ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе и способу для компенсации временных задержек в оружейных системах, где неизвестные временные задержки в линии передачи данных линии визирования между блоком (TSU) визирования цели и оружейной системой компенсируются.
УРОВЕНЬ ТЕХНИКИ
На поле боя жизненно важно иметь средство обнаружения целей и иметь необходимую огневую мощь, чтобы совершать атаки на цели и наносить ответный удар против атак противников. Также жизненно важно быть быстрым и подвижным на поле боя. Для этого вооружения присоединяются к моторизированным транспортным средствам, таким как легковые автомобили, внедорожники, вертолеты, самолеты и т.п. В то время как моторизированные транспортные средства обеспечивают необходимую скорость и подвижность, они приводят к проблемам в точности.
Упомянутые проблемы точности имеют несколько причин. Первое, стрельба с движущейся платформы требует компенсации перемещения упомянутой платформы. Для плавных перемещений относительно легко компенсировать перемещение платформы; однако, платформа почти никогда не перемещается плавно. Ускорение, замедление, дефекты на дороге, турбулентности в воздухе и т.д. влияют на плавность перемещения платформы. Помимо вышеупомянутых проблем, проблемы точности могут быть вызваны временной задержкой между системами в платформе. Например, летательный аппарат, как правило, содержит блок визирования цели, который наблюдает цели, и оружейную систему, которая обеспечивает огневую мощь по цели. Эти системы, как правило, взаимосвязаны через шину платформы. Вследствие временных задержек в шине, данные, сформированные блоком визирования цели, могут быть не приняты оружейной системой в то же самое время. Кажется, что временная задержка очень мала (порядка миллисекунд) и может не приниматься во внимание. Однако при стрельбе с больших расстояний (скажем, с летательного аппарата) эти небольшие временные задержки вызывают большие отклонения от цели. Другая проблема временной задержки между системами заключается в том, что временная задержка, по большей части, неизвестна. Следовательно, почти невозможно иметь общую компенсацию для временных задержек.
Патентный документ Соединенных Штатов под номером US 2012/246992 раскрывает дальномеры и способы наведения с помощью группировки снарядов.
Японский патентный документ под номером JP 2011/220625 раскрывает устройство наведения ракеты, предоставляющее технологию управления наведением, которая может наводить ракету в короткое время, чтобы заставлять ракету точно попадать в цель, даже в короткое время конечного наведения при нацеливании ракеты в летательном аппарате или т.п.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Целью изобретения является предоставление системы и способа для компенсации временных задержек в оружейных системах, где неизвестные временные задержки в линии передачи данных линии визирования между блоком (TSU) визирования цели и оружейной системой компенсируются.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Система и способ для компенсации временных задержек в оружейных системах для того, чтобы удовлетворять целям настоящего изобретения, иллюстрируется на прилагаемых чертежах, где:
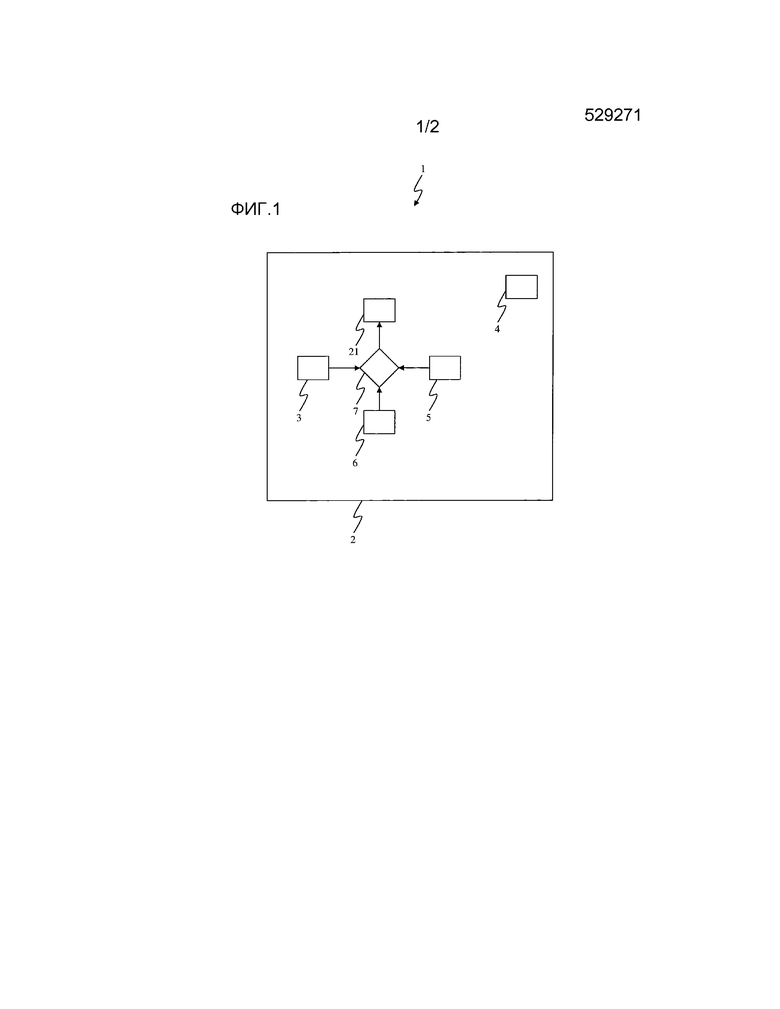
Фиг. 1 – это схематичный вид системы для компенсации временных задержек в оружейных системах.
