Область техники
Настоящее изобретение относится к моторизированному погрузчику, имеющему управляемое рычагом управляемое колесо.
Настоящее изобретение, в частности, но не исключительно, относится к управляемым пешим водителем переносчикам поддонов, вилочным погрузчикам и подъемникам-загрузчикам.
Уровень техники
Множество материалов хранятся на товарных складах на поддонах либо на поверхности земли, либо над ней на стеллажах. Проходы между размещенными на поддонах материалами обеспечивают оператору управляемых пешим водителем вилочных погрузчиков возможность выбирать любой поддон, который бы им не потребовался. Однако, эти проходы должны иметь некоторую минимальную ширину для обеспечения возможности неограниченной работы этих погрузчиков. Далее это будет описано со ссылкой на фиг. 1a и 1b.
На фиг. 1a представлен вид сверху в плане обычного управляемого пешим водителем вилочного погрузчика. Погрузчик содержит шасси 10, имеющее левое и правое не управляемые не приводные передние колеса 12L, 12R, соответственно, и управляемое заднее приводное колесо 14, расположенное относительно передних колес центрально посередине, но смещенное в заднем направлении. Шасси 10 несет обычный подъемный механизм, такой как мачта 16 и подъемные вилы 18. В некоторых погрузчиках с рычагом подъемные вилы заменены на подъемные платформы. Заднее колесо 14 прямо или опосредованно соединено с управляющим рычагом 20 посредством механического, гидравлического, электрического или другого соединения. Погрузчиком управляет пеший водитель 24 при помощи головки 22 рычага, смонтированной на свободном заднем конце рычага 20. Тяговый двигатель (не показан на фиг. 1a и 1b) приводит управляемое заднее колесо 14 в движение в прямом или обратном направлении вокруг горизонтальной оси 26 вращения под управлением работающих вручную управляющих элементов (также не показаны) на головке 22 рычага.
Заднее колесо 14 управляется посредством вращения вокруг по существу вертикальной оси при помощи вращения рычага 20. Соединение между рычагом 20 и задним колесом 14 является таким, что когда рычаг 20 поворачивают на некоторый угол, заднее колесо 14 поступает также таким образом, что заднее колесо 14 всегда находится на одной линии с рычагом 20; т.е. горизонтальная ось 26 вращения заднего колеса 14 всегда нормальна по отношению к вертикальной плоскости, содержащей рычаг 20.
Обычные управляемые пешим водителем вилочные погрузчики, такие как описанные выше, обычно работают в проходе 30 (фиг. 1b) между двумя параллельными рядами 32 размещенных на поддонах товаров. Для того, чтобы подобрать любой конкретный поддон, погрузчику необходимо быть изначально расположенным под прямым углом к ряду 32, при этом его рычаг 20 проходит прямо назад, как показано на фиг. 1b. Это означает, что проход 30 должен иметь минимальную ширину W, равную полной длине погрузчика. Требуемое пространство S для управления является необходимым, но фактически напрасно расходует пространство для хранения.
Раскрытие изобретения
В соответствии с настоящим изобретением предложен моторизированный погрузчик с рычагом, содержащий:
(a) шасси, имеющее множество взаимодействующих с поверхностью земли колес, по меньшей мере одно из которых является управляемым для управления указанным погрузчиком;
(b) приводной двигатель для приведения в движение по меньшей мере одного из указанных колес для перемещения погрузчика по поверхности земли;
(c) рычаг, который соединен с возможностью вращения с шасси и который может качаться из стороны в сторону для управления погрузчиком;
(d) управляющий двигатель для изменения угла управляемого колеса;
(e) контроллер управляющего двигателя, который в нормальном режиме работы принимает в качестве входного сигнала показание угла рычага и в ответ на это выводит управляющий сигнал на управляющий двигатель для изменения угла управляемого колеса таким образом, что угол между рычагом и управляемым колесом поддерживает заранее определенное угловое смещение;
причем угловое смещение между рычагом и управляемым колесом может быть отрегулировано, а отрегулированное угловое смещение затем использовано в качестве указанного заранее определенного углового смещения.
Это обеспечивает более значительную маневренность по сравнению с обычными погрузчиками, где рычаг неизменно выровнен с приводным колесом. Это дополнительно обеспечивает погрузчику возможность движения прямо вперед в прямом или обратном направлении при смещении рычага на значительную величину, также при смещении оператора и рычага в отношении стороны погрузчика.
Контроллер управляющего двигателя может быть соединен с управляющим двигателем или быть отделенным от него. Он может быть реализован в аппаратном, программно-аппаратном или программном обеспечении, работающем на подходящем обрабатывающем устройстве. Он может быть реализован в виде логических схем, которые могут быть программируемыми или специализированными для этой задачи. Когда контроллер управляющего двигателя реализован с использованием программирования, устройство, на котором он работает, или в котором он запрограммирован, может исполнять дополнительные функции, относящиеся или не относящиеся к управлению.
Предпочтительно, контроллер управляющего двигателя дополнительно выполнен с возможностью управления указанным колесом в режиме работы повторного выравнивания таким образом, чтобы изменять указанное заранее определенное угловое смещение.
В частности, путем обеспечения режима работы повторного выравнивания, рычаг может быть смещен от управляющего направления, или с другой стороны, управляемое колесо может быть повторно выровнено вдоль другой оси, когда рычаг смещен в одну сторону.
Особенно предпочтительный вариант осуществления изобретения обеспечивает возможность автоматического выравнивания управляемого колеса с любой из двух главных осей, представляющих интерес, а именно, оси рычага и главной оси шасси погрузчика, т.е. нормальной оси, проходящей в направлении спереди назад, или оси, по которой выровнен рычаг, когда находится в нейтральном управляющем положении.
Следовательно, предпочтительно, в режиме работы повторного выравнивания, контроллер управляющего двигателя выполнен с возможностью изменения указанного заранее определенного угла между (i) нулевым углом рычага, при котором колесо выровнено параллельно этому рычагу, и (ii) нулевым углом шасси, при котором колесо выровнено параллельно оси шасси и смещено от рычага на тот же угол, на который рычаг смещен от шасси, во время режима работы повторного выравнивания.
Как упомянуто выше, ось шасси предпочтительно является осью, заданной осью рычага, когда рычаг находится в нейтральном управляющем положении. Это может быть ось, проходящая в направлении спереди назад, ось, проходящая в направлении слева направо, ось, заданная вилами, обеспеченными на погрузчике (например, на переносчике поддонов или вилочном погрузчике и т.п.).
Предпочтительно, контроллер управляющего двигателя принимает в качестве входного сигнала показание угла рычага относительно по меньшей мере одного из указанных шасси, управляемого колеса или управляющего двигателя.
Дополнительно предпочтительно, контроллер управляющего двигателя принимает в качестве входного сигнала показание управляющего угла управляемого колеса относительно по меньшей мере одного из указанных шасси, рычага или управляющего двигателя.
Принятое показание угла рычага может быть абсолютным измерением, или может быть указанием на то, что угол изменился на обнаруженную величину.
Предпочтительно, погрузчик дополнительно содержит систему угловых датчиков, состоящую по меньшей мере из одного датчика и которая обнаруживает и выводит показание или показания на относительный угол между двумя или большим количеством из указанных рычага, управляемого колеса, управляющего двигателя и шасси.
Для обеспечения требуемого вывода может быть использована любая подходящая система датчиков. Предпочтительно, система датчиков содержит по меньшей мере один датчик поворота, который воспринимает относительный угол между двумя или большим количеством компонентов. Специалистам в данной области техники будет понятно, что если, например, управляющий двигатель прикреплен к шасси, и обеспечены два угловых датчика, при этом один датчик обеспечивает угол управляемого колеса относительно корпуса двигателя, а другой - угол между рычагом и корпусом двигателя (или шасси), то будет обычной задачей рассчитать относительный угол между рычагом и управляющим колесом, как сумму или разность указанных углов, скорректированных с помощью смещения.
Дополнительно предпочтительно, показание или показания, выведенные системой угловых датчиков, обеспечивает (обеспечивают) контроллер управляющего двигателя информацией для определения, во время режима работы повторного выравнивания, угла между рычагом и управляемым колесом и/или угла между управляемым колесом и шасси.
Более предпочтительно, когда контроллер управляющего двигателя выполнен с возможностью изменения указанного заранее определенного угла на нулевой угол рычага, он принимает в качестве входного сигнала от системы угловых датчиков информацию, достаточную для определения угла между рычагом и управляемым колесом, а когда контроллер управляющего двигателя выполнен с возможностью изменения указанного заранее определенного угла на нулевой угол шасси, он принимает в качестве входного сигнала от системы угловых датчиков информацию, достаточную для определения угла между управляемым колесом и шасси.
