1 . 1
Изобретение относится к машиностроению, а именно к автооператорам которыми оснащены металлообрабатывающие станки с числовым программным управлением, и может быть использовано при создании автоматических линий обработки многономенклатурных деталей, а также в приборостроении, на транспорте и в других отраслях народного хозяйства.
Цель изобретения - расширение тенологических возможностей путем увеличения зоны обслуживания и увеличения степеней подвижности автооператора без введения дополнительных приводов и при уменьшении занимаемой площади.
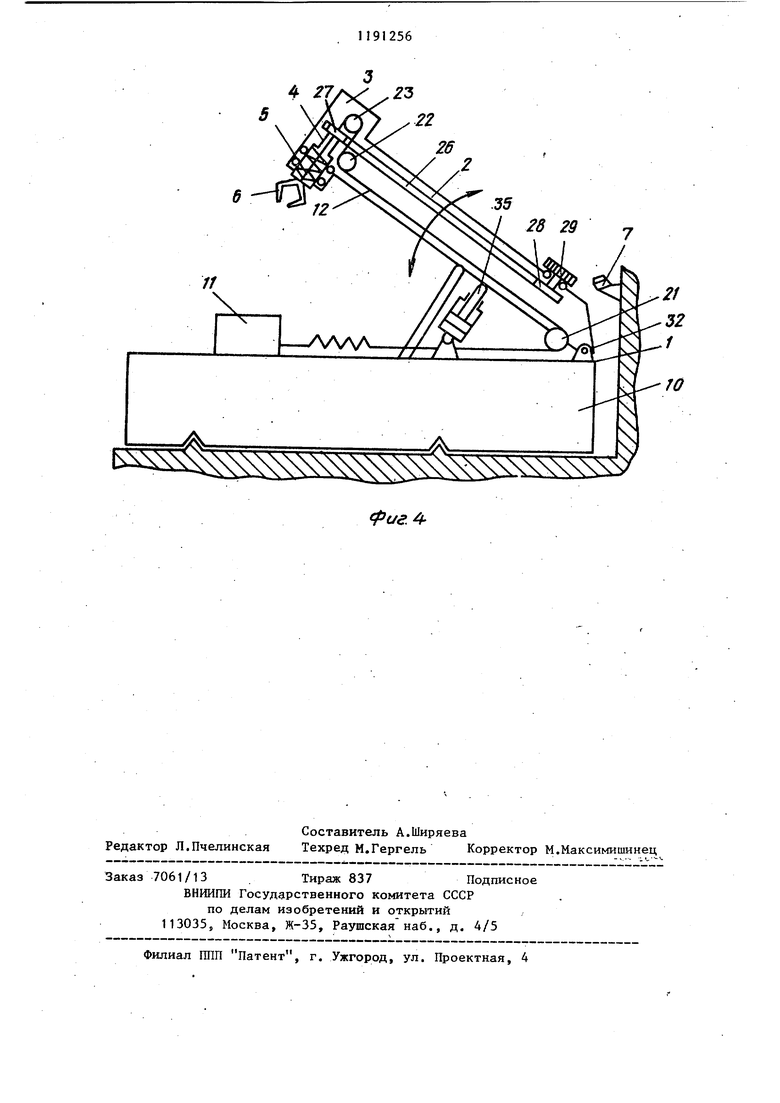
На фиг.1 изображен автооператор, общий вид на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - автооператор с предплечьем, установленным с возможностью перемещения в горизонтальном направлении при повороте плеча; на фиг.4 - автооператор с цепной передачей.
Автооператор содержит опорную
плиту 1, установленную на ней руку, включающую плечо 2 и предплечье 3, имеюще . вал-шестерню 4, схват 5 с губками 6, а также губчатую рейку 7, взаимодействующую с валом-шестерней 4, и упор 8, взаимодействующий с рукой. Автооператор установлен на основании 9 (которым может слухсить станина станка с ЧПУ) и имеет траверсу 10 и каретку 11, установленые с возможностью перемещения .во взаимно перпендикулярных направлени ях. Траверсой 10 и кареткой 11 могут cлvжить соответственно суппорт и каретка станка, для обслуживания которого предназначен автооператор. Автооператор снабжен гибкой тягой 12, взаимодействующей со схватом 5 и посредством пружины 13 связанной с кареткой 11. Упор 8 и опорная плита 1 установлены на траверсе .10, а на опорной плите 1 установлен привод руки 14, Зубчатая рейка 7 неподвижно закреплена на основании 9 предплечье 3 шарнирно сочленено со схватом 5 и снабжено фиксирующим устройством 15, а схват 5 связан с валом-шестерней 4 и установлен с возможностью поворота относительно предплечья 3 при зацеплении валашестерни 4 с зубчатой рейкой 7 в не12562
рабочем положении фиксирующего уст. ройства 15 (фиг.1).
