Настоящее изобретение относится к системам удержания и перемещения длинномерных объектов при изготовлении, строительстве и ремонте.
Известно устройство для перемещения сыпучих и комковых грузов - конвейер с подвесной лентой (см. монографию «Конвейеры с подвесной лентой» под общей редакцией В.И. Аверченкова, В.Н. Ивченко, 2-е издание, стереотипное. Москва: Издательство «ФЛИНТА», 2011), где для поддержания подвесной ленты конвейера используется гибкий элемент с расположенными на нем роликами, свободно вращающимися на гибком элементе.
Данное устройство обладает следующими недостатками: перемещение объектов осуществляется на конвейерной ленте, которая приводится в движение за счет привода, который, как правило, находится у одного из концов конвейера. При такой конструкции перемещение объектов без конвейерной ленты невозможно, а гибкий элемент с роликами, который служит для подвеса конвейерной ленты, только поддерживает конвейерную ленту, на которой расположены перемещаемые объекты, и не может создавать тянущего усилия. В этой конструкции гибкий элемент не вращается, вращаются только ролики, установленные на нем.
Предлагаемое устройство позволяет перемещать объект без конвейерной ленты, располагая его непосредственно на гибком элементе, за счет вращения гибкого элемента посредством привода вращения, передавая перемещаемый объект от одного устройства к другому.
Это достигается тем, что в устройстве для перемещения длинномерных объектов, включающем гибкий элемент, концы которого закреплены на вращающихся опорах, и неподвижные опоры, особенностью является то, что, по меньшей мере, одна вращающаяся опора выполнена с силовым приводом, вращающим гибкий элемент, перемещающий непосредственно расположенный на гибком элементе длинномерный объект, причем концы гибкого элемента закреплены на вращающихся опорах непосредственно или через промежуточные элементы и вращающиеся опоры установлены непосредственно на неподвижных опорах, а на неподвижных опорах установлена траверса, на которой расположены вращающиеся опоры, при этом одна вращающаяся опора выполнена в виде подшипникового узла, при чем силовой привод выбран из ряда: электродвигатель, гидромотор, пневмодвигатель, двигатель внутреннего сгорания, ручной привод, ножной привод и, при необходимости, дополнен редуктором, а промежуточный элемент выполнен с функцией изменения длины, например, гидроцилиндр или электрический тянущий механизм. Гибкий элемент может быть выполнен в виде цепи, троса, гибкого вала, в виде соединенных шарниров и иметь зубья с зацепами или круглую форму в сечении и утолщения в виде тел вращения, а также сферические или цилиндрические утолщения, например, в виде роликов, причем гибкий элемент и/или утолщения на нем покрыты мягким, упругим материалом, например резиной или пластмассой, или изготовлены из этих материалов и материал покрытия имеет фрикционные свойства для уменьшения проскальзывания.
Неподвижные опоры выбраны из ряда: свая, стена, строительные конструкции, природные объекты, обладающие достаточной прочностью и жесткостью, при этом неподвижные опоры выполнены в виде винтовых, и/или шпунтовых, и/или бетонных свай.
Устройство имеет механизм перемещения вращающихся опор относительно траверсы или относительно неподвижных опор и механизм перемещения траверсы относительно неподвижных опор, а также имеет механизм для извлечения гибкого элемента из-под перемещаемого объекта после опускания перемещаемого объекта на основание или грунт.
Имеется система дистанционного управления силовыми приводами одного или нескольких устройств, а также имеется система автоматического управления, к которой подключены силовые приводы одного или нескольких устройств, при этом система автоматического управления имеет дистанционное управление и система автоматического управления подключена к датчикам, например к датчику положения перемещаемого объекта, и/или к датчику положения гибкого элемента, и/или к датчику возникающих нагрузок.
