ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к измерителям с вибрирующим элементом и, в частности, к способу и устройству для проверки сборки датчика измерителя с вибрирующим элементом.
Уровень техники изобретения
Вибрационные измерители, такие как, например, измерители плотности жидкости, измерители плотности газа, измерители вязкости жидкости, измерители специфической плотности газа/жидкости, измерители относительной плотности газа/жидкости и измерители молекулярного веса газа, являются общеизвестными и используются для измерения характеристик текучих сред. Как правило, измерители содержат сборку датчика и часть с измерительной электроникой. Материал в пределах сборки датчика может течь или быть стационарным. Каждый тип датчика может иметь уникальные характеристики, которые измеритель должен учитывать для достижения оптимальных характеристик. Например, некоторые датчики могут требовать, чтобы устройство трубки вибрировало с конкретными уровнями смещения. Другие типы узлов датчика могут требовать специальных алгоритмов компенсации.
Измерительная электроника, помимо выполнения других функций, как правило включает в себя сохраненные калибровочные значения датчика для конкретного используемого датчика. Например, измерительная электроника может включать в себя эталонный период времени датчика (то есть величину, обратную эталонной резонансной частоте). Эталонный период времени датчика представляет собой фундаментальную измерительную характеристику геометрии датчика для конкретного сборки датчика, измеренную на заводе в эталонных условиях. Изменение между периодом времени датчика, измеренным после того, как измеритель с вибрирующим элементом установлен на территории клиента, и эталонным периодом времени датчика может представлять собой физическое изменение в сборке датчика из-за покрытия, эрозии, коррозии или повреждения датчика с вибрирующим элементом в дополнение к другим причинам.
Обычно используемая методика для наблюдения изменения периода времени датчика в вибрационных измерителях состоит в выполнении проверки работоспособности в воздушной среде, проверки работоспособности в вакууме или проверки работоспособности с использованием любой текучей среды, имеющей точно известную плотность. В любой из трех методологий проверки работоспособности измеритель берется в отключенном режиме и помещается в условия тестирования. Измеритель иногда очищается перед помещением в условия тестирования или посредством механической или методики, основанной на использовании растворителя. Затем жидкостный или газовый измеритель может быть помещен в вакуум или заполнен текучей средой, имеющей точно известную плотность, такой как воздух или вода. Для жидкостного измерителя условия тестирования обычно включают в себя помещение измерителя в условия окружающего воздуха. Для газового измерителя условия тестирования обычно включают в себя помещение измерителя в условия вакуума. Затем период времени датчика определяется и сравнивается с измеренным эталонным периодом времени датчика.
Как правило, тестовые измерения выполняются в условиях, которые могут отличаться от эталонных условий теста на проверку работоспособности. Поэтому период времени датчика, измеренный во время проверки работоспособности, может отражать вариации в вибрационном отклике не только из-за изменений в сборке датчика, но также и из-за разницы между эталонными условиями и условиями тестирования. Текущие методологии проверки работоспособности не в состоянии выделить изменения в вибрационном отклике из-за изменений в физической сборке датчика и изменений в условиях тестирования.
Например, на измерение периода времени датчика может влиять температура. Первая причина, по которой температура может влиять на период времени датчика, состоит в том, что температура может влиять на жесткость самой сборки датчика. Вторая причина состоит в том, что плотность текучей среды, движущейся в сборке датчика, может зависеть от температуры. Третий механизм, как температура может влиять на корректность проверки работоспособности, заключается в том, что сборка датчика может находиться при нестабильной температуре или может иметься дрейф температуры. Ни один из этих температурных эффектов не учитывается в традиционных методиках проверки работоспособности вибрационного датчика, что может привести к ложным показаниям, что сборка датчика является неисправным или исправным. Ошибки могут привести к неправильным решениям клиентов и ненужным вызовам технической помощи.
Что необходимо, так это обследование работоспособности датчика, которое корректирует вариации в измеренном периоде времени датчика из-за температуры, давления и плотности. Что также необходимо, так это способ для определения, достаточно ли стабильна сборка датчика для обеспечения точного результата проверки работоспособности в воздушной среде, проверки работоспособности в вакууме или проверки работоспособности с использованием другой текучей среды.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Обеспечен измеритель с вибрирующим элементом для проверки работоспособности измерителя. Измеритель с вибрирующим элементом включает в себя сборку датчика, по меньшей мере один температурный датчик и измерительную электронику. Сборка датчика включает в себя вибрирующий элемент, измерительный преобразователь и драйвер, выполненный с возможностью возбуждать вибрации в вибрирующем элементе. Измерительная электроника соединена с измерительным преобразователем, драйвером и по меньшей мере одним температурным датчиком. Измерительная электроника выполнена с возможностью измерять множество температур с использованием по меньшей мере одного температурного датчика. Измерительная электроника дополнительно выполнена с возможностью измерять множество периодов времени датчика с использованием сборки датчика. Измерительная электроника дополнительно выполнена с возможностью определять среднюю температуру по множеству температур. Измерительная электроника дополнительно выполнена с возможностью определять средний период времени датчика по множеству периодов времени датчика. Измерительная электроника дополнительно выполнена с возможностью компенсировать средний период времени датчика с использованием средней температуры для генерации компенсированного периода времени датчика. Измерительная электроника дополнительно выполнена с возможностью сравнивать компенсированный период времени датчика с эталонным периодом времени датчика. Измерительная электроника дополнительно выполнена с возможностью указывать, не превышает ли компенсированный период времени датчика предел ошибки периода времени датчика эталонного периода времени датчика.
Обеспечен способ проверки датчика. Способ включает в себя этап, на котором измеряют множество температур с использованием по меньшей мере одного температурного датчика и множество периодов времени датчика с использованием сборки датчика. Сборка датчика включает в себя вибрирующий элемент, измерительный преобразователь и драйвер, выполненный с возможностью возбуждать вибрации в вибрирующем элементе. Способ дополнительно содержит этап, на котором определяют среднюю температуру по множеству температур. Способ дополнительно содержит этап, на котором определяют средний период времени датчика по множеству периодов времени датчика. Способ дополнительно содержит этап компенсации среднего периода времени датчика с использованием средней температуры для генерации компенсированного периода времени датчика. Способ дополнительно содержит этап сравнения компенсированного периода времени датчика с эталонным периодом времени датчика. Способ дополнительно содержит этап, на котором указывают, не превышает ли компенсированный период времени датчика предел ошибки периода времени датчика эталонного периода времени датчика.
Обеспечен способ для проверки работоспособности датчика. Способ включает в себя этап, на котором измеряют множество температур с использованием по меньшей мере одного температурного датчика и множество периодов времени датчика с использованием сборки датчика. Сборка датчика включает в себя вибрирующий элемент, измерительный преобразователь и драйвер, выполненный с возможностью возбуждать вибрации в вибрирующем элементе. Способ дополнительно содержит этап, на котором вычисляют первое среднеквадратичное отклонение с использованием первого набора данных, содержащих одно из: множество температур или множество периодов времени датчика. Способ дополнительно содержит этап, на котором сравнивают первое среднеквадратичное отклонение с первым пределом. Способ дополнительно содержит этап, на котором указывают, больше ли первое среднеквадратичное отклонение, чем первый предел.
Обеспечен способ для проверки работоспособности датчика. Способ включает в себя этап, на котором измеряют множество температур с использованием по меньшей мере одного температурного датчика и множество периодов времени датчика с использованием сборки датчика. Сборка датчика включает в себя один или несколько вибрирующих элементов, один или несколько измерительных преобразователей и драйвер, выполненный с возможностью возбуждать вибрации в одном или нескольких вибрирующих элементах. Способ дополнительно включает в себя этап, на котором определяют среднюю температуру по множеству температур. Способ дополнительно включает в себя этап, на котором определяют средний период времени датчика по множеству периодов времени датчика. Способ дополнительно включает в себя этап, на котором принимают высоту. Способ дополнительно включает в себя этап, на котором измеряют плотность текучей среды с использованием сборки датчика. Способ дополнительно включает в себя этап, на котором компенсируют период времени датчика с учетом разности плотностей между эталонной плотностью и измеренной плотностью с использованием высоты и средней температуры.