Приводной двигатель предпочтительно выполнен с возможностью приведения управляемого колеса. Он работает независимо от того, колесо выровнено с рычагом или шасси, или есть некоторое другое выравнивание. Он может быть опционально отключен во время режима работы повторного выравнивания, но это не является важным.
В предпочтительной конфигурации шасси поддерживает рычаг на заднем конце и вилы на переднем конце, а управляемое колесо находится на заднем конце, при этом по меньшей мере одно неуправляемое колесо (которое может приводиться в действие или нет) на переднем конце.
Особенно предпочтительная конфигурация представлена трехколесным погрузчиком с двумя передними колесами, которые являются не приводными и не управляемыми, и с одним приводным управляемым задним колесом, которое расположено главным образом под осью вращения рычага.
Ось вращения рычага является предпочтительно вертикальной или содержит существенный вертикальный компонент (>45 градусов от горизонтали, более предпочтительно, >60 градусов, еще более предпочтительно, >75 градусов, а наиболее предпочтительно, от 85 до 90 градусов от горизонтали), такой, что когда рычаг вращают вокруг этой оси, он качается в сторону, а не просто вертикально (как это было бы вокруг горизонтальной оси).
В предпочтительном варианте осуществления изобретения рычаг имеет головку рычага на своем свободном конце, а головка рычага имеет по меньшей мере один элемент ручного управления, который при активации включает режим работы повторного выравнивания.
В особенно предпочтительном варианте осуществления указанные элементы ручного управления могут выбирать между по меньшей мере двумя состояниями, а именно, нулевым углом рычага и нулевым углом шасси, как описано выше.
Предпочтительно, когда контроллер управляющего двигателя находится в режиме работы повторного выравнивания, рычаг отсоединен от управляемого колеса.
Предпочтительно, когда контроллер управляющего двигателя в режиме работы повторного выравнивания завершил управление колесом таким образом, чтобы изменить указанное заранее определенное угловое смещение, контроллер управляющего двигателя возвращается в нормальный режим работы для управления колесом для следования за рычагом, на основании нового заранее определенного углового смещения, полученного в режиме повторного выравнивания.
Режим работы повторного выравнивания может быть реализован при помощи сохранения нового заранее определенного углового смещения, которое затем управляющие двигатель реализует в нормальной управляющей работе посредством приведения в соответствие действительного смещения с новым сохраненным смещением.
Согласно дополнительному аспекту изобретения предложен управляемый пешим водителем моторизированный погрузчик с рычагом, содержащий управляемое рычагом управляемое колесо, причем рычаг может быть выборочно отсоединен от указанного приводного колеса и повторно соединен с ним для обеспечения возможности вращения этого рычага независимо от управляющего угла указанного приводного колеса, в результате чего рычаг может быть закреплен в различных угловых положениях относительно указанного приводного колеса.
Это позволяет более значительную маневренность по сравнению с обычными погрузчиками, где рычаг неизменно выровнен с приводным колесом.
Предпочтительно, приводное колесо моторизировано и может быть приведено в движение как с помощью рычага, выровненного с указанным колесом, так и с помощью смещения рычага от направления движения приводного колеса.
Это обеспечивает погрузчику возможность маневрирования в малых пространствах, таких как проходы товарного склада, при этом оператор и рычаг находятся под углом смещения. В частности, погрузчик может двигаться вперед в загрузочное пространство и назад из него, при смещении рычага и операторе, стоящем в стороне, а не на линии с направлением движения.
В предпочтительном варианте осуществления изобретения рычаг имеет головку рычага на своем свободном конце, головка рычага имеет действующий вручную управляющий элемент, который, когда помещен в одно состояние, отсоединяет этот рычаг от приводного колеса, а когда помещен во второе состояние, повторно соединяет рычаг с приводным колесом.
Предпочтительно, погрузчик имеет управляющий двигатель для изменения управляющего угла приводного колеса.
Дополнительно погрузчик предпочтительно имеет контроллер управляющего двигателя, который принимает в качестве входного сигнала показание угла рычага и выводит управляющий сигнал на управляющий двигатель для изменения управляющего угла в соответствие с обнаруженными изменениями угла рычага.
Предпочтительно, пока рычаг отсоединен от приводного колеса, изменения угла рычага либо не получают в качестве входного сигнала, либо не преобразуют в выводные управляющие сигналы для управляющего двигателя.
Погрузчик дополнительно предпочтительно содержит датчик угла рычага, который воспринимает угол рычага относительно одного из приводного колеса и шасси погрузчика с рычагом и обеспечивает показание указанного угла в качестве входного сигнала на контроллер управляющего двигателя.
Погрузчик дополнительно предпочтительно содержит рулевое управление для оператора для выборочного включения управляющего двигателя и изменения управляющего угла относительно рычага.
В предпочтительном варианте осуществления изобретения контроллер управляющего двигателя выполнен с возможностью приема в качестве входного сигнала выбора конкретного углового соотношения между рычагом и приводным колесом и возможностью вывода управляющего сигнала на управляющий двигатель для изменения управляющего угла до указанного выбора.
Предпочтительно, погрузчик снабжен конкретным управляющим входом для обеспечения выбора отдельного углового соотношения между рычагом и погрузчиком.
Предпочтительно, контроллер управляющего двигателя выполнен с возможностью приема в качестве входного сигнала показания текущего управляющего угла и с возможностью сравнения текущего управляющего угла с требуемым углом, сохраненным в запоминающем устройстве или регистре, доступном для контроллера управляющего двигателя, и возможностью вывода на управляющий двигатель управляющего сигнала для изменения управляющего угла для соответствия указанному требуемому углу.
Предпочтительно, погрузчик дополнительно содержит запоминающее устройство или регистр.
Дополнительно предпочтительно, указанный требуемый угол переустанавливают для соответствия текущему обнаруженному углу, когда рычаг повторно соединяют с приводным колесом.
Контроллер управляющего двигателя может быть реализован в виде аппаратных управляющих схем, которые сконструированы с возможностью реализации каждой функции, приписанной ему выше, или эта функциональность может быть реализована в логических схемах или программируемой логике или процессоре, выполняющем инструкции программного обеспечения в любом подходящем формате кода. Если запоминающее устройство или регистр использован(о) для сохранения требуемого угла, то запоминающее устройство или регистр может быть объединен(о) с управляющими схемами, логикой или процессором, или может быть отделен(о) от них и доступно для них.
Предпочтительно, рычаг может быть смещен от приводного колеса на угол, равный 75 градусам или больше, более предпочтительно 90 градусам или больше.
Моторизированный погрузчик с рычагом предпочтительно может быть вилочным погрузчиком, переносчиком поддонов или подъемником-загрузчиком.
Также предложен способ маневрирования моторизированным погрузчиком с рычагом, включающий следующие этапы:
(a) этап движения погрузчика в проходе, при этом рычаг по существу выровнен с управляемым колесом погрузчика;
(b) этап размещения переднего конца погрузчика вплотную к пространству, в котором погрузчик должен маневрировать по этому проходу;
(c) этап регулировки углового смещения между рычагом и управляемым колесом таким образом, что управляемое колесо смещено от линии рычага более чем на 45 градусов; и
(d) этап движения передней части погрузчика в указанное пространство с поддержанием указанного смещения, составляющего больше чем 45 градусов, между управляемым колесом и рычагом.
Под термином «по существу выровнен» подразумевается, что колесо выровнено с рычагом в достаточной степени для того, чтобы он воспринимался для правильного управления, т.е. нет необходимости в точном выравнивании.
Альтернатива этапам (c) и (d) состоит в том, что на этапе (c) рычаг смещен от нейтрального управляющего положения на величину, по меньшей мере равную углу, требуемому для того, чтобы указанный конец рычага находился на одном уровне с задней частью погрузчика или перед ним, а также для того, чтобы колесо затем было выровнено с главной осью шасси, это определяет угол смещения между рычагом и колесом, который поддерживается по мере того, как передняя часть погрузчика движется в указанном пространстве.
Предпочтительно, на этапах (a) и (b) колесо выровнено с линией рычага в пределах 10 градусов или меньше, более предпочтительно, 5 градусов или меньше, а наиболее предпочтительно, в пределах 3 градусов или меньше. Наиболее предпочтительно, колесо следует по существу тому же углу, что и рычаг, в пределах границ регулирования управляющего двигателя и контроллера.
Предпочтительно, на этапах (c) и (d) управляемое колесо смещено от линии рычага на 60 градусов или больше, более предпочтительно, на 80 градусов или больше. В особенно предпочтительном варианте реализации указанного способа смещение задано, когда колесо выровнено с шасси, а рычаг вращают на величину, достаточную для того, чтобы привести конец рычага на один уровень с самой задней точкой корпуса погрузчика или перед ним.
Краткое описание чертежей
Теперь будут описаны на примерах варианты осуществления настоящего изобретения со ссылкой на сопутствующие чертежи.
