Настоящее изобретение касается индуктивного сенсора, имеющего сенсорную катушку, которая имеет два разъема катушки, и блок аналитической обработки сенсора, который соединен с двумя разъемами катушки, а также применения такого сенсора для мониторинга положения каната системы канатной дороги.
Бесконтактные индуктивные сенсоры часто применяются для измерения расстояния. При этом сенсор может быть выполнен в виде сенсора приближения, который срабатывает, начиная с определенного расстояния от сенсора до измеряемого объекта, или расстояние до объекта может также выдаваться сенсором в виде значения. Такие сенсоры часто служат для мониторинга определенных функциональных возможностей в машинах и установках.
Индуктивный сенсор использует катушку для создания электромагнитного поля, которое подвергается воздействию измеряемого объекта. Это воздействие может регистрироваться и аналитически обрабатываться по измерительной технологии. Одним из примеров осуществления является индуктивный сенсор, выполненный в виде сенсора вихревого тока. При этом осциллятор создает электромагнитное переменное поле, которое выходит из активной поверхности сенсора. В каждом электропроводящем объекте вблизи активной поверхности, в зависимости от расстояния от объекта до активной поверхности, индуцируются вихревые токи, которые отбирают энергию у осциллятора и могут регистрироваться на входе катушки как потери мощности.
Особым случаем применения индуктивного сенсора является мониторинг положения циркулирующего тягового каната системы канатной дороги. Этот тяговый канат для направления по данному маршруту на опорах канатной дороги проводится через шкивы системы шкивов. При этом положение тягового каната относительно шкивов этой системы шкивов может мониториться с помощью индуктивного сенсора. При этом может распознаваться как боковое отклонение тягового каната, что, например, может указывать на выскакивание тягового каната из шкива, так и слишком малое расстояние до оси вращения шкива, что указывает на врезание тягового каната в рабочую поверхность шкива, например, при блокирующемся шкиве. Мониторинг положения каната является важной функцией безопасности системы канатной дороги и может приводить к уменьшению скорости перемещения или к принудительному отключению канатной дороги. При мониторинге положения каната выполненный в виде стального каната тяговый канат служит измеряемым объектом, а сенсор стационарно расположен в области тягового каната. Этот случай применения нуждается в высокой чувствительности индуктивного сенсора, чтобы можно было регистрировать положение каната с достаточной точностью.
Недостаток таких индуктивных сенсоров заключается в том, что каждое внешнее (электро)магнитное переменное поле в окружении сенсора индуцирует электрическое напряжение в катушке сенсора. Это прикладываемое извне перенапряжение, конечно, нарушает также измерение. Помимо этого, сенсор, конечно, должен также иметь достаточную устойчивость к перенапряжению. Беспроводные или радиоволны в окружении сенсора будут индуцировать только низкие напряжения и в первую очередь будут отрицательно воздействовать на измерение и уменьшат чувствительность измерения. При попадании молнии в тяговый канат канатной дороги, напротив, происходит течение тока в тяговом канате, из-за чего вокруг тягового каната создаются сильные магнитные поля. Вследствие таких молниевых токов может происходить ввод в катушку сенсора очень высоких электрических напряжений. Исследования показали, что при характерных молниевых токах на отводах катушки могут возникать индуцированные напряжения в несколько киловольт. Эти высокие напряжения могут приводить к разрушению катушки и/или к разрушению последующей электроники сенсора.
Существует, конечно, возможность, имплементировать в сенсор электронную защиту от молнии или, соответственно, защиту от перенапряжения, что, однако, снова нарушает измерительный контур и вместе с тем ограничивает чувствительность сенсора.
Поэтому задачей изобретения является предложить индуктивный сенсор, который нечувствителен к внешним электромагнитным полям.