Аспекты приложения
Предпочтительно, измерение множества температур с использованием температурного датчика и множества периодов времени датчика с использованием сборки датчика дополнительно включает в себя очистку сборки датчика.
Предпочтительно, измерение множества температур с использованием температурного датчика и множества периодов времени датчика с использованием сборки датчика дополнительно включает в себя заполнение сборки датчика окружающим воздухом.
Предпочтительно, измерение множества температур с использованием температурного датчика и множества периодов времени датчика с использованием сборки датчика дополнительно включает в себя помещение сборки датчика в вакуум.
Предпочтительно, измерение множества температур с использованием температурного датчика и множества периодов времени датчика с использованием датчика дополнительно включает в себя заполнение сборки датчика или помещение сборки датчика в текучую среду, имеющую точно известную плотность.
Предпочтительно, измерительная электроника дополнительно выполнена с возможностью вычисления среднеквадратичного отклонения с использованием одного из: множества температур или множества периодов времени датчика, сравнения среднеквадратичного отклонения с пределом и указания, больше ли среднеквадратичное отклонение, чем предел.
Предпочтительно, измерительная электроника дополнительно выполнена с возможностью приема высоты и компенсации компенсированного периода времени датчика с использованием высоты.
Предпочтительно, измерительная электроника дополнительно выполнена с возможностью измерения плотности текучей среды с использованием сборки датчика и компенсации компенсированного периода времени датчика с учетом разности плотностей между эталонной плотностью и измеренной плотностью с использованием высоты и средней температуры.
Предпочтительно, способ дополнительно включает в себя этапы, на которых вычисляют второе среднеквадратичное отклонение с использованием второго набора данных, содержащего одно из: множество температур или множество периодов времени датчика, при этом первый набор данных отличается от второго набора данных, сравнивают второе среднеквадратичное отклонение со вторым пределом и указывают, больше ли второе среднеквадратичное отклонение, чем второй предел.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Одинаковые ссылочные позиции представляют собой один и тот же элемент на всех чертежах. Чертежи не обязательно выполнены в масштабе.
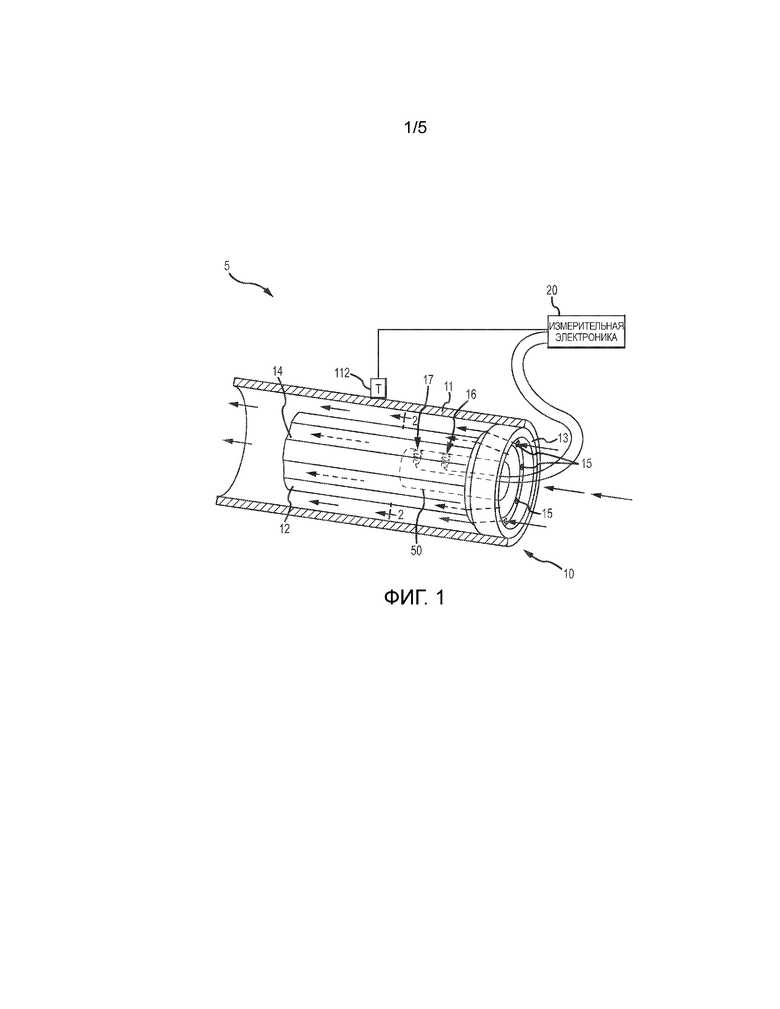
Фиг. 1 изображает измеритель 5 с вибрирующим элементом в соответствии с вариантом воплощения изобретения.
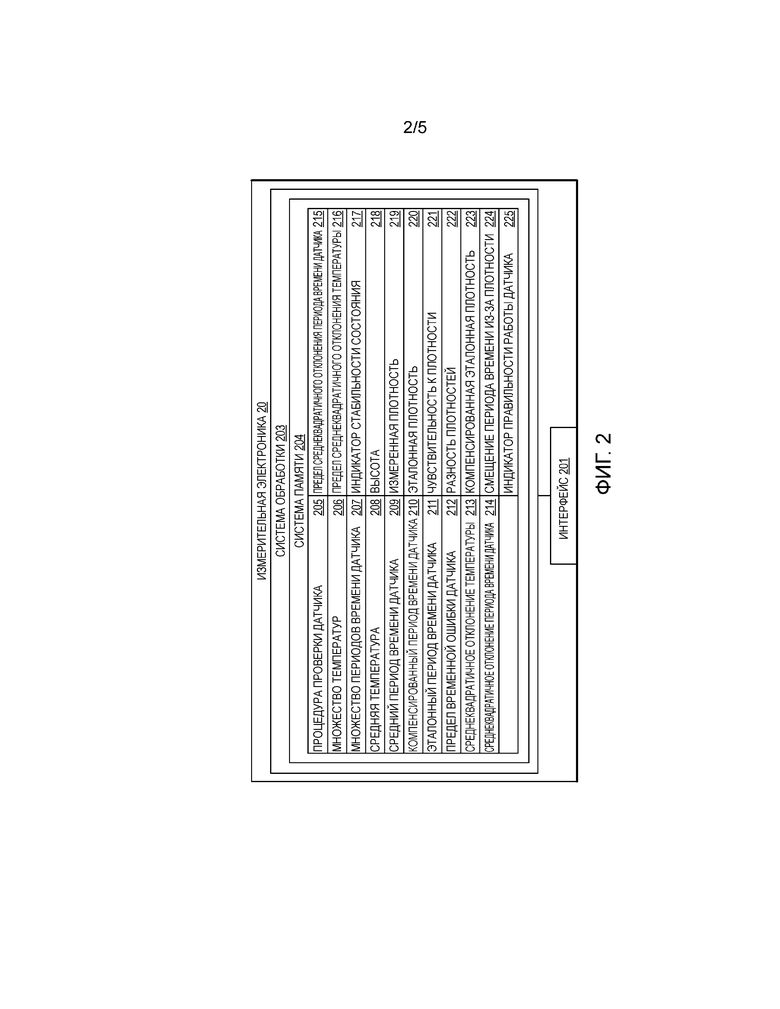
Фиг. 2 изображает измерительную электронику 20 в соответствии с вариантом воплощения изобретения.