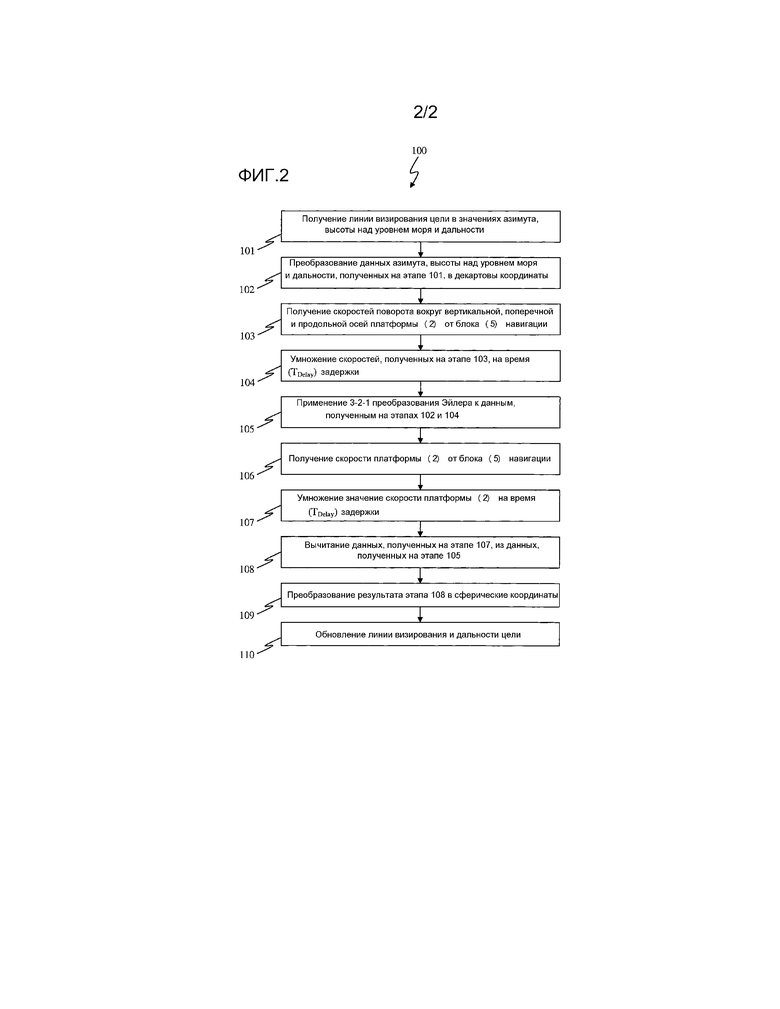
Фиг. 2 – это блок-схема последовательности операций способа для компенсации временных задержек в оружейных системах.
Элементы, показанные на чертежах, пронумерованы следующим образом:
1. Система для компенсации временных задержек в оружейных системах
2. Платформа
21. Оружейная система
3. Блок визирования цели
4. Блок целеуказания
5. Блок навигации
6. Дальномер
7. Блок управления
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Предложенная система (1) для компенсации временных задержек в оружейных системах по существу содержит
по меньшей мере одну платформу (2), которая обеспечивает необходимую мобильность и несет оружейную систему (21), обеспечивающую необходимую огневую мощь,
по меньшей мере один блок (3) визирования цели, который расположен на платформе (2) и который предоставляет возможность наблюдения и захвата целей, и
по меньшей мере один блок (4) целеуказания, который предпочтительно присоединен к дулу одного из орудий в оружейной системе (21) на платформе (2) и который обеспечивает указание целей,
по меньшей мере один блок (5) навигации, который предоставляет значения угловой и линейной скорости платформы (2),
по меньшей мере один дальномер (6), который предоставляет значение расстояния платформы (2) до цели,
по меньшей мере один блок (7) управления, который получает данные, предоставленные блоком (3) визирования цели, блоком (5) навигации и дальномером (6), и выполняет операции по полученным данным.
