Изобретение относится к области авиационной техники, а именно к беспилотным летательным комплексам авианаблюдения, и может быть использовано для дистанционного видео- и фото- зондирования водной поверхности, мониторинга морских и океанических техногенных и природных объектов, ретрансляции радио- и оптических сигналов, скрытного наблюдения и т.п.
Известен беспилотный летательный комплекс(RU 2232104, В64С 29/02, G01V 9/00, 10.07.2004), содержащий дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображения, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом. Радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами, а сам дистанционно пилотируемый летательный аппарат выполнен в виде автономно пилотируемого летательного микроаппарата и размещен вместе с мобильным комплексом управления и обработки информации в общем, портативном контейнере. Автономно пилотируемый летательный микроаппарат для портативного комплекса авианаблюдений содержит фюзеляж, на котором размещены винтовой движитель, рулевое управление по курсу и тангажу, видеокамера с передатчиком видеоизображения, радиоуправляемая бортовая система обеспечения полета летательного аппарата и бортовая приемопередающая аппаратура. Кроме того, в него введена антенная система, закрепленная на фюзеляже, выполненным с приборным отсеком. В корпусе отсека установлены видеокамера с передатчиком видеоизображения, рулевые машинки, аккумуляторная батарея, приборы радиоуправляемой бортовой системы обеспечения полета летательного аппарата и бортовой приемопередающей аппаратуры. Винтовой движитель выполнен в виде, по меньшей мере, одного винтового блока с редуктором и электродвигателем, подключенным к общей аккумуляторной батарее.
Недостатком данного устройства является то, что для питания электродвигателя винтового движителя используется аккумуляторная батарея, поэтому продолжительность полета ограничена емкостью аккумуляторной батареи. Необходимость зарядки аккумуляторной батареи предполагает прекращение полета и приземление беспилотного летательного аппарата.
Известен беспилотный летательный аппарат(RU 2666493, В64С 27/08, В64С 39/02, 07.09.2018), выбранный в качестве прототипа содержит центральную платформу, на концах осей, вторые концы которых жестко закреплены на ней и ориентированы относительно ее центра, жестко закреплены электродвигатели с воздушными винтами с контролируемой частотой вращения, диаметрально расположенные двигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой (полетным контроллером и контроллерами моторов), мобильным пультом управления и контроля, системой видеонаблюдения и приемником GPS навигации, на, по крайней мере, четырех осях, жестко соединенных с центральной платформой установлены, по крайней мере, восемь электродвигателей с соосными воздушными винтами и жестко закреплены внутри четырех одинаковых колец, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на осях, центральной платформе и между собой, внутренний диаметр колец определяется диаметром применяемых воздушных винтов с учетом относительного зазора, который в паре винт - кольцо составляет от 0,45% до 1,5% от внутреннего диаметра кольца в плоскости установки винта, габаритная высота кольца определена как 60% от его внутреннего диаметра, аэродинамический профиль, который обращен к хвостовой части винта, имеет максимальную относительную кривизну около 4%, а хорда профиля наклонена на угол -7° наружу от вертикальной оси винта, верхний винт сосной пары винтов расположен в самом узком сечении профиля кольца на расстоянии 40% высоты кольца от его носика, измеренной от его верхней точки, расстояние между соосными винтами выбирается из соотношения 0,6-1,6 от ширины лопасти винта в самой его широкой части.
Необходимость зарядки аккумуляторной батареи предполагает прекращение полета и приземления беспилотного летательного аппарата. Отмеченный факт, а именно, ограниченная длительность полета, характеризует основной недостаток прототипа.
Задача изобретения - увеличение продолжительности полета путем использования процесса преобразования энергии волнения водной поверхности в электрическую энергию на борту беспилотного летательного аппарата.
