Область техники, к которой относится изобретение
Изобретение относится к медицинской системе и к медицинскому способу применения медицинской процедуры к живому существу.
Уровень техники изобретения
Документ US 4 901 967 раскрывает стенд медицинского обслуживания для связи с транспортным кронштейном для оборудования, содержащим стойку с кронштейнами. Стенд медицинского обслуживания содержит поворотный опорный рычаг, имеющую сборочный узел запорного блока, предназначенный для помещения в него блокирующего элемента транспортного кронштейна, причем сборочный узел блока содержит трубку для помещения в нее стойки, выполненную с возможностью помещения в нее стойки с кронштейнами для шарнирного размещения кронштейна, и сборочный узел блока содержит запорную пластину и сборочный узел запорного штыря. Стенд медицинского обслуживания дополнительно содержит сборочный узел поршня и цилиндра, связанный с опорным рычагом для выборочного силового позиционирования опорного рычага, причем опорный рычаг крепится к валу, связанному со сборочным узлом поршня и цилиндра. Кроме того, стенд медицинского обслуживания содержит выборочно действующее клапанное средство для управления сборочным узлом поршня и цилиндра и корпус с размерами, позволяющими установить в него сборочный узел поршня и цилиндра и содержащий выпускное сервисное средство для подключения источников электропитания и газа.
Документ US 2010/0305502 A1 раскрывает механизм управления движением устройства для перемещения по меньшей мере одного удлиненного медицинского устройства. Механизм содержит основание привода, имеющее множество прорезей, причем каждая прорезь имеет открытые верхнюю и противоположные стороны, первое множество пар противоположных колес на противоположных сторонах соответствующей прорези, и механизм привода, выполненный с возможностью соединения со множеством двигателей, причем каждый двигатель выполнен с возможностью вращения по меньшей мере одного колеса изх соответствующей пары противоположных колес. Механизм дополнительно содержит вращающуюся втулку, в которую может проходить устройство для сцепления со втулкой, причем втулка вместе с устройством могут вращаться вокруг оси за счет сцепления со вторым множеством противоположных колес. Механизм, прежде всего, содержит для каждой первой пары колес плиту, подвижно установленную на основании привода для перемещения между нагруженным положением, в котором вершина прорези открыта, чтобы позволить участку по меньшей мере одного вытянутого устройства входить в открытую прорезь между соответствующими парами колес, и положением привода, в котором плита, по меньшей мере, частично, блокирует верхнюю часть прорези, чтобы удерживать в ней по меньшей мере одно удлиненное устройство.
Документ US 2010/0074681 A1 раскрывает фиксирующий сборочный узел для автоматической блокировки транспортного кронштейна со стендом обслуживания, причем фиксирующий сборочный узел содержит фиксирующий сборочный узел стенда обслуживания и фиксирующий сборочный узел транспортного кронштейна. Фиксирующий сборочный узел стенда обслуживания содержит вставной содинитель, зависящий от стенда обслуживания, соединительную вставку, зависящую от вставного соединителя, причем соединительная вставка определяет апертуру, проходящую от соединительной вставки внутрь к внешней части соединительной вставки, и элемент крепления, подвижно закрепленный внутри апертуры. Фиксирующий сборочный узел транспортного кронштейна содержит трубчатую гильзу с внутренней канавкой и фиксатором, расположенными внутри гильзы так, что при вставлении фиксатора внутрь соединительной вставки фиксатор принудительно заставляет элемент крепления входить во внутреннюю канавку, чтобы удерживать крепление фиксирующего сборочного узла транспортного кронштейна с фиксирующим сборочным узлом стенда обслуживания.
Документы DE 89 05 588 U1 и DE 10 2005 053 030 A1 раскрывают рентгеновские системы с C-образным кронштейном, прикрепленные к полу или к потолку комнаты. Документ EP 2 218 396 A1 раскрывает автоматизированный манипулятор для дистанционного манипулирования катетером, в котором автоматизированный манипулятор крепится к столу для пациента, и документ WO 2004/082553 A2 раскрывает систему с радиальным рычагом для оборудования ухода за пациентом, такого как оборудование для вливания, мониторы и так далее.
Документ US 8 257 303 B2 раскрывает автоматизированную катетерную систему, содержащую станцию управления оператора, расположенную на удалении от операционного стола, к которому посредством монтажного кронштейна для привода инструмента крепятся привод инструмента и инструмент. Линия связи передает сигналы между станцией управления оператора и приводом инструмента.
Поскольку операционный стол содержит в себе привод инструмента и инструмент, нагрузочная способность операционного стола для пациента уменьшается.
Сущность изобретения
Задача настоящего изобретения заключается в обеспечении медицинской системы для применения медицинской процедуры к живому существу, в которой нагрузочная способность средства поддержки, на котором располагается живое существо, может быть увеличена.
