Область техники
Изобретение относится к системе управления ходом погрузчика и способу ее управления, погрузчику, контроллеру транспортного средства, и принадлежит области техники погрузчика.
Уровень техники
При управлении традиционным погрузчиком водитель использует педаль акселератора (педаль газа) для управления скоростью вращения и выходной мощностью двигателя, мощность через двигатель, преобразователь крутящего момента, коробку передач и ведущую ось, передается на шины, реализуя движение транспортного средства. Когда угол нажатия на педаль акселератора увеличивается, скорость вращения двигателя повышается, выходной крутящий момент увеличивается, скорость хода и мощность транспортного средства повышаются; при подъеме педали акселератора скорость вращения двигателя снижается, выходной крутящий момент уменьшается, скорость хода и мощность транспортного средства снижаются.
Использование педали акселератора для управления скоростью вращения двигателя является решением для большинства погрузчиков. Недостатками этого решения являются:
1. Большой расход топлива, нестабильная скорость вращения двигателя, сильная зависимость от нагрузки. При увеличении нагрузки скорость вращения сильно снижается, а при уменьшении нагрузки скорость вращения вновь увеличивается до некоторой степени. Нестабильность скорости вращения затрудняет непрерывность работы двигателя в области высокого КПД, что приводит к большому расходу топлива;
2. Нельзя гарантировать, что двигатель всегда будет работать на номинальной скорости вращения (или скорости вращения, соответствующей точке максимальной мощности), выходная мощность, соответствующая номинальной скорости вращения, велика, однако выходной крутящий момент мал, и для преодоления нагрузки, необходим большой крутящий момент, при этом мощность, соответствующая большому крутящему моменту, не является максимальным значением и меньше номинальной мощности, что затрудняет непрерывное поддержание максимальной мощности (или номинальной мощности) двигателя. Другими словами, постоянно отбирать максимальную мощность двигателя для работы транспортного средства является затруднительным, что приводит к снижению экономической эффективности.
Суть изобретения
Целью настоящего изобретения является преодоление недостатков предшествующего уровня техники и предоставление системы управления ходом погрузчика и способа ее управления, контроллера погрузчика и транспортного средства, для реализации управления двигателем для работы в заданной области скорости вращения в соответствии с режимом вывода селекторного переключателя, а также управления выходной мощностью тягового двигателя в соответствии с сигналом угла педали акселератора и сигналом переключения передач рычага и преобразования электрической энергии генератора для приведения в движение транспортного средства, чтобы снизить расход топлива и повысить экономичность.
Для достижения вышеуказанных целей настоящее изобретение реализуется с использованием следующих технических решений:
в первом аспекте настоящее изобретение обеспечивает систему управления ходом погрузчика, которая включает в себя:
двигатель;
генератор для передачи электрической энергии на приводной механизм, и подключенный к двигателю через входной вал;
контроллер для электрического подключения педали акселератора и селекторного переключателя;
приводной механизм, включающий тяговый двигатель и редуктор, подключенный к выходному валу тягового двигателя, вышеупомянутый генератор, электрически подключенный к тяговому двигателю через контроллер, для подачи электрической энергии тяговому двигателю;
вышеупомянутый контроллер управляет выходной мощностью тягового двигателя в соответствии с сигналом угла педали акселератора и управляет двигателем, чтобы он работал в заданном диапазоне скорости вращения, в соответствии с режимом ввода селекторного переключателя.
Предпочтительно, чтобы вышеупомянутый контроллер включал в себя:
центральный контроллер, связанный с ECU двигателя коммуникационным соединением;
контроллер генератора, связанный с центральным контроллером коммуникационным соединением, вышеупомянутый контроллер генератора также электрически подключен к генератору;
контроллер тягового двигателя, связанный с центральным контроллером коммуникационным соединением, вышеупомянутый контроллер тягового двигателя также электрически подключен к тяговому двигателю.
Предпочтительно, чтобы он также включал в себя: рычаг, связанный с центральным контроллером коммуникационным соединением, для управления направлением движения и состоянием движения приводного механизма.
Предпочтительно, чтобы было четыре тяговых двигателя, каждый из которых был индивидуально оснащен контроллером тягового двигателя.
Предпочтительно, чтобы приводной механизм также включал в себя датчик, электрически подключенный к центральному контроллеру и тяговому двигателю и используемый для вывода параметров состояния тягового двигателя на центральный контроллер.
Предпочтительно, чтобы он также включал в себя индикаторный прибор, связанный с контроллером коммуникационным соединением, и используемый для отображения рабочих параметров транспортного средства в режиме реального времени.
Во втором аспекте настоящее изобретение обеспечивает способ управления, который применяется к контроллеру системы управления ходом погрузчика, вышеупомянутый способ включает в себя:
в соответствии с режимом вывода селекторного переключателя отправка команд на ECU двигателя для управления двигателем, чтобы он работал в заданном диапазоне скорости вращения;
в соответствии с сигналом угла педали акселератора регулировка выходной мощности тягового двигателя.
Настоящее изобретение также обеспечивает способ управления, который применяется к контроллеру системы управления ходом погрузчика, вышеупомянутый способ включает в себя:
в соответствии с режимом вывода селекторного переключателя отправка команд на ECU двигателя для управления двигателем, чтобы он работал в заданном диапазоне скорости вращения;
в соответствии с сигналом угла педали акселератора и сигналом передачи рычага управление выходной мощностью тягового двигателя и преобразование электрической энергии генератора для вывода электрической энергии на приводной механизм, чтобы привести в движение транспортное средство.
В качестве предпочтительного варианта осуществления режим ввода селекторного переключателя включает в себя режим большой нагрузки и/или режим средней нагрузки и/или режим малой нагрузки;
в режиме большой нагрузки диапазон скорости вращения, устанавливаемый двигателем, составляет ±3% от номинальной скорости вращения;
в режиме средней нагрузки диапазон скорости вращения, устанавливаемый двигателем, составляет ±3% от скорости вращения, соответствующей минимальному значению расхода топлива;
в режиме малой нагрузки диапазон скорости вращения, устанавливаемый двигателем, является диапазоном скорости холостого хода.
В качестве предпочтительного варианта осуществления в режиме большой нагрузки номинальная частота вращения двигателя составляет 2000 об/мин;
в режиме средней нагрузки скорости вращения, соответствующая минимальному значению расхода топлива двигателем составляет 1400 об/мин;
в режиме малой нагрузки скорость вращения холостого хода двигателя не превышает 800 об/мин.
В качестве предпочтительного варианта осуществления рычаг снабжен передачей переднего хода, нейтральной передачей и передачей заднего хода и используется для вывода сигнала передачи рычага на контроллер путем переключения рычага на разные передачи.
В качестве предпочтительного варианта осуществления, когда рычаг выдает сигнал переднего или заднего хода, а педаль акселератора выдает сигнал увеличения угла, центральный контроллер управляет контроллером тягового двигателя для подачи мощности на тяговый двигатель, и управляет двигателем для выработки электричества для генератора, чтобы выводить электрическую энергию на тяговый двигатель для движения транспортного средства вперед или назад.
В качестве предпочтительного варианта осуществления, когда рычаг подает сигнал нейтральной передачи, а педаль акселератора выдает сигнал увеличения угла, центральный контроллер управляет двигателем для выработки электричества для генератора, но прекращает выдачу сигналов на контроллер тягового двигателя, чтобы контроллер тягового двигателя больше не подавал мощность на тяговый двигатель.
В качестве предпочтительного варианта осуществления, когда рычаг выдает сигнал переднего или заднего хода, а педаль акселератора выдает сигнал угла, угол педали акселератора положительно коррелирует с выходной мощностью контроллера тягового двигателя к тяговому двигателю.