Эта задача решается таким образом, что сенсорная катушка выполнена с первой частью обмотки и соединенной с ней второй частью обмотки, при этом первая часть обмотки и вторая часть обмотки намотаны в противоположных направлениях, и первая часть обмотки соединена с первым разъемом катушки, а вторая часть обмотки соединена со вторым разъемом катушки. Вследствие противоположно направленной намотки индуцируемые в частях обмотки напряжения по меньшей мере частично компенсируют друг друга, так что на разъемах катушки могут возникать только от небольших напряжений до полного их отсутствия. При этом измерение не нарушается или нарушается только несущественно, так что может достигаться высокая чувствительность измерения. Также не нужны никакие другие меры для защиты от перенапряжений, вызываемых внешними электромагнитными полями, которые могли бы нарушить измерительный контур. При этом сенсор может также защищаться от очень высоких внешних электромагнитных полей, которые, например, могут возникать при молниевых токах по проводникам. При этом такой сенсор пригоден, в частности, также для случаев применения вне помещений. Поэтому одним из особенно предпочтительных случаев применения такого сенсора является применение в системе канатной дороги, например, для мониторинга положения тягового каната.
В одном из простых вариантов осуществления сенсорная катушка выполнена, будучи намотана непрерывно в виде восьмерки. Такая сенсорная катушка особенно проста в изготовлении.
Особенно предпочтительна сенсорная катушка, имеющая первую отдельную катушку в качестве первой части обмотки, которая последовательно соединена со второй отдельной катушкой в качестве второй части обмотки. С помощью этого варианта осуществления можно избегать высоких разностных напряжений между отдельными обмотками сенсорной катушки, благодаря чему снижена опасность электрических пробоев.
Когда первая отдельная катушка и вторая отдельная катушка намотаны спирально, может реализовываться особенно плоская сенсорная катушка, что предпочтительно для применения в сенсоре.
Настоящее изобретение поясняется подробнее ниже со ссылкой на фиг.1-5, на которых в качестве примера, схематично и не ограничивающим образом показаны предпочтительные варианты осуществления изобретения. При этом показано:
фиг.1: принцип действия бесконтактного индуктивного сенсора;
фиг.2: первый вариант осуществления предлагаемой изобретением сенсорной катушки;
фиг.3: другой вариант осуществления предлагаемой изобретением сенсорной катушки;
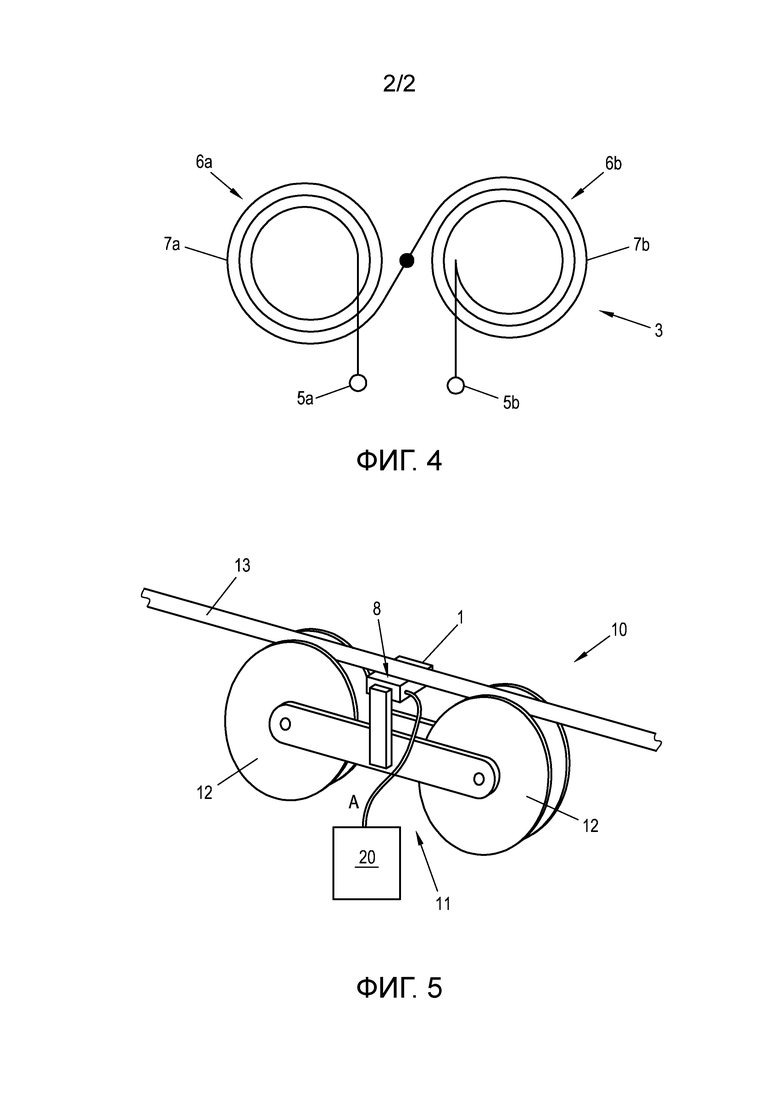
фиг.4: другой вариант осуществления предлагаемой изобретением сенсорной катушки и
фиг.5: применение предлагаемой изобретением сенсорной катушки для мониторинга положения каната в системе канатной дороги.