Предложенная система (1) для компенсации временных задержек в оружейных системах по существу содержит по меньшей мере одну платформу (2), которая несет оружейную систему (21), обеспечивающую огневую мощь на поле боя. В предпочтительном варианте осуществления изобретения платформа (2) является летательным аппаратом, таким как вертолет. Для того, чтобы отслеживать цели и захватывать их, по меньшей мере один блок (3) визирования цели расположен на платформе (2). Оружейная система (21), расположенная на платформе, наводится на цель с помощью информации, предоставленной блоком (3) визирования цели. Для того, чтобы определять, куда указывает оружейная система (21) по меньшей мере один блок (4) целеуказания расположен на платформе (2). В предпочтительном варианте осуществления изобретения блок (4) целеуказания прикрепляется на дуло по меньшей мере одного орудия в оружейной системе (21). В этом варианте осуществления блок (4) целеуказания является лазерным целеуказателем. По меньшей мере один блок (5) навигации, который предоставляет значения угловой и линейной скорости платформы (2), расположен на платформе (2). Предложенная система (1) для компенсации временных задержек в оружейных системах дополнительно содержит по меньшей мере один дальномер (6), который предоставляет значение расстояния платформы (2) до цели. Предложенная система для компенсации временной задержки в оружейных системах (1) дополнительно содержит по меньшей мере один блок (7) управления, который получает данные, предоставленные блоком (3) визирования цели, блоком (5) навигации и дальномером (6), и выполняет операции по полученным данным. Операции, выполняемые по полученным данным, могут включать в себя, но не только, математические операции, логические операции и т.п.
В предпочтительном варианте осуществления изобретения блок (5) навигации является инерциально-навигационным блоком.
В предпочтительном варианте осуществления изобретения дальномер (6) является лазерным дальномером.
Способ (100) компенсации временных задержек в оружейных системах содержит этапы:
получение (101) линии визирования цели в значениях азимута, высоты над уровнем моря и наклонной дальности,
преобразование (102) данных азимута, высоты над уровнем моря и дальности, полученных на этапе 101, в декартовы координаты,
получение (103) скоростей поворота вокруг вертикальной, поперечной и продольной осей платформы (2) от блока (5) навигации,
умножение (104) скоростей, полученных на этапе 103, на время (TDelay) задержки,
применение (105) 3-2-1 преобразования Эйлера к данным, полученным на этапе 102 и 104,
получение (106) скорости платформы (2) от блока (5) навигации,
умножение (107) значения скорости платформы (2) на время (TDelay) задержки,
вычитание (108) данных, полученных на этапе 107, из данных, полученных на этапе 105,
преобразование (109) результата этапа 108 в сферические координаты,
обновление (110) линии визирования и дальности цели.
В предпочтительном варианте осуществления изобретения блок (3) визирования цели содержит по меньшей мере два кодера, которые предоставляют позицию блока (3) визирования в значениях азимута и высоты над уровнем моря, относительно платформы (2). В этом варианте осуществления изменение в линии визирования вследствие перемещения платформы (2) компенсируется с использованием данных, полученных от блока (5) навигации.
В способе (100) компенсации временных задержек в оружейных системах линия визирования цели получается (101) в значениях азимута, высоты над уровнем моря и наклонной дальности. В предпочтительном варианте осуществления изобретения линия визирования цели получается в значениях азимута, высоты над уровнем моря и дальности, и они получаются с периодом, равным времени задержки. После того как линия визирования получена, значения преобразуют (102) в декартовы координаты. Потом получают (103) скорости поворота вокруг вертикальной, поперечной и продольной осей платформы (2). Полученные скорости поворота вокруг вертикальной, поперечной и продольной осей затем умножают (104) на время (TDelay) задержки. Углы Эйлера затем вычисляются в значениях скоростей поворота вокруг вертикальной, поперечной и продольной осей. Кроме того, позиция цели получается в декартовых координатах, и эти декартовы координаты затем преобразуют (105) с помощью по меньшей мере одного преобразования. После преобразования данных получают (106) скорость платформы (2). Значение скорости платформы (2) получается в декартовых координатах. Значение скорости затем умножают (107) на время (TDelay) задержки (107). Значение скорости, умноженное на время (TDelay) задержки, затем преобразуют (108) в сферические координаты и вычитают из координат, полученных на этапе 105. Потом, результат преобразуют (109) в сферические координаты. Линию визирования и дальность цели обновляют (110) относительно этих координат (110).