В третьем аспекте настоящее изобретение также обеспечивает погрузчик, который включает в себя систему управления ходом погрузчика.
В четвертом аспекте настоящее изобретение также обеспечивает машиночитаемую память, в которой хранится программа управления погрузчиком, когда программа управления погрузчиком обрабатывается процессором, реализуется способ управления погрузчиком.
В пятом аспекте настоящее изобретение также обеспечивает контроллер транспортного средства, включающий в себя память, процессор и программу управления погрузчиком, которая хранится в памяти и может выполняться на процессоре. Когда процессор выполняет программу управления погрузчиком реализуется способ управления погрузчиком.
По сравнению с предшествующим уровнем техники изобретение имеет следующие полезные эффекты:
1. Настоящее изобретение обеспечивает систему управления ходом погрузчика, которая включает в себя двигатель; генератор для передачи электрической энергии на приводной механизм, и подключенный к двигателю через входной вал; контроллер для электрического подключения педали акселератора и селекторного переключателя; приводной механизм, включающий тяговый двигатель и редуктор, подключенный к выходному валу тягового двигателя, вышеупомянутый генератор, электрически подключенный к тяговому двигателю через контроллер, для подачи электрической энергии тяговому двигателю; контроллер может управлять выходной мощностью тягового двигателя в соответствии с сигналом угла педали акселератора и управляет двигателем, чтобы он работал в заданном диапазоне скорости вращения, в соответствии с режимом ввода селекторного переключателя, чтобы двигатель мог поддерживать постоянную скорость при ускорении или торможении машины, тем самым снижая расход моторного масла и улучшая экономичность;
2. Способ управления ходом погрузчика, предусмотренный настоящим изобретением, использует систему управления ходом погрузчика, вышеупомянутый контроллер может отправлять команды в ECU двигателя в соответствии с режимом вывода селекторного переключателя, чтобы управлять работой двигателя в заданном диапазоне скорости вращения; и в соответствии с сигналом угла педали акселератора и сигналом передачи рычага управляет выходной мощностью тягового двигателя и преобразует электрическую энергию генератора для вывода электрической энергии на приводной механизм, чтобы привести в движение транспортное средство. Вышеупомянутый способ управления может поддерживать постоянную скорость двигателя после определения режима ввода селекторного переключателя. Когда скорость находится в области низкого расхода топлива, расход топлива двигателя ниже при той же рабочей нагрузке, или двигатель, использующий эту технологию, имеет большую рабочую нагрузку при том же расходе топлива;
3. Способ управления ходом погрузчика, обеспечиваемый настоящим изобретением, когда транспортное средство находится в режиме большой нагрузки, скорость вращения, соответствующая точке максимальной мощности двигателя, может поддерживаться постоянной, при этом двигатель может продолжать развивать максимальную мощность, приводя в действие генератор для выработки электроэнергии. Нагрузка преодолевается путем преобразования электрической энергии в больший крутящий момент тягового двигателя, поэтому двигатель может постоянно поддерживать работу на максимальной или номинальной мощности, что позволяет достигнуть большей рабочей эффективности транспортного средства в режиме большой нагрузки, усилить транспортное средство и увеличить его мощность.
Описание прилагаемых чертежей
Фигура 1 представляет собой принципиальную схему системы управления ходом погрузчика, предусмотренной вариантом осуществления настоящего изобретения;
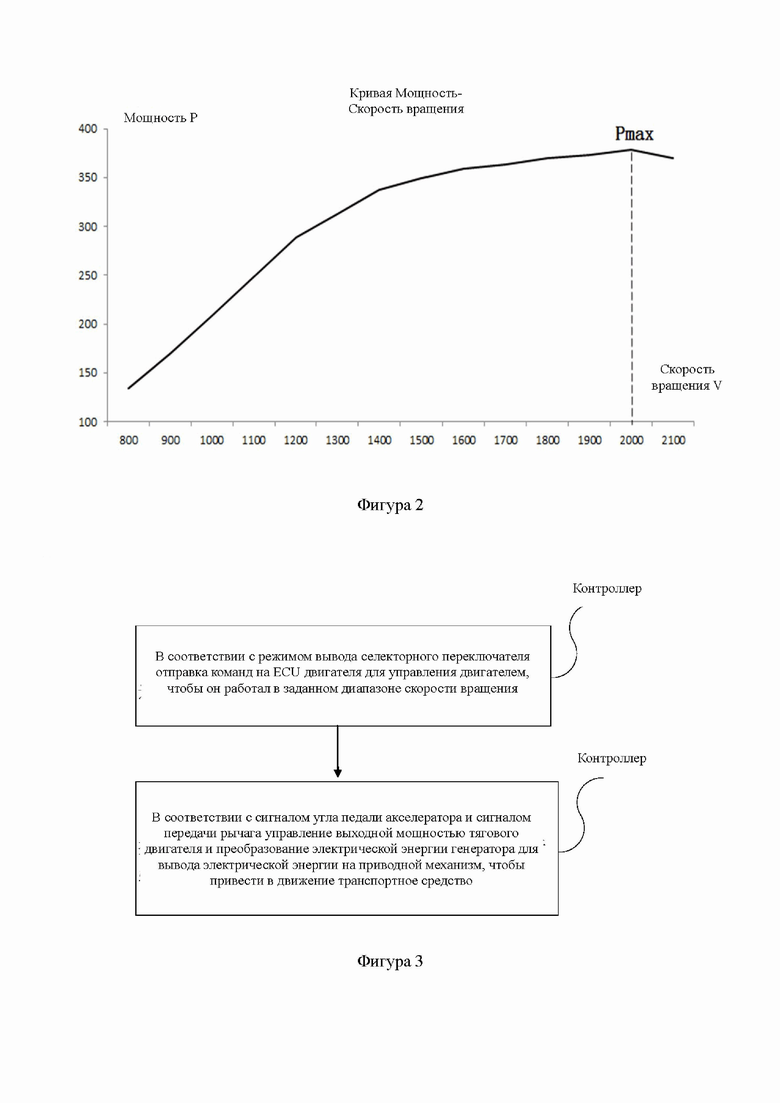
Фигура 2 представляет собой схематическое изображение кривой мощности и скорости вращения двигателя системы управления ходом погрузчика, предусмотренной вариантом осуществления настоящего изобретения;
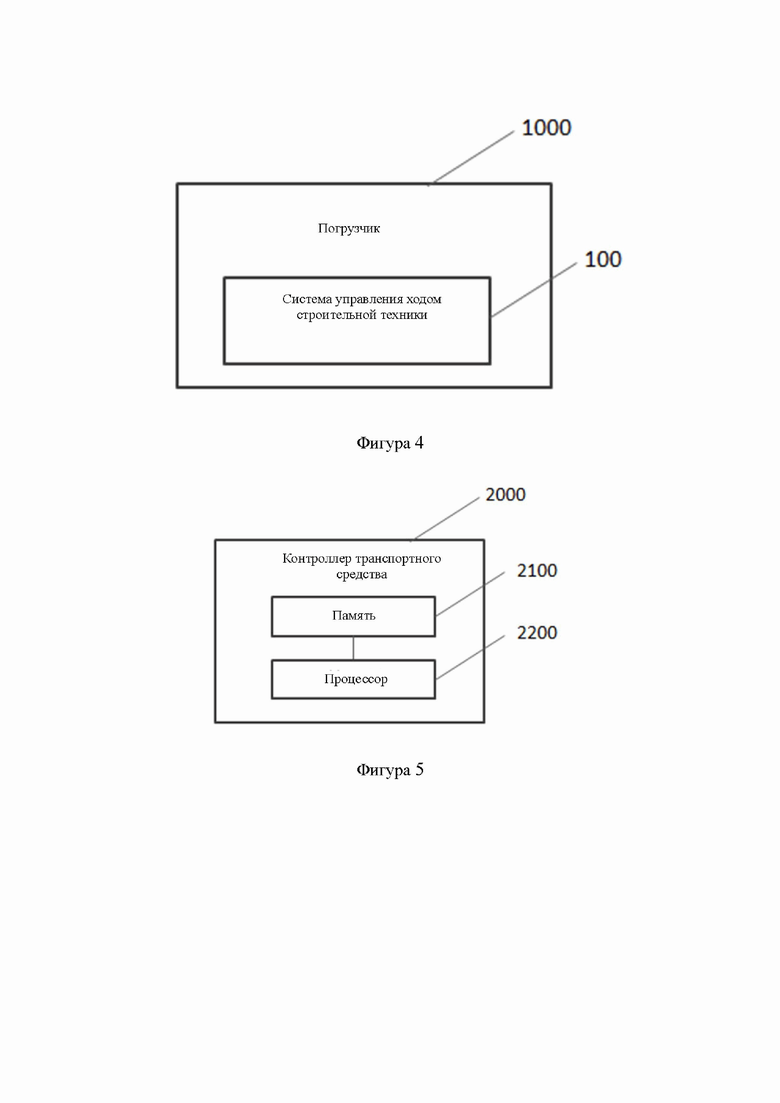
Фигура 3 представляет собой технологическую схему способа управления ходом погрузчика, предусмотренной вариантом осуществления настоящего изобретения;
Фигура 4 представляет собой схематическое изображение погрузчика, предусмотренного вариантом осуществления настоящего изобретения;
Фигура 5 представляет собой схематическое изображение контроллера транспортного средства, предусмотренного вариантом осуществления настоящего изобретения;
Конкретные варианты осуществления
Настоящее изобретение будет дополнительно описано ниже вместе с прилагаемыми чертежами. Следующие примеры используются только для более четкой иллюстрации технической схемы настоящего изобретения и не могут быть использованы для ограничения объема защиты настоящего изобретения.