В первом варианте настоящего изобретения представляется медицинская система для применения медицинской процедуры к живому существу, медицинская система содержит:
- медицинское устройство для выполнения медицинской процедуры, в котором медицинское устройство выполнено с возможностью перемещения относительно базисного устройства для применения медицинской процедуры, причем медицинское устройство содержит медицинское роботизированное устройство и/или устройство управления катетером,
- систему крепления для крепления медицинского устройства к стене и/или к потолку помещения, в которой система крепления является системой подвешивания для подвешивания медицинского устройства на стене и/или на потолке помещения,
- элемент фиксации для жесткого крепления медицинского устройства к базисному устройству, и
- пассивный элемент сопряжения между системой крепления и медицинским устройством, причем пассивный элемент сопряжения выполнен с возможностью обеспечения сопряжения при перемещении медицинского устройства относительно системы крепления.
Поскольку медицинское устройство для выполнения медицинской процедуры крепится к стене и/или к потолку помещения, от средства поддержки живого существа не требуется полностью нести на себе вес медицинского устройства. Кроме того, поскольку медицинское устройство, используя элемент фиксации, может быть жестко прикреплено к базисному устройству, то есть, поскольку может быть обеспечено жесткое соединение между медицинским устройством и базисным устройством, высокая точность перемещения, по меньшей мере, части медицинского устройства относительно базисного устройства и высокая стабильность расположения, тем самым, могут быть гарантированы, позволяя, таким образом, точное применение медицинской процедуры. Поэтому может быть обеспечена повышенная нагрузочная способность средства поддержки и в то же время медицинская процедура может выполняться очень точно. В частности, если при использовании медицинского устройства базисным устройством и средством поддержки является стол для пациента, на который ложится пациент, медицинская процедура может точно применяться к пациенту, хотя медицинское устройство не несет на себе полностью вес стола для пациента, а этот вес несет, главным образом, стена и/или потолок помещения, позволяя, таким образом, иметь повышенную нагрузочную способность стола для пациента.
Живым существом является человек или животное. Медицинское устройство содержит медицинское роботизированное устройство, такое как хирургический робот, который может также рассматриваться как операционный робот, и/или устройство управления катетером. Система крепления, элемент фиксации и элемент сопряжения предпочтительно выполняются таким образом, что базисное устройство несет груз в несколько килограммов, но не более 10 кг, тогда как остальной вес берет на себя и несет стена и/или потолок через элемент сопряжения и систему крепления. Общий вес, который должно нести базисное устройство и стена и/или потолок через элемент сопряжения и систему крепления, может быть порядка 100 кг. Медицинская система дополнительно содержит элемент сопряжения между системой крепления и медицинским устройством, который предпочтительно является пружинным элементом. Пружинный элемент может быть механической или пневматической пружиной. Элемент сопряжения, который может также рассматриваться как компенсатор силы тяжести, перед применением медицинской процедуры, например, во время жесткого прикрепления медицинского устройства к базисному устройству, и/или во время медицинской процедуры, позволяет небольшие перемещения медицинского устройства относительно системы крепления, не требуя изменения конфигурации системы крепления,базисному устройству. В частности, элемент сопряжения предпочтительно выполняется с возможностью обеспечения возможности перемещений медицинского устройства относительно системы крепления по меньшей мере на 10 см и, дополнительно, предпочтительно на 30 см или больше. Элемент сопряжения предпочтительно является элементом сопряжения, в частности, пассивным элементом сопряжения, который обеспечивает сопряжение, если пользователь перемещает медицинское устройство относительно системы крепления, например, посредством непосредственного перемещения медицинского устройства, особенно при позиционировании медицинского устройства относительно базисного устройства, или перемещая базисное устройство, если медицинское устройство уже было жестко прикреплено к базисному устройству.
Система крепления является системой подвешивания для подвешивания медицинского устройства на стене и/или на потолке помещения. Система крепления предпочтительно выполнена с возможностью крепления с возможностью перемещения медицинского устройства, так чтобы медицинское устройство могло двигаться в различные места и/или в различные положения. Это позволяет медицинскому устройству перемещаться в желаемое местопооложение и/или в желаемое положение, причем в этом месте и, как вариант, также в этом положении медицинское устройство может жестко крепиться к базисному устройству, используя элемент фиксации.
Предпочтительно, для первого сеанса работы медицинское устройство жестко крепится к базисному устройству элементом фиксации для обеспечения жесткого соединения между медицинским устройством и базисным устройством, причем после того, как медицинское устройство было отсоединено от базисного устройства, для второго сеанса работы медицинское устройство может снова жестко крепиться к базисному устройству элементом фиксации, чтобы обеспечить жесткое соединение между медицинским устройством и базисным устройством, причем элемент фиксации выполнен таким образом, что пространственное соотношение между медицинским устройством и базисным устройством является одним и тем же в первом и втором сеансах работы. Например, элемент фиксации может содержать жесткие элементы, так что одна и та же конфигурация элемента фиксации может использоваться в первой и второй процедурах, чтобы не изменять пространственное соотношение между медицинским устройством и базисным устройством в первом и втором сеансах работы. Таким образом, пространственное соотношение между медицинским устройством и базисным устройством может воспроизводиться, так что второй сеанс работы может начинаться сразу после того, как медицинское устройство было прикреплено к базисному устройству, не требуя, например, в начале второго сеанса работы определения пространственного соотношения между медицинским устройством и базисным устройством.