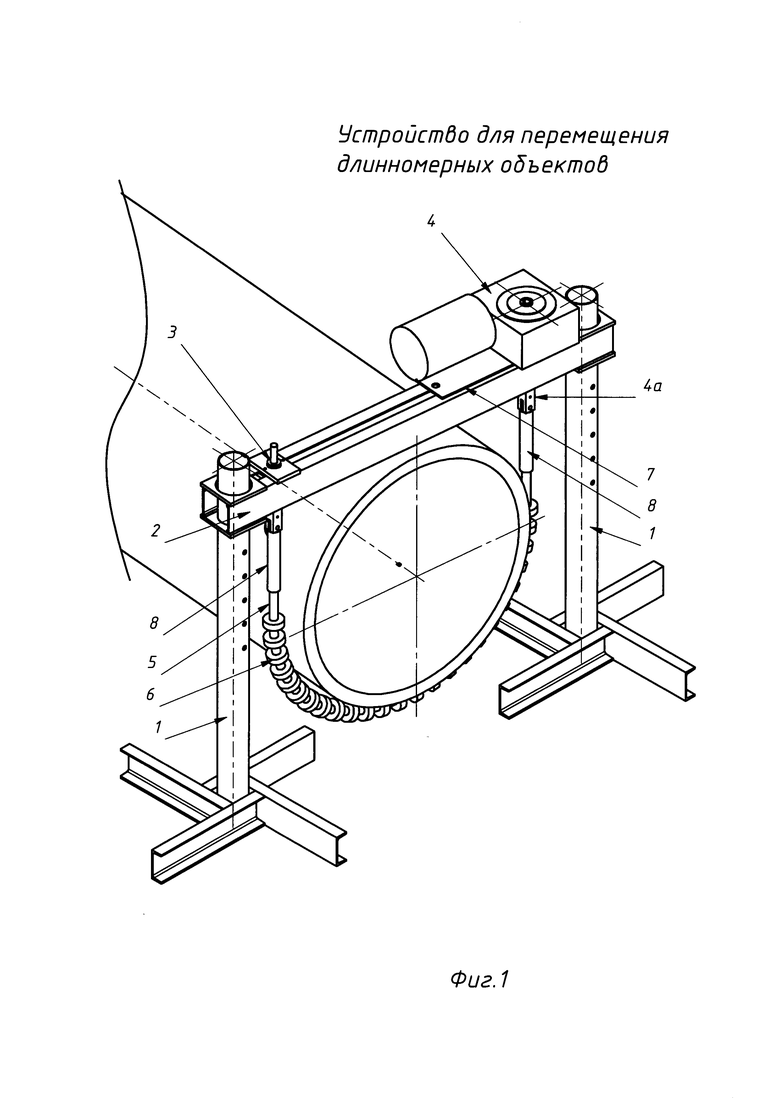
На фиг. 1 изображены устройство для перемещения длинномерных объектов и сам перемещаемый объект (труба).
Устройство, показанное на фиг. 1, состоит из двух опор 1, на которых установлена траверса 2, на которой установлены вращающиеся опоры в виде подшипниковых узлов 3 или силовых приводов 4, к которым прикреплен гибкий элемент 5 с утолщениями/роликами 6, один конец которого закреплен на выходном вале 4а приводного устройства 4, а другой конец гибкого элемента 5 может быть закреплен на подшипниковом узле 3, непосредственно или через промежуточные элементы 8, двух силовых приводов изменения длины гибкого элемента 4, механизмов перемещения 7 вращающихся опор 3 или силовых приводов 4 относительно опор 1, механизма для извлечения гибкого элемента 5 из-под перемещаемого объекта после опускания перемещаемого объекта на основание/землю (на фиг. не показан), системы автоматического управления приводом вращения (на фиг. не показана), системы дистанционного управления приводом вращения (на фиг. не показана).
Устройство работает следующим образом.
По ходу перемещения объекта с шагом менее половины длины перемещаемого объекта устанавливаются попарно опоры 1, например, в грунт вкручиваются винтовые сваи или устанавливаются опоры 1 на твердую ровную поверхность, как показано на фиг. 1. Если длина объекта большая, расстояние между парами опор 1 определяется по соответствующим нормативным документам, для исключения возникновения критических напряжений и/или деформаций для перемещаемого объекта.
На каждую пару опор 1 устанавливается траверса 2 со всеми установленными на них силовыми приводами 4 и механизмами 7. Гибкий элемент 5 может быть закреплен заранее к выходным валам 4а или закрепляется на них после установки траверсы 2. Причем на траверсе 2 должен быть установлен как минимум один силовой привод вращения 4, к выходному валу 4а которого присоединяется один из концов гибкого элемента 5. Силовой привод вращения 4 может быть установлен на траверсе 2, на опорах 1 или рядом с ними, например, при большой массе привода удобнее установить его на грунт. В зависимости от условий эксплуатации в качестве силового привода вращения 4 могут использоваться любые устройства, создающие вращающий момент, например, электродвигатели, пневмодвигатели, двигатели внутреннего сгорания или ручного/ножного привода. Для вращения гибкого элемента 5 вид привода вращения не имеет существенного значения, он отличается только типом потребляемой энергии, в зависимости от условий эксплуатации выбирается наиболее подходящий вид привода. Гибкий элемент 5 может соединяться с вращающимися опорами 3 или с силовыми приводами 4 непосредственно или через промежуточные элементы 8. Промежуточный элемент 8 может быть выполнен с функцией изменения длины, например, гидроцилиндр или электрический тянущий механизм.