При описании настоящего изобретения следует понимать, что термины «центр», «продольный», «поперечный», «сверху», «снизу», «спереди», «сзади», «слева», «справа», «вертикальный», «горизонтальный», «верх», «низ», «внутри», «снаружи» и другие указанные направления или позиционные соотношения основаны на направлениях или позиционных соотношениях, приведенных на чертежах, которые приводятся только для удобства описания изобретения и упрощения описания, а не для указания или подразумевания того, что устройство или элемент, о которых идет речь, должны иметь определенную ориентацию, быть сконструированы и работать в определенной ориентации, поэтому это нельзя понимать как ограничение изобретения. Кроме того, термины «первый», «второй» и т. д. используются только в описательных целях и не могут быть поняты как указывающие или подразумевающие относительную важность или неявно указывающие на количество указанных технических характеристик. В описании изобретения, если не указано иное, «несколько» означает два или более.
При описании настоящего изобретения следует отметить, что термины «установка», «соединение» и «подключение» следует понимать в широком смысле, если иное прямо не указано и не ограничивается, например, это может быть фиксированное, разъемное или неразъемное соединение; может быть механическое или электрическое соединение; может быть прямое соединение, также может быть косвенное соединение через промежуточную среду и может быть связь внутри двух элементов. Для обычных специалистов в данной области конкретное значение приведенных выше терминов в изобретении может быть понято через конкретные случаи.
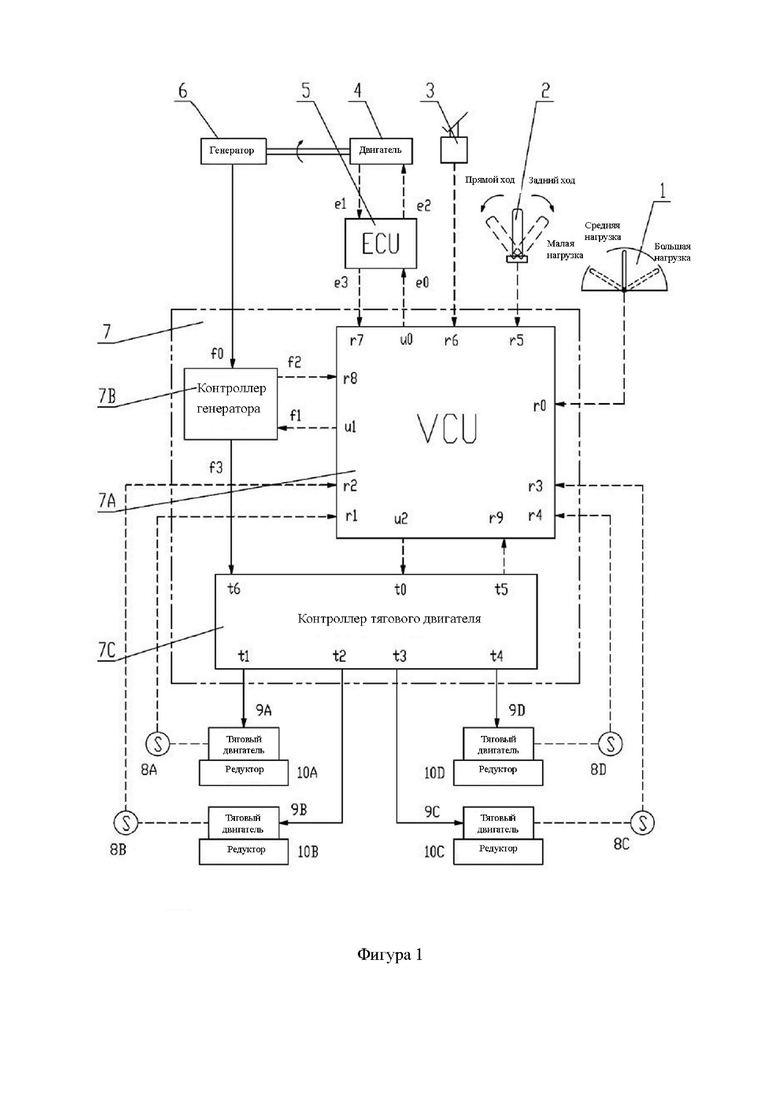
Настоящее изобретение обеспечивает систему управления ходом погрузчика. На фиг. 1 показана принципиальная схема работы, включая двигатель 4, генератор 6, контроллер 7, приводной механизм, педаль акселератора 3, рычаг 2 и селекторный переключатель 1.
В частности, двигатель 4 и генератор 6 соединены муфтой или трансмиссионным валом. Когда для соединения используется трансмиссионный вал, входные валы двигателя 4 и генератора 6 не обязательно должны совпадать.
Генератор 6 используется для передачи электрической энергии на приводной механизм, а контроллер 7 служит для электрической связи педали акселератора 3 и селекторного переключателя 1. В данном варианте контроллер 7 электрически связан с педалью акселератора 3 и селекторного переключателя 1, при этом электрическое соединение включает в себя линии управления (тонкие линии), электрические линии (более толстые линии), электрические кабели, оптические кабели, оптоволоконные соединения и т. д.
Приводной механизм включает в себя тяговый двигатель и редуктор, причем редуктор соединен с тяговым двигателем через выходной вал. В этом варианте осуществления тяговый двигатель и редуктор соединены шлицей. Генератор 6 электрически соединен с тяговым двигателем через контроллер 7 для подачи электрической энергии на тяговый двигатель. Вышеупомянутый контроллер 7 может управлять выходной мощностью тягового двигателя в соответствии с сигналом угла педали акселератора 3 и управлять двигателем 4, чтобы он работал в заданном диапазоне скорости вращения, в соответствии с режимом ввода селекторного переключателя 1.