На фиг. 1a и 1b (описаны ранее) показаны схематические виды сверху в плане обычного управляемого пешим водителем вилочного погрузчика.
На фиг. 2a и 2b показаны схематические виды сверху в плане варианта осуществления моторизированного погрузчика с рычагом в соответствии с настоящим изобретением, как он маневрирует в течение обычной последовательности операций в проходе.
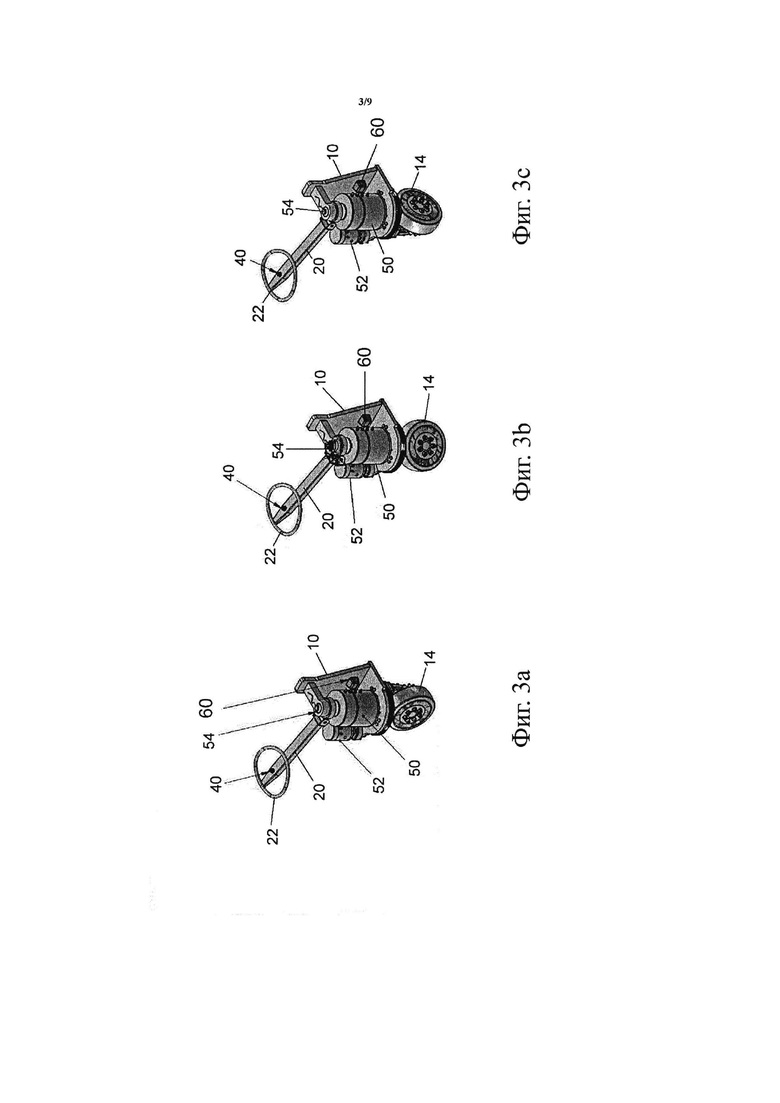
На фиг. 3a-3c показаны перспективные виды управляющего механизма погрузчика, показанного на фиг. 2.
На фиг. 4 показана структурная схема управляющей схемы для погрузчика, показанного на фиг. 2.
На фиг. 5 показана блок-схема работы контроллера управляющего двигателя для использования в моторизированном погрузчике с рычагом в соответствии с настоящим изобретением в режиме «выравнивания с рычагом».
На фиг. 6 показана блок-схема работы контроллера управляющего двигателя для использования в моторизированном погрузчике с рычагом в соответствии с настоящим изобретением в режиме «выравнивания с шасси».
На фиг. 7a-7f показаны схематические виды сверху в плане другого варианта осуществления моторизированного погрузчика с рычагом в соответствии с настоящим изобретением и обычная последовательность операций.
На фиг. 8-11 показаны блок-схемы, подробно описывающие работу указанного контроллера в различных режимах работы.
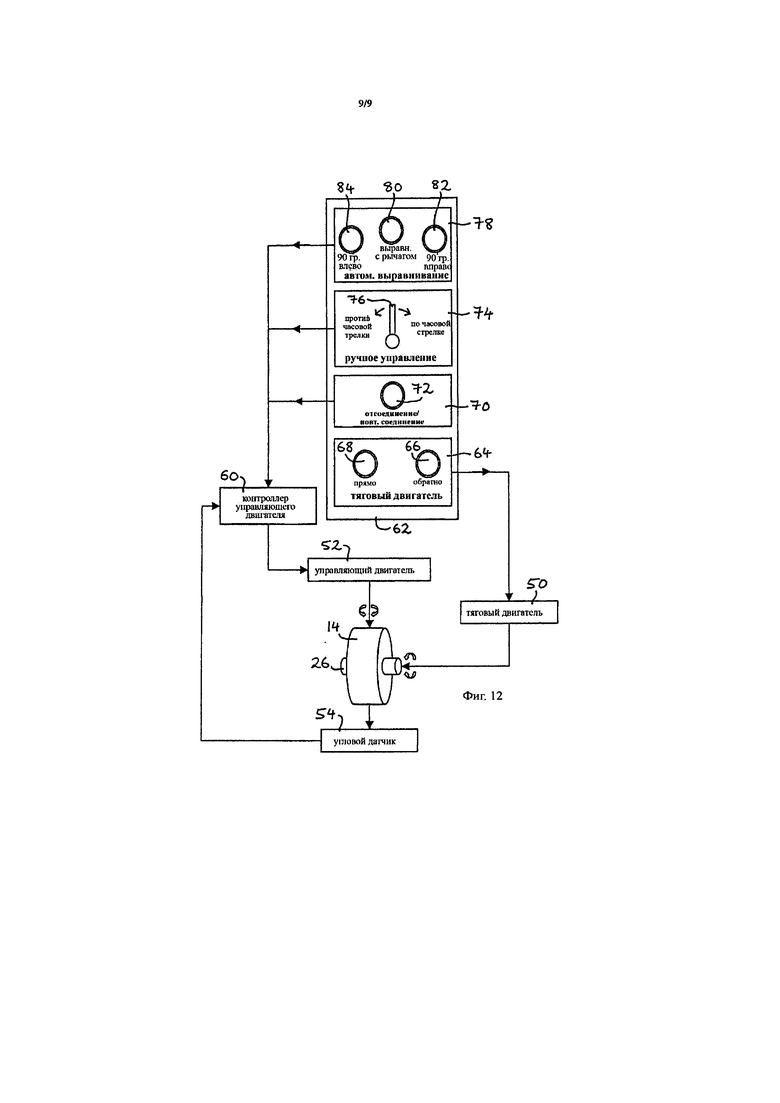
На фиг. 12 показана структурная схема управляющей схемы для вилочного погрузчика.
Подробное описание предпочтительных вариантов осуществления изобретения
На чертежах одинаковые позиционные обозначения были использованы для одинаковых или эквивалентных компонентов.
Обратимся к фиг. 2a и 2b, на которых последовательно в положениях, обозначенных 1, 2, 3, 4, 5, показан управляемый пешим водителем вилочный погрузчик или переносчик поддонов (для целостности положение 3 повторяется в конце фиг. 2a и в начале 2b) по мере того, как он маневрировал в пространстве 11 в проходе 30 между двумя рядами размещенных на поддонах товаров. В общем, этот погрузчик имеет ту же конфигурацию, что и описанный выше в отношении фиг. 1a и 1b, следовательно, подобные части, такие как шасси 10, рычаг 20, управляемое колесо 14 и т.п. обозначены подобными позиционными обозначениями и не должны быть специально описаны снова.
Ширина этого прохода не намного больше, чем длина погрузчика плюс его груз 13, как можно видеть на фиг. 2a и 2b, положение 3. Тем не менее, погрузчик может с легкостью маневрировать в пространство 11 и из него, когда такое пространство не позволит работать обычному погрузчику с рычагом.
В положении 1 (самое левое изображение на фиг. 2a) погрузчик работает в нормальном режиме работы, при этом его заднее управляемое колесо выровнено с осью рычага 20. Обычным образом оператор маневрирует погрузчиком в положение 2 (центральное положение на фиг. 2a), где груз 13 почти выровнен в пространстве 11, и затем в положение 3 (самое правое изображение на фиг. 2a и самое левое изображение на фиг. 2b).
Хотя обычный погрузчик мог бы маневрировать в положение 3, он не смог бы двигаться в пространстве 11, поскольку управляющее направление колеса 14 перпендикулярно требуемому направлению движения.