Элемент фиксации предпочтительно выполнен таким образом, что медицинское роботизированное устройство и/или устройство управления катетером могут быть расположены относительно базисного устройства с точностью, равной или лучшей, чем 1 мм и/или 0,1 градуса по положению, в котором медицинское роботизированное устройство и/или устройство управления катетером прикрепляется к базисному устройству. Дополнительно предпочтительно, чтобы медицинское устройство и элемент фиксации были выполнены таким образом, чтобы дистальный наконечник медицинского автоматизированного устройства и/или катетера, управляемого устройством управления катетером, мог быть расположен относительно базисного устройства с точностью, равной или лучшей, чем 1 мм и/или 0,1 градуса.
Элемент фиксации может быть выполнен с возможностью фиксации медицинского устройства в два этапа, причем на первом этапе медицинское устройство может быть размещено относительно базисного устройства, а на втором этапе медицинское устройство может быть зафиксировано в положении, в которое медицинское устройство было помещено относительно базисного устройства. Например, элемент фиксации может содержать a) два установочных штифта, фиксированно прикрепленных к базисному устройству или к медицинскому устройству и b) два отверстия, зафиксированных на медицинском устройстве или базисном устройстве, причем одно из отверстий может быть отверстием с пазом. Эти два установочных штифта могут проходить через эти два отверстия, чтобы точно располагать медицинское устройство относительно базисного устройства на первом этапе. На втором этапе медицинское устройство может быть зафиксировано относительно базисного устройства, используя известные средства фиксации, такие как подпружиненные быстродействующие байонетные запоры, быстродействующие запоры, зажимы, поворотные замки, пневматические средства и так далее. В дополнительном примере элемент фиксации может содержать a) два шарика от подшипника, фиксированных в базисном устройстве или медицинском устройстве и b) два паза, причем первый паз может быть сужающимся пазом, который удерживает шарик от подшипника в месте расположения первого паза и который может иметь круглое горизонтальное поперечное сечение, и причем второй паз может быть удлиненным пазом в виде канавки, ограничивающей перемещение в одном направлении. На первом этапе медицинское устройство может быть расположено относительно базисного устройства, располагая шарики от подшипника в этих двух пазах. На втором этапе это расположение может быть зафиксировано, используя известные средства фиксации, такие как подпружиненные байонетные быстродействующие запоры, зажимы, поворотные замки, пневматические средства и так далее.
Медицинская система предпочтительно дополнительно содержит устройство отображения для формирования изображения живого существа во время медицинской процедуры. Устройство отображения предпочтительно является рентгеновской системой с C-образным кронштейном для формирования рентгеновских проекционных изображений живого существа и, как вариант, также части медицинского устройства, такой как игла или катетер внутри живого существа.
В другом варианте представляется медицинский способ применения медицинской процедуры к живому существу при использовании медицинской системы, определенной в п. 1 формулы изобретения, в котором медицинский способ содержит этапы, на которых:
прикрепляют медицинское устройство к стене и/или потолку помещения, используя систему крепления, в которой система крепления является системой подвешивания для подвешивания медицинского устройства на стене и/или на потолке помещения, причем медицинское устройство выполнено с возможностью выполнения перемещения относительно базисного устройства, чтобы применить медицинскую процедуру, причем медицинское устройство содержит медицинское роботизированное устройство и/или устройство управления катетором,
- жестко прикрепляют медицинское устройство к базисному устройству, используя элемент фиксации, таким образом перемещая медицинское устройство относительно места крепления, используя элемент сопряжения, и
- выполняют медицинскую процедуру, используя медицинское устройство.
Следует понимать, что предпочтительный вариант осуществления изобретения может также быть любой комбинацией зависимых пунктов формулы изобретения или описанных выше вариантов осуществления с соответствующими независимыми пунктами формулы изобретения.
Эти и другие варианты изобретения станут очевидны и будут подробно объяснены со ссылкой на варианты осуществления, описанные далее.
Краткое описание чертежей
На последующих чертежах:
Фиг. 1 - схематичный и примерный вариант осуществления медицинской системы для применения медицинской процедуры к живому существу, и
Фиг. 2 - блок-схема последовательности выполнения операций примерного варианта осуществления медицинского способа для применения медицинской процедуры к живому существу.