Предплечье 3 в зоне шарнирного сочленения со схватом 5 снабжено направляющими 16, в которых установлен схват 5 с возможностью перемещения вдоль них. Автооператор снабжен ограничителем 17 перемещения схвата 5, контактирующим при перемещении
0 траверсы 10 с торцом зажатого губками 6 схвата 5 объекта (фиг.2).
Автооператор содержит устройство контроля усилия зажатия объекта губками 6 схвата 5, связанное с Системой управления станка (не показана) и выполненное в виде датчика 18 удлинения пружины (фиг.1) или в видё датчика 19 натяжения гибкой тяги 12 (фиг.1).
0 Предплечье 3 может быть шарнирно соединено с плечом 2 и установлено . относительно него с возможностью поворота вокруг шарнира 20 (фиг.1). Плечо 2 имеет ролики 21 и 22
5 для. гибкой тяги 12, расположенные
соответственно в зоне соединения плеча 2 с опорной плитой 1 и в зоне соединения плеча 2 с предплечьем 3, последнее также имеет ролик 23 для
Q гибкой тяги 12 (фиг.1).
Ролик 23 предплечья 3 имеет ось, смещенную относительно оси шарнира 20 плеча 2, Ролик 22, расположенный в зоне шарнирного соединения плеча 2 с предплечьем 3, установлен с возможностью, вращения при движении тяги.12 с направлением вращения, противоположным направлению вращения двух других роликов 21 и 23 (фиг.1).
0 Автооператор по второму варианту (фиг.З) отличается тем, что плечо 2 шарнирно соединено с опорной плитой 1 и имеет направляющую 24, а предплечье 3 имеет направляющий паз
25, в котором размещена направляющая 24 плеча 2, и установлено с возможностью перемещения в горизонтальном направлении при повороте плеча 2.
0 По третьему варианту выполнения (фиг.4) автооператор снабжен цепной передачей 26 со звездочками 27 и 28, а вал 4 расположен перпендикулярно плечу 2, последнее установлено
5. на опорной плите 1 с возможностью поворота и снабжено шестерней 29, взаимодействующей с зубчатой рейкой , 7. Звездочка 27 установлена на валу
4, а звездочка 2Ь - на одной оси с шестерней 29 (фиг.А).
Станок имеет патрон 30 и револьверную головку 31. Плечо 2 и опорная плита 1 могут быть соединены при помощи шарнира 32 (фиг.З).
Привод 14 может быть выполнен, например, в виде цилиндра 33, в котором размещен поршень 34 со штоком 35 Цилиндр 33 и шток 35 шарнирно соединены соответственно с опорной плитой 1 и. с предплечьем 3 (фиг.З). Полость цилиндра 33 сообщена с источником управляющей среды (не показан).
Вариант выполнения узла схватпредплечье.
Согласно этому варианту предплечье 3 может быть выполнено в вцде двух коаксиальных полых цилиндров причем внешний цилиндр, имеющий больший диаметр, шарнирно соединен с плечом 2 и снабжен подшипниковыми опорами для обеспечения возможности вргицения внутреннего цилиндра меньшего диаметра, последний шарнирно соединен со схватом 5, является соб.ственно валом-шестерней 4, установлен с возможностью вращения и имеет на противоположном схвату 5 конце зубчатое звено, например шестерню, взаимодействующую с зубчатой рейкой 7. Сквозь полость внутреннего цилиндра проходит гибкая тяга 12, связанная со схватом 5 и обеспечивающая при своем движении закрытие или раскрытие его губок 6.. Оба цилиндра имеют в своих боковых стенках соосные друг другу отверстия. В этих отверстиях размещается подпружиненный упор фиксирующего устройбтва 15 в его положении, при котором вал-шестерня 4, не находясь в зацеплении с рейкой 7, не вращается, а следовательно, не вращается и связанный с ним схват 5.
Автооператор имеет приводное устройство, взаимодействующее с его траверсой 10 и кареткой 11 (не показано) , которое может быть выполнено, например, в виде пневмо- или гидропривода, привода станка с ЧПУ,для работы с которым предназначен данный автооператор, и т.п.
Автооператор работает следующим образом.