Однако, погрузчик, показанный на фиг. 2a и 2b, снабжен функциональными возможностями для изменения угла между колесом и рычагом до ненулевого смещения. В частности, он может быть изменен до угла, где он выровнен параллельно главному направлению шасси, проходящем в направлении спереди назад, это будет такое положение относительно шасси, как показано в положении 4 (в центре фиг. 2a). Та же ось также может быть задана, как ось, при которой рычаг находится в нейтральном управляющем положении (см. положение 1) или ось, заданная направлением вил.
Угол смещения может быть изменен с использованием управляющего двигателя, который поворачивает колесо относительно шасси и/или рычага, или с использованием постепенного передвижения в сочетании с механизмом для выборочного отсоединения рычага от колеса и повторного соединения его с колесом, которые описаны ниже.
При достижении положения, показанного на фиг. 4, оператор находится у борта погрузчика с рычагом 20, смещенный от колеса 14 приблизительно на 90 градусов (может быть больше или меньше). Головка рычага снова снабжена элементами управления движением, которые при активации обеспечивают погрузчику возможность приводиться в движение прямо или обратно, включая тот случай, когда рычаг смещен. Таким образом, оператор включает прямое движение и передняя часть погрузчика и его груз 13 входят в пространство 11, где груз может быть выгружен.
Указанный угол не обязательно должен быть равен 90 градусам. Для того, чтобы погрузчик работал в пределах минимальной рабочей ширины прохода нужно вращать рычаг таким образом, чтобы его конец и его головка находились на одном уровне с самой задней точкой корпуса погрузчика или перед ним, как можно видеть в положении 3. В зависимости от конфигурации погрузчика минимальное значение вращения может быть существенно меньше или больше чем 90 градусов.
Ни в одной точке в положениях 4 и 5 рычаг не должен быть выпрямлен, а управление погрузчиком может быть отрегулировано и тонко настроено обычным способом посредством управления рычагом из стороны в сторону. Управляющий двигатель реагирует, как обычно, т.е. когда рычаг поворачивают вокруг его оси 15 (см. положение 3, фиг. 2b), скажем, на 5 градусов по часовой стрелке, управляющий двигатель будет поворачивать колесо 14 также на 5 градусов по часовой стрелке таким образом, что колесо продолжит следовать рычагу, но с различным угловым смещением от нормали, т.е. ненулевым углом, который в этом случае около 90 градусов.
Удаление поддона или груза из ряда выполняется наоборот. Пустой погрузчик маневрирует в ряд для зацепления и подбора этого груза, используя уже описанные этапы. Оператор и рычаг находятся у борта погрузчика (положение 5), погрузчик приводят в движение в обратном направлении к ряду за ним (положение 4). Управляемое колесо затем вращают в положение, где оно выровнено с рычагом, и снова это может быть выполнено вручную или с использованием управляющего двигателя, а управляющий двигатель может выравнивать с рычагом автоматически или выравнивать с рычагом под ручным управлением управляющего двигателя. Когда колесо и рычаг выровнены (положение 3), оператор может свободно маневрировать погрузчиком обратно в положение 2 и 1.
На фиг. 3a-3c показан тяговый двигатель, управляющий двигатель и связанные компоненты погрузчика. Показана только небольшая часть шасси 10 погрузчика, на которой смонтированы эти компоненты, но оставшаяся часть погрузчика описана выше.
Заднее колесо 14 приводят в прямом или обратном направлении посредством тягового двигателя 50 под управлением управляющих элементов (не показаны на фиг. 3a-3c, но показаны и описаны ниже в отношении фиг. 8) на головке 22 рычага, как описано ранее. Это хорошо известно. Хотя предпочтительно приводить заднее колесо, вместо этого могут приводить дополнительные или альтернативные колеса.
Управляющий угол заднего колеса 14 относительно шасси 10 регулируют при помощи вращения колеса 14 вокруг вертикальной оси - это производят при помощи управляющего двигателя 52. Управляющий двигатель предпочтительно является электрическим двигателем в показанном варианте осуществления, но в равной степени может быть гидравлическим, пневматическим или быть двигателем любого другого подходящего типа.
Датчик 54 определяет угловое положение рычага 20 относительно шасси 10. Контроллер 60 управляющего двигателя, чувствительный к датчику 54, активирует управляющий двигатель 52 таким образом, что заднее колесо 14 вращается вокруг вертикальной оси на тот же угол и в том же направлении, что и рычаг 20. Другими словами, управляющий угол заднего колеса 14 относительно шасси 10 увеличивается или уменьшается по мере того, как увеличивается или уменьшается угол рычага 20 относительно направления вдоль оси шасси 10, на ту же величину и в том же направлении вращения. Таким образом, поддерживается любое угловое смещение между рычагом 20 и задним колесом 14, которое было установлено ранее.
На фиг. 3a показан управляющий механизм, когда рычаг 20 находится на одной линии с задним колесом, т.е. угол смещения равен нулю, на фиг. 3b показан управляющий механизм, когда угол смещения между рычагом 20 и задним колесом 14 равен 45 градусов, а на фиг. 3c показан управляющий механизм, когда угол смещения равен 90 градусов.
Теперь обратимся к фиг. 4, на которой в виде структурной схемы показано схематическое изображение управляющих компонентов, показанных на фиг. 3a-3c. Колесо 14 вращают вокруг оси 26, когда приводят посредством тягового двигателя 50, используя обычное ручное управление (не показано). Управление по вертикальной оси производят при помощи управляющего двигателя 52 под управлением контроллера 60 управляющего двигателя. Как было описано ранее, угол рычага относительно шасси обеспечивают в качестве входного сигнала от датчика 54 угла рычага.
Датчик угла рычага может быть датчиком, чей вывод эффективен для обеспечения контроллеру управляющего двигателя возможности либо определения абсолютного угла для рычага относительно оси шасси, либо для определения изменений угла рычага по мере его перемещения вокруг оси вращения. Таким образом, в случае, если датчик угла рычага является вращающимся датчиком положения, он может быть такого типа, известного как абсолютный датчик положения или относительный датчик положения. Датчики могут быть цифровыми (например, механическими абсолютными датчиками положения), оптическими (такими как источник и детектор, которые разделены узорчатым диском), магнитными (например, использующими датчики Холла для восприятия полос намагниченного материала на диске) или аналоговыми (такими как синхронизатор, круговой датчик положения, вращающийся регулируемый дифференциальный преобразователь (RVDT, rotary variable differential transformer) или вращающийся потенциометр).
На управляющем двигателе обеспечен дополнительный угловой датчик 61, который воспринимает угол выводного вала этого двигателя (и, следовательно, угол управляемого колеса, смонтированного на этом валу) относительно корпуса двигателя (и, следовательно, шасси, на котором смонтирован этот корпус).
Также показано ручное управление, содержащее кнопку 63 «выравнивание с рычагом» и кнопку 65 «выравнивание с шасси», которые обычно обеспечены на головке рычага, например, в положении, показанном позиционным обозначением 40 на фиг. 3a-3c.
На фиг. 5 и 6 изображена работа контроллера управляющего двигателя в особенно предпочтительном варианте осуществления изобретения, который обеспечивает оператору возможность включения любого из двух режимов для автоматического выравнивания управляемого колеса либо с осью рычага в одном режиме, либо с главной осью шасси, проходящей в направлении спереди назад, в другом режиме (т.е. из положения 2 в положение 3 на фиг. 2b и наоборот, в соответствии с выбором оператором кнопок 63 или 65). На фиг. 5 показана работа контроллера при запуске системы и в режиме «выравнивание с рычагом», тогда как на фиг. 6 показана работа контроллера в режиме «выравнивания с шасси».
На фиг. 5 контроллер 60 запускается в нормальном режиме работы, этап 200, и по умолчанию контроллер будет удерживать управляемое колесо выровненным с рычагом, этап 202.
Контроллер сохранил во внутреннем или внешнем регистре или запоминающем устройстве, доступном для него (не показано), заранее определенное угловое смещение, которое изначально установлено равным нулю и всегда переустанавливается на ноль, когда контроллер возвращается в режим «выравнивания с рычагом», и блок-схема на фиг. 5 повторно запускается, этап 204. Это означает, что контроллер выполнен с возможностью удержания колеса 14 выровненным с рычагом 20, т.е. со смещением, равным нулю градусов, как показано, например, на фиг. 2a, положения 1, 2 и 3.
Контроллер после инициализации или переустановки сохраненного значения на ноль работает в цикле обратной связи. Этот цикл может быть прерван в любой точке оператором, нажимающим кнопку «выравнивание с шасси». Для целей изображения на блок-схеме это прерывание указано контроллером, в каждой итерации выполняющим проверку для того, чтобы видеть, сработала ли кнопка 65, этап 206. В фактической работе цикл обратной связи, использованный для нормального управления, может не явным образом проверять этот входной сигнал на этапе 206, поскольку он будет выполнен с возможностью приема прерывающего сигнала, а управляющий цикл обратной связи будет включать этапы 208, 210, 212 как будет описано ниже.