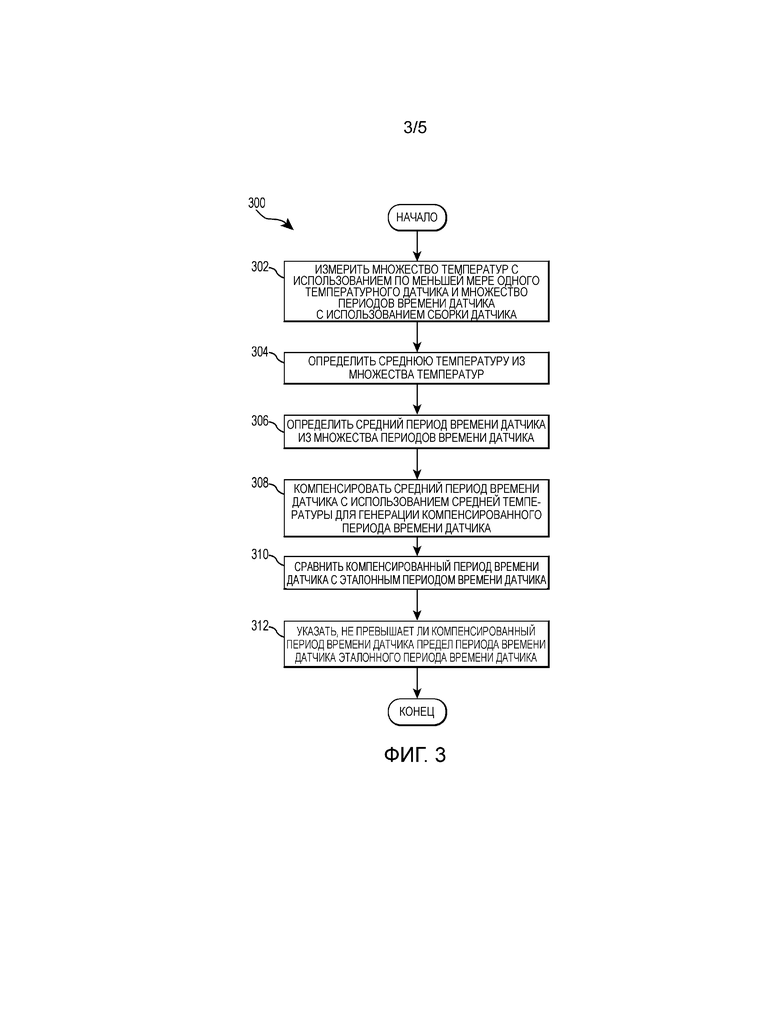
Фиг. 3 изображает способ 300 в соответствии с вариантом воплощения изобретения.
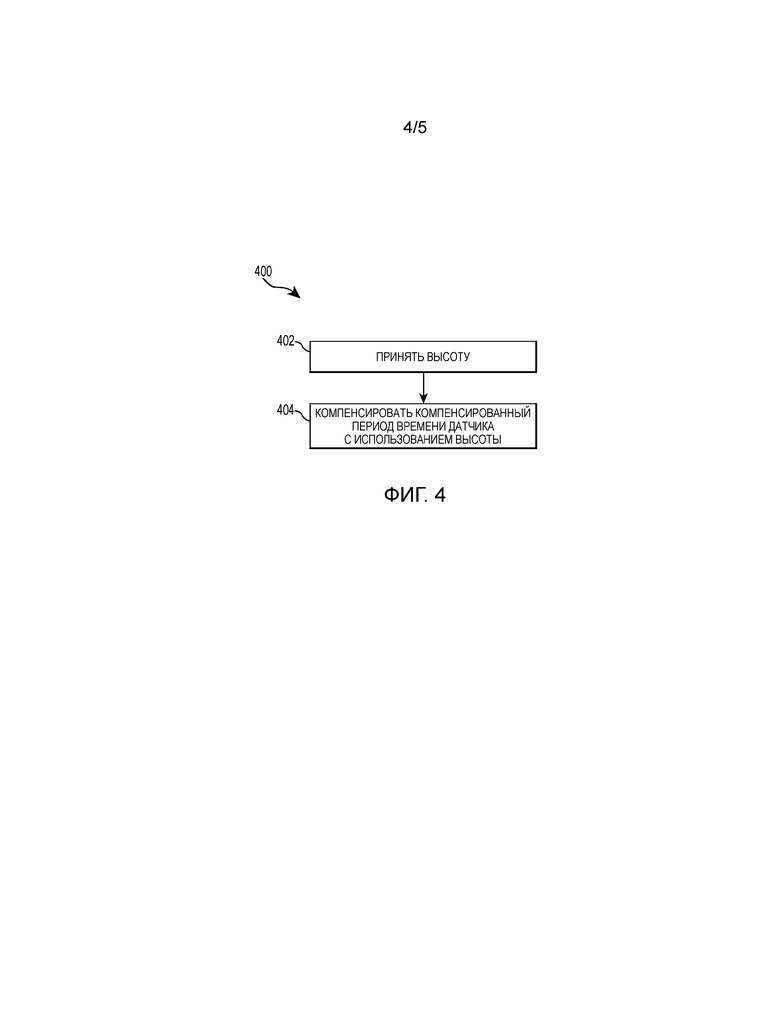
Фиг. 4 изображает способ 400 в соответствии с вариантом воплощения изобретения.
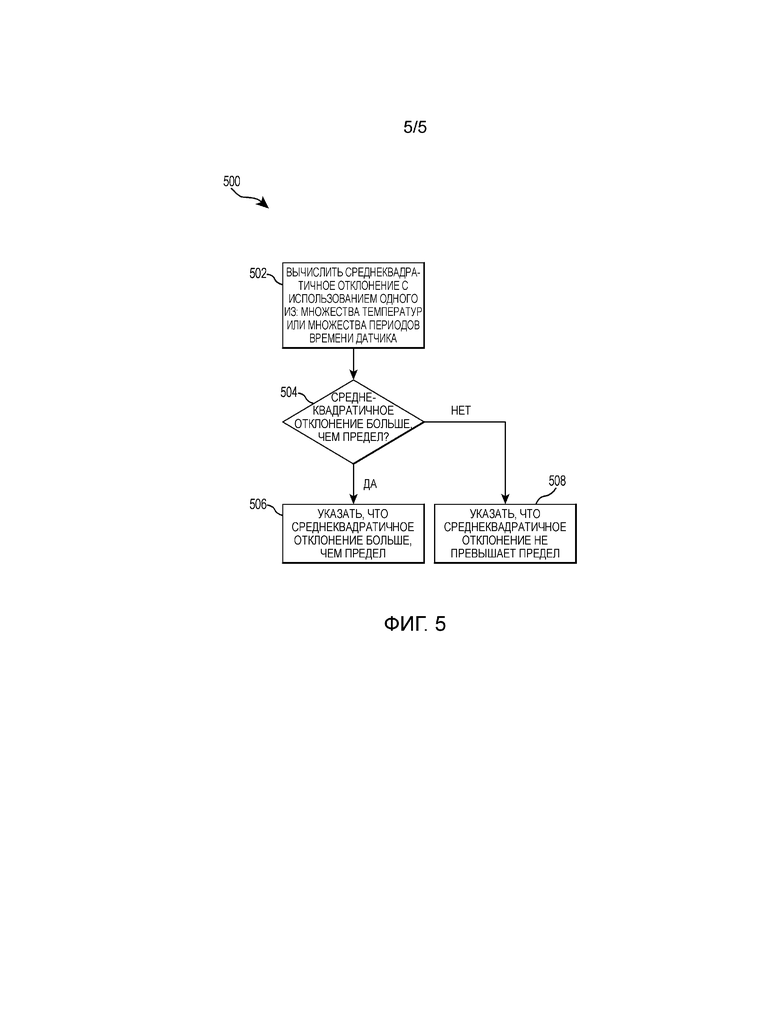
Фиг. 5 изображает способ 500 в соответствии с вариантом воплощения изобретения.
Подробное описание
Фиг. 1-5 и последующее описание изображают конкретные примеры для обучения специалистов в области техники, как сделать и использовать наилучший вариант изобретения. С целью обучения принципам изобретения некоторые известные аспекты были упрощены или опущены. Специалистам в области техники будут понятны вариации этих примеров, которые находятся в пределах объема изобретения. Специалистам в области техники будет понятно, что признаки, описанные ниже, могут сочетаться различным образом для формирования множества вариантов изобретения. В результате изобретение не ограничивается конкретными примерами, описанными ниже, а ограничивается только формулой изобретения и ее эквивалентами.