Подробное описание вариантов осуществления
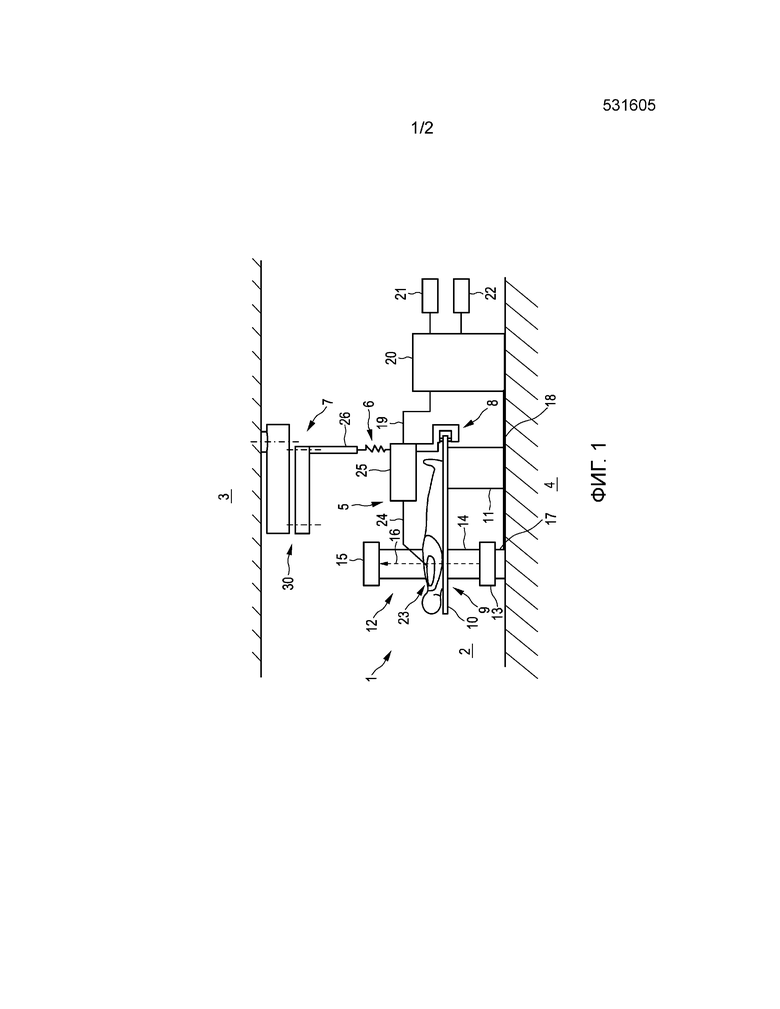
На фиг. 1 схематично и примерно показан вариант осуществления медицинской системы для применения медицинской процедуры к живому существу. В этом варианте осуществления медицинская система 1 выполнена с возможностью применения хирургической операции к человеку 23, лежащему на столе 9 для пациента, содержащем плиту 10 стола и ножку 11 стола. Предпочтительно, высота ножки 11 стола может меняться и плита 10 стола может перемещаться относительно ножки 11 стола, чтобы с удобством расположить пациента 23.
Хирургическая операция выполняется хирургическим роботом 5, содержащим хирургический инструмент 24, такой как игла или катетер, введенный в тело пациента 23, и блок 25 привода хирургического инструмента для привода хирургического инструмента 24. Стол для пациента может рассматриваться как базисное устройство или отсчетное устройство, т.е. устройство относительно которого во время медицинской процедуры перемещается хирургический инструмент 24 и, таким образом, хирургический робот 5, то есть, в этом варианте осуществления часть хирургического робота 5. Хирургический робот 5 управляется устройством 20 управления, которое располагается на удалении от хирургического робота 5 и которое соединяется с хирургическим роботом 5 через электрическое соединение 19. Устройство 20 управления выполнено с возможностью управления хирургическим роботом 5 в соответствии с данными управления, вводимыми в управляющее устройство 20 через устройство 21 ввода. Устройство 21 ввода содержит, например, клавиатуру, джойстик, сенсорный экран, компьютерную мышь и так далее, которые, по мере необходимости, позволяют оператору управлять хирургическим роботом 5 через устройство 20 управления. В этом варианте осуществления электрическое соединение 19 является проводным электрическим соединением. Однако, в другом варианте осуществления электрическое соединение может также быть беспроводным соединением или механическим соединением.
Медицинская система 1 дополнительно содержит систему 7 крепления для крепления хирургического робота 5 к потолку 3 помещения 2. Система 7 крепления является системой подвешивания для подвешивания хирургического робота 5 на потолке 3, в которой система подвешивания прикрепляет хирургический робот 5 к потолку 3 с возможностью движения, так чтобы хирургический робот 5 мог перемещаться в различные места и/или в различные положения. Например, система 7 подвешивания может содержать несколько удлиненных сегментов 30, причем смежные концы удлиненных сегментов 30 соединяются друг с другом через петли, так чтобы удлиненные сегменты 30 могли вращаться относительно друг друга. Один конец одного из удлиненных сегментов 30 может также соединяться с потолком 3 с возможностью вращения. Кроме того, по меньшей мере удлиненный сегмент может быть выполнен таким образом, что его длина является изменяемой. Например, по меньшей мере один сегмент может быть изготовлен из нескольких трубок с разными диаметрами, вставляемых друг в друга, чтобы позволить оператору изменять длину соответствующего сегмента.
В этом варианте осуществления система 7 крепления дополнительно содержит вертикально ориентированный стержень 26, соединяющий конец сегмента 30 с элементом 6 сопряжения, в настоящем варианте осуществления являющимся пружинным элементом. Пружинный элемент 6 может быть, например, механической пружиной или пневматической пружиной.