В некоторых вариантах осуществления контроллер 7 включает в себя центральный контроллер 7А, контроллер генератора 7В и контроллер тягового двигателя 7С. Центральный контроллер 7А связан с контроллером генератора 7В и контроллером тягового двигателя 7С. Центральный контроллер 7А связан с ECU 5 двигателя коммуникационным соединением, контроллер генератора 7В связан с центральным контроллером 7А коммуникационным соединением, контроллер генератора 7В также электрически подключен к генератору 6, а контроллер тягового двигателя 7С связан с центральным контроллером 7А коммуникационным соединением. Контроллер тягового двигателя 7С соединен с тяговым двигателем электрическим кабелем, а контроллер генератора 7В связан с контроллером тягового двигателя 7С коммуникационным соединением.
Центральный контроллер 7А также связан с рычагом 2 коммуникационным соединением, рычаг 2 используется для управления направлением движения и состоянием движения приводного механизма. Рычаг 2 снабжен передачей переднего хода, нейтральной передачей и передачей заднего хода. В некоторых вариантах осуществления левая сторона рычага 2 представляет собой передачу переднего хода, правая сторона - передачу заднего хода, а когда рычаг 2 находится на средней передаче, это нейтральная передача. Водитель использует рычаг 2 для переключения различных передач, чтобы выводить сигнал передачи рычага 2 на центральный контроллер 7А, реализуя управление транспортным средством для движения вперед, назад или оставаясь на нейтральной передаче.
Приводной механизм состоит из четырех тяговых двигателей, и каждый из четырех тяговых двигателей индивидуально оснащен контроллером тягового двигателя 7С. В некоторых вариантах осуществления приводной механизм также включает в себя датчик, электрически подключенный к контроллеру 7. Датчик электрически подключен к центральному контроллеру 7А и тяговому двигателю и используется для вывода параметров состояния тягового двигателя на центральный контроллер 7А. Иными словами, каждый из тяговых двигателей индивидуально оснащен датчиком.
В частности, тяговый двигатель 9A подключен к редуктору 10A, датчик 8А выводит параметры состояния тягового двигателя 9A на центральный контроллер 7A; тяговый двигатель 9В подключен к редуктору 10В, датчик 8В выводит параметры состояния тягового двигателя 9B на центральный контроллер 7A; тяговый двигатель 9С подключен к редуктору 10С, датчик 8С выводит параметры состояния тягового двигателя 9С на центральный контроллер 7A; тяговый двигатель 9D подключен к редуктору 10D, датчик 8D выдает параметры состояния тягового двигателя 9D на центральный контроллер 7A.
В этом варианте осуществления селекторный переключатель 1 имеет три режима ввода: режим большой нагрузки, режим средней нагрузки и режим малой нагрузки. Водитель может выбирать соответствующие режимы ввода в соответствии с различными условиями работы. При этом режим малой нагрузки представляет собой режим экономичной скорости вращения, режим средней нагрузки представляет собой режим скорости вращения с низким расходом топлива, а режим большой нагрузки представляет собой режим номинальной скорости вращения или режим скорости вращения, соответствующий точке максимальной мощности.
В частности, при различных режимах ввода условия загрузки погрузчика следующие:
в режиме малой нагрузки: нагрузка <50% номинальной нагрузки. В этом случае срок службы транспортного средства велик. Когда водитель выбирает режим малой нагрузки, соответствующая заданная область скорости двигателя 4 является областью скорости холостого хода.
В режиме средней нагрузки: 80% номинальной нагрузки > нагрузки ≥ 50% номинальной нагрузки. Когда водитель выбирает режим средней нагрузки, соответствующая заданная область скорости двигателя 4 составляет ±3% скорости, соответствующей минимальному значению расхода топлива.
В режиме большой нагрузки: нагрузка ≥ 80% номинальной нагрузки. Когда водитель выбирает режим большой нагрузки, заданная область скорости, соответствующая двигателю 4, составляет ±3% от номинальной скорости.
Когда водитель выбирает режим большой нагрузки, нагрузка на транспортное средство велика, а двигатель 4 поддерживает высокую скорость вращения.
Когда водитель выбирает режим средней нагрузки, нагрузка на транспортное средство становится средней, а двигатель 4 поддерживает среднюю скорость вращения.
Когда водитель выбирает режим малой нагрузки, нагрузка на транспортное средство невелика, а двигатель 4 поддерживает низкую скорость вращения.
В настоящем изобретении номинальная скорость вращения двигателя 4 установлена на 2000 об/мин, скорость вращения, соответствующая минимальному значению расхода топлива, составляет 1400 об/мин, скорость вращения холостого хода не превышает 800 об/мин, при этом есть отклонение ±3% между номинальной скоростью вращения и скоростью вращения, соответствующей минимальному значению расхода топлива, то есть в режиме большой нагрузки номинальная скорость вращения двигателя 4 может поддерживаться в пределах 2000±3%, а в режиме средней нагрузки скорость вращения двигателя 4, соответствующая минимальному значению расхода топлива, может поддерживаться в диапазоне 1400±3%.
Специалистам в данной области техники должно быть понятно, что номинальная скорость вращения двигателя 4, скорость вращения, соответствующая минимальному значению расхода топлива, и скорость вращения холостого хода будут меняться в зависимости от различных погрузчиков. Следует отметить, что специалисты в данной области техники могут установить номинальную скорость вращения двигателя 4, скорость вращения, соответствующую минимальному значению расхода топлива, и скорость вращения холостого хода на другие значения при различных режимах ввода. Например, в режиме большой нагрузки номинальная скорость вращения двигателя 4 может быть установлена на 1800 об/мин, в режиме средней нагрузки скорость вращения двигателя 4, соответствующая минимальному значению расхода топлива, может быть установлена на 1200 об/мин, а в режиме малой нагрузки скорость вращения холостого хода двигателя 4 может быть установлена не более 600 об/мин. Специалисты в данной области могут настроить ее в соответствии с реальными условиями работы, и настоящее изобретение этим не ограничивается.
Когда водитель переводит селекторный переключатель 1 в режим средней нагрузки, скорость вращения двигателя 4 регулируется центральным контроллером 7А и ECU 5 двигателя для поддержания постоянной работы на первой скорости вращения, то есть первая скорость вращения соответствует минимальному значению расхода топлива; следует отметить, что предпочтительно, чтобы первая скорость вращения могла быть установлена на скорость вращения, соответствующую минимальному диапазону расхода топлива транспортного средства, а также могла быть установлена на скорость вращения, соответствующую максимальному значению крутящего момента двигателя 4.
Когда водитель переводит селекторный переключатель 1 в режим большой нагрузки, скорость вращения двигателя 4 регулируется центральным контроллером 7A и ECU 5 двигателя для поддержания постоянной работы на второй скорости вращения, то есть вторая скорость вращения находится в пределах диапазона номинальной скорости вращения; предпочтительно, чтобы вторая скорость вращения могла быть установлена на номинальную скорость вращения, соответствующую номинальной мощности транспортного средства, или могла быть установлена на скорость вращения, соответствующую максимальной мощности транспортного средства. Фиг. 2 представляет собой кривую мощности и скорости вращения двигателя, скорость, соответствующая точке максимальной мощности двигателя 4, составляет 2000 об/мин, поэтому 2000 об/мин можно установить как постоянную скорость, соответствующую режиму большой нагрузки, при этом центральный контроллер 7А выводит выходные данные на ECU 5 двигателя, следовательно, скорость двигателя 4 может поддерживаться в диапазоне 2000 об/мин ±3%, или двигатель может работать с постоянной скоростью 2000 об/мин. Когда погрузчик работает при большой нагрузке, он может продолжать использовать максимальную мощность двигателя 4 для выработки электроэнергии и преобразовывать электрическую энергию в больший крутящий момент тягового двигателя для преодоления нагрузки. Таким образом, максимальная мощность двигателя 4 может непрерывно использоваться для работы, повышая эффективность производства.