При перемещении траверсы 10 установленная на ней опорная плита 1 с рукой перемещается в нужное положение. Привод 14 опускает схват 5, поворачивая предплечье 3 вокруг шарнира 20. Для этого от источника (не показан) управляющая среда под 5 давлением подается в надпоршневое пространство цилиндра 33, в результате чего поршень 34 со штоком 35 перемещается в нижнее положение. Затем начинает перемещаться каретка 11, натягивая npjj этом гибкую тягу 12, которая скользит по роликам 21-23 в результате связи со схватом
5сжимает его губки 6 и зажимает деталь. При этом усилие зажатия объекта губками 6 контролируется датчиком 18 удлинения пружины 13 или датчиком 19 натяжения гибкой тяги 12, подключенными к системе управления станка. Когда усилие зажатия достигнет требуемой (установленной) величины, по сигналу датчиков 18 и 19 каретка 11 останавливается. Патрон 30 станка открывается. Траверса 10 перемещается, и установлеи5 ная на ней рука выводит деталь из патрона 30. Затем привод 14 поднимает схват- 5 с деталью, для чего управляющая среда от источника подается в подпоршневое пространство i цилиндра 33 и перемещает поршень 34 со штоком 35 в верхнее положение. Далее траверса 10 перемещает руку до тех пор, пока вал-шестерня 4 не войдет в зацепление с зубчатой рейкой 7. В результате взаимодействия зубчатой пары вал-шестерня 4 .зубчатая рейка 7 вал-щестерня 4 начинает вращаться и поворачивает схват 5 с деталью на 180. После этого предплечье 3 со схватом 5 к зажатой его губками 6 деталью опускается. Траверса 10 перемещается до тех пор, пока деталь не окажется в патроне 30, в котором она и зажимается. Каретка 11 перемещается в обратном направлении, передвигает тягу 12 по роликам 21-23, в результате чего схват 5 раскрывает свои губки
6и освобождает деталь. Привод 14 поднимает предплечье 3 со схватом 5..
При этом поскольку при повороте предплечья 3 установленный на нем ролик 23 смещается относительно роликов 21 и 22 плеча 2, то для того, 5 чтобы гибкая тяга 12 в результате такого перемещения ролика 23 не провисла, ролик 22 установлен с воз-, можностью вращения при движении тяги 12 с направлением вращения, противоположным направлению вращения роликов 21 и 23, Это означает, что ролик 22 расположен как бы с другой стороны тяги 12 по сравнению с роли ками 21 и 23, т.е. для положения предплечья 3, изображенного на фиг„1, охватывающая ролики 21 и 23 тяга 12 натянута между ними по прямой линии, а ролик 22 только касается тяги 12. Когда предплечье 3 повернуто и ролик 23 смещается впра во, гибкая тяга 12 натягивается по прямой линии только на участке между роликами 21 и 22 и огибает последний и ролик 23,вследствие чего компенсируется образовавшийся излишек тяги 12., Такие перемещения автооператора и его звеньев обеспечивают выполнение им следующих операций. Рука, установленная на опорной плите Is которая, в свою очередь, размещена на траверсе 10, перемещается к тому участку станка, где расположены подлежащие обработке на этом станке объекты, например заготовки, уложенные в специальные кассеты. Кассеты с заготовками могут быть у -тановлены на специальном . транспортном средстве, обслуживающе данньй станок и координирующем свои перемещения относительно станка с его системой управления. При перемещениях траверсы 10, каретки 1 предплечья 3 и схвата 5 (в соотве--ствии с командами системы управления) последний выбирает нужную заготовку, зажимает ее своими губка ми 6 и устанавливает в патрон 30 стантЕ. Автооператор аналогичным образом может осуществить и установ-, ку в. револьверную головку 31 станка соответствующего инструмента, выбор которого также осуществляется по командам системы управления. После обработки готовое изделие перемещается в обратном порядке в соотвгтствунмцую кассету для готовых изделий. Автооператор по вариантам изображенным на фиг.