Фиг. 1 показывает измеритель 5 с вибрирующим элементом, измеритель плотности. Измеритель 5 с вибрирующим элементом содержит сборку 10 датчика и измерительную электронику 20. Вариант воплощения измерителя плотности, однако, не является ограничивающим. Специалисты в области техники с легкостью поймут, что варианты воплощения изобретения, описанного в настоящем документе, могут быть применены к проверке измерителей плотности жидкости, измерителей плотности газа, измерителей вязкости жидкости, измерителей специфической плотности газа/жидкости, измерителей относительной плотности газа/жидкости, измерителей молекулярного веса газа и/или любого типа вибрационного измерителя.
Измеритель 5 с вибрирующим элементом может быть выполнен с возможностью измерять плотность текучей среды, такой как, например, жидкость или газ. Измеритель 5 с вибрирующим элементом включает в себя корпус 11 с вибрирующим элементом 12, расположенным по меньшей мере частично в корпусе 11. Часть корпуса 11 срезана, чтобы показать вибрирующий элемент 12. Измеритель 5 с вибрирующим элементом может быть, например, встроен прямоточным образом в существующем трубопроводе. Альтернативно, корпус 11 может содержать, например, закрытые концы с отверстиями для приема образца текучей среды. Поэтому, хотя фланцы не показаны, во многих случаях корпус 11 или вибрирующий элемент 12 может включать в себя фланцы или другие элементы для функционального соединения измерителя 5 с вибрирующим элементом с трубопроводом или аналогичным устройством доставки текучей среды герметичным образом. В соответствии с показанным примером вибрирующий элемент 12 является кантилевером, закрепленным на корпусе 11. Вибрирующий элемент 12 показан соединенным с корпусом 11 у входного конца 13 со свободно вибрирующим выходным концом 14.
В соответствии с показанным примером вибрирующий элемент 12 также включает в себя множество отверстий 15 для текучей среды вблизи от входного конца 13. Отверстия 15 для текучей среды могут быть обеспечены для того, чтобы позволять части текучей среды поступать в измеритель 5 с вибрирующим элементом и течь между корпусом 11 и вибрирующим элементом 12. Поэтому текучая среда контактирует как с внутренней, так и с внешней поверхностями вибрирующего элемента 12. Это особенно полезно, когда тестируемая текучая среда содержит газ, потому что большая площадь поверхности подвергается воздействию газа. В других примерах отверстия могут быть обеспечены в корпусе 11, чтобы тестируемая текучая среда воздействовала на наружную поверхность вибрирующего элемента 12, и поэтому нет необходимости в отверстиях 15 в вибрирующем элементе 12.
Дополнительно на фиг. 1 показан драйвер 16 и измерительный преобразователь 17, расположенный в цилиндре 50. Драйвер 16 и измерительный преобразователь 17 показаны включающими в себя катушки, которые хорошо известны в области техники. Если в катушку подается электрический ток, в вибрирующем элементе 12 индуцируется магнитное поле, заставляющее вибрирующий элемент 12 вибрировать. С другой стороны, вибрация вибрирующего элемента 12 индуцирует напряжение в измерительном преобразователе 17. Драйвер 16 принимает возбуждающий сигнал от измерительной электроники 20 для возбуждения вибрации вибрирующего элемента 12 на одной из его резонансных частот в одном из множества типов колебаний, в том числе, например, простом изгибном, крутильном, радиальном или связанном типе. Измерительный преобразователь 17 обнаруживает вибрацию вибрирующего элемента 12, в том числе частоту, с которой вибрирующий элемент 12 вибрирует, и отправляет информацию о вибрации измерительной электронике 20 для обработки. Когда вибрирующий элемент 12 вибрирует, текучая среда, контактирующая со стенкой вибрирующего элемента, вибрирует вместе с вибрирующим элементом 12. Присоединенная масса текучей среды, контактирующей с вибрирующим элементом 12, понижает резонансную частоту. Новая, более низкая резонансная частота вибрирующего элемента 12 используется для определения плотности текучей среды, как общеизвестно в области техники, например, в соответствии с ранее определенной корреляцией.
Измеритель 5 с вибрирующим элементом дополнительно включает в себя температурный датчик 112. В вариантах воплощения температурный датчик 112 соединен с корпусом 11. Однако в других вариантах воплощения температурный датчик 112 может быть соединен с драйвером 16, измерительным преобразователем 17, входом 13 или любой другой частью сборки 10 датчика. В вариантах воплощения измеритель 5 с вибрирующим элементом может включать в себя более чем один температурный датчик, и каждый соответствующий температурный датчик может быть соединен с одним и тем же или различными компонентами сборки 10 датчика. Один или несколько сигналов, обеспеченных температурными датчиками 112, могут объединяться любым образом, общеизвестным специалистам в области техники, для генерации одного или нескольких значений измерения температуры.
Фиг. 2 изображает измерительную электронику 20 5 с вибрирующим элементом в соответствии с вариантом воплощения изобретения. Измерительная электроника 20 может включать в себя интерфейс 201 и систему 203 обработки. Система 203 обработки может включать в себя систему 204 памяти. Как обсуждалось ранее, измерительная электроника20 может генерировать возбуждающий сигнал для подачи драйверу 16 и принимать сигналы от измерительного преобразователя 17 и температурного датчика 112. В некоторых вариантах воплощения измерительная электроника 20 может принимать сигналы от драйвера 16. Измерительная электроника 20 может эксплуатировать сборку 10 датчика как измеритель плотности, измеритель вязкости или расходометр, такой как массовый расходомер Кориолиса. Следует принять во внимание, что измерительная электроника 20 может также эксплуатировать другие типы вибрационных измерителей, и конкретные обеспеченные примеры не должны ограничивать объем настоящего изобретения. Измерительная электроника20 может обрабатывать сигналы вибрационного датчика для получения одной или нескольких характеристик материала в корпусе 11.
Интерфейс 201 может принимать сигналы датчика от драйвера 16, измерительного преобразователя 17 или температурного датчика 112 по проводам. Интерфейс 201 может выполнять любое необходимое или желаемое предварительное формирование сигнала, такое как любой способ форматирования, усиления, буферизации и т.д. Альтернативно, часть или все предварительное формирование сигнала может выполняться в системе 203 обработки. Кроме того, интерфейс 201 может обеспечивать связь между измерительной электроникой20 и внешними устройствами. Интерфейс 201 может быть способен осуществлять любой вид электронной, оптической или беспроводной связи. Кроме того, интерфейс 201 может, например, обеспечивать связь между измерительной электроникой20 и внешними устройствами. Интерфейс 201 может быть способен осуществлять любой вид электронной, оптической или беспроводной связи.
Интерфейс 201 в одном варианте воплощения может включать в себя оцифровщик (не показан), при этом сигналы сборки 10 датчика содержат аналоговые сигналы датчика. Оцифровщик может квантовать и оцифровывать аналоговые сигналы датчика и производить цифровые сигналы датчика. Оцифровщик может также выполнять любое необходимое прореживание, при этом цифровой сигнал датчика прореживается, чтобы уменьшить величину необходимой обработки сигнала и уменьшать время обработки.
Система 203 обработки производит операции измерительной электроники 20 и обрабатывает измерения плотности/вязкости/расхода от сборки 10 датчика. Система 203 обработки может также исполнять одну или несколько процедур обработки, таких как процедура 205 проверки датчика.
Система 203 обработки может содержать универсальный компьютер, микропроцессорную систему, логическую схему или любое другое универсальное или специализированное устройство обработки, способное выполнять функции, описанные в настоящем документе. Система 203 обработки может быть распределена между несколькими устройствами обработки. Система 203 обработки может включать в себя любой вид интегрального или независимого электронного накопителя данных, такого как система 204 памяти.
Система 204 памяти может хранить параметры и данные измерителя, программное обеспечение, величины констант и значения переменных. Система 204 памяти может содержать основную или главную память, такую как память с произвольным доступом (RAM). В вариантах воплощения система 204 памяти может включать в себя привод жесткого диска, съемное запоминающее устройство, карту памяти, привод гибких дисков, привод магнитной ленты, привод компакт-дисков, цифровой универсальный диск, диск Blue-ray, оптическое запоминающее устройство, устройство резервного копирования на магнитную ленту или любой другой накопитель данных, который может использоваться или считываться компьютером.