На этапе 208 принимают входной сигнал от датчика угла рычага и датчика угла колеса. В предпочтительном варианте осуществления изобретения каждый датчик будет возвращать величину напряжения, которое изменяется от минимума при одном крайнем положении вращения через среднее значение при нейтральном положении прямого хода вперед (рычага или колеса соответственно) до максимума при другом крайнем положении вращения. Как ранее было указано, этот тип датчиков является просто одной опцией, которая может быть использована. Цифровые или другие аналоговые датчики могут в равной степени обеспечивать входные сигналы в отношении абсолютного положения или величины вращения рычага или колеса относительно друг друга, шасси или любого другого компонента погрузчика или внешней среды. Эти входные сигналы от двух датчиков соответствующим образом калибруют относительно друг друга таким образом, что контроллер может интерпретировать каждый входной сигнал, как указывающий на угол, под которым рычаг или колесо расположено относительно шасси, и посредством простого сравнения или вычитания одного из другого.
На этапе 210 проводится это сравнение, а разность между углами сравнивают с сохраненным смещением, которое в данном случае равно нулю. Если рычаг и колесо смещены на нулевой угол, не нужно никаких действий, и процесс возвращается к этапу 206 и 208. Однако, если существует несоответствие, тогда на этапе 212 управляющий двигатель снабжают выводом для вращения колеса до тех пор, пока углы не совпадут.
Управление осуществляют посредством поворота оператором рычага вокруг его вертикальной оси. Это приведет к тому, что контроллер обнаружит и скорректирует несоответствие между обнаруженным углом рычага и углом колеса. Поскольку процесс работает в цикле обратной связи, колесо будет близко следовать рычагу, за исключением случаев вынужденного перемещения рычага, и оператору не следует обращать внимание на любое ощутимое запаздывание.
В соответствии с нормальным рабочим режимом и когда активна функция выравнивания с рычагом, управляющий двигатель вращает колесо для «следования» рычагу под руководством контроллера управляющего двигателя. Этот контроллер непрерывно пытается поддерживать заранее определенное смещение, равное нулю градусов, между колесом и рычагом.
Теперь допустим, что рычаг выровнен с колесом, т.е. заранее определенный угол смещения в запоминающем устройстве равен нулю, и посмотрим, что произойдет, когда оператор нажмет на кнопку 65 «выравнивание с шасси», как происходит, когда оператор пытается вращать колесо таким образом, чтобы оно больше не было выровнено с рычагом (положение 3), но вместо того было бы выровнено с шасси (положение 4). Как указано на этапе 206 на фиг. 6, это прерывает нормальную управляющую работу, и контроллер вместо этого начинает реализовывать процесс на фиг. 6.
На фиг. 6 активен режим выравнивания с шасси, этап 214. Хотя на фиг. 6 это не показано, до реализации работы в режиме выравнивания с шасси может быть произведена проверка на безопасность. Если погрузчик перемещается со скоростью, когда было бы небезопасно изменить угол управляемого колеса (это может быть функцией скорости двигателя и, опционально, текущего угла рычага), то команда для выравнивания с шасси может быть проигнорирована, а процесс может вернуться к фиг. 5. Однако, предположим, что погрузчик движется с безопасной скоростью, т.е. низкой скоростью или остановлен, тогда контроллер сначала повторно выровняет колесо с осью шасси, а потом разрешит нормальное управление, но со смещением рычага от колеса.
Таким образом, на этапе 216 контроллер обнаруживает угол колеса (относительно шасси). В большинстве случаев, когда это происходит, колесо будет теперь выровнено с рычагом, а рычаг будет под ненулевым углом к главной оси шасси, проходящей в направлении спереди назад. Контроллер повторно выравнивает колесо посредством включения управляющего двигателя до тех пор, пока входной сигнал от датчика угла колеса не будет указывать на нулевой угол относительно шасси, этап 218. На этом этапе рычаг может остаться в том же положении или может быть перемещен оператором на более малое или большое значение. В любом случае, как только колесо и ось шасси выровнены, обнаруживают текущий угол рычага относительно шасси, этап 220, с намерением теперь «заблокировать» управление колеса относительно рычага с этим смещением. Обнаруженный угол (или значение, такое как напряжение или цифровая величина, указывающая на угол) сохраняют в запоминающем устройстве или регистре, доступном для контроллера, этап 222. Это значение означает смещение рычага относительно как шасси, так и колеса, при условии, что два последних выровнены.
Как только это достигнуто, контроллер фактически работает тем же образом, как было описано в отношении фиг. 5, этапы 208, 210, 212, но с таким исключением, что вместо того, что контроллер использует обратную связь для обеспечения того, что колесо следует рычагу со смещением, равным нулю градусов, этот контроллер в дополнительной операции на фиг. 6 будет действовать для обеспечения того, что колесо следует управляющему перемещению рычага с тем же постоянным смещением, которое было, когда управляющий двигатель выровнял колесо с шасси на этапе 218.
Как на фиг. 5, работа контроллера может быть прервана посредством обнаружения команды «выравнивание с рычагом», этап 224. Кроме того, что не показано для ясности, работа контроллера также может быть прервана посредством получения дополнительной команды «выравнивание с шасси». Оператор, выровняв колесо с шасси и маневрируя погрузчиком, может хотеть возобновить обычное управление, в этом случае будет использована команда выравнивания с рычагом, или может хотеть выровнять колесо с шасси с новым смещением, возможно, в той или иной степени предельным, или со смещением рычага в другую сторону от корпуса погрузчика. Следовательно, команда «выравнивание с шасси» доступна для повторного выравнивания колеса, даже если погрузчик может уже работать в режиме выравнивания с шасси.
Предположим, что на этапе 224 не было принято такого прерывания, управляющая работа продолжается посредством обнаружения углов как рычага, так и колеса, относительно шасси, этап 226.
Посредством сравнения и вычитания контроллер определяет угол смещения между рычагом и колесом и проверяет, этап 228, является ли смещение таким, как требуется, т.е. равно ли заранее определенному значению смещения, сохраненному в запоминающем устройстве на этапе 222. Если это так, то не нужно никакого управляющего вывода, а процесс возвращается на этап 224. Однако, если здесь существует расхождение, то включают управляющий двигатель до тех пор, пока не будет восстановлено или достигнуто требуемое смещение, этап 230.
Если на этапе 224 контроллер обнаруживает, что снова был выбран режим выравнивания с рычагом, процесс перемещается обратно к фиг. 5. Это имеет результатом, что текущий угол смещения, сохраненный в запоминающем устройстве, перезаписывается на смещение, равное нулю градусов (фиг. 5, этап 204), а затем контроллер в соответствии с нормальной управляющей работой (этапы 208, 210, 212) исправляет несоответствие между обнаруженным смещением между колесом и рычагом и требуемым смещением, равным нулю.
Специалистам в области техники будет понятно, что управляющая работа на фиг. 5 и 6 после коррекции несоответствия, как описано непосредственно выше на фиг. 5, или после выравнивания с шасси на фиг. 6, работает в точности тем же образом: есть требуемое значение смещения, которое пытаются поддерживать и отвечать на входной сигнал рычага посредством перемещения колеса для поддержания требуемого заранее определенного смещения. Когда действует таким образом, говорят, что находится в нормальном режиме работы, тогда как при изменении угла смещения на ноль относительно рычага или шасси, говорят, что находится в режиме работы повторного выравнивания.
Теперь со ссылкой на фиг. 7-12 будет описан дополнительный вариант осуществления изобретения. Вариант осуществления на фиг. 7-12, описанный ниже, и вариант осуществления на фиг. 2-6, описанный выше, объединены тем фактом, что в нормальном режиме работы контроллер управляет управляющим двигателем для поддержания заранее определенного углового смещения между рычагом и колесом, и что угловое смещение между рычагом и управляемым колесом может быть отрегулировано, а отрегулированное угловое смещение впоследствии использовано в качестве заранее определенного углового смещения.
Хотя регулировка предпочтительно происходит автоматически, как описано выше в отношении фиг. 4, 5 и 6 и ниже в отношении фиг. 11, или полуавтоматически (т.е. с питаемым энергией управлением, но под ручным управлением), как описано ниже в отношении фиг. 10, это также может происходить вручную, как описано ниже в отношении фиг. 7 и 9.