Технический результат достигается тем, что в беспилотном летательном аппарате, содержащем центральную платформу, к боковой поверхности которой жестко своими концами жестко прикреплены радиальные стержни, на других концах радиальных стержней жестко закреплены электродвигатели с воздушными винтами с контролируемой частотой вращения, диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой, системой видеонаблюдения и приемником GPS навигации, электродвигатели с воздушными винтами и жестко закреплены внутри одинаковых колец, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на радиальных стержнях, центральной платформе и между собой, центральная платформа выполнена из двух герметичных отсеков, переборка между отсеками имеет форму кривой поверхности шарового сегмента, вершина которого расположена ниже его основания, на внутренней поверхности кривой поверхности переборки жестко закреплена распределенная электрическая обмотка, выводы которой соединены с аккумуляторной батареей, верхний отсек выполнен в виде полусферы, на вершине которой закреплен сферический шарнир, к пальцу которого жестко прикреплен штырь, на другом конце штыря жестко закреплен постоянный магнит тарельчатой формы, аккумуляторная батарея, маршрутная вычислительная система, система видеонаблюдения, приемник GPS навигации расположены в нижнем отсеке, к внешней поверхности основания нижнего отсека жестко прикреплены штоки амортизаторов, нижние торцы которых жестко закреплены на к поплавку, к периферийной части верхней поверхности своими концами жестоко прикреплена дуга, к средней точке дуги прикреплен своим концом шток, проходящий через отверстие, выполненное в верхней части корпуса верхнего отсека, в отверстии установлено манжетное уплотнение, противоположный конец штока прикреплен внешней поверхности сферического шарнира, на нижней поверхности поплавка жестко закреплен датчик касания поверхности воды, соединенный с маршрутной вычислительной системой.
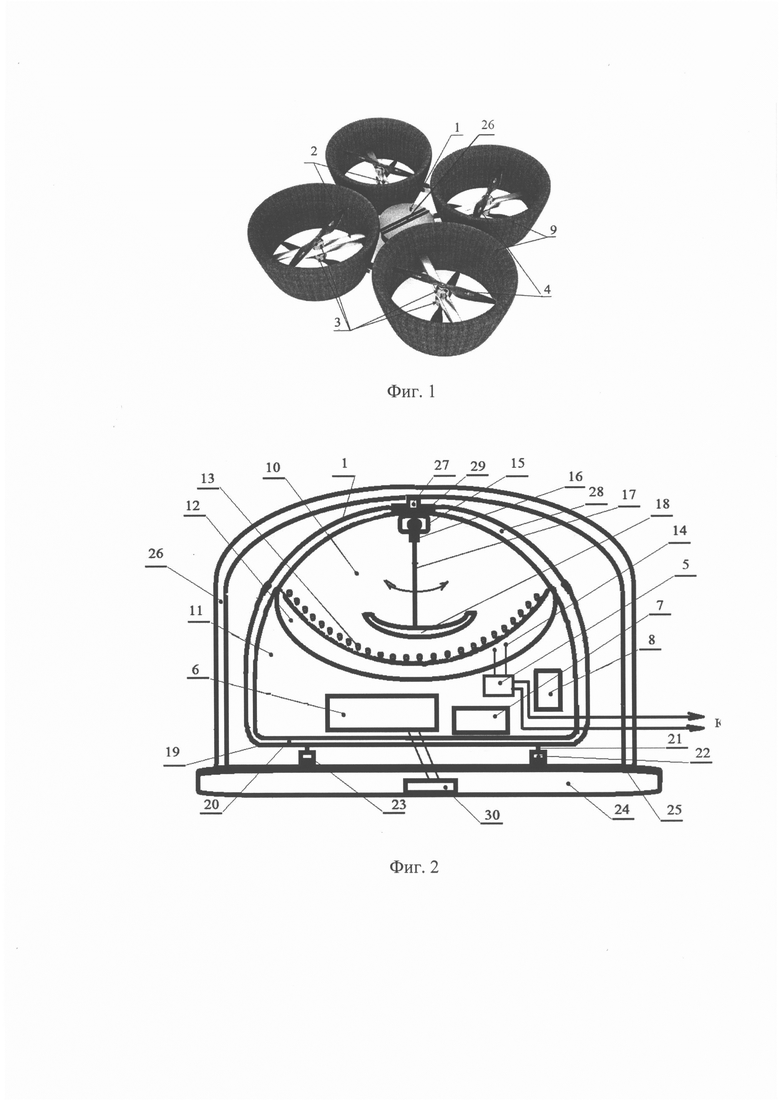
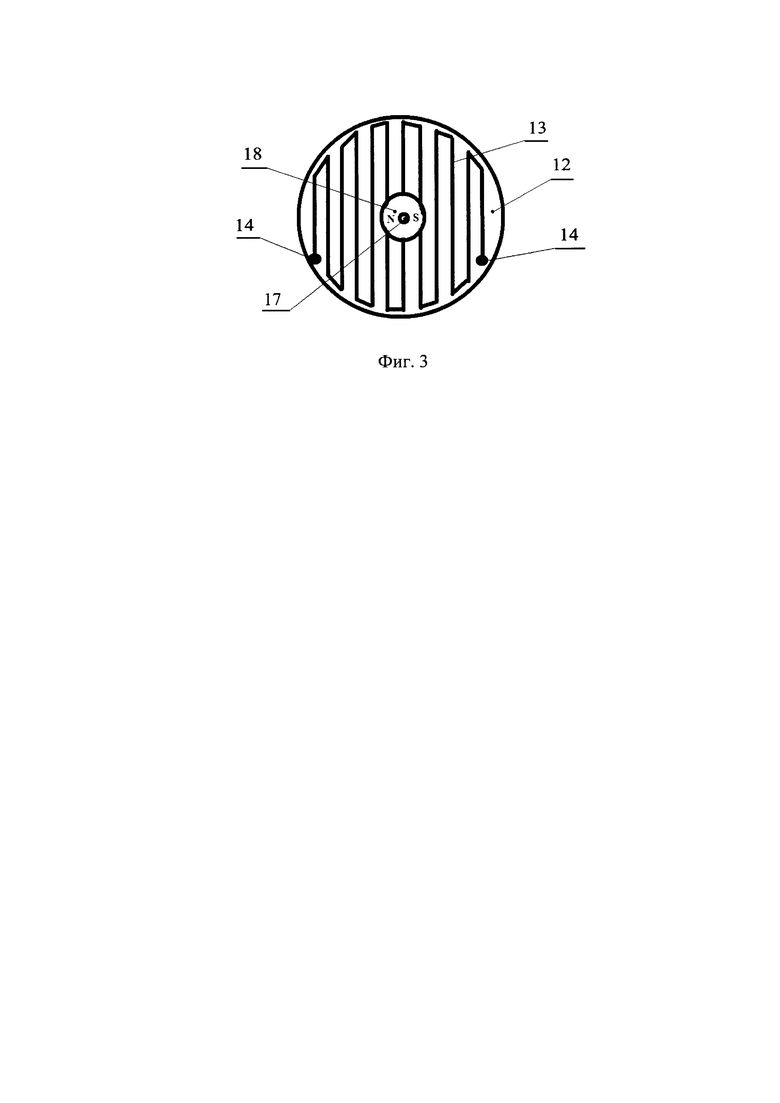
Беспилотный летательный аппарат поясняется чертежами, где на фиг. 1 показан общий вид беспилотного летательного аппарата, на фиг. 2 - вид сбоку центральной платформы, а на фиг. 3 приведен вид сверху на переборку между отсеками.