Принцип индуктивного сенсора для измерения расстояния изображен на фиг.1. Сенсорная катушка 3 создает электромагнитное поле, которое взаимодействует с электропроводящим объектом 4. Это взаимодействие может регистрироваться на отводах 5 сенсорной катушки 3 и аналитически обрабатываться блоком 2 аналитической обработки сенсора, например, по напряжению u катушки и/или току i катушки. В одном из вариантов осуществления в виде сенсора вихревого тока осциллятор создает в блоке 2 аналитической обработки сенсора высокочастотное переменное напряжение, которое подается на сенсорную катушку 3 и создает высокочастотное переменное поле. Это высокочастотное переменное поле создает в объекте 4 в области воздействия на сенсор 1 вихревые токи, которые отбирают энергию у электромагнитного переменного поля, вследствие чего уменьшается высота амплитуды колебаний напряжения осциллятора. Это изменение амплитуды колебаний аналитически обрабатывается блоком 2 аналитической обработки сенсора. Сенсор 1 дает в качестве выходного сигнала A или высокий уровень, или низкий уровень при варианте осуществления в виде выключателя приближения, либо выходной сигнал A представляет меру расстояния между сенсорной катушкой 3 и объектом 4. В последнем случае выходной сигнал A может быть аналоговым, например, электрическим напряжением, или цифровым.
Для изобретения, однако, не важно, по какому принципу работает индуктивный сенсор 1 или как выполнен блок 2 аналитической обработки сенсора, или как осуществляется аналитическая обработка, или какого вида выходной сигнал A выдается.
Изобретение основывается на особом варианте осуществления сенсорной катушки 3. Сенсорная катушка 3 в соответствии с изобретением выполнена с первой частью 6a обмотки и соединенной с ней второй частью 6b обмотки, при этом первая часть 6a обмотки и вторая часть 6b обмотки намотаны в противоположных направлениях. Первый разъем 5a катушки соединен с первой частью 6a обмотки, а второй разъем 5b катушки соединен со второй частью 6b обмотки. Вследствие противоположно направленной намотки двух частей 6a, 6b обмотки внешние электромагнитные поля индуцируют в двух частях 6a, 6b обмотки противоположные напряжения, которые по меньшей мере отчасти компенсируют друг друга. Таким образом вследствие действующих извне электромагнитных полей на разъемах 5a, 5b катушки возникает существенно более низкое перенапряжение. Когда две части 6a, 6b обмотки, за исключением направления намотки, идентичны, то индуцируемые в них напряжения даже по существу устраняют друг друга, и на разъемах 5a, 5b катушки не появляются никакие, или только чрезвычайно низкие, перенапряжения. Это относится по меньшей мере к гомогенному внешнему электромагнитному полю, что, однако, как правило, может предполагаться для характерных случаев применения. Но даже при негомогенном внешнем поле эти два индуцируемых напряжения большей частью компенсировали бы друг друга.
Итак, сенсорная катушка 3 может быть намотана непрерывно или может также состоять из двух соединенных по последовательной схеме отдельных катушек.
В первом варианте осуществления в соответствии с фиг.2 сенсорная катушка 3 намотана непрерывно в виде восьмерки. Простоты ради, на фиг.2 у каждой части 6a, 6b обмотки изображены только по два витка, при этом сенсорная катушка 3 может, конечно, иметь и больше витков. Вследствие намотки в виде восьмерки эти две возникающие части 6a 6b обмотки имеют противоположно направленную намотку.