Обратимся к фиг. 7a-7e, альтернативный вариант осуществления управляемого пешим водителем вилочного погрузчика содержит рычаг 20, который может быть выборочно отсоединен от заднего колеса 14 и повторно соединен с ним. Это обеспечивает возможность выборочного вращения рычага 20 независимо от заднего колеса 14 для обеспечения возможности закрепления рычага в различных угловых положениях относительно заднего колеса. Как видно на фиг. 3a-3e, головка 22 рычага имеет нажимную кнопку (которая также может быть расположена в положении 40, на которую будут ссылаться, как на нажимную кнопку 40), которая при нажатии на нее отсоединяет рычаг 20 от заднего колеса 14 и, когда удерживается в нажатом положении, обеспечивает возможность вращения рычага под любым выбранным углом (в пределах конструкционных ограничений этого погрузчика), тогда как управляющий угол заднего колеса 14 относительно шасси 10 погрузчика остается закрепленным. Когда оператор 24 переместил рычаг на требуемое угловое смещение от заднего колеса 14, кнопку 40 освобождают, а рычаг 20 повторно соединяется с задним колесом. От этого момента и до тех пор, пока кнопка 40 не будет в следующий раз нажата, а также как было описано ранее, вращение рычага 20 на любой угол в любом направлении будет вращать заднее колесо 14 на тот же угол и в том же направлении, в то же время удерживая выбранное угловое смещение.
Более сложная управляющая панель для использования на головке рычага описана ниже в отношении фиг. 12. Следует понимать, что нажимная кнопка, или любой другой управляющий интерфейс, не обязательно должен быть расположен на головке рычага, но для удобства оператора предпочтительно располагать его в легкой доступности для оператора, следовательно, головка рычага является предпочтительной.
На фиг. 7a показан вилочный погрузчик, расположенный под прямым углом к ряду 32 размещенных на поддонах товаров, при этом заднее колесо 14 находится в продольно-поперечном положении на одной линии с рычагом 20, который проходит прямо к задней части. Это эквивалентно ситуации, показанной на фиг. 1b и, как описано, управляющее пространство S напрасно расходует пространство для хранения.
На фиг. 7b, оператор 24 отсоединил рычаг 20 от заднего колеса 14 посредством нажатия на кнопку 40, и, удерживая нажатой кнопку 40, переместил рычаг в направлении по часовой стрелке приблизительно на 90 градусов. Заднее колесо 14 остается своей первоначальной продольно-поперечной ориентации.
Далее, на фиг. 7с оператор двигает погрузчик назад по направлению к ряду 32, заднее колесо 14 остается в продольно-поперечной ориентации. Это перемещение завершается работой управляющих элементов (не показаны на фиг. 3a-3e, но видны на управляющей панели на фиг. 12, описанной ниже) на головке рычага для активации приводного двигателя, приводящего заднее колесо 14. Теперь погрузчик может более близко приблизиться к ряду 32, поскольку рычаг 20 свободен с одной стороны, требуя намного меньшего управляющего пространства. Во время движения погрузчика назад рычаг 20 может оставаться отсоединенным от заднего колеса 14 (тяговое управление работает независимо от того, соединены или нет рычаг и заднее колесо), или он может быть повторно соединен с задним колесом 14 посредством освобождения кнопки 40.
Для возвращения к нормальной управляющей конфигурации (т.е. заднее колесо находится на одной линии с рычагом), рычаг «постепенно передвигается» взад и вперед на небольшой угол, при этом кнопка 40 удерживается нажатой во время перемещений в направлении против часовой стрелки, когда рычаг отсоединен, и освобождается во время перемещений в направлении по часовой стрелке, когда рычаг соединен с задним колесом 14. Это постепенно приведет заднее колесо 14 в одну линию с рычагом 20, фиг. 7e, после чего может быть возобновлено нормальное управление погрузчиком, фиг. 7f.
Хотя на чертежах показано, что рычаг 20 смещен в направлении по часовой стрелке относительно заднего колеса 14, допустимо смещение либо в направлении по часовой, либо против часовой стрелки.
Обратимся теперь к блок-схемам на фиг. 8-11 и управляющей схеме на фиг. 12, на которых показаны дополнительные подробности работы альтернативного контроллера 60 управляющего двигателя. На фиг. 8-11 показаны в виде блок-схем запрограммированные операции контроллера управляющего двигателя, который можно видеть на фиг. 12, в различных режимах работы.
Как видно на фиг. 12, контроллер 60 управляющего двигателя соединен с управляющим двигателем 52 таким образом, что подходящие управляющие сигналы могут быть выведены от контроллера 60 на управляющий двигатель 52 для вращения на управляющий угол колеса 14 относительно рычага или шасси.
Управляющая панель 62, предпочтительно обеспеченная на головке рычага (не показана на фиг. 12), содержит четыре управляющих области, а именно, область для управления тяговым двигателем, область 70 для управления отсоединением/повторным соединением; область 74 для ручного управления и область 78 для управления автоматическим выравниванием.
Область 64 для управления тяговым двигателем снабжена прямой и обратной управляющими кнопками 66, 68 и непосредственно соединена с тяговым двигателем. Когда кнопки 66, 68 нажаты, управляющие сигналы отправляются на тяговый двигатель для приведения колеса в действие вокруг его оси 26 в прямом или обратном направлении, соответственно. Хотя показано, что управление тяговым двигателем является односкоростным управлением, специалистам в области техники известен управляющий механизм, обеспечивающий возможность ступенчатого скоростного контроля, например, может быть использована круговая шкала, обеспечивающая возможность любой степени скорости между полной скоростью в прямом направлении и полной скоростью в обратном направлении, или может быть использован низкоскоростной рычажный переключатель в комбинации с простыми прямыми/обратными управляющими кнопками такого типа, который показан на фиг. 12, для обеспечения возможности более медленного маневрирования в узких пространствах.
Дополнительно обратимся к фиг. 8, где описан «нормальный» режим работы, при котором оператор просто работает с областью 64 для управления тяговым двигателем, а не с дополнительными управляющими областями 70, 74, 78.
На этапе 100 погрузчик находится в нормальном режиме работы. Он остается в этом режиме, обеспечивая, что режим отсоединения не активирован (решение 102, приводящее к фиг. 9); режим ручного управления не активирован (решение 104, приводящее к фиг. 10); и режим автоматического выравнивания не активирован (решение 106, приводящее к фиг. 11). В нормальном режиме работы оператор использует прямую и обратную кнопки для приведения в движение погрузчика в прямом и обратном направлении. Управление завершают посредством поворота рычага вокруг его вертикальной оси и, как было описано ранее, угловой датчик определяет относительный угол между приводным колесом (вокруг своей вертикальной оси) и рычагом. Этот сигнал принимают на этапе 108.
Регистр или область памяти (не показаны), обеспеченный (обеспеченная) в контроллере или доступный (доступная) для него, сохраняет «требуемый угол» для сигнала датчика. В большинстве случаев и при инициализации системы требуемый угол равен нулю, т.е. колесо выровнено, и любое перемещение рычага вызовет требование вращения колеса вокруг его вертикальной оси для восстановления выравнивания и для возврата к требуемому углу, равному нулю.
Таким образом, работает цикл обратной связи, в котором на этапе 108 принимают сигнал датчика, выполняется проверка, решение 110, является ли обнаруженный угол тем же, что и требуемый угол, сохраненный в запоминающем устройстве. Если так, этап 112, то нет никакого вывода на управляющий двигатель, и процесс обратной связи возвращается на этап 108.
Однако, если отмечено расхождение, т.е. рычаг переместился на различный угол, чем это требуется, то обеспечивают вывод на управляющий двигатель на этапе 114 для вращения колеса вокруг его вертикальной оси до тех пор, пока не будет снова восстановлен требуемый угол.
Как было описано ранее, рычаг может быть отсоединен от колеса посредством нажатия кнопки 40 в варианте осуществления, показанном на фиг. 3a-3c или на фиг. 12, если обратиться к области 70 для управления отсоединением/повторным соединением, она снабжена одной кнопкой 72 включения/выключения, которая при нажатии на нее аналогичным образом отсоединяет рычаг от колеса, и при ее освобождении повторно соединяет рычаг с колесом. Такая кнопка 72 непосредственно заменяет кнопку 40, показанную на фиг. 3a-3c.
Обратимся теперь к фиг. 9, когда кнопка 72 нажата, это приводит к сигналу «отсоединения», принимаемому контроллером 60, этап 116. Затем контроллер отменяет нормальный режим (т.е. работу, как показано на фиг. 8), этап 118, с таким результатом, что более недоступны функциональные возможности автоматического выравнивания и ручного управления, этап 120; нет никакого дополнительного вывода на управляющий двигатель, этап 122; а входной сигнал от датчика управляющего угла игнорируется, этап 124 (или датчик временно деактивирован до тех пор, пока контроллер не войдет повторно в нормальный режим). Теперь погрузчик находится в режиме отсоединения.
В этом режиме до тех пор, пока деактивирован сигнал отсоединения, или принят сигнал повторного соединения - это зависит от конструкции и механизма, использованных для кнопки повторного соединения - рычаг выполнен с возможностью вращения независимо от колеса. В этом режиме управление тягового двигателя остается все еще активным и неизменным. Как описано ранее, таким образом, рычаг может быть смещен относительно колеса, и не делается никаких попыток повторно выровнять колесо с рычагом до тех пор, пока они отсоединены.