Когда водитель переводит селекторный переключатель 1 в режим малой нагрузки, скорость вращения двигателя 4 регулируется центральным контроллером 7А и ECU 5 двигателя, а третья скорость вращения поддерживается постоянной. В это время третья скорость вращения находится в области холостого хода; предпочтительно, чтобы третья скорость вращения могла быть установлена как режим холостого хода транспортного средства, то есть скорость вращения является режимом, соответствующим самой низкой скорости вращения двигателя 4.
Следует понимать, что специалисты в данной области техники также могут установить режим ввода настройки селекторного переключателя 1 в нужное состояние по мере необходимости, например, когда погрузчик больше использует режим большой нагрузки, можно установить только режим большой нагрузки, когда погрузчик больше использует режим малой нагрузки, можно установить только режим ввода селекторного переключателя 1 в режим малой нагрузки. Если у погрузчика есть требования к режиму большой нагрузки, режиму средней нагрузки и режиму малой нагрузки, можно установить три режима ввода одновременно. Следует отметить, что специалисты в данной области техники могут также установить режим ввода селекторного переключателя 1 на несколько режимов для удовлетворения требований и изобретение этим не ограничивается.
Для облегчения понимания на фиг. 1 показаны взаимосвязи соединений между двигателем 4, генератором 6, приводным механизмом, педалью акселератора 3, датчиком, рычагом 2, селекторным переключателем 1 и контроллером 7. Конкретные взаимосвязи соединений следующие:
1. Взаимосвязи соединений входных и выходных клемм центрального контроллера 7А следующие:
взаимосвязи соединений входных клемм: входная клемма r0 подключена к выходной клемме селекторного переключателя 1, входная клемма r1 подключена к выходной клемме датчика 8A, входная клемма r2 подключена к выходной клемме датчика 8B, входная клемма r3 подключена к выходной клемме датчика 8C, входная клемма r4 подключена к выходной клемме датчика 8D, входная клемма r5 подключена к выходной клемме рычага 2, входная клемма r6 подключена к выходной клемме педали акселератора 3, входная клемма r7 подключена к выходной клемме e3 ECU 5 двигателя, входная клемма r8 подключена к выходной клемме f2 контроллера генератора 7В, входная клемма r9 подключена к выходной клемме t5 контроллера тягового двигателя 7C.
Взаимосвязи соединений выходных клемм: выходная клемма u0 подключена к входной клемме e0 ECU 5 двигателя, выходная клемма u1 подключена к входной клемме f1 контроллера генератора 7B, выходная клемма u2 подключена к входной клемме t0 контроллера 7С тягового двигателя.
2. Взаимосвязи соединений входных и выходных клемм контроллера генератора 7B следующие:
взаимосвязи соединений входных клемм: входная клемма f0 подключена к выходной клемме генератора 6, входная клемма f1 подключена к выходной клемме u1 центрального контроллера 7А.
Взаимосвязи соединений выходных клемм: выходная клемма f2 подключена к входной клемме r8 центрального контроллера 7А, выходная клемма f3 контроллера генератора 7В подключена к входной клемме t6 контроллера тягового двигателя 7С.
3. Взаимосвязи соединений входных и выходных клемм контроллера тягового двигателя 7С следующие:
Взаимосвязи соединений входных клемм: входная клемма t0 подключена к выходной клемме u2 центрального контроллера 7A, входная клемма t6 подключена к выходной клемме f3 контроллера генератора 7B.
Взаимосвязи соединений выходных клемм: выходная клемма t1 подключена к входной клемме тягового двигателя 9А, выходная клемма t2 подключена к входной клемме тягового двигателя 9В, выходная клемма t3 подключена к входной клемме тягового двигателя 9С, выходная клемма t4 подключена к входной клемме тягового двигателя 9D, выходная клемма t5 подключена к входной клемме r9 центрального контроллера 7А.
4. Взаимосвязи соединений входных и выходных клемм ECU 5 двигателя следующие:
взаимосвязи соединений входных клемм: входная клемма e0 подключена к выходной клемме u0 центрального контроллера 7A, входная клемма e1 подключена к выходной клемме двигателя 4.
Взаимосвязи соединений выходных клемм: входная клемма e3 подключена к выходной клемме r7 центрального контроллера 7A, входная клемма e2 подключена к выходной клемме двигателя 4.
5. Взаимосвязи соединений входных и выходных клемм датчика следующие:
Взаимосвязи соединений входных клемм: входная клемма датчика 8A подключена к выходной клемме тягового двигателя 9A, входная клемма датчика 8B подключена к выходной клемме тягового двигателя 9B, входная клемма датчика 8C подключена к выходной клемме тягового двигателя 9C, входная клемма датчика 8D подключена к выходной клемме тягового двигателя 9D.
Взаимосвязи соединений выходных клемм: выходная клемма датчика 8A подключена к входной клемме r1 центрального контроллера 7A, выходная клемма датчика 8B подключена к входной клемме r2 центрального контроллера 7A, выходная клемма датчика 8C подключен к входной клемме r3 центрального контроллера 7A, выходная клемма датчика 8D подключена к входной клемме r4 центрального контроллера 7A.
Когда водитель определяет, что нагрузка является средней на основе текущего материала, сначала поворачивает селекторный переключатель 1 в положение средней нагрузки, после чего запускает двигатель 4. (Следует отметить, что водитель может перед запуском выбрать режим с помощью селекторного переключателя 1 или сначала запустить двигатель 4 и сохранить режим, который был до запуска. После запуска двигателя 4 можно выбрать новый режим работы в соответствии с конкретным материалом.) В это время, после того как центральный контроллер 7А обнаруживает входной сигнал селекторного переключателя 1 через клемму r0, он отправляет сигнал в ECU 5 двигателя через клемму u0 и клемму е0, требуя от ECU 5 двигателя отрегулировать скорость вращения до соответствующей режиму средней нагрузки, и поддерживать постоянную или почти постоянную скорость вращения с диапазоном колебаний скорости вращения ±3%.
ECU 5 двигателя выводит управляющие сигналы на двигатель 4 через клемму е2, чтобы заставить двигатель 4 работать на скорости вращения, требуемой ECU 5, и посылает сигналы, такие как скорость вращения и крутящий момент, на центральный контроллер 7А в режиме реального времени через клемму e1, клемму e3 и клемму r7.
С другой стороны, после запуска двигателя 4 он приводит в действие генератор 6 для выработки электроэнергии. Переменный ток, генерируемый генератором 6, выводится на контроллер генератора 7В через выходную клемму и клемму f0. Центральный контроллер 7А посылает команды, такие как выпрямление, фильтрация волн и регулировка напряжения, на контроллер генератора 7В через клемму u1 и клемму f1. Контроллер генератора 7В преобразует мощность переменного тока в мощность постоянного тока после выпрямления, фильтрации волн и регулировки напряжения, после чего преобразует ее в мощность постоянного тока и выдает ее к контроллеру тягового двигателя 7С через клемму f3 и клемму t6.