Беспилотный летательный аппарат содержит центральную платформу 1, к боковой поверхности которой жестко своими концами прикреплены радиальные стержни 2, на других концах радиальных стержней 2 жестко закреплены электродвигатели 3, например, AXI 2814/22, 037 или RacerstarRacingEdition 2306 2700KV или Readytosky 2205-2300 2300KV или RacerstarRacingEdition 2205 2300KV с воздушными винтами 4 с контролируемой частотой вращения. На фиг. 1 показан случай с четырьмя электродвигателями 3. Диаметрально расположенные электродвигатели 3 имеют встречное направление вращения. Электродвигатели 3 связаны с аккумуляторной батареей 5 (фиг. 2), например, LiPo 4S1300 mAh или 1500 mAh, и маршрутной вычислительной системой 6, состоящей из полетного контроллера и контроллеров электродвигателей 3, системой видеонаблюдения 7 и приемником GPS навигации 8. Электродвигатели 3 (фиг. 1) с воздушными винтами 4 и жестко закреплены внутри одинаковых колец 9, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на радиальных стержнях 2 центральной платформы 1 и между собой.
Центральная платформа 1 (фиг. 2) выполнена из двух герметичных отсеков 10 и 11, переборка 12 между отсеками 10 и 11 имеет форму кривой поверхности шарового сегмента и выполнена из феррромагнитного материала. Вершина шарового сегмента расположена ниже его основания. На внутренней поверхности кривой поверхности переборки 12 жестко закреплена распределенная электрическая обмотка 13 (фиг.3), выводы 14 которой соединены с аккумуляторной батареей 5 (фиг. 2). Верхний отсек 10 выполнен в виде полусферы, на вершине которой закреплен сферический шарнир 15, к пальцу 16 которого жестко прикреплен штырь 17, на другом конце штыря 17 жестко закреплен постоянный магнит 18 тарельчатой формы. Аккумуляторная батарея 5, маршрутная вычислительная система 6, система видеонаблюдения 7, приемник GPS навигации 8 расположены в нижнем отсеке ILK внешней поверхности 19 основания 20 нижнего отсека 11 жестко прикреплены штоки 21 амортизаторов 22, нижние торцы 23 которых жестко закреплены к поплавку 24. К периферийной части верхней поверхности 25 поплавка 24 своими концами жестоко прикреплена дуга 26. К средней точке дуги 26 прикреплен своим концом шток 27, проходящий через отверстие, выполненное в верхней части корпуса 28 верхнего отсека 10, в отверстии установлено манжетное уплотнение 29. Противоположный конец штока 27 прикреплен внешней поверхности сферического шарнира 15. На нижней поверхности поплавка 24 жестко закреплен датчик касания поверхности воды 30, например, емкостного типа, соединенный с маршрутной вычислительной системой 6.