В предпочтительном варианте осуществления изобретения время (TDelay) задержки сначала аппроксимируют и затем экспериментально калибруют. Процесс калибровки выполняется следующим образом:
В то время как платформа (2) зависает, блок (3) визирования цели захватывает цель,
Платформа (2) маневрирует по вертикальной оси поворота, в то время как наземный обслуживающий персонал наблюдает за блоком (4) целеуказания. Если сигнал целеуказания (который является лазерным в предпочтительном варианте осуществления) перемещается в направлении платформы (2), TDelay увеличивают. Если сигнал целеуказания перемещается в противоположном направлении платформы (2), TDelay уменьшают. TDelay фиксируют для минимального перемещения сигнала целеуказания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ ЗОНДИРОВАНИЯ КОНТРОЛИРУЕМОГО ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СИСТЕМОЙ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2009 |
|
RU2408032C2 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ БМД-4М В РЕЖИМЕ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2715940C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКОЙ | 2024 |
|
RU2828168C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
| СПОСОБ ДОСТАВКИ НА ТОЧЕЧНУЮ ЦЕЛЬ ИЗЛУЧЕНИЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2019 |
|
RU2724240C1 |
| СИСТЕМА АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2016 |
|
RU2639583C1 |
Изобретение относится к области приборостроения и может найти применение для компенсации временных задержек в оружейных системах, где неизвестные временные задержки в линии передачи данных линии визирования между блоком (TSU) визирования цели и оружейной системой компенсируются. Технический результат - компенсации временных задержек в оружейных системах. Для этого система содержит по меньшей мере одну платформу, которая обеспечивает необходимую мобильность и несет оружейную систему, обеспечивающую необходимую огневую мощь, по меньшей мере один блок визирования цели, который расположен на платформе и который предоставляет возможность наблюдения и захвата целей, и по меньшей мере один блок целеуказания, который предпочтительно прикрепляется на дуло одного из орудий в оружейной системе на платформе и который обеспечивает указание целей, по меньшей мере один блок навигации, который предоставляет значения угловой и линейной скорости платформы, по меньшей мере один дальномер, который предоставляет значение расстояния платформы до цели, по меньшей мере один блок управления, который получает данные, предоставленные блоком визирования цели, блоком навигации и дальномером, и выполняет операции по полученным данным. 2 з.п. ф-лы, 2 ил.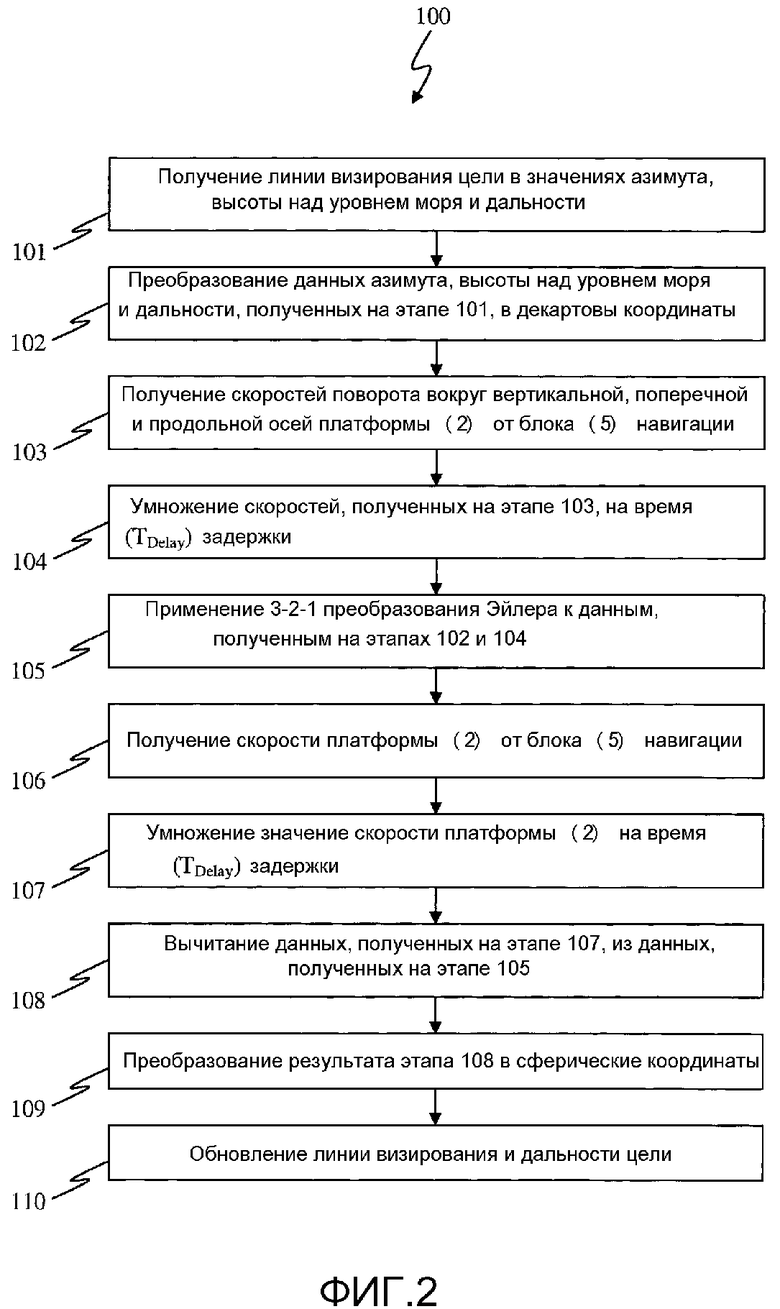