Когда водителю необходимо ехать вперед, он сначала толкает рычаг 2 вперед (влево на фигуре), и центральный контроллер 7А регистрирует сигнал прямого хода через клемму r5, затем водитель нажимает на педаль акселератора 3 и создает определенное угловое смещение, педаль акселератора 3 посылает сигнал хода на центральный контроллер 7А через выходную клемму и клемму r6. Центральный контроллер 7А отправляет команду выходной электрической энергии на контроллер тягового двигателя 7С через клемму u2 и клемму t0 в соответствии с сигналом прямого хода рычага 2 и сигналом углового смещения, вводимым педалью акселератора 3. В этом случае контроллер тягового двигателя 7C преобразует постоянный ток в переменный ток, соответствующий угловому смещению педали акселератора 3 и соответствующий сигналу прямого хода рычага 2 после инвертирования постоянного тока через инвертор, и выводит переменный ток на тяговый двигатель 9A через клемму t1, выводит переменный ток на тяговый двигатель 9B через клемму t2, выводит переменный ток на тяговый двигатель 9C через клемму t3 и выводит переменный ток на тяговый двигатель 9D через клемму t4. Под действием переменного тока тяговый двигатель выдает скорость вращения и крутящий момент, соответствующие угловому смещению педали акселератора 3 и соответствующие сигналу прямого хода, заставляя транспортное средство двигаться вперед после снижения скорости и увеличения крутящего момента через редуктор.
Датчик используется для отправки сигналов, таких как скорость вращения и крутящий момент тягового двигателя, на центральный контроллер 7А в режиме реального времени через выходную клемму, сигнал электрической энергии, выдаваемый контроллером генератора 7В, на контроллер тягового двигателя 7С и сигнал генерации электроэнергии генератора 6 отправляются через выходной терминал f2 на центральный контроллер 7А в режиме реального времени, а сигнал электрической энергии, выдаваемый контроллером тягового двигателя 7С на тяговый двигатель, отправляется на центральный контроллер 7А в режиме реального времени через выходную клемму t5.
Чтобы облегчить водителю наблюдение за рабочим состоянием погрузчика, система также включает в себя индикаторный прибор, связанный с контроллером 7 коммуникационным соединением для отображения рабочего состояния транспортного средства в режиме реального времени. Когда центральный контроллер 7А считывает информацию о параметрах транспортного средства, он отправляет информацию о параметрах на прибор отображения и выполняет динамическое отображение в реальном времени, чтобы облегчить считывание водителю.
Когда рычаг 2 находится в среднем положении, то есть когда рычаг 2 находится на нейтральной передаче, центральный контроллер 7А не будет выдавать управляющие сигналы на контроллер тягового двигателя 7С даже при наличии сигнала от педали акселератора 3. Соответственно, контроллер 7С тягового двигателя не будет выдавать сигналы мощности тяговому двигателю, и тяговый двигатель не будет получать электроэнергию переменного тока от контроллера тягового двигателя 7С, и будет поддерживать скорость равной 0 или поддерживать текущую скорость и постепенно замедляться до остановки с инерционным ходом транспортного средства.
Когда водитель толкает рычаг 2 назад, центральный контроллер 7А получает сигнал, требующий, чтобы транспортное средство ехало назад, то есть центральный контроллер 7А обнаруживает сигнал заднего хода через клемму r5. В это время водитель нажимает на педаль акселератора 3 и создает определенное угловое смещение. Педаль акселератора 3 отправляет сигнал хода на центральный контроллер 7A через выходную клемму и клемму r6. Центральный контроллер 7A отправляет команду на выходную электрическую энергию и сигнал заднего хода на контроллер 7C тягового двигателя через клемму u2 и клемму t0 в соответствии с сигналом заднего хода, выдаваемым рычагом 2, и сигналом углового смещения, выдаваемым педалью акселератора 3, затем контроллер тягового двигателя 7С инвертирует постоянный ток через инвертор, а затем преобразует постоянный ток в обратный переменный ток (переменный ток, противоположный сигналу прямого хода), соответствующий угловому смещению педали акселератора 3 и выводит переменный ток на тяговый двигатель 9А через клемму t1, выводит переменный ток на тяговый двигатель 9В через клемму t2, выводит переменный ток на тяговый двигатель 9С через клемму t3, выводит переменный ток на тяговый двигатель 9D через клемму t4, под действием обратного переменного тока тяговый двигатель выдает скорость вращения и крутящий момент, соответствующие угловому смещению педали акселератора 3, заставляя транспортное средство двигаться назад после снижения скорости и увеличения крутящего момента через редуктор.
Следует понимать, что сигнал прямого хода находится в направлении, противоположном скорости вращения (или крутящему моменту) тягового двигателя, соответствующей сигналу заднего хода.
Когда водитель переводит рычаг 2 в нейтральное положение, транспортное средство находится на холостом ходу. В это время центральный контроллер 7А прекращает отправлять сигналы на контроллер тягового двигателя 7С в соответствии с сигналом нейтрали, выдаваемым рычагом 2. Контроллер тягового двигателя 7С прекращает подачу переменного тока на тяговый двигатель, сигналы на клеммах u2 и t0 прекращаются. Сигналы, подаваемые на тяговый двигатель клеммами t1, t2, t3 и t4, прекращаются. Тяговый двигатель не получает переменный ток от контроллера тягового двигателя 7С. Скорость равна 0, или поддерживается текущая скорость с постепенным замедлением до остановки с инерционным ходом транспортного средства.
В это время скорость двигателя 4 по-прежнему поддерживается на скорости, соответствующей режиму селекторного переключателя 1, то есть двигатель 4 приводит в действие генератор 6 для выработки электроэнергии и непрерывно выдает переменный ток на контроллер генератора 7В. Контроллер генератора 7В выпрямляет переменный ток в постоянный и выдает его на контроллер тягового двигателя 7С. Контроллер 7С тягового двигателя не выполняет преобразование постоянного тока в переменный, вся высоковольтная электроэнергия не образует контур, а индуцированная электродвижущая сила, создаваемая генератором 6, поддерживается на относительно высоком напряжении для работы. Только когда центральный контроллер 7А выводит сигналы на контроллер тягового двигателя 7С, контроллер тягового двигателя 7С инвертирует постоянный ток в переменный и выдает электрическую энергию на тяговый двигатель.
После запуска двигателя 4 центральный контроллер 7А поддерживает связь с контроллером генератора 7В и контроллером тягового двигателя 7С. Переменный ток генератора 6 выпрямляется до постоянного тока через контроллер генератора 7В и выводится на контроллер тягового двигателя 7С. Однако подача электрической энергии от контроллера тягового двигателя 7С к тяговому двигателю управляется центральным контроллером 7А, а центральный контроллер 7А управляет контроллером тягового двигателя 7С в соответствии с сигналами рычага 2 и педали акселератора 3.
Когда угол наклона педали акселератора 3 дополнительно увеличивается, выходной сигнал от центрального контроллера 7А к контроллеру тягового двигателя 7С увеличивается или значение сигнала увеличивается, электрическая энергия, выдаваемая контроллером тягового двигателя 7С к тяговому двигателю, увеличивается, и выходная мощность тягового двигателя увеличивается, скорость движения транспортного средства увеличивается, и водитель чувствует, что вся машина очень мощная (крутящий момент увеличивается).
Когда угол педали акселератора 3 уменьшается, выходной сигнал от центрального контроллера 7А к контроллеру тягового двигателя 7С уменьшается, или значение сигнала уменьшается, выход электрической энергии от контроллера тягового двигателя 7С к тяговому двигателю уменьшается, выходная мощность тягового двигателя снижается, и скорость работы транспортного средства снижается.