Следует понимать, что измерительная электроника 20 может включать в себя различные другие компоненты и функции, которые являются общеизвестными в области техники. Эти дополнительные признаки опущены в описании и на фигурах для краткости. Поэтому настоящее изобретение не должно ограничиваться конкретными показанными и обсуждаемыми вариантами воплощения.
Хотя фиг. 1 изображает только одну сборку 10 датчика, осуществляющего связь с измерительной электроникой 20, специалистам в области техники будет понятно, что несколько узлов датчиков могут осуществлять связь с измерительной электроникой 20. Кроме того, измерительная электроника 20 может быть способна эксплуатировать множество различных типов датчика. Поэтому важно подтвердить, что конкретные узлы датчиков, осуществляющие связь с измерительной электроникой 20, содержат правильно работающие датчики. Каждая сборка датчика, такая как сборка 10 датчика, осуществляющего связь с измерительной электроникой 20, может иметь соответствующую секцию системы 204 памяти, посвященную проверке работоспособности в воздушной среде, вакууме или текучей среде. Например, если сборка датчика содержит измеритель плотности, как в примере сборки 10 датчика, калибровочные значения могут включать в себя значение периода времени датчика в эталонных условиях. Другие калибровочные значения датчика также предполагаются и включены в объем настоящего изобретения.
Система 204 памяти хранит переменные, которые могут использоваться процедурой 205 проверки датчика для проверки работоспособности сборки 10 датчика. Например, система 204 памяти хранит множество температур 206 и множество периодов 207 времени датчика. Множество температур 206 может быть определено путем получения временнòй последовательности измерений по меньшей мере от одного температурного датчика 112. Множество периодов 207 времени датчика может быть определено путем возбуждения сборки датчика на его собственной частоте и определения величины, обратной частоте наибольшего отклика. В примере сборки 10 датчика драйвер 16 может заставлять осциллировать вибрирующий элемент 12, генерируя сигналы в измерительном преобразователе 17, которые могут использоваться для определения последовательности периодов времени датчика для сборки 10 датчика. В вариантах воплощения каждая температура из множества температур 206 может соответствовать соответствующему периоду времени датчика из множества периодов 207 времени датчика. Например, каждая соответствующая температура из множества температур 206 и каждый соответствующий период времени датчика из множества периодов 207 времени датчика могут быть измерены с интервалами в 1 секунду в течение периода в 20 секунд.
Система 204 памяти также хранит среднюю температуру 208 и средний период 209 времени датчика. Средняя температура 208 может быть определена путем усреднения множества температур 206. Средний период 209 времени датчика может быть определен путем усреднения множества периодов 207 времени датчика.
Система 204 памяти также хранит компенсированный период 210 времени датчика. Компенсированный период 210 времени датчика является значением, которое было скорректировано с учетом одного или нескольких физических факторов, которые могут влиять на измерение периода времени датчика, таких как любая комбинация температуры, давления, высоты и плотности.
Компенсированный период 210 времени датчика для сборки 10 датчика может быть скомпенсирован с учетом температуры. Например, по меньшей мере один температурный датчик 112 может указывать, что сборка 10 датчика имеет другую температуру, чем эталонная калибровочная температура. В вариантах воплощения эталонная калибровочная температура может быть равна 20°C. Температура может влиять на жесткость сборки 10 датчика, приводя к смещению измеренного периода времени датчика. В варианте воплощения компенсированный период 210 времени датчика может быть определен путем вычисления смещения для среднего периода 209 времени датчика на основании средней температуры 208.
В варианте воплощения плотность окружающего воздуха может быть измерена во время проверки работоспособности в воздушной среде. На измеренный период времени датчика могут дополнительно влиять разность атмосферного давления между эталонными условиями на заводе и территории клиента. Разность атмосферного давления между эталонными условиями и территорией клиента могут быть из-за разностей высоты между испытательными площадками. В вариантах воплощения эталонное атмосферное давление может быть равно 101.325 kPa. Колебания давления из-за изменения погоды могут также присутствовать, но они менее значимы, чем изменения давления из-за высоты. Когда проверка работоспособности выполняется с помощью газа, который имеет другое давлением, чем эталонное давление газа, разность в давлении может создать смещение измеренного периода времени датчика.
Система 204 памяти может дополнительно включать в себя высоту 218, измеренную плотность 219, эталонную плотность 220, чувствительность 221 к плотности, разность 222 плотностей, компенсированную эталонную плотность 223 и смещение периода 224 времени из-за плотности. Высота 218 может представлять собой высоту, где установлен датчик. В вариантах воплощения высота 218 может быть введена пользователем и сохранена в системе 204 памяти. Например, высота 218 может быть введена в начале проверки работоспособности, при установке датчика на территории клиента или в любое другое время. В других вариантах воплощения высота 218 может быть принята с помощью электронного сообщения в измерительной электронике 20.
Измеренная плотность 219 может быть измерена во время проверки работоспособности с использованием сборки 10 датчика, как было описано выше. Эталонная плотность 220 может быть плотностью, измеренной измерителем 5 с вибрирующим элементом в эталонных условиях с окружающим атмосферным газом. Эталонная плотность 220 может быть скомпенсирована с учетом изменений плотности из-за высоты, температуры и давления для генерации компенсированной эталонной плотности 223:
В приведенном выше уравнении 








где h представляет собой высоту испытательной площадки в метрах.
В дополнительном варианте воплощения измеренная плотность 219 может быть скомпенсирована с учетом эталонной высоты, температуры и давления.
Чувствительность 221 к плотности и разность 222 плотностей может использоваться для вычисления смещения 224 периода времени из-за плотности. Разность 222 плотностей представляет собой разность между компенсированной эталонной плотностью 223 и измеренной плотностью 219. Однако изобретение не ограничивается этим. В других вариантах воплощения разность 222 плотностей может представлять собой разность между эталонной плотностью и измеренной плотностью, скомпенсированную с учетом эталонной высоты, давления и температуры.
Чувствительность 221 к плотности является мерой точности измерителя в зависимости от материала в измерителе и определяется следующим образом для измерителя плотности вилочного типа:
Чувствительность к плотности = K1+2×K2×(скомпенсированный с учетом температуры период времени датчика).
Чувствительность 221 к плотности определяется следующим образом для измерителя плотности газа:
Чувствительность к плотности = 2×K2×(скомпенсированный с учетом температуры период времени датчика).
В обоих вышеупомянутых уравнениях для чувствительности к плотности K1 и K2 представляют собой калибровочные константы, которые могут быть определены во время процесса калибровки измерителя. Например, K1 и K2 могут быть определены с помощью процесса калибровки с использованием двух различных текучих среды, которые имеют плотность, известную с высокой точностью.
Смещение 224 периода времени из-за плотности является смещением, которое может быть приписано разности плотностей текучих сред при проверке работоспособности и плотности этой текучей среды в эталонных условиях. Смещение 224 периода времени из-за плотности может быть определено с помощью следующего уравнения:

В вариантах воплощения смещение 224 периода времени из-за плотности может использоваться для дополнительной компенсации компенсированного периода 210 времени датчика. В других вариантах воплощения смещение 224 периода времени из-за плотности может использоваться для компенсации среднего периода 209 времени датчика или любого из множества периодов 207 времени датчика.
Система 204 памяти может дополнительно хранить эталонный период 211 времени датчика и предел 212 временнòй ошибки датчика. В вариантах воплощения эталонный период 211 времени датчика может быть измерен на заводе в эталонных условиях, прежде чем сборка датчика будет поставлена клиенту. В других вариантах воплощения эталонный период 211 времени датчика может представлять собой эталонное значение, определенное, когда измеритель установлен или сконфигурирован на территории клиента. Эталонный период 211 времени датчика может соответствовать эталонному давлению, температуре, высоте и/или плотности текучей среды. В варианте воплощения эталонный период 211 времени датчика может быть определен с помощью вибрирующих элементов датчика, заполненного окружающим газом на уровне моря. В других вариантах воплощения эталонный период 211 времени датчика может быть определен с помощью вибрирующих элементов датчика в вакууме. В дополнительных вариантах воплощения эталонный период 211 времени датчика может быть определен при любой комбинации температуры и давления и может включать в себя любую эталонную среду. Например, в качестве эталонной среды может использоваться вода.