Медицинская система 1 дополнительно содержит элемент 8 фиксации для жесткого крепления хирургического робота 5 к столу 9 для пациента, чтобы обеспечить жесткое соединение между хирургическим роботом 5 и столом 9 для пациента. Элемент 8 фиксации может быть металлическим элементом, который может крепиться к столу 9 для пациента с помощью винтов или других элементов, обеспечивающих жесткое крепление к столу 9 для пациента. В варианте осуществления при первом сеансе работы хирургический робот 5 жестко крепится к столу 9 для пациента элементом 8 фиксации для обеспечения жесткого соединения между хирургическим роботом 5 и столом 9 для пациента, причем после того, как хирургический робот 5 отсоединен от стола 9 для пациента, при втором сеансе работы хирургический робот 5 снова жестко прикрепляется к столу 9 для пациента элементом 8 фиксации для обеспечения жесткого соединения между хирургическим роботом 5 и столом 9 для пациента, причем элемент 8 фиксации выполнен таким образом, что пространственное соотношение между хирургическим роботом 5 и столом 9 для пациента является одинаковым в первом и втором сеансах работы. Например, элемент 8 фиксации может содержать жесткие элементы, так что одна и та же конфигурация элемента 8 фиксации может использоваться в первом и втором сеансах работ, чтобы не изменять пространственное соотношение между хирургическим роботом 5 и столом 9 для пациента в первом и втором сеансах работ. Таким образом, пространственное соотношение между хирургическим роботом 5 и столом 9 для пациента может повторно воспроизводиться, так что второй сеанс работы может начинаться сразу после того, как хирургический робот 5 прикреплен к столу 9 для пациента, без определения, например, пространственного соотношения между хирургическим роботом 5 и столом 9 для пациента в начале второго сеанса работы.
Медицинская система 1 дополнительно содержит устройство 12 отображения для формирования изображения хирургического инструмента 24 внутри пациента 23. Изображение может подаваться на устройство 20 управления через соединение 18 для передачи данных, которое предпочтительно является проводным соединением для передачи данных, причем сформированное изображение может быть показано на дисплее 22. Оператор может на дисплее 22 видеть хирургический инструмент 24 внутри пациента 23 относительно внутренней анатомии пациента 23 и оператор может затем управлять хирургическим роботом 5 через устройство 20 управления с помощью устройства 21 ввода, основываясь на положении и ориентации хирургического инструмента 24 внутри анатомии пациента 23, как показано посредством изображения на дисплее 22. В этом варианте осуществления устройство 12 отображения является рентгеновским устройством с C-образным кронштейном, содержащим источник 13 рентгеновского излучения, излучающий рентгеновские лучи 16, проходящие через пациента 23, и рентгеновский детектор 15, обнаруживающий рентгеновские лучи 16 после их прохождения через пациента 23. Источник 13 рентгеновского излучения и рентгеновский детектор 15 монтируются на C-образном кронштейне 14. C-образный кронштейн 14 может двигаться относительно несущей конструкции 17, на которой установлен C-образный кронштейн 14. Несущая конструкция 17 устанавливается на полу 4 помещения 2 и может фиксированно или подвижно крепиться к полу 4. В другом варианте осуществления C-образный кронштейн может быть прикреплен к потолку через соответствующий несущий элемент, прикрепленный к потолку. Устройство 12 отображения формирует рентгеновские проекционные изображения пациента 23, которые подаются на устройство 20 управления и показываются на дисплее 22.
Все компоненты медицинской системы 1 и пациент 23 могут регистрироваться относительно стола 9 для пациента. Например, устройство 12 отображения может быть зарегистрировано относительно стола 9 для пациента, основываясь на признаках стола 9 для пациента, располагающихся в известных местах внутри базисной или отсчетной системы координат, определенной столом 9 для пациента и видимых на проекционных изображениях, формируемых устройством 12 отображения. Признаки стола 9 для пациента могут быть металлическими маркерами или другими маркерами, видимыми на рентгеновских проекционных изображениях. В других вариантах осуществления устройство 12 отображения и стол 9 для пациента могут также быть зарегистрированы относительно друг друга другим способом. Например, вместо использования признаков стола для пациента, во время процедуры регистрации в известном месте внутри базисной или отсчетной системы координат, определяемой столом 9 для пациента, к столу 9 для пациента может быть прикреплен фантомная метка, причем фантомная метка может содержать признаки, видимые в проекционных изображениях, сформированных устройством 12 отображения. Регистрация может затем выполняться, основываясь на известном местоположении фантомной метки относительно стола 9 для пациента, то есть, в базисной системе координат, и основываясь на положениях признаков фантомной метки на проекционных изображениях. Хирургический робот 5 может регистрироваться с помощью стола 9 для пациента, регистрируя хирургического робота 5 посредством устройства 12 отображения, в котором может использоваться изображение, сформированное устройством 12 отображения и показывающее, по меньшей мере, часть хирургического робота 5, такую как часть хирургического инструмента 24, и используя определенную регистрацию между устройством 12 отображения и столом 9 для пациента. Регистрация между хирургическим роботом 5 и столом 9 для пациента может также быть выполнена другим способом. Например, хирургический робот 5 и стол 9 для пациента могут быть зарегистрированы, основываясь на известной геометрической конфигурации элемента 8 фиксации, обеспечивающего жесткое соединение.