Когда рычаг 2 выдает сигнал прямого или заднего хода, а педаль акселератора 3 выдает сигнал угла, сигнал увеличения угла педали акселератора 3 положительно коррелирует с выходной мощностью контроллера тягового двигателя 7С для тягового двигателя. Сигнал увеличения угла педали акселератора 3 не зависит от скорости вращения и крутящего момента двигателя 4, то есть педаль акселератора 3 не регулирует скорость вращения двигателя 4. Когда угол педали акселератора 3 увеличивается или уменьшается, двигатель 4 может продолжать работать с постоянной скоростью вращения, а скорость вращения двигателя 4 задается режимом ввода, соответствующим селекторному переключателю 1.
Фиг. 3 представляет собой технологическую схему способа управления ходом погрузчика, обеспечиваемого настоящим изобретением. Центральный контроллер 7А отправляет команду в ECU 5 двигателя в соответствии с режимом вывода селекторного переключателя 1 и управляет двигателем 4, чтобы он работал в заданном диапазоне скорости вращения. Когда рычаг 2 выдает сигнал прямого или заднего хода, а педаль акселератора 3 выдает сигнал увеличения угла, центральный контроллер 7А выдает мощность на тяговый двигатель через контроллер тягового двигателя 7С и управляет двигателем 4 для выработки электричества для генератора 6 для подачи электрической энергии на тяговый двигатель для движения транспортного средства вперед или назад.
Когда рычаг 2 подает сигнал нейтральной передачи, а педаль акселератора 3 выдает сигнал увеличения угла, центральный контроллер 7А по-прежнему управляет двигателем 4 для выработки электричества для генератора 6, но прекращает выдачу сигналов на контроллер тягового двигателя 7С, чтобы контроллер тягового двигателя 7С больше не подавал мощность на тяговый двигатель.
То есть, когда установлен режим селекторного переключателя 1, двигатель 4 всегда будет работать на постоянной скорости, особенно когда скорость находится в области низкого расхода топлива. При той же рабочей нагрузке расход топлива двигателя 4 ниже, или при том же расходе топлива двигатель 4 по данной технологии имеет большую рабочую нагрузку.
Фиг. 4 представляет собой структурную схему погрузчика в соответствии с вариантом осуществления настоящего изобретения. Ссылаясь на фиг. 4, погрузчик 1000 включает в себя вышеупомянутую систему управления ходом погрузчика 100.
Настоящее изобретение также предлагает машиночитаемый носитель данных, на котором хранится программа управления погрузчиком, когда программа управления погрузчиком обрабатывается процессором, может быть реализован способ управления погрузчиком.
В соответствии с вариантом осуществления настоящего изобретения машиночитаемый носитель данных с помощью вышеупомянутого способа управления погрузчиком позволяет погрузчику отправлять команды в ECU 5 двигателя в соответствии с режимом вывода селекторного переключателя 1 для управления двигателем 4, чтобы он работал в заданном диапазоне скорости вращения, при этом в соответствии с сигналом угла педали акселератора 3 и сигналом передачи рычага 2 регулируется выходная мощность тягового электродвигателя, а электрическая энергия генератора 6 преобразуется для подачи электрической энергии на приводной механизм для управления транспортным средством.
На фиг. 5 представлено схематическое изображение контроллера транспортного средства 2000 в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 5, контроллер транспортного средства 2000 включает в себя память 2100, процессор 2200 и программу управления погрузчиком, хранящуюся в памяти 2100 и работающую на процессоре 2100. Когда процессор 2100 выполняет программу управления погрузчиком, реализуется вышеупомянутый способ управления погрузчиком.
В соответствии с вариантом осуществления настоящего изобретения контроллер транспортного средства с помощью вышеупомянутого способа управления погрузчиком позволяет погрузчику 1000 отправлять команды в ECU 5 двигателя в соответствии с режимом вывода селекторного переключателя 1 для управления двигателем 4, чтобы он работал в заданном диапазоне скорости вращения, при этом в соответствии с сигналом угла педали акселератора 3 и сигналом передачи рычага 2 регулируется выходная мощность тягового электродвигателя, а электрическая энергия генератора 6 преобразуется для подачи электрической энергии на приводной механизм, тем самым снижая расход моторного масла и улучшая экономичность.
Следует отметить, что логика и/или этапы, представленные в технологических схемах или иным образом описанные здесь, например, рассматриваемые, как упорядоченные списки исполняемых команд для реализации логических функций, могут быть воплощены на любом машиночитаемом носителе для использования системами, устройствами или оборудованием выполнения команд (например, компьютерная система, система, содержащая процессор, или другие системы, которые могут получать и выполнять команды систем, устройств или оборудования выполнения команд), или в сочетании с этими системами, устройствами или оборудованием выполнения команд. Для целей этой спецификации «машиночитаемый носитель данных» может представлять собой любое устройство, которое может содержать, хранить, осуществлять связь, распространять или передавать программы для использования системами, устройствами или оборудованием выполнения команд или вместе с ними. Более конкретные примеры (неполный список) машиночитаемых носителей данных включают: электрические соединения (электронные устройства) с одним или несколькими проводами, дискеты портативных компьютеров (магнитные устройства), запоминающие устройства с произвольным доступом (RAM), постоянные запоминающие устройства (ROM), стираемые редактируемые постоянные запоминающие устройства (EPROM или флэш-память), оптоволоконные устройства, а также портативные постоянные запоминающие устройства на компактных дисках (CDROM). Кроме того, машиночитаемый носитель данных может представлять собой даже бумагу или другой подходящий носитель, на котором может быть напечатана программа, поскольку программу можно получить в электронном виде, например, путем оптического сканирования бумаги или другого носителя с последующим редактированием, интерпретацией или, при необходимости, обработкой другими подходящими способами, а затем сохранить в памяти компьютера.
Следует понимать, что различные части настоящего изобретения могут быть реализованы с помощью аппаратного обеспечения, программного обеспечения, микропрограммного обеспечения или их комбинации. В вышеупомянутом варианте осуществления множество шагов или способов может быть реализовано с помощью программного обеспечения или микропрограммного обеспечения, хранящегося в памяти и выполняемого подходящей системой выполнения команд. Например, если оно реализовано аппаратно, как в другом варианте осуществления, оно может быть реализовано любой из следующих технологий, известных в данной области техники, или их комбинацией: дискретная логическая схема с логическим вентилем для реализации логической функции на сигнале данных, специальные интегральная схема с подходящей комбинированной схемой логических вентилей, программируемая вентильная матрица (PGA), программируемая пользователем вентильная матрица (FPGA) и т. д.
Вышеизложенное является лишь предпочтительными вариантами осуществления настоящего изобретения. Следует отметить, что для специалистов в данной области, при условии соблюдения технического принципа настоящего изобретения, также могут быть сделаны некоторые усовершенствования и модификации, и эти усовершенствования и модификации также следует рассматривать как объем защиты настоящего изобретения.
Группа изобретений относится к системе и способу управления ходом погрузчика. Система содержит: двигатель, генератор, контроллер и приводной механизм. Генератор передает электрическую энергию на приводной механизм. Генератор подключен к двигателю через входной вал. Контроллер контролирует электрическое подключения педали акселератора и селекторного переключателя. Приводной механизм включает тяговый двигатель и редуктор. Редуктор подключен к выходному валу тягового двигателя. Генератор электрически подключен к тяговому двигателю через контроллер. Контроллер управляет выходной мощностью тягового двигателя в соответствии с сигналом угла педали акселератора. Контроллер управляет двигателем, чтобы он работал в заданном диапазоне скорости вращения, в соответствии с режимом ввода селекторного переключателя. Контроллер включает в себя: центральный контроллер, контроллер генератора и контроллер тягового двигателя. Центральный контроллер связан с ECU двигателя коммуникационным соединением. Контроллер генератора связан с центральным контроллером коммуникационным соединением. Контроллер генератора электрически подключен к генератору. Контроллер тягового двигателя связан с центральным контроллером коммуникационным соединением. Контроллер тягового двигателя электрически подключен к тяговому двигателю. Достигается снижение расхода топлива. 6 н. и 12 з.п. ф-лы, 5 ил.