Беспилотный летательный аппарат работает следующим образом. На электродвигатели 3 подается питание с аккумуляторной батареи 5, воздушные винты 4 начинают вращаться, и беспилотный летательный аппарат начинает полет, управление которым осуществляется с помощью маршрутной вычислительной системы 6, системы видеонаблюдения 7 и приемником GPS навигации 8.
Длина штыря 17 выбирается такой, чтобы в состоянии полета беспилотного летательного аппарата постоянный магнит 18 касался поверхности переборки 12. Так как она выполнена из ферромагнитного материала между постоянным магнитом 18 и переборкой 12 возникает сила притяжения, которая фиксирует положение постоянного магнита 18, тем самым во время маневров беспилотного летательного аппарата не нарушается его центровка.
Когда аккумуляторная батарея 5 разряжается ниже определенного уровня, беспилотный летательный аппарат совершает посадку на водную поверхность. На поверхности воды беспилотный летательный аппарат удерживается с помощью поплавка 24. Под действием силы тяжести центральной платформы 1 штоки 21 амортизаторов 22 входят во внутренние полости амортизаторов 22. Одновременно с этим корпус 28 центральной платформы 1 смещается вниз относительно верхней части дуги 26. Из-за жесткого соединения дуги 26, штока 27, сферического шарнира 15, штыря 28 и постоянного магнита 18, постоянный магнит 18 приподнимается над распределенной электрической обмоткой 13 и под действием волнения водной поверхности начинает совершать колебательные движения относительно распределенной электрической обмотки 13. Движущееся магнитное поле, созданное постоянным магнитом 18, индуцирует электродвижущую силу в распределенной электрической обмотке 13, в результате в цепи, состоящей из в распределенной электрической обмотки 13 и аккумуляторной батареи 5, начинает протекать ток. Таким образом, осуществляется заряд аккумуляторной батареи 5.
Как можно видеть, возможность заряда аккумуляторной батареи 5 за счет энергии волнения водной поверхности обуславливает увеличение продолжительности полета беспилотного летательного аппарата по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат | 2023 |
|
RU2806131C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| Беспилотный летательный комплекс | 2023 |
|
RU2816399C1 |
| СПАСАТЕЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2752769C1 |
| Беспилотный летательный аппарат | 2017 |
|
RU2666493C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
Беспилотный летательный аппарат содержит центральную платформу, электродвигатели с воздушными винтами, закрепленные определенным образом. Центральная платформа содержит два герметичных отсека в виде верхней и нижней полусфер, разделенных переборкой, выполненной в виде кривой поверхности шарового сегмента из ферромагнитного материала. На внутренней поверхности переборки жестко закреплена распределенная электрическая обмотка, выводы которой соединены с аккумуляторной батареей. Верхняя полусфера содержит штырь, подвижно закрепленный к ее вершине с помощью сферического шарнира. К другому концу штока присоединен постоянный магнит тарельчатой