Предел 212 временнòй ошибки датчика представляет собой максимальную допустимую разность между эталонным периодом 211 времени датчика и компенсированным периодом 210 времени датчика, допустимую для обеспечения определения правильности работы датчика измерителя.
Система 204 памяти может дополнительно включать в себя индикатор 225 правильности работы датчика. Индикатор 225 правильности работы датчика может быть задан после определения, меньше ли разность между компенсированным периодом 210 времени датчика и эталонным периодом 211 времени датчика, чем предел 212 временнòй ошибки датчика. Индикатор 225 правильности работы датчика может указывать, может ли сборка 10 датчика обеспечивать точные измерения массового расхода, плотности, вязкости или какого-либо другого измерения. В вариантах воплощения измерительная электроника 20 может указывать статус индикатора 225 правильности работы датчика путем переключения лампочки или дисплея на измерителе 5 с вибрирующим элементом. В других вариантах воплощения измерительная электроника 20 может указывать, что сборка 10 датчика работает правильно, путем отправки электронного отчета другому вычислительному устройству.
При определении правильности работы сборки датчика с помощью существующих методологий проверки работоспособности стабильность датчика может обеспечивать дополнительное ограничение для получения точных результатов. Измеритель, который находится в нестабильном или не установившемся состоянии, может обеспечить измерения периода времени датчика, которые отклоняются в широком диапазоне значений, обеспечивая ложные результаты. Система 204 памяти дополнительно включает в себя среднеквадратичное отклонение 213 температуры, среднеквадратичное отклонение 214 периода времени датчика, предел 215 среднеквадратичного отклонения периода времени датчика, предел 216 среднеквадратичного отклонения температуры и индикатор 217 стабильности состояния для преодоления этого возможного ограничения. Среднеквадратичное отклонение 213 температуры представляет собой среднеквадратичное отклонение множества температур 206. Среднеквадратичное отклонение 214 периода времени датчика представляет собой среднеквадратичное отклонение множества периодов 207 времени датчика.
Предел 216 среднеквадратичного отклонения температуры может представлять собой максимальное среднеквадратичное отклонение 213 температуры, которое может указывать стабильный датчик. Среднеквадратичное отклонение 213 температуры может повыситься, когда температура сборки 10 датчика изменяется быстро. Когда среднеквадратичное отклонение 213 температуры больше, чем предел 216 среднеквадратичного отклонения температуры, вибрационный измеритель может не иметь возможности обеспечить надежные измерения, и проверка работоспособности не может привести к точным результатам.
Среднеквадратичное отклонение 214 периода времени датчика может повыситься в силу многих причин, в том числе когда условия окружающей среды или тестирования изменяются быстро. Предел 215 среднеквадратичного отклонение периода времени датчика может представлять собой максимальное среднеквадратичное отклонение периода времени датчика, которое может указать стабильный датчик. Когда среднеквадратичное отклонении 214 периода времени датчика больше, чем предел 215 среднеквадратичного отклонения период времени датчика, тогда вибрационный измеритель может не иметь возможности обеспечить надежные измерения, и проверка работоспособности не может привести к точным результатам.
Индикатор 217 стабильности состояния может указывать, определено ли, что датчик стабилен. В вариантах воплощения индикатор 217 стабильности состояния может быть указан на лампочке или другом дисплее для пользователя. В других вариантах воплощения индикатор 217 стабильности состояния может быть отправлен через электронный отчет другому вычислительному устройству.
В варианте воплощения система 204 памяти включает в себя процедуры, которые исполняются системой 203 обработки. Например, система 204 памяти хранит процедуру 205 проверки датчика. Измерительная электроника 20 может инициировать и управлять процедурой 205 проверки датчика для проверки сборки 10 датчика. В вариантах воплощения процедура 205 проверки датчика может выполнять проверку работоспособности для определения правильности работы сборки датчика и указывать результаты с помощью индикатора 225 правильности работы датчика, используя способы, обсуждавшиеся выше. В других вариантах воплощения процедура 205 проверки датчика может определять, обеспечивает ли сборка 10 датчика стабильные измерения, и указывать результаты с помощью индикатора 217 стабильности состояния, как было описано выше.
Фиг. 3-5 изображают, соответственно, способы 300, 400 и 500 проверки датчика. Способы 300, 400 и 500 проверки датчика представляют собой иллюстративные варианты воплощения процедуры 205 проверки датчика. Система 203 обработки может быть выполнена с возможностью выполнения необходимой обработки сигнала и данных для исполнения процедуры 205 проверки датчика, которая может включать в себя выполнение любой комбинации способов 300, 400 и 500 проверки датчика.
Способ 300 проверки датчика на фиг. 3 начинается с этапа 302. На этапе 302 измеряется множество температур с использованием по меньшей мере одного температурного датчика, и измеряется множество периодов времени датчика с использованием сборки 10 датчика. Например, множество температур 206 может быть измерено с использованием температурного датчика 112. В вариантах воплощения множество температур 206 может быть измерено с использованием более чем одного температурного датчика, соединенного с любой частью сборки 10 датчика. Множество периодов 207 времени датчика может быть определено с помощью вибрирующего драйвера 16 и приема вибрационного отклика с помощью измерительного преобразователя 17 в измерительной электронике 20.
В вариантах воплощения этап 302 может дополнительно включать в себя очистку сборки 10 датчика. Например, внутренняя или внешняя часть корпуса 11, вибрирующий элемент 12, входной конец 13, отверстия 15 для текучей среды, драйвер 16, измерительный преобразователь 17 или цилиндр 50 могут очищаться с помощью растворителя или любым другим способом, являющимся общеизвестным специалистам в области техники.
В вариантах воплощения этап 302 может дополнительно включать в себя заполнение сборки 10 датчика окружающим воздухом.
В вариантах воплощения этап 302 может дополнительно включать в себя помещение сборки 10 датчика в вакуум.
В вариантах воплощения этап 302 может дополнительно включать в себя заполнение сборки 10 датчика текучей средой, имеющей точно известную плотность. Например, сборка датчика может заполняться водой.
Способ 300 продолжается на этапе 304. На этапе 304 определяется средняя температура по множеству температур. Например, средняя температура 208 может быть определена путем усреднения множества температур 206, как было описано выше.
Способ 300 продолжается на этапе 306. На этапе 306 определяется средний период времени датчика по множеству периодов времени датчика. Например, средний период 209 времени датчика может быть определен путем усреднения множества периодов 207 времени датчика, как было описано выше.
Способ 300 продолжается на этапе 308. На этапе 308 средний период времени датчика компенсируются с использованием средней температуры для генерации компенсированного периода времени датчика. Например, средний период 209 времени датчика может быть скомпенсирован с использованием средней температуры 208 для генерации компенсированного периода 210 времени датчика, как было описано выше.
Способ 300 продолжается на этапе 310. На этапе 310 компенсированный период времени датчика сравнивается с эталонным периодом времени датчика. Например, компенсированный период 210 времени датчика может сравниваться с эталонным периодом 211 времени датчика, как было описано выше.
Способ 300 продолжается на этапе 312. На этапе 312 указывается, не превышает ли компенсированный период времени датчика предел ошибки периода времени датчика эталонного периода времени датчика. Например, может указываться, не превышает ли компенсированный период 210 времени датчика предел 212 временнòй ошибки датчика эталонного периода 211 времени датчика, как было описано выше.
В вариантах воплощения в дополнение к способу 300 может выполняться способ 400 проверки датчика. Способ 400 на фиг. 4 начинается с этапа 402. На этапе 402 принимается значение высоты. Высота является высотой местоположения датчика над уровнем моря. Например, может быть принята высота 218, как было описано выше.