Для повышения усилия перемещения (см. фиг. 1) применяются два силовых привода 4 и оба конца гибкого элемента 5 закреплены на их выходных валах 4а, вращающаяся опора 3 в виде подшипникового узла в этом случае не используется.
На гибкие элементы 5, висящие между опорами 1, а если гибкий элемент 5 выполнен с роликами 6, то на ролики, установленные на гибком элементе, укладывается перемещаемый объект. При включении привода вращения 4 начинает вращаться гибкий элемент 5, являющийся по сути гибким валом. Вращение гибкого элемента 5 вызывает поступательное движение перемещаемого объекта в его осевом направлении.
При перемещении на определенную длину объект может начать изгибаться под силой тяжести вниз, чтобы прогиб не превышал заданную величину, на расчетном расстоянии по ходу перемещения устанавливаются аналогичные устройства для поддержки и/или перемещения объекта. Для управления работой одного или нескольких устройств, в частности синхронизации работы нескольких устройств, предусматривается установка одной или нескольких систем автоматического и/или дистанционного управления приводами вращения.
Для вращения перемещаемого объекта вокруг своей оси достаточно при увеличении длины одного из концов гибкого элемента 5 синхронно уменьшать длину другого.
Для извлечения гибкого элемента 5 из-под перемещаемого объекта после опускания перемещаемого объекта на основание/землю надо отсоединить один конец гибкого элемента от точки крепления 4а и потянуть за другой конец гибкого элемента 5. Для облегчения этого действия достаточно сделать небольшое углубление в основании/земле под гибким элементом 5 или положить объект на дополнительные упоры.
В зависимости от стоящих задач и вида перемещаемых объектов гибкий элемент 5 может быть выполнен в виде цепи, троса, гибкого вала или соединенных шарниров. Для лучшего зацепления с объектом цепь может иметь зубья с зацепами или иметь звенья круглой формы в сечении, покрытые эластичным материалом.
На гибком элементе 5 могут быть выполнены утолщения 6 в виде роликов или установлены колеса, и/или втулки, и/или цилиндры, и/или барабаны. В зависимости от условий эксплуатации и перемещаемого объекта они могут иметь различное расположение и/или чередование по длине гибкого элемента 5. Они могут быть покрыты резиной или пластмассой или изготовлены из этих материалов. Применение любого из вышеперечисленных элементов решает одну и ту же задачу преобразовать вращательное движение гибкого элемента 5 в поступательное движение перемещаемого объекта. Причем полученное при использовании роликов увеличение наружного диаметра по сравнению с диаметром (сечением) самого гибкого элемента приведет к увеличению скорости перемещения и уменьшению контактных напряжений в зонах контакта с перемещаемым объектом. Несмотря на различные названия, все вышеперечисленные элементы, в предлагаемом случае применения, являются одним и тем же, по сути, конструктивным элементом и выполняют одну и ту же функцию ведущего колеса.
На траверсе 2 устанавливаются силовые приводы 4 для вращения гибкого элемента 5 и для перемещения его в вертикальной плоскости, которые могут быть выполнены в виде передачи винт-гайка. При больших диапазонах вертикального перемещения устанавливаются силовые приводы для выборки гибкого элемента 5, например, по принципу якорной цепи. В некоторых случаях эти механизмы объединяются в единое целое, с единым приводом, т.к. не всегда требуется совмещать два движения: осевое перемещение с вертикальным, а тем более с поворотом.
При необходимости сдвига объекта в радиальном направлении устанавливаются механизмы 7 перемещения вращающихся опор относительно траверсы или относительно самих опор.
При необходимости большого, например, вертикального перемещения устанавливается механизм перемещения траверсы относительно опор.
Для повышения безопасности работ используется дистанционное управление, а при большом количестве устройств и/или сложных синхронных перемещениях применяется система автоматического управления.