Похожий результат получают, когда сначала наматывают одну катушку, намотанную катушку в одном месте сжимают, и затем поворачивают одну из возникающих при этом частей 6a обмотки относительно другой части 6b обмотки на 180°. Таким образом тоже возникает непрерывно намотанная в виде восьмерки сенсорная катушка 3, имеющая две намотанные в противоположных направлениях части 6a, 6b обмотки.
Другой вариант осуществления получается, когда две намотанные в противоположных направлениях отдельные катушки 7a, 7b соединяются по последовательной схеме. При этом две отдельные катушки 7a, 7b образуют в сенсорной катушке 3 по одной части 6a, 6b обмотки, как изображено на фиг.3.
В одном из особенно предпочтительных вариантов осуществления образующие эти две части 6a, 6b обмотки отдельные катушки 7a, 7b наматываются спирально, как изображено на фиг.4. При этом витки частей 6a, 6b обмотки расположены предпочтительно в одной плоскости. При этом части 6a, 6b обмотки могут быть намотаны в виде однослойной геликоиды, или же в виде многослойной геликоиды. При таком варианте осуществления сенсорная катушка 3 может выполняться особенно плоской.
Преимущество варианта осуществления, имеющего соединенные по последовательной схеме отдельные катушки 7a, 7b, по сравнению с непрерывно намотанной сенсорной катушкой 3, заключается в том, что различия напряжений между находящимися рядом друг с другом витками сенсорной катушки 3 всегда малы, так что не могут возникать нежелательные электрические пробои, которые разрушали бы сенсорную катушку 3. При варианте осуществления в виде восьмерки, в частности в области точки пересечения отдельных витков, могут возникать слишком большие различия напряжения между отдельными витками, из-за чего здесь опасность электрических пробоев выше, и поэтому при известных обстоятельствах должны приниматься более высокие изоляционные меры.
Во избежание неполного или частичного взаимного гашения электромагнитных полей возбуждения, создаваемых частями 6a, 6b обмотки, две части 6a, 6b обмотки, как изображено на фигурах, расположены в одной плоскости рядом друг с другом, а не друг за другом. Эта плоскость называется также активной поверхностью 8 (фиг.1) сенсора 1, из которой выходят электромагнитные поля. При этом объект 4 расположен относительно активной поверхности 8 сенсора 1, чтобы попадать в область воздействия электромагнитных полей.
Сенсор 1 может также применяться в случаях, критических для безопасности, так что сенсор 1 может быть выполнен, чтобы выполнять требования к функциональной безопасности (например, уровень требований к безопасности по IEC 61068). Например, сенсор 1 мог бы быть выполнен с двухканальным блоком 2 аналитической обработки, при этом также могут быть предусмотрены взаимные проверки каналов. Разумеется, возможны и другие или дополнительные известные меры для достижения функциональной безопасности.
Один из предпочтительных случаев применения предлагаемого изобретением индуктивного сенсора 1 в мониторинге положения каната системы 10 канатной дороги, которая изображена на фиг.5. Система 10 канатной дороги изображена на фиг.5 только частично и в необходимом объеме, так как основополагающая конструкция системы канатной дороги в разных вариантах осуществления достаточно известна. При этом сенсор 1 располагается, например, в области системы 11 шкивов на опоре канатной дороги, имеющей некоторое количество канатных шкивов 12, стационарно и при бесконтактном активной связи с тяговым канатом 13. Разумеется, сенсор 1 может быть также расположен для мониторинга положения тягового каната 13 в любом другом месте системы 10 канатной дороги. При этом «в активной связи» означает, конечно, что тяговый канат 13 в качестве объекта 4 достаточно воздействует на электромагнитное поле сенсорной катушки 3 сенсора 1, так что изменение положения тягового каната 13 относительно сенсора 1 может регистрироваться и аналитически обрабатываться блоком 2 аналитической обработки сенсора. Для этого тяговый канат 13 расположен напротив активной поверхности 8 сенсора 1. Выходной сигнал A от сенсора 1 передается в блок 20(2?) аналитической обработки сенсора и используется там для управления системой 10 канатной дороги. Передача может, конечно, осуществляться проводным или беспроводным путем. Например, в зависимости от выходного сигнала A, может изменяться скорость перемещения тягового каната 13 или останавливаться система 10 канатной дороги.

