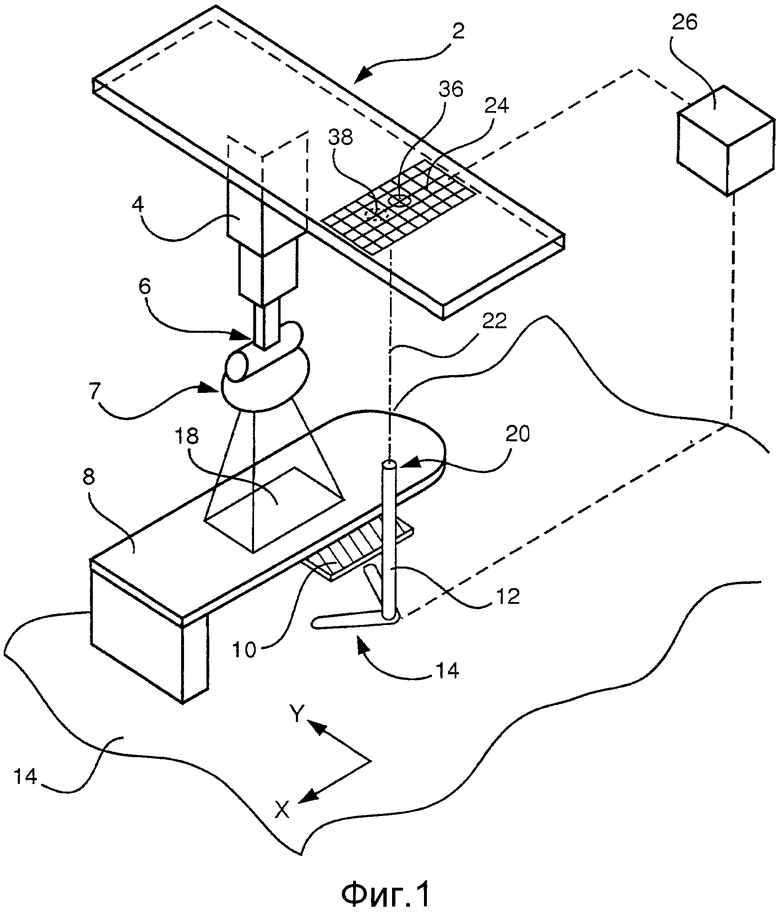
1. Система рентгеновской визуализации, содержащая:
- рентгеновскую трубку (6),
- потолочную подвеску (2) для рентгеновской трубки,
- тележку (12) детектора с установленным на ней рентгеновским детектором (10),
- матрицу (24) активных датчиков,
- блок (20) оптической индикации и
- блок (26) управления,
причем матрица (24) активных датчиков неподвижно прикреплена к потолочной подвеске (2),
причем блок (20) оптической индикации неподвижно прикреплен к тележке (12) детектора и выполнен с возможностью излучения оптической индикации на матрицу (24) активных датчиков,
причем блок (26) управления соединен с матрицей (24) активных датчиков и выполнен с возможностью получения положения оптической индикации на матрице (24) активных датчиков, сравнения полученного положения с заданным положением и формирования управляющих сигналов для управления по меньшей мере одним из потолочной подвески (2) и тележки (12) детектора для регулирования положения оптической индикации в соответствии с заданным положением.
2. Система рентгеновской визуализации по п. 1, в которой матрица (24) активных датчиков содержит область чувствительных элементов (34), которые установлены неподвижно относительно потолка и обнаруживают оптическую индикацию.
3. Система рентгеновской визуализации по п. 2, в которой чувствительные элементы (34) выбраны из группы чувствительных элементов, причем группа содержит:
- матрицу фотодиодов,
- КМОП-матрицу и
- ПЗС-матрицу.
4. Система рентгеновской визуализации по любому из предшествующих пунктов,
в которой тележка (12) детектора имеет основание, выполненное с возможностью горизонтального перемещения по полу (16);
причем рентгеновский детектор (10) неподвижно установлен на тележке (12) детектора;
причем блок (20) оптической индикации выполнен с возможностью испускания луча света перпендикулярно полу (16).