Далее вариант осуществления медицинского способа применения медицинской процедуры к живому существу при использовании медицинской системы 1 будет примерно описан со ссылкой на блок-схему последовательности выполнения операций, показанную на фиг. 2.
На этапе 101 хирургический робот 5 прикрепляется к потолку 3 помещения 2, используя систему 7 крепления с элементом 6 сопряжения. На этапе 102 хирургический робот 5 жестко крепится к столу 9 для пациента, используя элемент 8 фиксации, после чего хирургическая операция выполняется на этапе 103, используя хирургический робот 5. В частности, на этапе 103 проекционные изображения формируются устройством 12 отображения и показываются на дисплее 22, в то время, как оператор управляет хирургическим инструментом 24 хирургического робота 5 через устройство 20 управления, используя устройство 21 ввода.
Если бы стол для пациента полностью нес вес хирургического робота , нагрузочная способность по весу пациента стола для пациента была бы уменьшена. Кроме того, в случае перемещения или расположения хирургического робота человек, такой как медсестра, должен был бы переносить весь вес хирургического робота, который может составить приблизительно 20 кг и т. п., что не может быть оптимальным с эргономической точки зрения и с точки зрения последовательности проведения операций. Дополнительно, в помещении для хирургического робота может понадобиться место для его хранения, когда он не используется, например, на тележке или в другом месте хранения, таким образом, требуя очень много ценного пространства в операционной. Кроме того, перенос хирургического робота полностью посредством стола для пациента может осложнить последовательность выполнения операций в операционной, потому что обычно плита стола для пациента может сниматься и при нормальной последовательности выполнения операций между двумя различными медицинскими процедурами поверхность стола снимается, чтобы транспортировать пациента. Это может означать, что между различными медицинскими процедурами тяжелый хирургический робот потребуется перемещать вручную.
Для преодоления, по меньшей мере, некоторых из этих недостатков, когда стол для пациента несет на себе весь вес хирургического робота, описанная выше со ссылкой на фиг. 1 медицинская система содержит хирургический робот, подвешенный на потолке через систему подвешивания, то есть, систему подвески. Когда хирургический робот не используется, он может быть отодвинут от стола для пациента. Когда хирургический робот используется, он может быть перемещен в положение над столом для пациента и здесь с помощью жесткого соединения стыковаться со столом для пациента, используя элемент фиксации, в то время, как хирургический робот все еще сопряженно соединяется с подвеской с помощью компенсатора силы тяжести, то есть, с помощью элемента сопряжения. Это подразумевает, что стол для пациента несет на себе не весь вес хирургического робота, а только часть веса, которая не компенсируется компенсатором силы тяжести на подвеске. Эта медицинская система предлагает очень удобное и экономичное решение для помещения хирургического робота в его рабочее положение, в котором стол для пациента и оператор, который помещает хирургического робота в его рабочее положение, не должны нести на себе весь вес хирургического робота. С одной стороны это уменьшает требующуюся нагрузочную способность стола для пациента, а с другой стороны это открывает возможность испоьзования более тяжелых хирургических роботов, которые могут быть способны выполнять более сложные процедуры. Так как хирургический робот продолжает стыковаться со столом для пациента через жесткое соединение, точность позиционирования и стабильность положения относительно пациента продолжают гарантироваться.
В варианте осуществления, описанном выше со ссылкой на фиг. 1, медицинская система содержит систему подвешивания к потолку или к стене, которая может также рассматриваться как система подвески, сопряженное соединение с компенсацией силы тяжести между системой подвешивания и оборудованием, которое должно позиционироваться, таким как хирургический робот в этом варианте осуществления, оборудование и жесткое соединение между оборудованием и базисной системой, то есть, базисным устройством, являющимся компонентом, определяющим положение и ориентацию оборудования. В варианте осуществления, описанном выше со ссылкой на фиг. 1, базисной системой является стол для пациента. Большую часть веса оборудования несет на себе система подвешивания через сопрягающее соединение. Система подвешивания позволяет перемещение оборудования в поле использования, когда оборудование действует, а также, когда оно находится в дежурном режиме или находится на хранении. Когда оборудование действует и требуется высокая точность положения между столом для пациента и оборудованием, оборудование будет стыковаться со столом для пациента, то есть, с базисной системой, через жесткий механизм стыковки, то есть через элемент фиксации. Тем не менее, большую часть веса оборудования несет на себе система подвешивания. Это означает, что стол для пациента должен нести на себе только часть общего веса оборудования. Так как оборудование сопряженно соединяется с системой потолка, то когда оборудование жестко крепится к столу для пациента, используя элемент фиксации, положение оборудования будет определяться положением стола для пациента, а не положением системы подвешивания. Кроме того, перемещения стола продолжают оставаться возможными, так как система подвешивания и сопрягающий элемент позволяют перемещение оборудования, жестко прикрепленного к столу для пациента.