Способ 400 продолжается на этапе 404. На этапе 404 компенсированный период времени датчика компенсируется с использованием высоты. Например, компенсированный период 210 времени датчика может быть скомпенсирован с использованием высоты 218, как было описано выше.
В вариантах воплощения этап 404 может дополнительно включать в себя измерение плотности текучей среды с использованием сборки датчика и компенсацию компенсированного периода времени датчика с учетом разности плотностей между эталонной плотностью и измеренной плотностью с использованием высоты. Например, измеренная плотность 219 может быть измерена с использованием сборки 10 датчика. Высота 218 может использоваться для компенсации любого из множества периодов 207 времени датчика, среднего периода 209 времени датчика или компенсированного периода 210 времени датчика, как было описано выше.
В вариантах воплощения в дополнение к способам 300 и/или 400 может выполняться способ 500 проверки датчика. Как изображено на фиг. 5, способ 500 начинается с этапа 502. На этапе 502 вычисляется среднеквадратичное отклонение с использованием одного из: множества температур или множества периодов времени датчика. Например, среднеквадратичное отклонение 213 температуры может быть вычислено с использованием множества температур 206, или среднеквадратичное отклонение 214 периода времени датчика может быть вычислено с использованием множества периодов 207 времени датчика, как было описано выше.
Способ 500 продолжается на этапе 504. На этапе 504 определяется, больше ли среднеквадратичное отклонение, чем предел. Например, может быть определено, больше ли среднеквадратичное отклонение 213 температуры, чем предел 216 среднеквадратичного отклонения температура, или может быть определено, больше ли среднеквадратичное отклонение 214 периода времени датчика, чем предел 215 среднеквадратичного отклонения периода времени датчика, как было описано выше. В вариантах воплощения способ 500 может быть выполнен дважды путем вычисления каждого из: среднеквадратичного отклонения 213 температуры и среднеквадратичного отклонения 214 периода времени датчика.
Если на этапе 504 было определено, что среднеквадратичное отклонение больше, чем предел, способ 500 продолжается на этапе 506. Если на этапе 504 было определено, что среднеквадратичное отклонение не превышает предел, способ 500 продолжается на этапе 508. На этапе 506 указывается, что состояние является нестабильным. На этапе 508 указывается, что состояние является стабильным. Например, индикатор 217 стабильности состояния может использоваться для указания, стабильно ли состояние сборки 10 датчика. В варианте воплощения измерительная электроника20 может указывать, устойчиво ли состояние, путем переключения индикаторной лампочки или иного обеспечения отображения для пользователя. В другом варианте воплощения измерительная электроника20 может указывать, устойчиво ли состояние, путем отправления электронного отчета. Другие способы указания стабильности сборки 10 датчика также предусматриваются этим изобретением, как будет понятно специалистам в области техники.
Подробные описания вышеупомянутых вариантов воплощения не являются исчерпывающими описаниями всех вариантов воплощения, которые находятся в пределах объема изобретения, как это предполагается авторами изобретения. Действительно, специалистам в области техники будет понятно, что определенные элементы вышеописанных вариантов воплощения могут быть по-разному скомбинированы или убраны для создания дополнительных вариантов воплощения, и такие дополнительные варианты воплощения попадают в рамки объема и идей изобретения. Специалистам в области техники также будет очевидно, что вышеописанные варианты воплощения могут быть объединены целиком или частично для создания дополнительных вариантов воплощения в пределах объема и идей изобретения.
Таким образом, хотя конкретные варианты воплощения и примеры изобретения описаны в настоящем документе с иллюстративными целями, в рамках объема изобретения возможны различные эквивалентные модификации, как будет понятно специалистам в соответствующей области техники. Идеи, обеспеченные в настоящем документе, могут быть применены к другим измерителям, а не только к вариантам воплощения, описанным выше и показанным на прилагаемых фигурах. Соответственно, объем изобретения должен определяться прилагаемой формулой изобретения.
Использование: для проверки вибрационного датчика. Сущность изобретения заключается в том, что измеряют множество температур с использованием температурного датчика и измеряют множество периодов времени датчика с использованием сборки датчика. Определяют среднюю температуру и средний период времени датчика. Компенсируют средний период времени датчика с использованием средней температуры, генерируя при этом компенсированный период времени датчика. Сравнивают компенсированный период времени датчика с эталонным периодом времени датчика. Указывают результаты. В дополнительных вариантах воплощения среднеквадратичное отклонение множества температур или множества периодов времени датчика сравнивается с пределом и указывается стабильность датчика. В дополнительных вариантах воплощения разность между измеренной плотностью и эталонной плотностью текучей среды компенсируется с использованием высоты и средней температуры. Технический результат: повышение достоверности результатов проверки вибрационного датчика. 4 н. и 15 з.п. ф-лы, 5 ил.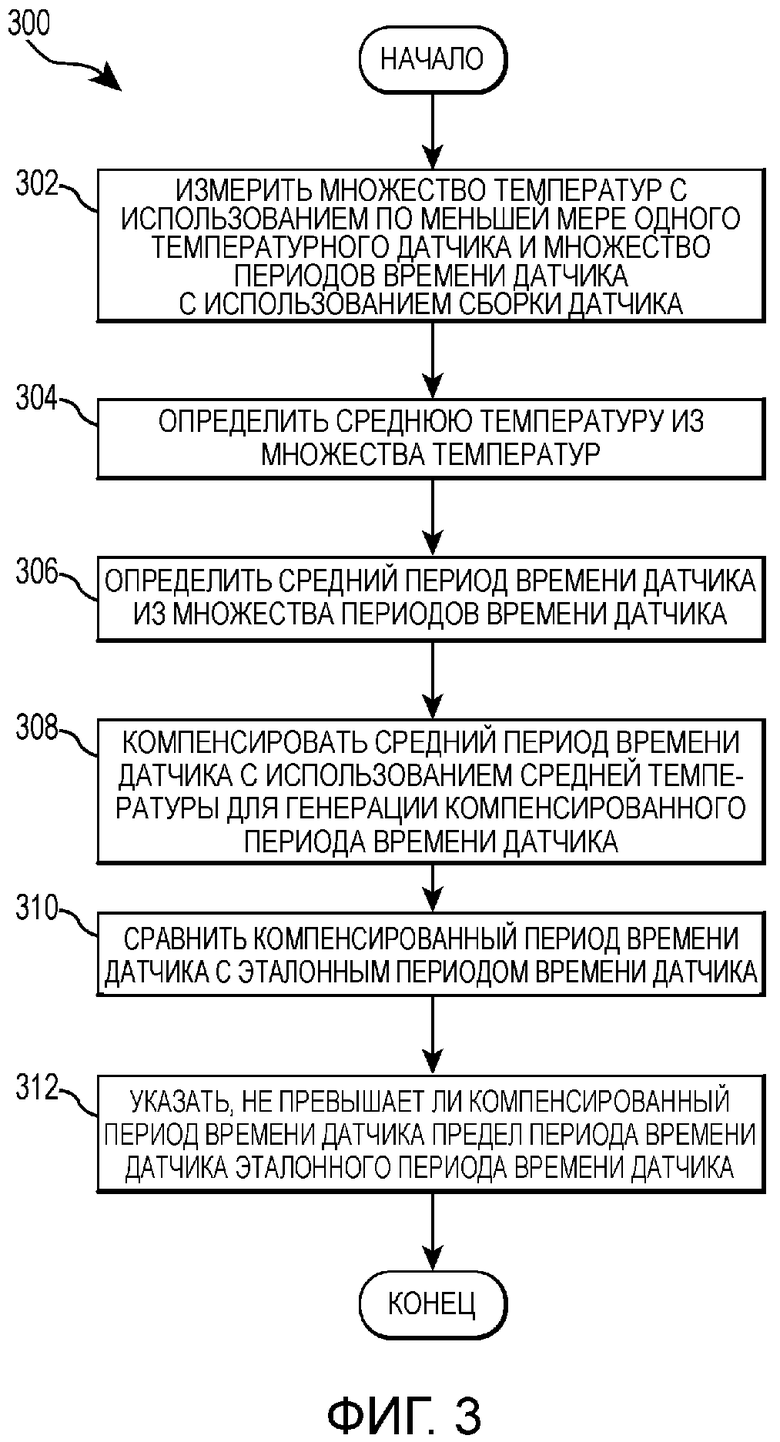
1. Измеритель (5) с вибрирующим элементом для проверки работоспособности измерителя, причем измеритель (5) с вибрирующим элементом содержит:
сборку (10) датчика, включающую в себя вибрирующий элемент (12), измерительный преобразователь (17) и драйвер (16), выполненный с возможностью возбуждать вибрации в вибрирующем элементе (12);
по меньшей мере один температурный датчик (112); и
измерительную электронику (20), соединенную с измерительным преобразователем (17), драйвером (16) и по меньшей мере одним температурным датчиком (112), причем измерительная электроника (20) выполнена с возможностью измерения множества температур с использованием по меньшей мере одного температурного датчика (112) и множества периодов времени датчика с использованием сборки (10) датчика, определения средней температуры из множества температур, определения среднего периода времени датчика из множества периодов времени датчика, компенсирования среднего периода времени датчика с использованием средней температуры для генерирования компенсированного периода времени датчика, сравнения компенсированного периода времени датчика с эталонным периодом времени датчика и указания, не превышает ли компенсированный период времени датчика предел ошибки периода времени датчика эталонного периода времени датчика.