5. Система рентгеновской визуализации по любому из пп. 1, 2 или 3,
в которой блок (20) оптической индикации включает в себя лазер, выполненный с возможностью излучения оптической индикации в виде луча света в невидимом диапазоне частот.
6. Система рентгеновской визуализации по любому из пп. 1, 2 или 3,
в которой рентгеновская трубка (6) интегрирована в корпус, содержащий дисплей (7) для отображения состояния выравнивания рентгеновской трубки (6) и тележки (12) детектора относительно друг друга.
7. Система рентгеновской визуализации по любому из пп. 1, 2 или 3,
в которой тележка (12) детектора содержит блок (32) канала передачи данных для передачи управляющих данных между тележкой (12) детектора и блоком (26) управления.
8. Система рентгеновской визуализации по п. 7,
дополнительно содержащая пользовательский интерфейс (28) тележки детектора, имеющий средство ввода для управления потолочной подвеской (2),
причем пользовательский интерфейс (28) тележки детектора соединен с блоком (32) канала передачи данных.
9. Система рентгеновской визуализации по п. 8,
в которой блок (20) оптической индикации интегрирован в пользовательский интерфейс (28) тележки детектора, причем пользовательский интерфейс (28) неподвижно прикреплен к тележке (12) детектора.
10. Система рентгеновской визуализации по п. 7,
в которой блок (32) канала передачи данных представляет собой беспроводной канал передачи данных.
11. Система рентгеновской визуализации по п. 1,
в которой потолочная подвеска (2) поддерживает кронштейн (4) рентгеновской трубки, удерживающий рентгеновскую трубку (6), и при этом потолочная подвеска (2) включает в себя средство привода для перемещения кронштейна (4) рентгеновской трубки относительно потолочной подвески (2); и
при этом тележка (12) детектора и прикрепленный блок (20) оптической индикации выполнены с возможностью перемещения по полу.
12. Система рентгеновской визуализации по п. 1,
в которой рентгеновский детектор (10) неподвижно установлен на тележке (12) детектора таким образом, что тележка (12) детектора и прикрепленный рентгеновский детектор (10) и прикрепленный блок (20) оптической индикации перемещаются как один блок.
13. Система рентгеновской визуализации по п. 1,
в которой блок (26) управления выполнен с возможностью выравнивания рентгеновской трубки (6) и рентгеновского детектора (10).
14. Способ позиционирования рентгеновского детектора (10), установленного на тележке (12) детектора, относительно рентгеновской трубки (6), подвижно установленной на потолочной подвеске (2), причем тележка (12) детектора выполнена с возможностью перемещения по полу, а способ содержит этапы, на которых:
- излучают (40) оптическую индикацию (22) из блока (20) оптической индикации, неподвижно прикрепленного к подвижной тележке (12) детектора, на матрицу (24) активных датчиков, неподвижно прикрепленную к потолочной подвеске (2),
- получают (42) положение оптической индикации (22) на матрице (24) активных датчиков,
- сравнивают (44) полученное положение с заданным положением и
- формируют (46) управляющие сигналы для управления по меньшей мере одним из потолочной подвески (2) для перемещения рентгеновской трубки (6) относительно потолка и матрицы (24) активных датчиков и тележки (12) детектора по полу, чтобы регулировать положение оптической индикации в соответствии с заданным положением.
15. Способ по п. 14, дополнительно содержащий этап, на котором:
- передают (48) управляющий сигнал к тележке (12) детектора для регулирования (52) положения тележки детектора.
16. Способ по п. 14, дополнительно содержащий этап, на котором:
- передают (50) управляющий сигнал к потолочной подвеске для управления средством привода для регулирования положения рентгеновской трубки (6) относительно потолочной подвески.
| US 2005058256 A1, 17.03.2005 | |||
| US 2003194056 A1, 16.10.2003 | |||
| US 2010215152 A1, 26.08.2010 | |||
| ЛАЗЕРНАЯ СИСТЕМА МЯГКОЙ СТЫКОВКИ ДЛЯ СИСТЕМЫ МЕДИЦИНСКОЙ ЛУЧЕВОЙ ТЕРАПИИ | 1999 |
|
RU2230492C2 |