Как только отсоединение деактивировано, или получен сигнал повторного соединения, этап 126, сигнал датчика снова принимают и обрабатывают, этап 128. В большинстве случаев рычаг будет смещен во время режима отсоединения и больше не будет находиться под требуемым углом. Так, например, если изначальный требуемый угол был равен нулю, когда были выровнены рычаг и колесо, а рычаг затем отсоединили и вращали на 90 градусов против часовой стрелки из положения выравнивания с колесом, датчик сообщит о вращении колеса на угол, равный 90 градусов, по часовой стрелке относительно рычага. Это изначальное указание на новое угловое соотношение между колесом и рычагом используют для переустановки требуемого угла, сохраненного в запоминающем устройстве, на этот новый угол, этап 130, а погрузчик затем возвращается в нормальный режим работы, этап 132.
С этого момента нормальный режим работы возвращается к процессу на фиг. 8, как описано ранее, но при этом требуемый угол теперь установлен на 90 градусов таким образом, что цикл обратной связи между датчиком, контроллером и двигателем теперь стремится поддерживать смещение под тем же углом, равным 90 градусов. Другими словами, рычаг и колесо теперь «заблокированы» под 90 градусов от выравнивания.
Когда управление таково, что рычаг «постепенно передвигается» взад и вперед на небольшой угол, как описано ранее, контроллер неоднократно перебрасывается между нормальным режимом на фиг. 8 (кнопка освобождения, а рычаг заблокирован с колесом) и режимом отсоединения на фиг. 9 (рычаг свободен и вращается независимо от колеса), при этом требуемый угол переустанавливают на новое угловое соотношение каждый раз, когда освобождают кнопку.
Теперь обратимся к фиг. 10, можно увидеть, что, кроме области 74 для ручного управления, на фиг. 12 обеспечен рычажный переключатель 76, который отклонен в нейтральное положение, как показано на фиг. 12, но его могут вращать по часовой стрелке или против часовой стрелки для активации ручного управления колесом 14 (аналогично действию поворота ключа в любом направлении в пружинном замке). Когда рычаг переключателя переключен в любом направлении, сигнал ручного управления (по часовой стрелке или против часовой стрелки, в зависимости от того, как переключен рычаг переключателя) принимают на контроллере, этап 134.
Контроллер отменяет нормальный режим, этап 136, и деактивирует функциональные возможности автоматического выравнивания и ручного управления для управляющей панели, этап 138. Теперь погрузчик находится в режиме ручного управления.
В этом режиме контроллер управляющего двигателя выводит левый и правый (или по часовой стрелке и против часовой стрелки) управляющие сигналы на управляющий двигатель до тех пор, пока принимают сигналы ручного управления от рычажного переключателя 76. Следует понимать, что вместо простого рычажного переключателя, управляющего колеса может быть использованы управляющие элементы в виде левых/правых рукояток или управляющие элементы любого другого известного и подходящего типа для независимого вращения колеса вокруг его вертикальной оси.
Когда сигналы ручного управления прекращены, этап 142, принимают показание датчика угла, этап 144, а требуемый угол переустанавливают на новое угловое соотношение между рычагом и колесом, этап 146. Затем погрузчик возвращают в нормальный режим, этап 148.
Используя такой механизм, приводное колесо могут вращать на новый угол без постепенного передвижения или манипулирования погрузчиком. Это полезно, например, в повторном выравнивании колеса с рычагом. Снова тяговое управление полностью активно в режиме ручного управления.
На фиг. 11 показана функциональность области 78 управления автоматическим выравниванием, показанной на фиг. 12. Область 78 управления автоматическим выравниванием снабжена тремя кнопками, а именно кнопкой 80 «выравнивание с рычагом», кнопкой 82 «90 градусов вправо» и кнопкой 84 «90 градусов влево». Оператор может использовать эти кнопки для выравнивания колеса с рычагом автоматически или при смещении на 90 градусов влево или вправо. Очевидно, можно обеспечить дополнительные или альтернативные управляющие элементы, если потребуется, для неоднократного смещения рычага от колеса под различными углами, такими как 45 градусов, 60 градусов или 80 градусов. Можно дополнительно или альтернативно поместить круговую шкалу или циферблат с угловыми отметками и обеспечить оператору возможность выбора угла из непрерывного диапазона или посредством переключения вращающейся ручки в любое из нескольких заранее установленных угловых положений.
На фиг. 11 погрузчик находится в нормальном режиме, этап 110, когда одна из трех кнопок 80, 82, 84 (фиг. 12) нажата, в результате чего от управляющей панели принимают сигнал автоматического выравнивания, этап 150. Принимают различный сигнал, в зависимости от того, какая из указанных трех кнопок выбрана оператором.
Контроллер управляющего двигателя отменяет нормальный режим, этап 152, и деактивирует функции отсоединения и ручного управления, описанные выше, этап 154. Затем, в зависимости от того, какая кнопка была выбрана, решение 156, возникает различный результат. (В действительности, запрограммированная или аппаратная логика, согласно которой работает контроллер, может не реализовывать решение в этот момент, но вместо того будет иметь три параллельные функции для указанных трех кнопок. Конечно, любая из блок-схем, показанных на фиг. 8-11, может быть реализована несколькими альтернативными способами, а конкретные блок-схемы описывают наилучший известный способ реализации различных функций, который системный разработчик может выбрать для использования, модификации или не включать полностью в данный продукт).
Если выбрана кнопка «выравнивание с рычагом», этап 158, контроллер переустанавливает «требуемый угол», сохраненный в запоминающем устройстве или регистре, назначенного для этой цели, на значение, соответствующее углу, равному нулю градусов. Аналогично, если была выбрана кнопка «90 градусов вправо», этап 160, или кнопка «90 градусов влево», этап 162, требуемый угол устанавливают в соответствии со значением, приравненным к смещению колеса на выбранный угол. (Какую терминологию использовать, «влево/вправо», «по часовой стрелке/против часовой стрелки», графическое указание на угол или любую другую терминологию, является предпочтением системного разработчика, а также выбором для удобства, а также направление вращения смещения рычага или колеса.)
В любом случае, после установки требуемого угла на этапах 158, 160, 162 на подходящее значение для соответствия с требуемым смещением, выбранным оператором, контроллер затем возвращается в нормальный режим, этап 164.
Предположим, что рычаг еще не находится на установленном смещении (например, допустим, что рычаг смещен от направления колеса на 10 градусов, когда оператор выбирает «выравнивание с рычагом»), действием нормального режима работы будет следовать этапам 108, 110 и 114, как описано в отношении фиг. 8 для вывода сигнала на управляющий двигатель до тех пор, пока воспринятый угол не будет соответствовать углу, сохраненному в запоминающем устройстве. Это приводит к блок-схеме, изображенной на фиг. 11, используемой для переустановки требуемого угла, и к блок-схеме, показанной на фиг. 8, затем выполняющую управляющую коррекцию до тех пор, пока рычаг не будет выровнен с колесом (или смещен на 90 градусов и т.п.).
Настоящее изобретение не ограничено вариантами его осуществления, описанными в настоящем документе, которые могут быть модифицированы или изменены без отклонения от объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО ТРАНСПОРТНОГО СРЕДСТВА ПОД ТРЕБУЕМЫМ УГЛОМ (ВАРИАНТЫ) | 2015 |
|
RU2684818C2 |
| УСТРОЙСТВО И СПОСОБ ВОСПРИЯТИЯ ПОЛОЖЕНИЯ, КОРРЕКЦИИ И ИЗМЕНЕНИЯ РЕЖИМА В СИСТЕМЕ РУЛЕВОГО УПРАВЛЕНИЯ НЕСКОЛЬКИМИ МОСТАМИ | 2018 |
|
RU2756857C2 |
| ВЫРАВНИВАЮЩАЯ СИСТЕМА С ВЕКТОРНЫМ УПРАВЛЕНИЕМ ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2007 |
|
RU2424939C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| СИСТЕМА СИДЕНЬЯ ДЛЯ СНЕГОУПЛОТНИТЕЛЬНОЙ МАШИНЫ | 2014 |
|
RU2682201C1 |
| Система управления ходом погрузчика и способ ее управления, погрузчик и контроллер транспортного средства | 2022 |
|
RU2797703C1 |
| ПОГРУЗОЧНАЯ МАШИНА И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2016 |
|
RU2720393C2 |
| ГОРНАЯ МАШИНА И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2016 |
|
RU2732674C2 |
| РОБОТИЗИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ТРАКТОР-ВЕЗДЕХОД | 2022 |
|
RU2783560C1 |
| УПРАВЛЕНИЕ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ | 2018 |
|
RU2756412C2 |







Моторизированный погрузчик с рычагом, такой как переносчик поддонов или вилочный погрузчик, содержит управляемое рычагом колесо (14), которое управляется посредством двигателя, имеющего соответствующий контроллер управляющего двигателя. Контроллер управляющего двигателя в нормальном режиме работы обнаруживает перемещение рычага по мере его вращения относительно шасси для управления погрузчиком и выводит управляющие сигналы для побуждения управляющего двигателя управлять указанным колесом таким образом, что оно следует углу рычага с закрепленным заранее определенным смещением (которое может быть нулевым и ненулевым). В режиме работы повторного выравнивания контроллер может изменять указанное заранее определенное угловое смещение, а контроллер предпочтительно может выравнивать колесо с рычагом или с осью шасси. Погрузчиком можно маневрировать в узком пространстве более легко, при этом оператор и рычаг смещены в отношении стороны погрузчика. Рычаг также может быть смещен от колеса вручную посредством отсоединения рычага и колеса, тем самым изменяя указанное заранее определенное смещение для последующей работы. Изобретение обеспечивает повышение маневренности погрузчика. 2 н. и 18 з.п. ф-лы, 21 ил.