2. Измеритель (5) по п. 1, в котором измерение множества температур (206) с использованием температурного датчика (112) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит очистку сборки (10) датчика.
3. Измеритель (5) по п. 1, в котором измерение множества температур (206) с использованием температурного датчика (112) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит заполнение сборки (10) датчика окружающим воздухом.
4. Измеритель (5) по п. 1, в котором измерение множества температур (206) с использованием температурного датчика (112) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит помещение сборки (10) датчика в вакуум.
5. Измеритель (5) по п. 1, в котором измерение множества температур (206) с использованием температурного датчика (112) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит заполнение сборки (10) датчика или помещение сборки датчика в текучую среду, имеющую точно известную плотность.
6. Измеритель (5) по п. 1, в котором измерительная электроника (20) дополнительно выполнена с возможностью вычисления среднеквадратичного отклонения с использованием одного из: множества температур (206) или множества периодов (207) времени датчика, сравнения среднеквадратичного отклонения с пределом и указания, является ли среднеквадратичное отклонение больше, чем предел.
7. Измеритель (5) по п. 1, в котором измерительная электроника (20) дополнительно выполнена с возможностью приема высоты (218) и компенсирования компенсированного периода (210) времени датчика с использованием высоты (218).
8. Измеритель (5) по п. 7, в котором измерительная электроника (20) дополнительно выполнена с возможностью измерения плотности текучей среды с использованием сборки (10) датчика и компенсирования компенсированного периода (210) времени датчика с учетом разности плотностей между эталонной плотностью (220) и измеренной плотностью (219) с использованием высоты (218) и средней температуры (208).
9. Способ проверки работоспособности датчика, причем способ содержит этапы, на которых:
измеряют множество температур (206) с использованием по меньшей мере одного температурного датчика (112) и множество периодов (207) времени датчика с использованием сборки (10) датчика, причем сборка (10) датчика включает в себя вибрирующий элемент (12), измерительный преобразователь (17) и драйвер (16), выполненный с возможностью возбуждать вибрации в вибрирующем элементе (12);
определяют среднюю температуру (208) из множества температур (206);
определяют средний период (209) времени датчика из множества периодов (207) времени датчика;
компенсируют средний период (209) времени датчика с использованием средней температуры (208) для генерации компенсированного периода (210) времени датчика;
сравнивают компенсированный период (210) времени датчика с эталонным периодом (211) времени датчика; и
указывают, не превышает ли компенсированный период (210) времени датчика предел (212) временнòй ошибки датчика эталонного периода (211) времени датчика.
10. Способ по п. 9, в котором измерение множества температур (206) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит очистку сборки (10) датчика.
11. Способ по п. 9, в котором измерение множества температур (206) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит заполнение сборки (10) датчика окружающим воздухом.
12. Способ по п. 9, в котором измерение множества температур (206) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит размещение сборки (10) датчика в вакууме.
13. Способ по п. 9, в котором измерение множества температур (206) и множества периодов (207) времени датчика с использованием сборки (10) датчика дополнительно содержит заполнение сборки (10) датчика или помещение сборки (10) датчика в текучую среду, имеющую точно известную плотность.
14. Способ по п. 9, дополнительно содержащий этапы, на которых:
вычисляют среднеквадратичное отклонение с использованием одного из: множества температур (206) или множества периодов (207) времени датчика;
сравнивают среднеквадратичное отклонение с пределом; и
указывают, является ли среднеквадратичное отклонение больше, чем предел.
15. Способ по п. 9, дополнительно содержащий этапы, на которых:
принимают высоту (218); и
компенсируют компенсированный период (210) времени датчика с использованием высоты (218).
16. Способ по п. 15, в котором компенсирование компенсированного периода (210) времени датчика с использованием высоты (218) дополнительно включает в себя этапы, на которых:
измеряют плотность текучей среды с использованием сборки (10) датчика; и
компенсируют компенсированный период (210) времени датчика с учетом разности плотностей между эталонной плотностью (220) и измеренной плотностью (219) с использованием высоты (218) и средней температуры (208).
17. Способ проверки работоспособности датчика, причем способ содержит этапы, на которых:
измеряют множество температур (206) с использованием по меньшей мере одного температурного датчика (112) и множество периодов (207) времени датчика с использованием сборки (10) датчика, при этом сборка (10) датчика включает в себя вибрирующий элемент (12), измерительный преобразователь (17) и драйвер (16), выполненный с возможностью возбуждать вибрации в вибрирующем элементе (12);
вычисляют первое среднеквадратичное отклонение с использованием первого набора данных, содержащего одно из: множества температур (206) или множества периодов (207) времени датчика;
сравнивают первое среднеквадратичное отклонение (213, 214) с первым пределом (215, 216); и
указывают, является ли первое среднеквадратичное отклонение (213, 214) больше, чем первый предел (215, 216).
18. Способ по п. 17, дополнительно содержащий этапы, на которых:
вычисляют второе среднеквадратичное отклонение (213, 214) с использованием второго набора данных, содержащего одно из: множества температур (206) или множества периодов (207) времени датчика, при этом первый набор данных отличается от второго набора данных;
сравнивают второе среднеквадратичное отклонение (213, 214) со вторым пределом (215, 216); и
указывают, является ли второе среднеквадратичное отклонение (213, 214) больше, чем второй предел (215, 216).
19. Способ проверки работоспособности датчика, при этом способ содержит этапы, на которых:
измеряют множество температур (206) с использованием по меньшей мере одного температурного датчика (112) и множество периодов (207) времени датчика с использованием сборки (10) датчика, при этом сборка (10) датчика включает в себя один или несколько вибрирующих элементов (12), один или несколько измерительных преобразователей (17) и драйвер (16), выполненный с возможностью возбуждать вибрации в одном или нескольких вибрирующих элементах (12);
определяют среднюю температуру (208) из множества температур (206);
определяют средний период (209) времени датчика из множества периодов (207) времени датчика;
принимают высоту (218);
измеряют плотность текучей среды с использованием сборки (10) датчика; и
компенсируют средний период (209) времени датчика с учетом разности плотностей между эталонной плотностью (220) и измеренной плотностью (219) с использованием высоты (218) и средней температуры (208).
| US 2001045134A1, 29.11.2001 | |||
| US 20070186684A1, 16.08.2007 | |||
| US 8151653B2, 10.04.2012 | |||
| US 20110203388A1, 25.08.2011 | |||
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ | 2003 |
|
RU2320964C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ МАТЕРИАЛА, ПРОТЕКАЮЩЕГО ЧЕРЕЗ РАСХОДОМЕР | 1997 |
|
RU2177610C2 |