1. Способ (100) компенсации временных задержек в оружейных системах, отличающийся тем, что содержит этапы, на которых:
получают (101) линию визирования цели в значениях азимута, высоты над уровнем моря и наклонной дальности,
преобразуют (102) данные азимута, высоты над уровнем моря и дальности, полученные на этапе 101, в декартовы координаты,
получают (103) скорости поворота, вокруг вертикальной, поперечной и продольной осей платформы (2) от блока (5) навигации,
умножают (104, 105, 106, 107) полученные угловые скорости и скорость платформы (2) на время (TDelay) задержки, тем самым определяя смещение и углы платформы (2)в течение времени задержки,
вычитают (108)смещение платформы от линии визирования цели, выраженной в декартовых координатах, и затем умножают линию визирования, выраженную в декартовых координатах, с помощью матрицы преобразования, созданной посредством углов поворота, тем самым определяя скорректированную линию визирования цели, выраженную в декартовых координатах,
преобразуют (109) скорректированную линию визирования цели, выраженную в декартовых координатах, в сферические координаты, тем самым выражая скорректированную линию визирования цели в значения азимута, высоты над уровнем моря и наклонной дальности,
обновляют (110) линию визирования и дальность цели, при этом временную задержку сначала аппроксимируют и экспериментально калибруют, и
осуществляют процесс калибровки, включающий этапы, на которых:
захватывают с помощью блока (3) визирования цели цель, в то время как платформа (2) зависает,
осуществляют маневрирование платформы (2) по вертикальной оси поворота, в то время как наземный обслуживающий персонал наблюдает за блоком (4) целеуказания,
если сигнал целеуказания перемещается в направлении платформы (2), увеличивают TDelay,
если сигнал целеуказания перемещается в противоположном направлении платформы (2), уменьшают TDelay,
фиксируют TDelay для минимального перемещения сигнала целеуказания.
2. Способ (100) компенсации временных задержек в оружейных системах по п. 1, отличающийся тем, что линии визирования цели и дальность цели получают в значениях азимута и высоты над уровнем моря.
3. Способ (100) компенсации временных задержек в оружейных системах по п. 2, отличающийся тем, что линия визирования цели и дальность цели получают с периодом, равным времени задержки.
| US 7870816 B1, 18.01.2011 | |||
| US 5166689 A1, 24.11.1992 | |||
| СПОСОБ КОМПЕНСАЦИИ ДИФФЕРЕНЦИАЛЬНОЙ МОДОВОЙ ЗАДЕРЖКИ МНОГОМОДОВОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ В РЕЖИМЕ ПЕРЕДАЧИ МАЛОМОДОВЫХ СИГНАЛОВ | 2010 |
|
RU2468399C2 |
| Гурецкий Х | |||
| Анализ и синтез систем управления с запаздыванием | |||
| М | |||
| Машиностроение | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| US 0004855932 А1, 08.08.1989. | |||