Группа изобретений относится к индуктивным сенсорам. Индуктивный сенсор для мониторинга положения тягового каната системы канатной дороги содержит сенсорную катушку, выполненную с первой частью обмотки и соединенной с ней второй частью обмотки, при этом первая часть обмотки и вторая часть обмотки намотаны в противоположных направлениях, и первая часть обмотки соединена с первым разъемом катушки, а вторая часть обмотки соединена со вторым разъемом катушки. Технический результат – повышение помехозащищенности к внешним электромагнитным полям. 2 н. и 4 з.п. ф-лы, 5 ил.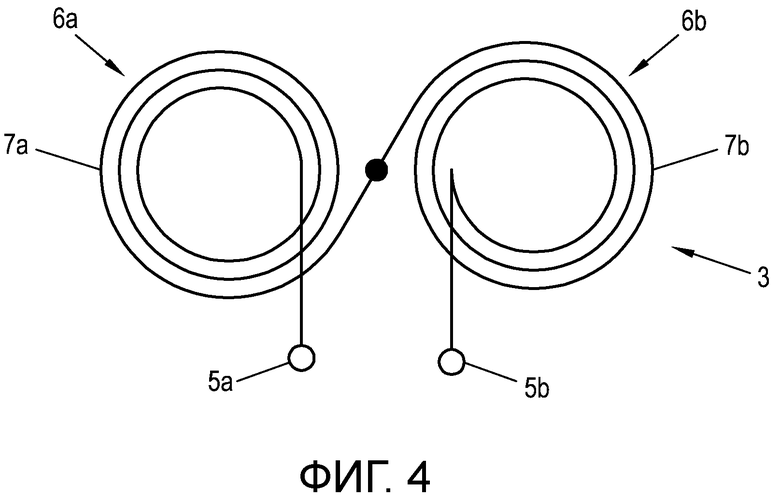
1. Индуктивный сенсор (1) для мониторинга положения тягового каната (13) системы (10) канатной дороги, причем этот сенсор (1) включает в себя сенсорную катушку (3) с двумя разъемами (5a, 5b) катушки и блок (2) аналитической обработки сенсора, который соединен с двумя разъемами (5a, 5b) катушки, отличающийся тем, что катушка (3) выполнена с первой частью (6a) обмотки и соединенной с ней второй частью (6b) обмотки, при этом первая часть (6a) обмотки и вторая часть (6b) обмотки намотаны в противоположных направлениях, и первая часть (6a) обмотки соединена с первым разъемом (5a) катушки, а вторая часть (6b) обмотки соединена со вторым разъемом (5b) катушки, и что сенсорная катушка (3) выполнена для вступления в активную связь с тяговым канатом (13), а блок (2) аналитической обработки сенсора выполнен для регистрации и аналитической обработки изменения положения тягового каната (13) относительно сенсора (1).
2. Индуктивный сенсор по п. 1, отличающийся тем, что сенсорная катушка (3) выполнена будучи намотана непрерывно в виде восьмерки.
3. Индуктивный сенсор по п. 1, отличающийся тем, что первая отдельная катушка (7a) в качестве первой части (6a) обмотки последовательно соединена со второй отдельной катушкой (7b) в качестве второй части (6b) обмотки.
4. Индуктивный сенсор по п. 3, отличающийся тем, что первая отдельная катушка (7a) и вторая отдельная катушка (7b) намотаны спирально.
5. Индуктивный сенсор по одному из пп. 1-4, отличающийся тем, что две части (6a, 6b) обмотки расположены в одной плоскости рядом друг с другом.
6. Система канатной дороги, включающая в себя тяговый канат (13) и индуктивный сенсор (1) по одному из пп. 1-5 для мониторинга положения тягового каната (13).
| ФУТЕРОВКА ДЛЯ ЭЛЕКТРОЛИЗЕРОВ | 0 |
|
SU204596A1 |
| DE 69717188 T2, 09.10.2003 | |||
| US 5864229 A, 26.01.1999 | |||
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |

