Изобретение относится к авиационной технике и может быть использовано в бортовой пассивной РЛС и автоматической системе управления самолета.
Известен способ формирования маршрута носителя пеленгатора, определяющего местоположение излучателя методом триангуляции (патент №2303794, G01S 5/02, приоритет 17.08.2005), взятый в качестве прототипа. Сущность прототипа заключается в том, что в начальной точке маршрута на носителе пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем при перемещении носителя пеленгатора из начальной точки по прямой под углом 35°16' относительно направления на излучатель непрерывно измеряют пеленгатором пеленг излучателя, при этом пройденное носителем расстояние измеряют автономной навигационной системой носителя, в момент, когда угол между направлением движения носителя пеленгатора и направлением на излучатель станет равным 180°-35°16'=144°44', производят вычисление местоположения излучателя триангуляционном методом, при этом отрезок между начальной точкой движения носителя и точкой, когда направление на излучатель равно 144°44', является формируемым маршрутом носителя пеленгатора (фиг.1).
Недостатком указанного способа является невозможность его использования в условиях ограниченного времени перемещения носителя пеленгатора из начальной точки маршрута в конечную точку.
Техническим результатом предлагаемого способа является определение местоположения источника излучения с максимальной точностью за отведенное время.
Сущность предлагаемого способа формирования маршрута носителя пеленгатора, определяющего дальность до неподвижного излучателя, заключается в том, что в способе, при котором в начальной точке маршрута на носителе пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем носитель пеленгатора перемещается из начальной точки под углом θопт относительно направления на излучатель, где θопт есть решение выражения DR(T,θ)→min, где DR(T,θ) - дисперсия ошибки определения дальности до излучателя в момент Т, где Т - время, отведенное на определение дальности, θ - угол между вектором путевой скорости и направлением на излучатель, при этом в процессе движения носителя непрерывно измеряется пеленгатором пеленг излучателя, пройденное носителем расстояние измеряется автономной навигационной системой носителя, кроме этого, в момент, когда время движения носителя пеленгатора t будет равно отведенному времени Т, по совокупности полученных измерений пеленга излучателя и координат носителя определяется дальность до цели, при этом путь от начальной точки движения носителя до точки, когда t=T, является формируемым маршрутом носителя пеленгатора.
Сущность изобретения поясняется следующим. Носитель пеленгатора движется с постоянным бортовым пеленгом излучателя 9, который отсчитывается относительно направления путевой скорости V (фиг.2). При таком движении носитель описывает логарифмическую спираль. Максимальная скорость носителя ограничивается его техническими характеристиками, поэтому считаем путевую скорость V фиксированной. На носителе с помощью пеленгатора непрерывно измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, при этом собственные координаты носителя измеряют автономной навигационной системой носителя. По совокупности полученных измерений пеленга излучателя и координат носителя одним из известных способов по истечению времени Т, отведенного на измерение дальности, получают оценку дальности излучателя относительно носителя. По известному местоположению носителя, измеренным пеленгу излучателя и дальности до него становится известным местоположение излучателя на плоскости.
Из-за погрешностей пеленгатора возможно неточное определение дальности до излучателя. Любой использованный при этом способ оценки дальности можно охарактеризовать дисперсией ошибки оценивания дальности DR. Известно, что DR зависит от многих параметров, в том числе от маршрута носителя. В данном случае маршрут носителя (логарифмическая спираль) задается одним параметром - постоянным бортовым пеленгом излучателя θ (БПИ). Считаем, что все параметры, влияющие на дисперсию, кроме θ, известны. Тогда для достижения наилучшей точности оценивания дальности за фиксированное время Т требуется найти такой оптимальный БПИ θ=θопт, который доставляет минимум функции DR(T,θ).
Существование минимума функции DR(T,θ) доказывается следующим образом. БПИ (θ) может принимать значения в интервале [0°, 360°]. Вид функции DR(T,θ) симметричен относительно значения θ=180°. Поэтому рассмотрим поведение DR (T,θ) в интервале [0°,180°]. При θ=0° логарифмическая спираль вырождается в отрезок, лежащий вдоль направления на излучатель. Известно, что при движении вдоль этого направления дальность измерить невозможно, то есть DR(T,0°)→∞. При θ=180° логарифмическая спираль вырождается в луч, направленный от излучателя. При движении в этом направлении дальность измерить также невозможно, то есть DR (T,180°)→∞. Вместе с тем известно, что при 0°<θ<180° дисперсия имеет конечное значение. Следовательно, в интервале [0°, 180°] существует минимум функции DR(T,θ).
Конкретные способы оценивания дальности до излучателя и способ нахождения минимума функции DR(T,θ) изложены в статье Гладкова В.Е. и Пономарева А.В. «Оптимизация маршрута летательного аппарата-носителя пеленгационного устройства, определяющего местоположение цели по ее угловым координатам». Радиотехника, №11, 2006, с.16-18.
Новизна предложенного способа состоит в том, что наилучшая точность определения местоположения излучателя достигается за время, не превышающее отведенное. Отличие от прототипа заключается в том, что носитель пеленгатора перемещается не по прямой, а по логарифмической спирали с постоянным углом относительно направления на излучатель, величина которого вычисляется описанным выше способом.
Таким образом, предложенный способ позволяет сформировать маршрут носителя пеленгатора, определяющего местоположение неподвижного излучателя, при котором наилучшая точность достигается за отведенное время. Этот способ полезен для решения задачи радиотехнической разведки над территорией противника, когда время движения ограничивается заданной вероятностью уничтожения носителя пеленгатора, а так же способ полезен для проведения спасательных операций, когда время ограничивается жизненным фактором.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ НЕПОДВИЖНОГО ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2373549C1 |
| Способ формирования маршрута носителя пеленгатора | 2016 |
|
RU2617127C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ ИЗЛУЧАТЕЛЯ МЕТОДОМ ТРИАНГУЛЯЦИИ | 2005 |
|
RU2303794C2 |
| СПОСОБ ТРИАНГУЛЯЦИИ ЦЕЛЕЙ | 2010 |
|
RU2423720C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2695642C1 |
В заявленном изобретении решается задача определения местоположения излучателя относительно носителя. Для этого в начальной точке маршрута на носителе пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем носитель пеленгатора перемещается из начальной точки под углом θопт относительно направления на излучатель, где θопт есть решение выражения DR(T,θ)→min, где DR(T,θ) - дисперсия ошибки определения дальности до излучателя в момент Т, где Т - время, отведенное на определение дальности, θ - угол между вектором путевой скорости и направлением на излучатель, при этом в процессе движения носителя непрерывно измеряется пеленгатором пеленг излучателя, пройденное носителем расстояние измеряется автономной навигационной системой носителя, кроме этого, в момент, когда время движения носителя пеленгатора t будет равно отведенному времени Т, по совокупности полученных измерений пеленга излучателя и координат носителя определяется дальность до цели, при этом путь от начальной точки движения носителя до точки, когда t=T, является формируемым маршрутом носителя пеленгатора. Достигаемым техническим результатом является повышение точности определения местоположения источника излучения за отведенное время. 2 ил.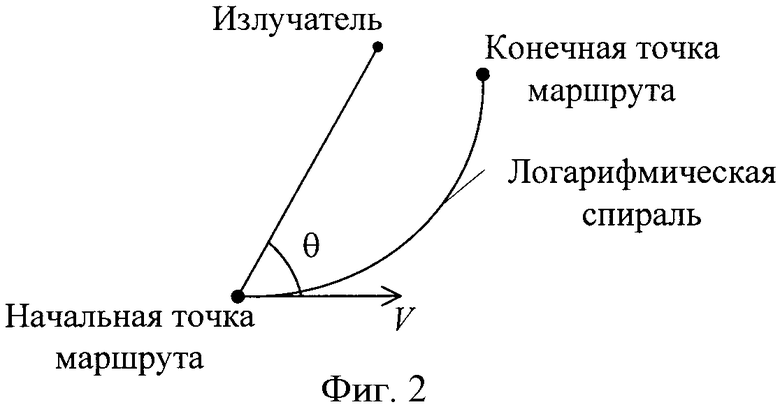
Способ формирования маршрута носителя пеленгатора, определяющего местоположение излучателя, при котором в начальной точке маршрута, на носителе, пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, отличающийся тем, что носитель пеленгатора перемещается из начальной точки под оптимальным углом θопт относительно направления на излучатель, где θопт есть решение выражения DR(T,θ)→min, в котором DR(T,θ) есть дисперсия ошибки определения дальности до излучателя в момент времени Т, отведенного на определение дальности, а θ - угол между вектором путевой скорости и направлением на излучатель, в процессе движения носителя непрерывно измеряют пеленгатором пеленг излучателя, пройденное носителем расстояние измеряют автономной навигационной системой носителя, в момент, когда время движения носителя пеленгатора t будет равно отведенному времени Т, по совокупности полученных измерений пеленга излучателя и координат носителя определяют дальность до цели, при этом путь от начальной точки движения носителя до точки, когда время движения носителя t станет равно отведенному времени на определение дальности Т, является формируемым маршрутом носителя пеленгатора.
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ ИЗЛУЧАТЕЛЯ МЕТОДОМ ТРИАНГУЛЯЦИИ | 2005 |
|
RU2303794C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ РАЗМЕЩЕНИИ АНТЕННОГО УСТРОЙСТВА НА ПОВЕРХНОСТИ ПОДВИЖНОГО НОСИТЕЛЯ (ВАРИАНТЫ), ПЕЛЕНГАТОР РАДИОСИГНАЛОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ РАЗМЕЩЕНИИ АНТЕННОГО УСТРОЙСТВА НА ПОВЕРХНОСТИ ПОДВИЖНОГО НОСИТЕЛЯ (ВАРИАНТЫ) | 2001 |
|
RU2218580C2 |
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
| US 4639733 A, 27.01.1987 | |||
| Устройство для измерения размеров | 1986 |
|
SU1392343A1 |
| WO 9829756 A1, 09.07.1998. | |||