1. Моторизированный погрузчик с рычагом, содержащий:
(a) шасси, имеющее множество взаимодействующих с поверхностью земли колес, по меньшей мере одно из которых является управляемым колесом для управления указанным погрузчиком;
(b) приводной двигатель для приведения в движение по меньшей мере одного из указанных колес для перемещения погрузчика по поверхности земли;
(c) рычаг, который соединен с возможностью вращения с шасси и который может качаться из стороны в сторону для управления погрузчиком;
(d) управляющий двигатель для изменения угла управляемого колеса;
(e) контроллер управляющего двигателя, который в нормальном режиме работы принимает в качестве входного сигнала показание угла рычага и в ответ на это выводит управляющий сигнал на управляющий двигатель для изменения угла управляемого колеса таким образом, что угол между рычагом и указанным управляемым колесом поддерживает заранее определенное угловое смещение;
причем угловое смещение между рычагом и указанным управляемым колесом может быть отрегулировано, а отрегулированное угловое смещение затем использовано в качестве указанного заранее определенного углового смещения;
причем регулировку углового смещения выполняют при помощи контроллера управляющего двигателя в режиме работы повторного выравнивания, в котором контроллер управляющего двигателя выводит управляющий сигнал на управляющий двигатель для поворота указанного колеса на различную величину углового смещения.
2. Моторизированный погрузчик с рычагом по п. 1, в котором контроллер управляющего двигателя выполнен с возможностью в режиме работы повторного выравнивания осуществлять автоматическое выравнивание управляемого колеса параллельно любой из двух главных осей, представляющих интерес, а именно оси рычага и главной оси шасси погрузчика.
3. Моторизированный погрузчик с рычагом по п. 1 или 2, в котором контроллер управляющего двигателя выполнен с возможностью изменения в режиме работы повторного выравнивания указанного заранее определенного угла между (i) нулевым углом рычага, при котором колесо выровнено параллельно этому рычагу, и (ii) нулевым углом шасси, при котором колесо выровнено параллельно оси шасси и смещено от рычага на тот же угол, на который рычаг смещен от шасси, во время режима работы повторного выравнивания.
4. Моторизированный погрузчик с рычагом по п. 2, в котором указанная ось шасси выбрана из оси, заданной осью рычага, когда рычаг находится в нейтральном управляющем положении; оси погрузчика, проходящей в направлении спереди назад; оси погрузчика, проходящей в направлении слева направо, и когда погрузчик снабжен подъемными вилами, оси, заданной этими подъемными вилами.
5. Моторизированный погрузчик с рычагом по п. 1 или 2, дополнительно содержащий по меньшей мере один элемент ручного управления, который при активации включает режим работы повторного выравнивания.
6. Моторизированный погрузчик с рычагом по п. 5, в котором указанные элементы ручного управления могут выбирать по меньшей мере между двумя состояниями, а именно (i) нулевым углом рычага, при котором колесо выровнено параллельно этому рычагу, и (ii) нулевым углом шасси, при котором колесо выровнено параллельно оси шасси и смещено от рычага на тот же угол, что и рычаг смещен от шасси, во время режима работы повторного выравнивания.
7. Моторизированный погрузчик с рычагом по п. 5, в котором рычаг имеет головку рычага на своем свободном конце, а головка рычага снабжена указанными элементами ручного управления.
8. Моторизированный погрузчик с рычагом по любому из пп. 1, 2, 4, 6, в котором, когда контроллер управляющего двигателя находится в режиме работы повторного выравнивания, рычаг отсоединен от управляемого колеса.
9. Моторизированный погрузчик с рычагом по любому из пп. 1, 2, 4, 6, в котором контроллер управляющего двигателя выполнен с возможностью автоматического возвращения из режима повторного выравнивания в нормальный режим работы после завершения операции по управлению колесом таким образом, чтобы изменять указанное заранее определенное угловое смещение, а также в котором при возвращении в нормальный режим из режима повторного выравнивания указанное заранее определенное значение обновляют в соответствии со смещением, достигнутым в режиме повторного выравнивания.
10. Моторизированный погрузчик с рычагом по любому из пп. 1, 2, 4, 6, в котором контроллер управляющего двигателя принимает в качестве входного сигнала показание угла рычага относительно по меньшей мере одного из указанных шасси, управляемого колеса или управляющего двигателя.
11. Моторизированный погрузчик с рычагом по любому из пп. 1, 2, 4, 6, дополнительно содержащий систему угловых датчиков, состоящую по меньшей мере из одного датчика, которая обнаруживает и выводит показание или показания относительного угла между двумя или большим количеством из указанных рычага, управляемого колеса, управляющего двигателя и шасси.
12. Моторизированный погрузчик с рычагом по п. 11, в котором показание или показания, выведенные системой угловых датчиков, обеспечивает (обеспечивают) контроллер управляющего двигателя информацией для определения, во время режима работы повторного выравнивания, угла между рычагом и управляемым колесом и/или угла между управляемым колесом и шасси.
13. Моторизированный погрузчик с рычагом по п. 11, в котором, когда контроллер управляющего двигателя выполнен с возможностью изменения указанного заранее определенного угла на нулевой угол рычага, он принимает в качестве входного сигнала от системы угловых датчиков информацию для определения угла между рычагом и управляемым колесом, а когда контроллер управляющего двигателя выполнен с возможностью изменения указанного заранее определенного угла на нулевой угол шасси, он принимает в качестве входного сигнала от системы угловых датчиков информацию для определения угла между управляемым колесом и шасси.
14. Моторизированный погрузчик с рычагом по любому из пп. 1, 2, 4, 6, 12, дополнительно содержащий запоминающее устройство, которое доступно для контроллера управляющего двигателя и в котором сохраняют показание указанного заранее определенного угла смещения.
15. Моторизированный погрузчик с рычагом по пп. 1, 2, 4, 6, 12, в котором указанный моторизированный погрузчик с рычагом выбран из вилочного погрузчика, переносчика поддонов и комплектовщика заказов.
16. Моторизированный погрузчик с рычагом по любому из пп. 1, 2, 4, 6, 12, в котором шасси поддерживает рычаг на заднем конце, указанный погрузчик дополнительно содержит вилы, расположенные на переднем конце шасси, а управляемое колесо находится на указанном заднем конце.
17. Моторизированный погрузчик с рычагом по любому из пп. 1, 2, 4, 6, 12, в котором указанный погрузчик является трехколесным погрузчиком с двумя передними колесами, которые являются неприводными и неуправляемыми, и с одним приводным управляемым задним колесом, которое расположено главным образом под осью вращения рычага.
18. Способ маневрирования моторизированным погрузчиком с рычагом, включающий следующие этапы:
(a) этап движения погрузчика в проходе, при этом рычаг по существу выровнен с управляемым колесом погрузчика;
(b) этап размещения переднего конца погрузчика вплотную к пространству, в котором погрузчик должен маневрировать по этому проходу;
(c) этап регулировки углового смещения между рычагом и управляемым колесом таким образом, что управляемое колесо смещено от линии рычага более чем на 45 градусов; причем регулировка углового смещения вызвана поворотом управляемого колеса на различную величину углового смещения, и
(d) этап движения передней части погрузчика в указанное пространство с поддержанием указанного смещения, составляющего больше чем 45 градусов, между управляемым колесом и рычагом.
19. Способ по п. 18, в котором на этапах (а) и (b) указанное колесо выровнено с линией рычага с погрешностью 5 градусов или меньше.
20. Способ по п. 19, в котором на этапах (с) и (d) управляемое колесо смещено от линии рычага на 60 градусов или больше, более предпочтительно на 80 градусов или больше.
| Колосоуборка | 1923 |
|
SU2009A1 |
| DE102010016470 А1, 20.10.2011 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 2011231059 A1,22.09.2011 | |||
| ПРОМЫШЛЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2397885C2 |