формы. Нижняя полусфера содержит аккумуляторную батарею, маршрутную вычислительную систему, систему видеонаблюдения, приемник GPS навигации, расположенные на внутренней стороне ее нижней поверхности. К внешней поверхности основания нижней полусферы закреплен поплавок с помощью амортизаторов и штоков. К поплавку присоединена дуга, огибающая обе полусферы и имеющая соединение со штырем через отверстие в вершине верхней полусферы и манжетное уплотнение. На нижней поверхности поплавка жестко закреплен датчик касания поверхности воды, соединенный с маршрутной вычислительной системой. Обеспечивается увеличение продолжительности полета за счет заряда аккумуляторной батареи с помощью энергии волнения водной поверхности. 3 ил.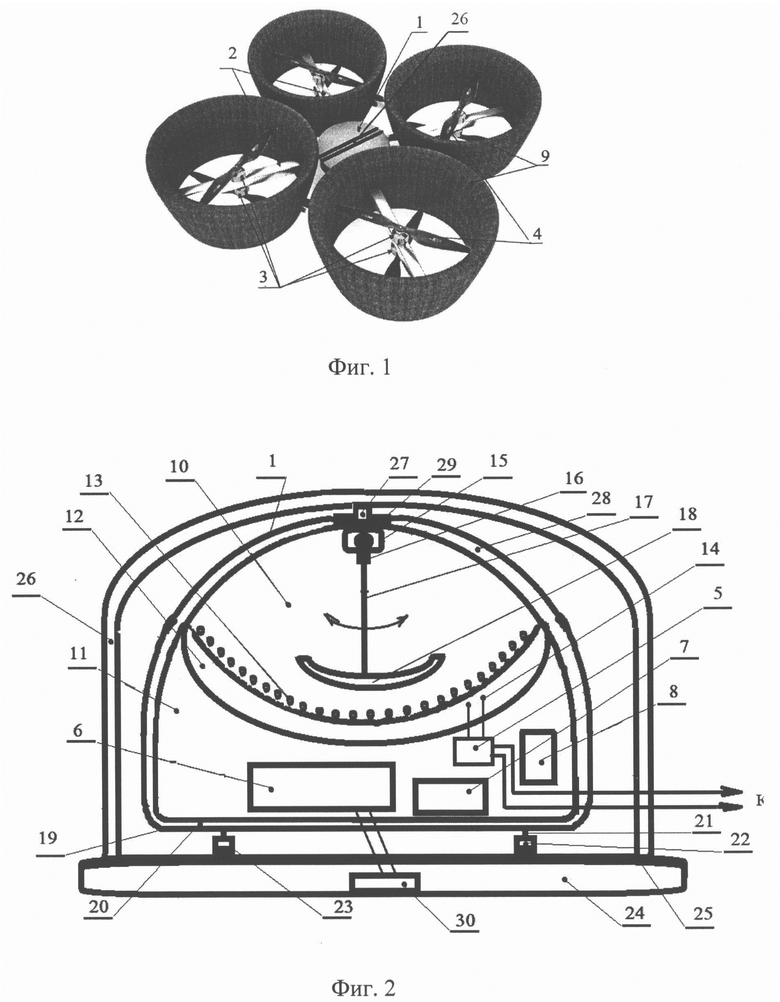
Беспилотный летательный аппарат, содержащий центральную платформу, к боковой поверхности которой жестко своими концами прикреплены радиальные стержни, на других концах радиальных стержней жестко закреплены электродвигатели с воздушными винтами с контролируемой частотой вращения, диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой, системой видеонаблюдения и приемником GPS навигации, электродвигатели с воздушными винтами жестко закреплены внутри одинаковых колец, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на радиальных стержнях, центральной платформе и между собой, отличающийся тем, что центральная платформа выполнена из двух герметичных отсеков, переборка между отсеками имеет форму кривой поверхности шарового сегмента, вершина которого расположена ниже его основания, на внутренней поверхности кривой поверхности переборки жестко закреплена распределенная электрическая обмотка, выводы которой соединены с аккумуляторной батареей, верхний отсек выполнен в виде полусферы, на вершине которой закреплен сферический шарнир, к пальцу которого жестко прикреплен штырь, на другом конце штыря жестко закреплен постоянный магнит тарельчатой формы, аккумуляторная батарея, маршрутная вычислительная система, система видеонаблюдения, приемник GPS навигации расположены в нижнем отсеке, к внешней поверхности основания нижнего отсека жестко прикреплены штоки амортизаторов, нижние торцы которых жестко закреплены на поплавке, к периферийной части верхней поверхности своими концами жестоко прикреплена дуга, к средней точке дуги прикреплен своим концом шток, проходящий через отверстие, выполненное в верхней части корпуса верхнего отсека, в отверстии установлено манжетное уплотнение, противоположный конец штока прикреплен к внешней поверхности сферического шарнира, на нижней поверхности поплавка жестко закреплен датчик касания поверхности воды, соединенный с маршрутной вычислительной системой.
| Гибридная мультироторная летающая платформа | 2019 |
|
RU2710968C1 |
| CN 109098920 A, 28.12.2018 | |||
| САМОУСТАНАВЛИВАЮЩАЯСЯ ДВУХКОНСОЛЬНАЯ ФЕРМА ДЛЯ ДОЖДЕВАЛЬНЫХ, ОПРЫСКИВАТЕЛЬНЫХ и т. п. МАШИН | 0 |
|
SU212660A1 |
| ПРИСПОСОБЛЕНИЕ К КОЛЬЦЕВОЙ ВАЛЯЛЬНОЙ МАШИНЕ | 1966 |
|
SU216957A1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНЫХ ЭЛЕКТРОУСТАНОВОК | 2022 |
|
RU2791914C1 |
| 0 |
|
SU158924A1 | |