З и 4, работает аналогично с тою разницей, что в первом случае (фиг.З) при подаче управляющей среды в подпоршневое пространство привода 1Д вьщвигающийся шток 35, шарнирнр соединенньш с плечом 2, по1ворачивает последнее вокруг шарнира 32. При этом в результате поворота направляющая 24 плеча 2 перемещается вниз и, скользя в пазу 25, передвигает предплечье 3 в горизонтальном направлении до зацепления вала-шестерни 4 с рейкой 7. I В автооператоре, изображенном на фиг.4, при подаче управляющей среды в подпоршневое пространство привода 14 вьщвигающийся шток 35, шарнирно соединенньй с плечом 2, поворачивает последнее вокруг шарнира 32 до зацепления шестерни 29 с рейкой 7. Шестерня 29 начинает вращаться, а вместе с ней начинает вращаться и связанная с шестерней 29 звездочка 28 цепной передачи 26. При этом приходит во вращение вторая звездочка 27 передачи 26, которай поворачивает схват 5 на 180. OSbffK, мг. /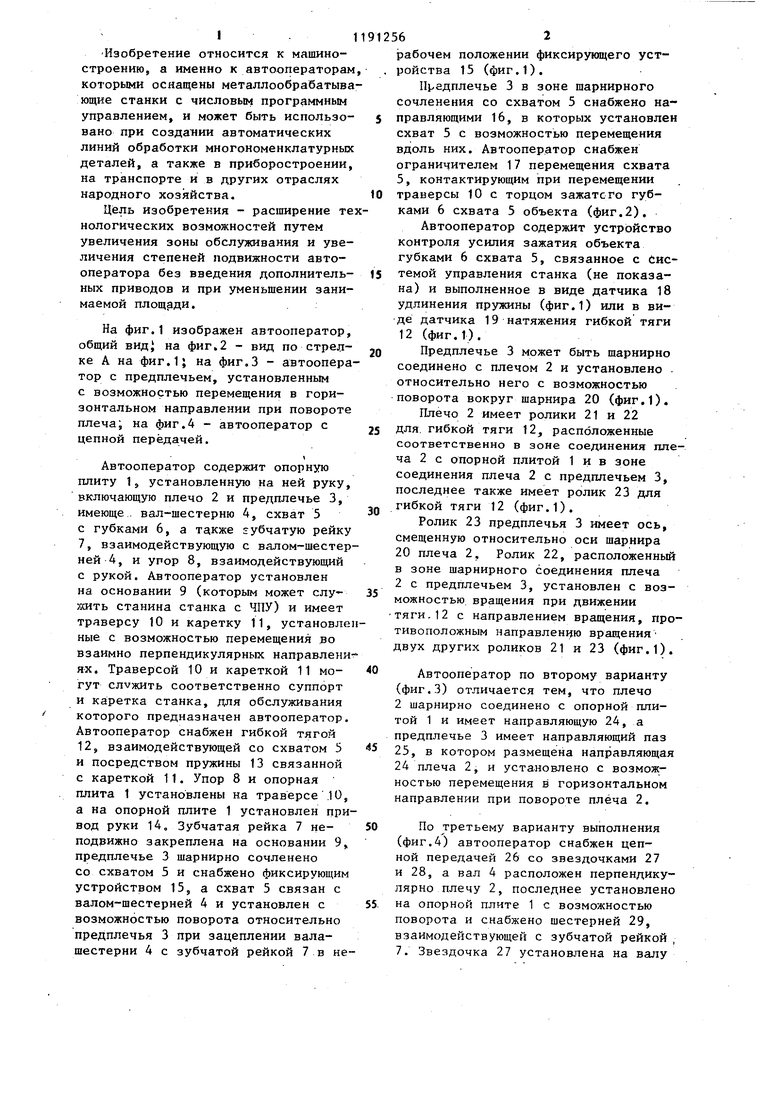
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |

1. АВТООПЕРАТОР, содержащий основание, опорную плиту, установленную на ней руку, состоящую из двух шарнирно соединенных звеньев, привод руки, выполненный в виде .силового цилиндра, корпус которого шарнирно установлен на опорной плите, а шток шарнирно соединен с вторым звеном руки, несущим захватное устройство, а первое звено шарнирно связано с опорной плитой, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения зоны обслуживания, он снабжен кареткой, траверсой, гибкой тягой, роликами, упором и зубчато-реечной передачей, причем на основании выполнены направляющие, накоторых установлена траверса, снабженная направляющими, выполненными перпендикулярно направляющим основания под каретку, связанную подпружиненной гибкой тягой, проходящей через ролики, установленные на осях шарниров звеньев руки,с захватным устройством, корпус которого установлен в направляющих, выполненных на втором звене руки параллельна оси шарниров звеньев руки, кроме того, упор установлен на опорной плите с возможностью взаимодействия с вторым звеном руки, а рейка зубчато-реечной передачи смонтирована неподвижно на основании и установлена .с возможностью взаимодействия с зубчатым колесом, жестко связанным с дополнительно введенным валом за- . г хватного устройства, установленным соосно второму звену руки. 2.Автооператор по п.1, о т л и чающийся тем, что во втором звене руки выполнен направляющий паз, а первое звено снабжено пальцем, взаимодействующим с направляю1ф1м пазом. 3.Автооператор по п.1, о т л ича ю щ ийс я тем, что он снабжен цепной передачей, одна из звездочек которой смонтирована на валу захватного устройства, установленного перпендикулярно оси руки, а другая звездочка смонтирована на оси, установленной на руке и жестко связан 1ой с зубчатым колесом зубчатореечной передачи.
«о
ю 4
фиг. 27,
| Промышленный робот | 1976 |
|
SU574319A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| . | |||