1. Система управления ходом погрузчика, содержащая:
двигатель;
генератор для передачи электрической энергии на приводной механизм, и подключенный к двигателю через входной вал;
контроллер для электрического подключения педали акселератора и селекторного переключателя;
приводной механизм, включающий тяговый двигатель и редуктор, подключенный к выходному валу тягового двигателя, вышеупомянутый генератор, электрически подключенный к тяговому двигателю через контроллер, для подачи электрической энергии тяговому двигателю;
вышеупомянутый контроллер управляет выходной мощностью тягового двигателя в соответствии с сигналом угла педали акселератора и управляет двигателем, чтобы он работал в заданном диапазоне скорости вращения, в соответствии с режимом ввода селекторного переключателя;
вышеупомянутый контроллер включает в себя:
центральный контроллер, связанный с ECU двигателя коммуникационным соединением;
контроллер генератора, связанный с центральным контроллером коммуникационным соединением, вышеупомянутый контроллер генератора также электрически подключен к генератору;
контроллер тягового двигателя, связанный с центральным контроллером коммуникационным соединением, вышеупомянутый контроллер тягового двигателя также электрически подключен к тяговому двигателю.
2. Система управления ходом погрузчика по п.1, отличающаяся тем, что также включает в себя: рычаг, который связан с центральным контроллером коммуникационным соединением для управления направлением движения и режимом движения приводного механизма.
3. Система управления ходом погрузчика по п.1, отличающаяся тем, что включает в себя четыре тяговых двигателя, каждый из которых индивидуально оснащен контроллером тягового двигателя.
4. Система управления ходом погрузчика по п.1, отличающаяся тем, что приводной механизм также включает в себя датчик, электрически подключенный к центральному контроллеру и тяговому двигателю, и используемый для вывода параметров состояния тягового двигателя на центральный контроллер.
5. Система управления ходом погрузчика по п.1, отличающаяся тем, что также включает в себя индикаторный прибор, связанный с контроллером коммуникационным соединением, и используемый для отображения рабочих параметров транспортного средства в режиме реального времени.
6. Способ управления для применения к контроллеру системы управления ходом погрузчика по п.1, вышеупомянутый способ включает в себя:
в соответствии с режимом вывода селекторного переключателя отправка команд на ECU двигателя для управления двигателем, чтобы он работал в заданном диапазоне скорости вращения;
в соответствии с сигналом угла педали акселератора регулировка выходной мощности тягового двигателя.
7. Способ управления по п.6, в котором режим ввода селекторного переключателя включает режим большой нагрузки и/или режим средней нагрузки и/или режим малой нагрузки;
в режиме большой нагрузки диапазон скорости вращения, устанавливаемый двигателем, составляет ±3% от номинальной скорости вращения;
в режиме средней нагрузки диапазон скорости вращения, устанавливаемый двигателем, составляет ±3% от скорости вращения, соответствующей минимальному значению расхода топлива;
в режиме малой нагрузки диапазон скорости вращения, устанавливаемый двигателем, является диапазоном скорости холостого хода.
8. Способ управления по п.7, отличающийся тем, что
в режиме большой нагрузки номинальная скорость вращения двигателя составляет 2000 об/мин;
в режиме средней нагрузки скорости вращения, соответствующая минимальному значению расхода топлива двигателем составляет 1400 об/мин;
в режиме малой нагрузки скорость вращения холостого хода двигателя не превышает 800 об/мин.
9. Способ управления для применения к контроллеру системы управления ходом погрузчика по п.2, вышеупомянутый способ включает в себя:
в соответствии с режимом вывода селекторного переключателя отправка команд на ECU двигателя для управления двигателем, чтобы он работал в заданном диапазоне скорости вращения;
в соответствии с сигналом угла педали акселератора и сигналом передачи рычага управление выходной мощностью тягового двигателя и преобразование электрической энергии генератора для вывода электрической энергии на приводной механизм, чтобы привести в движение транспортное средство.
10. Способ управления по п.9, в котором режим ввода селекторного переключателя включает режим большой нагрузки и/или режим средней нагрузки и/или режим малой нагрузки;
в режиме большой нагрузки диапазон скорости вращения, устанавливаемый двигателем, составляет ±3% от номинальной скорости вращения;
в режиме средней нагрузки диапазон скорости вращения, устанавливаемый двигателем, составляет ±3% от скорости вращения, соответствующей минимальному значению расхода топлива;
в режиме малой нагрузки диапазон скорости вращения, устанавливаемый двигателем, является диапазоном скорости холостого хода.
11. Способ управления по п.10, отличающийся тем, что
в режиме большой нагрузки номинальная скорость вращения двигателя составляет 2000 об/мин;
в режиме средней нагрузки скорости вращения, соответствующая минимальному значению расхода топлива двигателем составляет 1400 об/мин;
в режиме малой нагрузки скорость вращения холостого хода двигателя не превышает 800 об/мин.
12. Способ управления по п.9, отличающийся тем, что рычаг снабжен передачей переднего хода, нейтральной передачей и передачей заднего хода и используется для вывода сигнала передачи рычага на контроллер путем переключения рычага на разные передачи.
13. Способ управления по п.12, отличающийся тем, что
когда рычаг выдает сигнал переднего или заднего хода, а педаль акселератора выдает сигнал увеличения угла, центральный контроллер управляет контроллером тягового двигателя для подачи мощности на тяговый двигатель, и управляет двигателем для выработки электричества для генератора, чтобы выводить электрическую энергию на тяговый двигатель для движения транспортного средства вперед или назад.
14. Способ управления по п.12, отличающийся тем, что
когда рычаг подает сигнал нейтральной передачи, а педаль акселератора выдает сигнал увеличения угла, центральный контроллер управляет двигателем для выработки электричества для генератора, но прекращает выдачу сигналов на контроллер тягового двигателя, чтобы контроллер тягового двигателя больше не подавал мощность на тяговый двигатель.
15. Способ управления по п.13, отличающийся тем, что, когда рычаг выдает сигнал переднего или заднего хода, а педаль акселератора выдает сигнал угла, угол педали акселератора положительно коррелирует с выходной мощностью контроллера тягового двигателя к тяговому двигателю.
16. Погрузчик, содержащий систему управления ходом погрузчика по любому из пп.1-5.
17. Машиночитаемая память, в которой хранится программа управления погрузчиком, при этом, когда программа управления погрузчиком обрабатывается процессором, реализуется способ управления погрузчиком по любому из пп.6-15.
18. Контроллер транспортного средства, который включает в себя память, процессор и программу управления погрузчиком, которая хранится в памяти и может выполняться на процессоре, при этом, когда процессор выполняет программу управления погрузчиком, реализуется способ управления погрузчиком по любому из пп.6-15.
| CN 113427993 A, 24.09.2021 | |||
| CN 103711170 A, 09.04.2014 | |||
| CN 201133288 Y, 15.10.2008 | |||
| Устройство для дозирования компонентов шихты | 1979 |
|
SU866544A1 |
| US 6190282 B1, 20.02.2001. | |||