Хотя в варианте осуществления, описанном выше со ссылкой на фиг. 1, оборудованием является хирургический робот, в других вариантах осуществления, оборудованием может также быть другой тяжелый компонент, который требует высокой точности позиционирования относительно пациента и с которым из-за его размеров и/или веса трудно работать вручную. Это оборудование предпочтительно является оборудованием, выполненным с возможностью использования в области хирургии или в сердечно-сосудистой области, в частности, в области минимально инвазивном хирургии. Оборудование может содержать, например, операционный робот, такой как описанный выше хирургический робот, роботизированную руку, систему управления катетером, навигационную систему и так далее, которые могут дистанционно управляться оператором через устройство управления, подобное устройству управления, описанному выше со ссылкой на фиг. 1.
Другие изменения раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения, исходя из изучения чертежей, раскрытия и приложенной формулы изобретения.
В формуле изобретения слово "содержащий" не исключает другие элементы или этапы и единственное число не исключает множественное число.
Одиночный блок или устройство может выполнять функции нескольких пунктов, представленных в формуле изобретения. Простой факт, что некоторые критерии представляются во взаимно различных зависимых пунктах формулы изобретения, не указывает, что сочетание этих критериев не может использоваться для достижения преимущества.
Любые ссылочные знаки в формуле изобретения не должны рассматриваться как ограничение объема изобретения.
Изобретение относится к медицинской системе для применения медицинской процедуры. Медицинская система содержит медицинское устройство, такое как хирургический робот с хирургическим инструментом для выполнения медицинской процедуры, в которой медицинское устройство выполнено с возможностью перемещения, например, перемещения хирургического инструмента относительно базисного устройства, такого как стол для пациента, чтобы применить медицинскую процедуру. Медицинское устройство крепится к стенке и/или к потолку помещения системой крепления и жестко крепится к базисному устройству элементом фиксации. Благодаря креплению к стене и/или к потолку, нет необходимости, чтобы вес медицинского устройства полностью нес на себе, например, стол для пациента, причем, благодаря жесткому креплению к базисному устройству, медицинская процедура может продолжать выполняться с высокой точностью.
Группа изобретений относится к медицине. Медицинская роботизированная хирургическая система для применения хирургической медицинской процедуры к живому существу содержит медицинское устройство для выполнения хирургической медицинской процедуры, систему крепления для крепления медицинского устройства к стене и/или к потолку помещения, элемент фиксации для жесткого крепления медицинского устройства к базисному устройству, пассивный элемент сопряжения между системой крепления и медицинским устройством. Медицинское устройство выполнено с возможностью выполнения перемещения относительно базисного устройства для применения хирургической медицинской процедуры. Медицинское устройство содержит медицинское роботизированное устройство и/или устройство управления катетером. Система крепления является системой подвешивания для подвешивания медицинского устройства на стене и/или потолке помещения. Элемент сопряжения выполнен с возможностью обеспечения сопряжения при перемещении медицинского устройства относительно системы крепления. Базисное устройство является средством поддержки для поддержки живого существа, и причем элемент фиксации выполнен с возможностью жесткого крепления к средству поддержки. Медицинский способ применения хирургической медицинской процедуры к живому существу посредством использования медицинской роботизированной хирургической системы содержит этапы, на которых прикрепляют медицинское устройство к стене и/или к потолку помещения посредством системы крепления, жестко прикрепляют медицинское устройство к базисному устройству посредством элемента фиксации, тем самым перемещая медицинское устройство относительно крепления посредством использования элемента сопряжения, осуществляют хирургическую медицинскую процедуру посредством медицинского устройства. Изобретение обеспечивает повышение нагрузочной способности средства поддержки, на котором располагается живое существо, при точном выполнении медицинской процедуры. 2 н. и 6 з.п. ф-лы, 2 ил.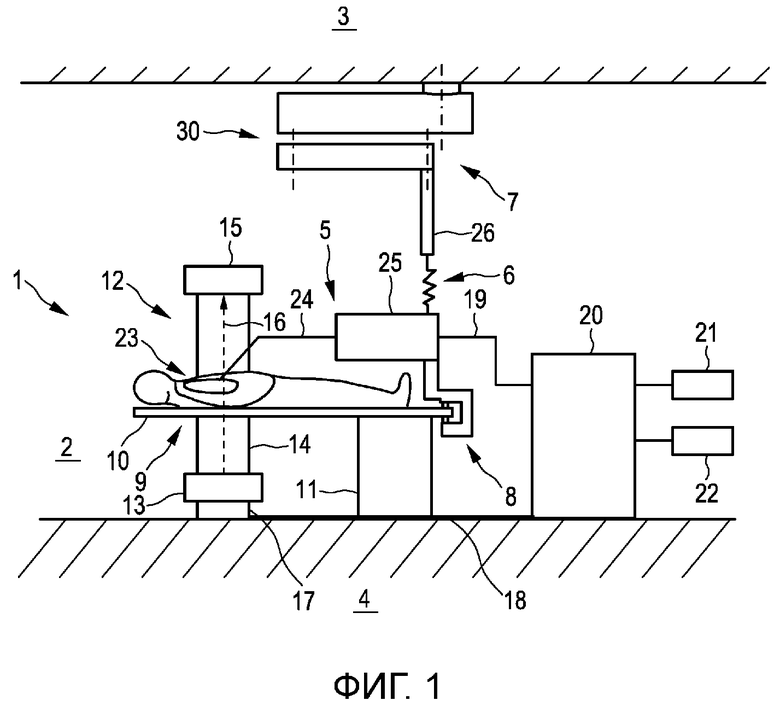
1. Медицинская роботизированная хирургическая система для применения хирургической медицинской процедуры к живому существу, причем медицинская роботизированная хирургическая система (1) содержит:
– медицинское устройство (5) для выполнения хирургической медицинской процедуры, причем медицинское устройство выполнено с возможностью выполнения перемещения относительно базисного устройства (9) для применения хирургической медицинской процедуры, причем медицинское устройство (5) содержит медицинское роботизированное устройство и/или устройство управления катетером,
- систему (7) крепления для крепления медицинского устройства (5) к стене и/или к потолку (3) помещения, причем система (7) крепления является системой подвешивания для подвешивания медицинского устройства (5) на стене и/или потолке (3) помещения (2),
- элемент (8) фиксации для жесткого крепления медицинского устройства (5) к базисному устройству (9),
- пассивный элемент (6) сопряжения между системой (7) крепления и медицинским устройством (5), причем элемент (6) сопряжения выполнен с возможностью обеспечения сопряжения при перемещении медицинского устройства (5) относительно системы (7) крепления, и
– при этом базисное устройство (9) является средством поддержки для поддержки живого существа (23), и причем элемент (8) фиксации выполнен с возможностью жесткого крепления к средству поддержки.
2. Медицинская роботизированная хирургическая система по п. 1, в которой элемент (6) сопряжения содержит пружинный элемент.
3. Медицинская роботизированная хирургическая система по п. 1, в которой элемент (6) сопряжения выполнен с возможностью обеспечения возможности перемещений медицинского устройства относительно системы крепления по меньшей мере на 10 см.
4. Медицинская роботизированная хирургическая система по п. 1, в которой система (7) крепления выполнена с возможностью подвижного крепления медицинского устройства (5), так что медицинское устройство (5) выполнено с возможностью перемещения в различные расположения и/или в различные положения.
5. Медицинская роботизированная хирургическая система по п. 1, в которой средством поддержки является стол для пациента.
6. Медицинская роботизированная хирургическая система по п. 1, в которой для первого сеанса работы медицинское устройство (5) выполнено с возможностью жесткого крепления к базисному устройству (9) посредством элемента (8) фиксации для обеспечения жесткого соединения между медицинским устройством (5) и базисным устройством (9), причем после отсоединения от базисного устройства для второго сеанса работы медицинское устройство (5) выполнено с возможностью повторного жесткого крепления к базисному устройству (9) посредством элемента (8) фиксации для обеспечения жесткого соединения между медицинским устройством (5) и базисным устройством (9), причем элемент (8) фиксации выполнен таким образом, что пространственное соотношение между медицинским устройством (5) и базисным устройством (9) является одинаковым при первом и втором сеансах работы.
7. Медицинская роботизированная хирургическая система по п. 1, в которой медицинская система (1) дополнительно содержит устройство (12) отображения для формирования изображения живого существа (23) во время хирургической медицинской процедуры.
8. Медицинский способ применения хирургической медицинской процедуры к живому существу посредством использования медицинской роботизированной хирургической системы по п.1, причем медицинский способ содержит этапы, на которых:
- прикрепляют медицинское устройство к стене и/или к потолку (3) помещения посредством системы (7) крепления, причем система (7) крепления является системой подвешивания для подвешивания медицинского устройства (5) на стене и/или потолке (3) помещения (2), причем медицинское устройство выполнено с возможностью выполнения перемещения относительно базисного устройства (9) для применения хирургической медицинской процедуры, причем медицинское устройство (5) содержит медицинское роботизированное устройство и/или устройство управления катетером,
- жестко прикрепляют медицинское устройство (5) к базисному устройству (9) посредством элемента (8) фиксации, тем самым перемещая медицинское устройство (5) относительно крепления (7) посредством использования элемента (6) сопряжения, и
- осуществляют хирургическую медицинскую процедуру посредством медицинского устройства (5), и
– причем базисное устройство (9) является средством поддержки для поддержки живого существа (23), и причем элемент (8) фиксации выполнен с возможностью жесткого крепления к средству поддержки.
| US 20110028894 A1, 03.02.2011 | |||
| Способ определения режущих свойств инструментальных материалов | 1957 |
|
SU122326A1 |
| US 6933695 B2, 23.08.2005 | |||
| US 8002464 B2, 23.08.2011 | |||
| US 20100204646 A1, 12.08.2010. | |||