По предлагаемому техническому решению была изготовлена экспериментальная установка, которая прошла успешные испытания со стальной трубой диаметром 800 мм, длинной 12 метров, толщиной стенки 16 мм и массой более 3,5 тонн.
Предложенное устройство обеспечивает существенное сокращение затрат и времени, затрачиваемого на перемещение длинномерных объектов, а также уменьшает воздействие нездоровых и/или опасных условий на персонал.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2007 |
|
RU2348529C1 |
| Установка для резки проката | 1980 |
|
SU946824A1 |
| Устройство для волочения | 1983 |
|
SU1068197A1 |
| Устройство для подачи и наложения полосового материала на сборочный барабан | 1990 |
|
SU1752574A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ДЛИННОМЕРНЫХ ПРОФИЛЕЙ | 2003 |
|
RU2236320C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2715120C1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Устройство для перемещения и фиксации трубопровода при строительстве и ремонте | 2016 |
|
RU2660728C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКИХ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2012 |
|
RU2494361C1 |
Настоящее изобретение относится к системам удержания и перемещения длинномерных объектов при изготовлении, строительстве и ремонте. Устройство для перемещения длинномерных объектов включает гибкий элемент и опоры, на которых закреплены его концы. Отличие состоит в том, что перемещаемый объект расположен на гибком элементе, который выполнен с возможностью вращения с помощью силового привода. Концы гибкого элемента закреплены на вращающихся опорах непосредственно или через промежуточные элементы. Изобретение обеспечивает существенное сокращение затрат и времени на перемещение длинномерных объектов, а также уменьшает воздействие нездоровых и/или опасных условий на персонал. 24 з.п. ф-лы, 1 ил.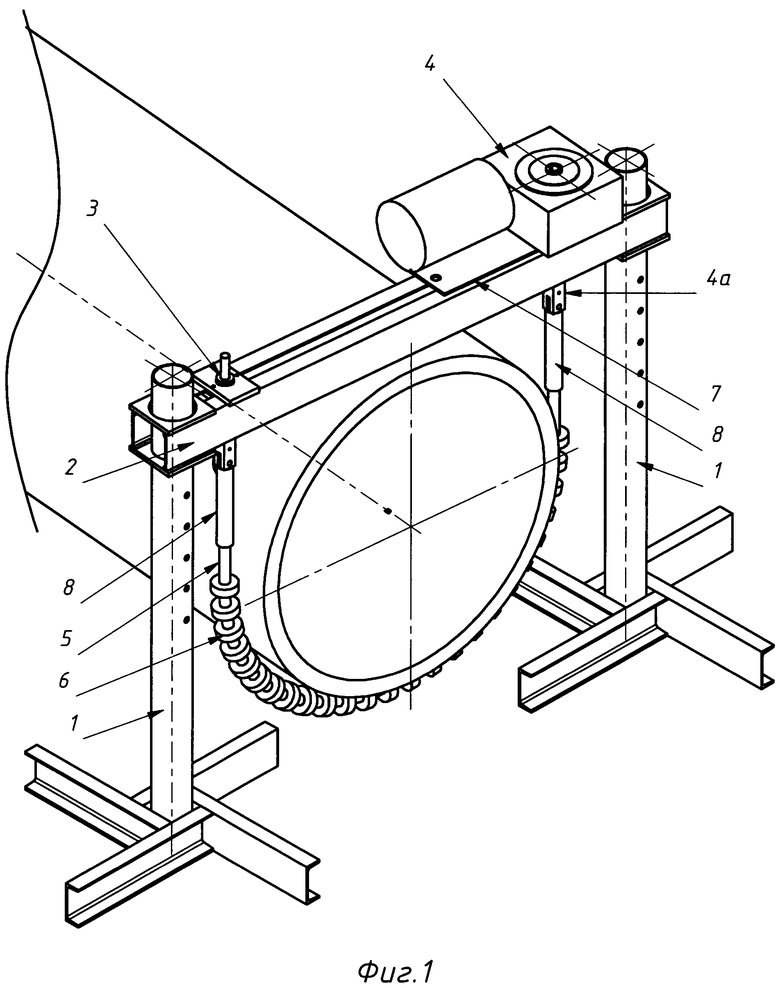
1. Устройство для перемещения длинномерных объектов, включающее гибкий элемент, концы которого закреплены на вращающихся опорах, и неподвижные опоры, отличающееся тем, что по меньшей мере, одна вращающаяся опора выполнена с силовым приводом, вращающим гибкий элемент, перемещающий непосредственно расположенный на гибком элементе длинномерный объект, причем концы гибкого элемента закреплены на вращающихся опорах непосредственно или через промежуточные элементы.
2. Устройство по п. 1, отличающееся тем, что вращающиеся опоры установлены непосредственно на неподвижных опорах.
3. Устройство по п. 1, отличающееся тем, что на неподвижных опорах установлена траверса, на которой расположены вращающиеся опоры.
4. Устройство по п. 1, отличающееся тем, что одна вращающаяся опора выполнена в виде подшипникового узла.
5. Устройство по п. 1, отличающееся тем, что силовой привод выбран из ряда: электродвигатель, гидромотор, пневмодвигатель, двигатель внутреннего сгорания, ручной привод, ножной привод и, при необходимости, дополнен редуктором.
6. Устройство по п. 1, отличающееся тем, что промежуточный элемент выполнен с функцией изменения длины, например гидроцилиндр или электрический тянущий механизм.
7. Устройство по п. 1, отличающееся тем, что гибкий элемент выполнен в виде цепи.
8. Устройство по п. 1, отличающееся тем, что гибкий элемент выполнен в виде троса.
9. Устройство по п. 1, отличающееся тем, что гибкий элемент выполнен в виде гибкого вала.
10. Устройство по п. 1, отличающееся тем, что гибкий элемент выполнен в виде соединенных шарниров.
11. Устройство по п. 1, отличающееся тем, что гибкий элемент имеет зубья с зацепами.
12. Устройство по п. 1, отличающееся тем, что гибкий элемент имеет круглую форму в сечении.
13. Устройство по п. 1, отличающееся тем, что гибкий элемент имеет утолщения в виде тел вращения.
14. Устройство по п. 1, отличающееся тем, что гибкий элемент имеет сферические или цилиндрические утолщения, например, в виде роликов.
15. Устройство по п. 14, отличающееся тем, что гибкий элемент и/или утолщения на нем покрыты мягким, упругим материалом, например резиной или пластмассой, или изготовлены из этих материалов.
16. Устройство по п. 15, отличающееся тем, что материал покрытия имеет фрикционные свойства для уменьшения проскальзывания.
17. Устройство по п. 1, отличающееся тем, что неподвижные опоры выбраны из ряда: свая, стена, строительные конструкции, природные объекты, обладающие достаточной прочностью и жесткостью.
18. Устройство по п. 1, отличающееся тем, что неподвижные опоры выполнены в виде винтовых, и/или шпунтовых, и/или бетонных свай.
19. Устройство по п. 3, отличающееся тем, что имеет механизм перемещения вращающихся опор относительно траверсы или относительно неподвижных опор.
20. Устройство по п. 3, отличающееся тем, что имеет механизм перемещения траверсы относительно неподвижных опор.
21. Устройство по п. 1, отличающееся тем, что имеет механизм для извлечения гибкого элемента из-под перемещаемого объекта после опускания перемещаемого объекта на основание или грунт.
22. Устройство по п. 1, отличающееся тем, что имеет систему дистанционного управления силовыми приводами одного или нескольких устройств.
23. Устройство по п. 1, отличающееся тем, что имеет систему автоматического управления, к которой подключены силовые приводы одного или нескольких устройств.
24. Устройство по п. 23, отличающееся тем, что система автоматического управления имеет дистанционное управление.
25. Устройство по п. 23, отличающееся тем, что система автоматического управления подключена к датчикам, например к датчику положения перемещаемого объекта, и/или к датчику положения гибкого элемента, и/или к датчику возникающих нагрузок.
| Гибкая роликоопора для ленточного конвейера | 1959 |
|
SU128787A1 |
| СПОСОБ ОБЕСФОСФОРИВАНИЯ РАСПЛАВЛЕННОГО ЖЕЛЕЗА И РАФИНИРУЮЩАЯ ДОБАВКА | 2017 |
|
RU2735536C1 |
| Гибкая опора для ленточного конвейера | 1958 |
|
SU119131A1 |
| Устройство для дистанционного автоматизированного управления шахтными конвейерными линиями | 1986 |
|
SU1579863A1 |
| Устройство для перемещения крупногабаритных изделий | 1987 |
|
SU1481160A1 |
| US 3068995 A1, 18.12.1962 | |||
| US 2895594 А, 21.07.1959 | |||
| US 20050167248 A1, 04.08.2005. | |||

